BM3D 与PCNN 结合的海底管道侧扫声呐图像处理方法
2023-06-28陈林白兴兰胡轲
陈林,白兴兰,胡轲
(浙江海洋大学船舶与海运学院,浙江省近海海洋工程技术重点实验室,浙江舟山 316022)
海底管道是海洋开发资源特别是油气资源的重要输送工具,长期铺设在海底的管道会因海流的冲刷产生悬空现象,海底管道悬空若不及时检测并加以处理,会造成海底管道疲劳断裂,导致石油、天然气等泄露,将会造成巨大的经济损失和环境污染。侧扫声呐(side-scan soanr,SS)运用入射声波反向散射原理来生成侧扫声呐图像(side-scansoanr image,SSI),能够对海底管道的状态进行直观判断。海底复杂的环境,使得SSI 的采集受到很大的噪声影响,存在混合复杂的各种噪声,导致图像细节的缺失。SSI 图像去噪的目的在于消除噪声,同时尽可能保留图像上的纹理、边缘和其他细节[1~2]。在对海底管道SSI 中的目标进行识别和状态判断之前,进行图像分割是至关重要的一步,图像分割通常是将图像分割为目标高亮区、阴影区以及海底混响区三类,而海底管道SSI 噪声复杂,斑点噪声突出,如何抑制噪声干扰,使分割图像得到完整准确的目标及阴影是研究热点问题[3]。
针对SSI 去噪方面,学者们提出了多种降噪方法,如均值滤波法、中值滤波法、基于小波变换法等,但去噪效果却不是很理想[4~5]。为改善去噪效果,王雷等[6]采用了不同阈值对海底管道SSI 进行小波阈值去噪。张晓娟等[7]利用超小波脊波变换方法解决了去噪过程中的过平滑问题。石建飞等[8]提出了结合非局部先验性与加权核范数最小化的去噪算法。WANG Xingmei,et al[9]提出了一种基于黄金比的自适应非局部空间信息水下声呐图像去噪方法。LU Huimin,et al[10]提出了二维快速离散Curvelet 变换作为软阈值的一种去噪方法。ZHAO Kun,et al[11]提出了一种结合二维经验模态分解(BEMD)和非局部均值(NLM)算法的SSI 去噪方法。DABOV,et al[12]提出的基于变换域增强稀疏表示的三维块匹配(BM3D)算法的图像去噪方法在去噪方面要优于其他图像去噪算法。陈朋等[13]将BM3D 算法进行改进,对SSI 散斑噪声的消除有良好效果。同时国内外学者提出了多种用于SSI 分割的方法,如郭海涛等[14]提出的基于MAR 与FCM 聚类的声呐图像分割方法具有分割准确和收敛速度快的优点。李庆武等[15]提出了基于NSCT 域边缘检测的SSI 分割方法。何义才等[16]提出了综合利用NSCT 分解图像、局部标准差和均值组合增强图像和多重分形判断图像奇异性的SSI 分割方法。SONG Yan,et al[17]提出了一种针对斑点噪声和噪声强度不均匀的声呐图像分割方法。WU Meihan,et al[18]提出了一种新的卷积神经网络结构以实现SSI 分割。ABU,et al[19]提出了基于增强模糊局部信息的声呐图像分割方法,可解决图像噪声强度不均匀的问题。ECKHORN,et al[20]和REITBOECK,et al[21]在对猫视觉皮层研究中发现神经元中有同步脉冲发放现象并提出了同步脉冲发放现象的连接模型。JOHNSON,et al[22-23]和RANGANATH,et al[24]对上述模型进行研究开发并提出了脉冲耦合神经网络(PCNN),且在图像处理方面效果良好。
