加速退化试验测量不确定度评定方法
2023-06-28郭宏轩孙富强
郭宏轩,孙富强,*
1.北京航空航天大学 可靠性与系统工程学院,北京 100191
2.可靠性与环境工程技术国防科技重点实验室,北京 100191
加速退化试验(Accelerated Degradation Testing,ADT)是指在退化机制不变的基础上,利用产品在高(加速)应力水平下的性能退化数据外推评估正常应力水平下的产品寿命指标的试验技术,为解决高可靠长寿命产品的寿命指标快速验证评价问题提供了一条有效途径。
为了收集产品的性能退化数据,加速退化试验过程中需要对产品的关键功能和/或性能参数进行测量。各种测量过程中测量误差都是客观存在、不可避免的。目前,在加速退化试验研究中,国内外学者通常采用在退化模型中添加误差项的方式来表征测量误差,以提高建模准确性。Zhang等[1]、Ye和Xie[2]分别对考虑测量误差的加速退化模型的相关研究进行了综述分析。然而,误差的定义为测量结果与其真值之差,是一个理想化的概念[3]。由于真值往往是得不到的,通常采用近似真值(参考值、标准值和平均值等)代替,即近似真值和测量结果均存在不确定性,导致误差本身也存在不确定性[4]。
为此,计量学领域提出测量不确定度的概念来解决该问题。测量不确定度是与测量结果相联系的参数,用于表征合理地赋予被测量值的分散性,是对由测量结果给出的被测量估计值的可能误差的度量,是对表征被测量的真值所处范围的评定[5]。测量不确定度不是对长期沿用“测量误差”的否定,而是经典误差理论发展和完善的产物,更趋科学合理。国际计量局等7个国际组织修订和发布了“测量不确定度表示指南(Guide to the expression of Uncertainty in Measurement, GUM)”[6],中国也原则上等同采用GUM制定了测量不确定度评定与表示的相关标准[7-8]。
上述规范和标准有力地推动了测量不确定度理论在各个领域测量结果质量评价中的应用。Fu等[9]研究了故障定位算法的参数估计过程中测量不确定度的影响,并根据不确定度的分布,利用极大似然估计法降低了该影响。Pueo等[10]利用GUM法建立了双侧翼齿轮滚动测试中的测量不确定度的一般表达式。Wojtyła等[11]对三坐标测量机的测量不确定度评估方法进行了研究,并提出了一种基于实际工况的B类不确定度评估方法。薛长利等[12]对国内航天领域中测量不确定度的发展过程与应用现状进行了回顾与分析。冉学臣[13]基于GUM法对旋转弯曲疲劳试验的结果进行了测量不确定度评估。沈凤霞[14]基于振动环境试验系统,基于测量不确定度的评定方法对力学环境试验中的测量不确定度进行了数值评定;周佩[15]在气动先导电磁阀的可靠性分析研究中,对可靠性试验中的测量不确定度进行了分析与评定。
加速退化试验的主要目的是通过试验测量受试产品的性能退化数据,试验结束后通过对测量数据的分析进行试验结果评价,评估受试产品的可靠性与寿命指标。在此过程中,同样会存在性能参数的测量不确定度问题,并经过建模与参数估计过程的传播效应,对最终可靠性与寿命评估结果的可信性和可接受性产生较大影响。但是,目前尚未见在加速退化试验领域开展测量不确定度的研究报道。因此,本文将在分析加速退化试验中不确定度来源与传播过程的基础上,给出加速退化试验测量不确定度评定的思路和方法,提高试验结果评定的科学性和准确性。
1 加速退化试验方法
1.1 主要流程
加速退化试验的主要流程如图1所示,具体实施步骤如下:首先,根据产品机理分析结果,找出影响产品寿命的关键机制类型及其对应的敏感应力、监测参数等;其次,制定加速退化试验方案,确定产品样本量、应力施加方式、应力大小、试验时间、检测频率等要素;然后,搭建产品加速退化试验应力施加系统和性能参数测量系统,根据试验方案实施加速试验,并按照要求进行产品功能和性能参数监测;最后,建立加速退化模型,通过对试验数据进行统计分析估计模型未知参数,利用统计推断给出受试产品可靠性与寿命评估结果。数据处理是加速退化试验的核心,下文将重点介绍。
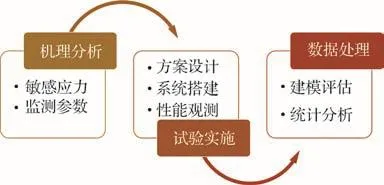
图1 加速退化试验主要流程Fig.1 Main process of ADT
1.2 ADT评估模型
加速退化试验评估的首要任务是建立描述产品性能变化趋势的退化模型。维纳过程模型是目前应用最为广泛的退化建模方法,模型形式为
式中:Y(t)为t时刻产品性能值,Y(0)=0;μ为漂移参数,反映产品退化速率;σ为扩散系数,一般为常数;B(t)为一个用于表征退化过程随机性的标准布朗运动过程,B(t) ~N(0,t)。
为了对产品在正常使用条件下的可靠性与寿命指标进行评估,还需要构建不同应力水平与退化速率之间的关系,即加速模型。加速模型主要取决于应力类型。以温度和湿度综合应力为例,通常采用Peck模型作为加速模型。采用维纳过程建立ADT模型时,通常假设漂移系数μ为一个与应力相关的函数,实现加速模型与退化模型的结合,即
式中:Ea为激活能;T为绝对温度;RH为相对湿度;kB为玻耳兹曼常数,取为8.617×10-5eV/K;a、C为常数。
将式(2)代入式(1),即可构建基于维纳过程的加速退化模型。在此基础上,根据维纳过程的首穿时服从逆高斯分布的性质,给定产品性能参数的退化失效阈值ω,即可推导出给定应力水平下的产品可靠度评估结果
式中:Φ(·)为标准正态分布的累积概率分布函数;μ为给定应力水平下的退化速率。
1.3 参数估计方法
为了使用上述模型开展产品可靠性评估,需对ADT中收集的试验数据进行统计分析,采用极大似然估计等方法对模型未知参数进行辨识。具体参数估计过程如下:
将n个样本随机分成k组,进行k应力水平的恒定应力加速退化试验(Constant Stress Accelerated Degradation Testing, CSADT)。S0为正常应力水平,S1<S2<…<Sk为加速应力水平。以温湿度应力为例,第(ll=1,2,…,k)个加速应力水平Sl下,投了nl个样本,且该应力下每个产品的性能均检测了为ml次后结束试验。试验中共检测m次,每次同时产品性能进行监控的时间为tli(jl= 1, 2,…,k;i=1,2,…,nl;j=1,2,…,ml),监控到的性能值记为ylij。令Δylij=yl(ij+1)-ylij,检测时间间隔为Δtlij=tl(ij+1)-tlij,则根据维纳过程模型中性能退化增量服从正态分布的特性,得到CSADT的对数似然函数[16]为
式中:μl= exp(A-Ea/(kBTl)+Cln RHl)为加速模型。
加速模型的参数A、Ea、C可以通过最小二乘方法进行估计[17]。通过对产品在每个加速应力水平下的性能退化数据进行线性回归分析,可得到L个加速应力水平下的性能退化率μl(l=1,2,…,L)。根据加速模型lnμl=A-Ea/(kBTl)+C·ln(RHl),通过在应力水平(Tl, RHl)和性能退化率μl构成的二维平面进行最小二乘准则下的拟合分析,即可得到参数A、Ea、C的估计值
对式(4)中参数σ求偏导,即可利用极大似然估计方法求得参数σ的估计值。σ2的极大似然估计表达式
1.4 ADT测量不确定度来源及传播效应分析