拟运用BM3D 算法对海底管道SSI 进行去噪处理,通过自编程序将实验结果图像进行无参考图像评价指标数值计算,并与其他去噪方法进行对比分析,体现BM3D 算法对海底管道SSI 去噪处理的有效性与优越性。针对海底管道SSI 噪声混合复杂,目标分割困难的问题,提出了一种基于三维块匹配(BM3D)与PCNN 结合的SSI 分割方法。文中对真实海底管道SSI 进行仿真处理,从主观评价与客观评价上与传统PCNN 图像分割方法相比较,验证其有效性和优越性。
1 基于BM3D 算法的图像去噪方法
1.1 BM3D 算法
BM3D 算法借鉴了非局部均值(NL-Means)方法的非局部块匹配思想,通过与相邻图像块进行匹配,将若干相似的块整合为1 个三维矩阵,在三维空间进行滤波处理,再将结果反变换融合到二维,形成去噪后的图像[25]。BM3D 算法由2 大步骤组成,即基础估计和最终估计阶段,每一阶段又分别包含3 个部分:块匹配、协同滤波和聚合。图1 为BM3D 算法流程图。

图1 BM3D 算法流程图Fig.1 Flow chart of BM3D algorithm
1.1.1 基础估计
首先将含有噪声的图像按照移动窗步长划分成固定大小的若干块,对每一个参考块都要进行至少一次块匹配和3D 变换域滤波。然后将所有参考块处理完成之后,把所有参考块的预估值返回到图像的原始位置进行加权平均,最后得到基础估计后的图像。对带有噪声的图像,可以用公式(1)获得其加性噪声:
式中:(x)为有噪声的图像;y(x)为没有噪声污染的原始图像;η(x)为添加的加性噪声;x为图像的像素点坐标;Ω 为整幅图像的像素点集合。文中的硬阈值滤波和维纳滤波分别用ht和wie标识。
(1)块匹配
在理想情况下,对于无噪声图像y(x)上的某个大小为Nht1×Nht1的参考块YxR和待匹配的图像块Yx,块匹配过程中参考块YxR与图像块Yx之间的距离可由公式(2)计算得:
式中:R和x分别表示2 个图像块左上角的坐标,Nht1是图像块的大小,‖·‖2是L2 范数。理想的图像y(x)不能直接获得,获得的图像一般为含有噪声的图像,故可以按公式(3)计算距离:
如果参考块ZxR和图像块Zx之间是没有重叠的,也就是每个像素是独立的,那么在噪声图z(x)上对应位置的参考块与图像块的匹配误差的数学期望以及方差分别为:
当噪声方差很大或者图像分块比较小时,直接在有噪声图像z(x)上寻找相似块是不准确的,可能会发生分组错误。解决的方法是对有噪声图像z(x)上的两个图像块进行可分离的二维正交变换,然后将那些幅度小于一定阈值的系数置零,这样2 个块的匹配误差就可表示为这些系数的均方误差,即:
式中:γ′为硬阈值操作,相应的阈值一般为2 个标准差;Tht2D为相应的可分离二维正交变换。
根据公式(6)计算得到当前参考块与其他所有图像块的匹配误差后,我们只保留那些误差小于一定阈值的图像块,并得到相应的坐标集合,参考块ZxR的相似图像块集合可得:
式中:τhtmatch为判定2 个块相似的最大误差阈值,一般根据经验来设置。
(2)协同滤波
将所有的相似块按距离由小到大顺序堆叠起来,就可以得到一个形状大小为代表该集合元素的个数。得到参考块对应的3D 数组后,可进行3D 协同变换和滤波,可表示为:
式中:Tht3D为相应的3D 正交变换;γ 表示用阈值进行硬阈值滤波;Tht-13D为3D 线性逆变换。
可以根据协同滤波后剩余的非零系数的个数来进行权值的分配,假设该3D 组合内所有的像素都是独立的,记硬阈值操作后剩下的系数个数为NxRhard,则可以进一步用公式(9)计算重复的像素权重:
式中:σ2为噪声方差;Nxhard为不为零元素的个数。
(3)聚合
由于参考块之间可能存在重叠且每个参考块都包含有自身在内的多个相似块,因此每一个像素点的像素值都会被重复预估,将所有参考块的预估值返回到图像的原始位置,进行像素点的加权平均就可以得到基础估计图像:
χxm∈{0,1}是位于xm∈Ω 处相似块的特征函数;Ybasic(x)表示第一步得到的基础估计图像。
1.1.2 最终估计
(1)块匹配
从基础估计阶段得到的基础估计图像,可得到候选匹配块集合为:
由SwiexR可以得到2 个三维矩阵,堆叠基础估计图像匹配块得到的三维矩阵,堆叠含噪图像匹配块得到三维矩阵。
(2)协同滤波
最终估计阶段的滤波要用维纳滤波取代硬阈值滤波,可得:
定义维纳滤波的收缩系数为:
相比于基础估计阶段的硬阈值滤波,最终估计阶段的维纳滤波能够抑制所有频段的噪声,同时也不会完全地抹杀掉高频的信息,从而获得更好的降噪效果。
(3)聚合
类似于基础估计阶段,对图像中每一个参考块都进行维纳滤波后,我们同样需要对这些结果进行整合。这个阶段也有可能发生像素点重叠,可分配权重值:
最后求得最终估计图像为:
1.2 实验对比与分析
为了验证BM3D 算法,选取真实的海底管道侧扫声呐图像进行去噪处理,并对去噪图像质量进行指标评价,实验在matlab 2020a 软件平台上进行。主观评价上,通过人本身的视觉检查去噪图像的一些可视特点,比如去噪图像边缘保持能力、模糊程度,点目标保持以及在客观上难以被察觉的一些细节等等。在客观指标评价上,去噪图像的视觉评估可以通过公认的图像评价手段,包括全参考图像质量、半参考图像质量和无参考图像质量评价指标[26]。
1.2.1 无参考图像质量评价指标
由于真实的海底管道SSI 是没有参考图像比较的,所以本文采用了2 种无参考图像质量评价指标来比较不同去噪算法对图像处理的优越性,评价指标包括等效视数和散斑抑制指数。
(1)等效视数
式中:μ 为图像均值;σ 为图像标准差。EENL的值越高,图像均匀区域噪声的平滑效率越高。
(2)散斑抑制指数
式中:I1为含噪声图像,I2为经过去噪处理的图像,该指数体现算法对于散斑噪声的抑制效果,如果去噪算法能够有效降低散斑噪声,指数往往是小于1 的,并且数值越低,说明抑制散斑噪声效果越好。
1.2.2 实验设计
实验选取的海底管道图A 来源文献[6],海底管道图B 和图C 为浙江省舟山海域的实测图,如图2 所示。

图2 海底管道侧扫声呐实测图像Fig.2 Actual SS image of submarine pipeline
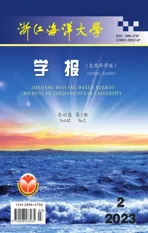
分别运用均值滤波,中值滤波,小波变换,NLM 算法和BM3D 算法进行对比实验,各算法进行去噪后的效果图见图3(a)~(o)所示。
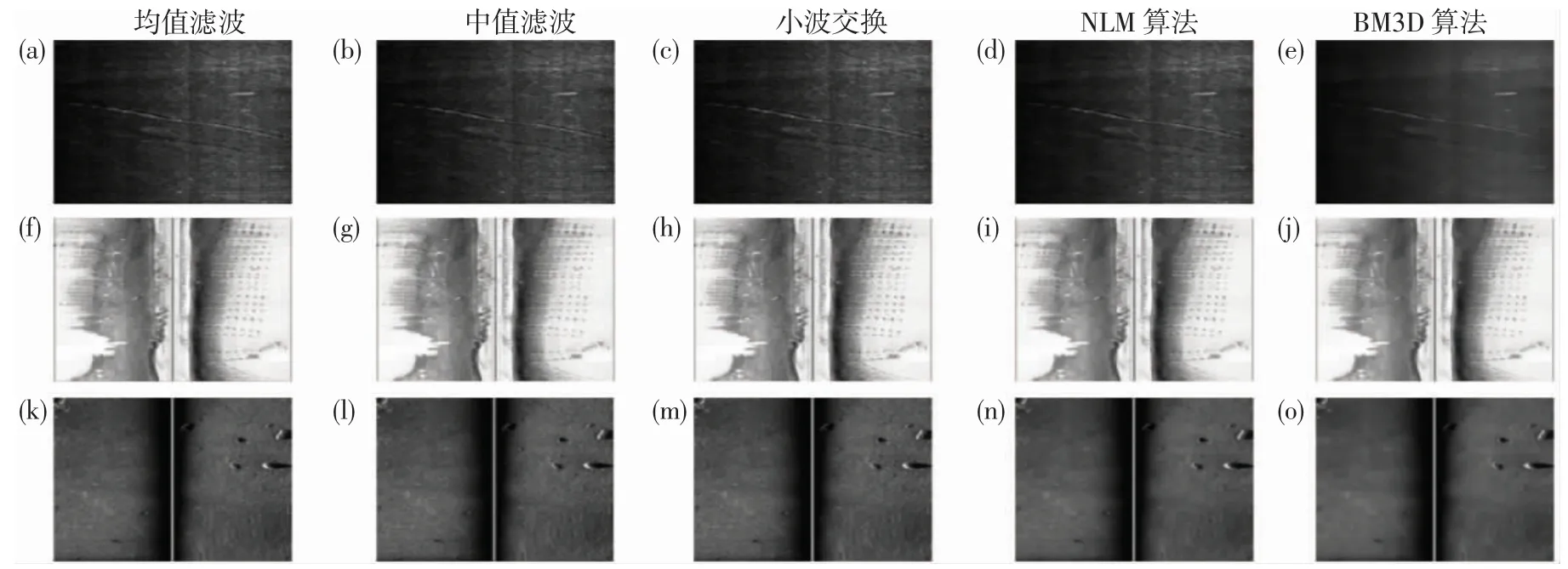
图3 各算法图像处理效果图Fig.3 Effect of image processing using the different methods