在加速退化试验中,由于仪器误差、测量环境、人员操作不当等因素,测量结果和实际真值之间会存在偏差。测量误差是测量结果与真值的差值,但由于真值往往无法得到,误差也难以确定。而测量不确定度是对测量结果的精确性,或者说分散性的描述。测量不确定度与测量结果相联系,是无正负号的参数,用标准差或标准差的倍数或置信区间的半宽来表示,以评价测量结果质量的好坏[4]。
在加速退化试验中,导致性能参数监测结果产生测量不确定度的因素[14]主要有:①样本差异性导致抽取的样本不能完全代表所定义的被测量;②对测量过程受加速应力条件影响的认识不准确,或试验设备对应力条件的测量与控制不完善;③对模拟式仪器的读数存在人为偏差;④测量仪器计量性能上的局限性;⑤与测量原理、测量方法、测量程序有关的近似性和假设性;⑥在相同的测量条件下,被测量重复观测值的随机变化;⑦对一定系统误差的修正不完善;⑧测量中的粗大误差因不明显而未被剔除。
此外,因为加速退化试验的目的是利用测量数据建立加速退化模型以评估产品在正常应力下的可靠性水平,所以在此过程中还需要考虑产品性能观测的测量不确定度对最后可靠性评估结果的影响,即测量不确定度的传播效应。对于ADT来说,性能参数观测值的测量不确定度主要通过数据建模与参数估计过程传播到最终的评定结果。在此过程中,需要采用回归分析、极大似然估计等方法进行ADT模型的参数估计。因此,还需要对ADT模型参数估计过程中的测量不确定度进行传播分析与合成计算。
2 ADT测量不确定度评定方法
2.1 ADT测量不确定度的GUM评定方法
GUM是世界上通用的测量不确定度评价标准,其所提到的评定方法也是评估测量不确定度时最常用到的方法。这一方法的基本原理是利用不确定度传播律来得到被测量估计值,进行测量不确定度的评估,对应国内标准为JJF1059—2012《测量不确定度评定与表示》[7]。结合加速退化试验的建模分析过程,给出加速退化试验测量不确定度评价的GUM方法,如图2所示。
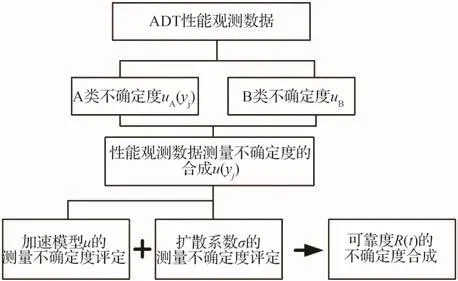
图2 ADT测量不确定度GUM评估流程Fig.2 GUM estimation procedure of ADT measurement uncertainty
2.2 性能观测数据的测量不确定度计算
GUM法将观测数据的测量不确定度的评定方法分为A类评定方法和B类评定方法,对应得到A类测量不确定度与B类测量不确定度,二者分别针对的是由统计方法得到的不确定度分量以及由非统计方法得到的不确定度分量。将二者合成可以得到GUM法的测量不确定度计算结果。需要注意的是,测量不确定度是由测量过程中的随机效应及系统效应导致的,从不确定度评定方法上进行的A类和B类评定与产生测量不确定度的原因无联系[7]。A类不确定度与B类不确定度的具体计算方法如下。
1) A类测量不确定度的计算方法
A类测量不确定度的评定指在同一条件下,对被测量进行独立重复的观测,并根据观测得到的数据运用统计分析的方法得到实验标准偏差,以此作为不确定度评定结果。通常采用贝塞尔公式计算实验标准差,以一个样本在某个观测时间点的测量数据为例,对于满足重复性测量条件的rN次重复观测结果yr,r=1, 2, …,rN,有
式中:uA(yr)为单个样本单次观测结果的标准不确定度为rN次观测结果平均值的测量不确定度为rN次重复观测数据的均值。显然作为观测结果比任何单次观测结果更可靠。
2) B类不确定度的计算方法
除了采用观测数据计算实验标准偏差的A类不确定度,还需考虑B类不确定度。B类不确定度是根据非试验直接观测量来进行评定的。其来源有:权威机构发布的量值,设备的校准证书,标准物质的量值,经检定测量仪器的准确度等级,通过经验推断的极限值等。通过以上给出的信息,可得到被观测数据的可能值区间半宽度aB,再选取合适的扩展因子kGB,则最终可得测量的B类不确定度为
假设ADT测量涉及的B类不确定度服从正态分布,参考JJF 1059.1—2012标准[7],取kGB=1.96。则ADT中性能参数观测数据的测量不确定度u(yr)的评定结果为
由此,即可完成GUM评定中性能参数观测数据不确定的计算与合成。
2.2.1 ADT建模过程中测量不确定度的传播合成
式(8)给出了ADT性能观测数据的测量不确定度评定结果。在此基础上,研究者最关心的是其对最后的产品可靠性评估结果的影响。一般来说,性能观测数据的测量不确定度会通过加速退化试验的建模与参数估计过程,最终传播到产品可靠性评估结果,因此还需要开展测量不确定度的传播效应分析。
根据ADT建模与参数估计过程,首先需要分析ADT中性能观测数据的测量不确定度如何传播到加速模型和扩散系数中。
在产品加速退化试验可靠度估计的过程中,模型参数θ={A,Ea,C,σ}的不确定度u(θ)需要结合参数估计的过程合成得到。在时刻t,可靠度R(t)可视作模型参数θ相关的函数,由此,通过将模型参数的不确定度进行合成,最终可得到可靠度估计结果对应的合成不确定度的评定结果uc(R(t))。
1) 加速模型参数的不确定度的计算
根据观测数据,可以直接计算每个应力下的退化速率。则第l组加速应力下退化速率的不确定度u(μl)计算公式[18]为
式中:yj为第j点处的观测数据,tj为观测时间点;ml为第l组应力下总测量点数。
进一步,将加速模型式(2)对数线性化,可得
式中:A=lna。
可以看出,式(10)为一个lnμ相对温度应力水平1/T和湿度应力水平ln(RH)的二元线性回归方程。在根据式(9)得到不同应力水平下退化速率的不确定度u(μl)后,取对数可得对应的u(lnμl)。令z=lnμ,a0=A,a1=Ea,a2=C,x1=-1/(kBT),x2=ln(RH),对于二元线性回归方程:z=a0+a1x1+a2x2,其系数a0、a1、a2的估计值[19-20]为
其中
在得到u(lnμl)后,采用文献[19-20]给出的二元线性回归方程系数的测量不确定度计算方法,即可得到加速模型参数A、Ea、C的测量不确定度的估计结果u(A)、u(Ea)、u(C)。
2) 正常应力水平下退化速率测量不确定度的传播合成
ADT的目标是评估正常应力水平(T0,RH0)下的可靠度,其中RH0为正常湿度水平,T0为正常温度水平。为此,首先需要将(T0, RH0)代入加速模型式(2),得到正常应力水平下的退化速率μ0。因此,在计算出加速模型参数的测量不确定度u(A)、u(Ea)、u(C)后,考虑测量不确定度的传播效应,还需要合成计算退化速率μ0的测量不确定度。
对于某含有S个元素hs(s=1,2,…,S)的测量模型f(h1,h2,…,hS)而言,其不确定度uc(f)可通过合成各个元素测量不确定度得到[7]。合成不确定度uc(f)的公式为
加速模型式(2)可视为一个含有A、Ea、C等多个元素的测量模型,假设模型参数之间相互独立,则每2个参数间的相关系数均为0。根据测量不确定度的合成计算公式(式(12)),可得正常应力下的退化速μ0=exp()A-Ea/(kBT0)+Cln(RH0)的测量不确定度为
3) 参数σ的不确定度计算
由第1.3节可知,参数σ可以通过极大似然估计得到,则其测量不确定度可通过对所有观测数据测量不确定度合成来进行量化。根据式(5),可以推导出参数σ2的测量不确定度
进一步,根据不确定度的合成公式(式(13)),可得参数σ的不确定度为
2.2.2 可靠性评估结果的测量不确定度评定
将估计得到的参数μ0、σ代入式(3),即可计算产品在正常应力水平下的可靠度。假设模型参数μ0、σ相互独立,则根据不确定度合成公式(式(13)),可靠性评估模型的合成不确定度uc(R(t))为