图3 中(a)~(e)为图2A 的去噪效果图,(f)~(j)为图2B 的去噪效果图,(k)~(o)为图2C 的去噪效果图。在主观感受上,均值滤波和中值滤波的去噪效果不明显,仍存在大量斑点噪声;小波变换的去噪结果图像中的斑点噪声被消除了部分,但也使得图像模糊化;NLM 算法的降噪结果相比较实验图像,消除噪声比较明显,但仍存在部分或明或暗的斑点噪声;BM3D 算法的去噪效果图中,从视觉上对检测噪声图像的噪声消除效果更明显,图像平滑效果更好,并很好地保留了图像的边缘细节特征,很明显去噪效果要优于上述几种去噪方法。
在客观评价上,对不同算法对SSI 的处理效果进行无参考图像质量评价指标计算,具体见表1。由表1可知:(1)等效视数:BM3D 算法的指标数值明显大于其他方法;(2)散斑抑制指数:BM3D 算法的指标数值低于其他算法。可见,BM3D 算法对于悬跨海底管道SSI 的去噪效果更好,能够很好地抑制散斑噪声并且保存图像的纹理细节。
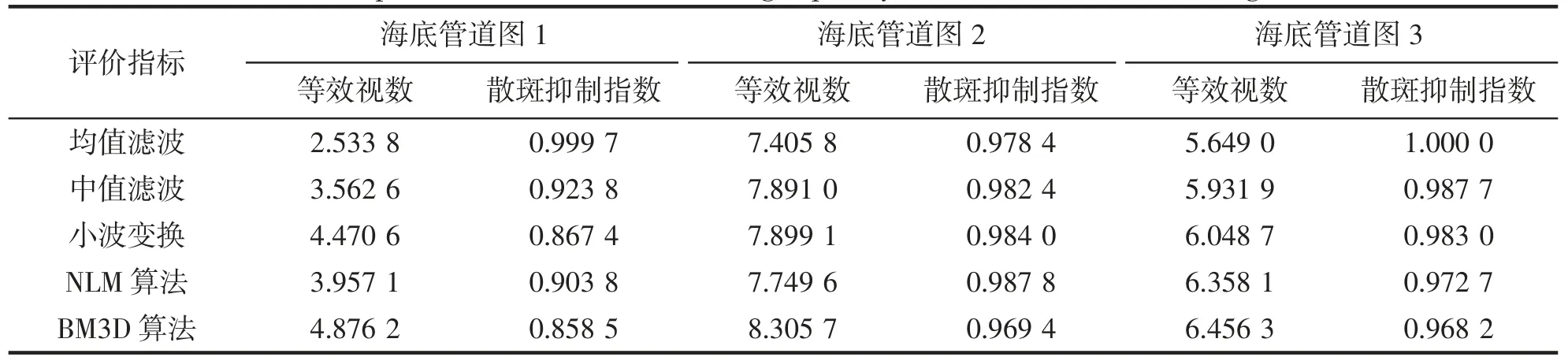
表1 不同算法的无参考图像质量评价对比Tab.1 Comparison of unreferenced image quality evaluation of different algorithms
2 基于BM3D-PCNN 的侧扫声呐图像分割
2.1 BM3D-PCNN 图像分割方法
SSI 目标分割困难,且传统PCNN 不能很好地消除噪声影响,结合BM3D 和PCNN 提出一种新的图像分割方法,即将BM3D 算法运用于PCNN 图像分割方法中,能很好地消除噪声对分割结果的影响,使得图像特征目标分割更加准确。PCNN 算法的基本模型结构由接收域、调制域和脉冲发生器3部分组成[27],如图4 所示。

图4 PCNN 基本模型结构Fig.4 PCNN basic model structure
由图4 可知:神经元Nij模型有5 个主要部分,即反馈输入Fij(n)、连接输入Lij(n)、内部活动Uij(n)、动态阈值Eij(n)和脉冲输出Yij(n)。其中,反馈输入Fij(n)和连接输入Lij(n)可分别表示:
式中:αF、αL分别表示记录先前输入状态的指数衰减因子;VF、VL是调节周围神经元动作电位的权重因子;Mijkl、Wijkl分别为反馈输入域和耦合连接域的权重矩阵。Sij是一种外馈输入激励,对脉冲耦合突触调制有重要影响。
根据脉冲耦合神经网络的计算机理,反馈输入和连接输入之间的非线性调制产生内部活动Uij(n),从而推导出膜电位的耦合结果,即:
式中:β 为连接系数,它直接决定了连接输入Lij(n)在内部活动Uij(n)中的强度。式(20)显示了对神经元输入的调节耦合。显然,反馈输入Fij(n)由于其权重分配在耦合调制中起着最重要的作用,而连接输入Lij(n)则受到邻近神经元的次要影响。根据内部活动Uij(n)和动态阈值Eij(n)的比较结果,神经元的脉冲输出Yij(n)和动态阈值Eij(n)描述分别为:
式中:αE是指数衰减因子。其值越小,前一次迭代对动态阈值的影响越明显。VE是动态阈值的幅值,神经元产生输出脉冲时VE会瞬间增大。式(22)中,如果一个神经元的内部活动Uij(n)强度大于其动态阈值Eij(n),神经元将立即触发并产生一个输出脉冲。
2.2 实验结果
为验证PCNN 算法的有效性,以matlab R2020a 为平台,由于图2A 不清晰,因此仅对海底管道图2B和海底管道图2C 进行仿真研究。分别运用传统PCNN 算法和BM3D-PCNN 对图2B 和图2C 的侧扫声呐图像进行分割处理,如图5 所示。分别从主观和客观两方面对图像分割质量进行评价。
图5 图像分割效果Fig.5 Image segmentation effect
2.2.1 主观评价
主观评价是通过人体本身的视觉对分割图像纹理细节检查。通过对图5 中原图像与分割结果图像主观评价分析,海底管道图2B 和海底管道图2C 的分割图像都不存在过分分割情况,分割的区域也比较平滑,分割的效果适合人眼观察识别,图像信息细节等得到了充分显示。但是传统的PCNN 算法分割结果仍然存在大量的噪声干扰,对噪声干扰的抑制效果比较低。该算法的分割结果基本消除了噪声干扰,只将图像中的特征信息分割出来,分割效果比较完美。
2.2.2 客观评价
为了更加准确的评估图像分割方法的准确性和图像分割质量,本文采用了3 种图像分割质量评价指标对分割图像效果进行评价,包括Jaccard 相似系数[28]、Dice 系数[28]和精确度(Precision)[29]。
(1)Jaccard 系数
Jaccard 系数又称为Jaccard 相似系数(Jaccard similarity coefficient)用于比较有限样本集之间的相似性与差异性。Jaccard 系数值越大,样本相似度越高。
(2)Dice 系数
Dice 系数是一种集合相似度度量函数,通常用于计算2 个样本的相似度,取值范围在[0,1],数值越大,相似度越高。
(3)精确度(precision)
精确度是表示标记正确的样本数量占总样本的比例,精确度越高,表示图像分割效果越好。
评价得到的结果如表2 所示,可知:该分割算法对于图2B 和图2C 的图像分割质量评价指标数值均高于传统PCNN 算法,验证了本文提出方法的优越性。但受图2B 本身图像特征的影响,使得图像分割质量评价指标优势不太明显。

表2 图像分割质量评价数据Tab.2 Image segmentation quality evaluation data
3 结论
侧扫声呐能够对海底管道状况进行检测,并根据其图像直观判断海底管道状态,保障其安全运行。基于实测SSI 图像,将提出的图像去噪、图像分割方法在matlab 2020a 软件平台进行了实验验证,得到了如下有意义的结论:
(1)基于块匹配、协同滤波、聚合等,建立BM3D 方法用于海底管道SSI 的去噪处理。
(2)通过无参考评价指标将BM3D 去噪方法与均值滤波、中值滤波、小波变换、NLM 算法进行对比分析,其等效视数分别高于其他算法40.5%、40.6%和9.8%以上,散斑指数分别低0.9%、0.9%和0.5%,体现了BM3D 算法良好的去噪效果,能更好地体现海底管道状态。
(3)基于去噪方法BM3D,并结合脉冲耦合神经网络图像分割方法,提出BM3D-PCNN 方法,即PCNN分割方法基础上,先消除噪声影响,使得图像目标分割更加准确。
(4)图像处理的指标评价。分别运用Jaccard 相似系数、Dice 系数和Precision 3 种评价指标,通过对比发现BM3D-PCNN 算法分割处理图像明显优于传统PCNN 算法。