对应可得到可靠性评估结果的测量不确定度区间,记区间上下限分别为RGU和RGL,有
由于可靠度的取值范围是[0,1],为了保证计算得到的测量不确定度上下限不超出[0,1]区间之外,如果RGU计算结果大于1,则取值为1;如果RGL计算结果小于0,取值为0。
2.3 ADT测量不确定度的MCM评定方法
蒙特卡洛法(Monte Carlo Method,MCM)是一种通过重复采样实现分布传播规律的数值方法。采用蒙特卡洛进行测量不确定度评定的思路是根据ADT性能观测数据的重复测量结果计算其对应的分布,据此进行仿真抽样,再依照ADT评估流程进行仿真数据的退化建模与参数估计,并对多次抽样的可靠性评估结果进行统计分析,评定计算测量不确定度。MCM评定方法流程如图3所示,具体步骤如下:
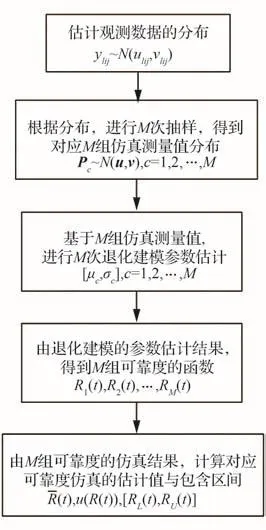
图3 加速退化试验测量不确定度MCM评估流程Fig.3 MCM procedure of ADT measurement uncertainty estimation
1) 对于第l个应力下第i个样本在第j次观测点上的性能观测数据ylij,假设其rN次重复观测的观测数据服从正态分布,可通过拟合得到其分布参数为N(ulij,vlij),令所有观测值的分布参数组成矩阵(u, v)。
2) 利用蒙特卡洛法分别对步骤(1)中每个观测点观测数据ylij进行M次仿真抽样,第k次抽样得到的点所组成的矩阵记作Pc,c=1,2,…,M,则得到M组仿真性能观测数据。
3) 采用1.2、1.3节中的方法,针对仿真得到的M组加速退化数据分别进行退化建模和统计分析,得到M组可靠性评估结果R1(t),R2(t),…,RM(t)。
4) 对步骤3)得到的M组可靠度评估结果进行平均,得到最终的可靠性评估结果为
5) 则可靠性评估结果的测量不确定度u(R(t))为蒙特卡洛法得到的M组可靠度评估结果的标准差
6) 将M组可靠度评估结果的取值按从小到大进行排列,可计算得到80%包含概率对应的上下界[8]为
3 应用案例
为了验证本文方法的有效性,以某型空间用高分子传感器的加速退化试验数据为对象进行案例分析。该传感器主要用于神舟飞船、货运飞船、空间站等装备舱室内、储运箱内环境湿度的检测,保障仪器设备、人员生存环境的舒适性与安全性。该传感器ADT的加速应力类型为高温和湿度复合应力,共设置4个应力水平,试验条件如表1所示。每个水平下投入3个样本,在每个观测时刻点,对所有样品的性能指标D值(表示高分子传感器的湿敏电容电极间距离)都分别进行3次重复测量。

表1 空间用高分子传感器ADT试验条件Table 1 ADT conditions of polymer sensor for space
按照上述条件开展高分子传感器加速退化试验,收集得到的传感器D值退化数据如图4所示。

图4 高分子传感器ADT观测数据Fig.4 Data of polymer sensor ADT
利用1.3节中方法对高分子传感器加速退化模型的参数进行求解,得到:A=-6.803、Ea=0.785、C=2.139 2、σ=0.016 0。
根据参数估计结果,即可得到D值的退化速率与温度、相对湿度2种应力的关系,即加速模型,如图5所示。将表1估计结果代入式(1)、式(3),即可得到传感器D值的加速退化模型与对应的可靠度函数。
3.1 传感器ADT测量不确定度GUM评定
利用GUM方法进行测量不确定度的评定,首先要考虑测量不确定度的来源。加速退化试验的测量数据是基于重复测量得到的,其后续的数据分析也是基于测量数据开展的。根据1.4节的分析,结合高分子传感器加速退化试验的具体情况,受传感器加速退化试验的测量条件、测量环境等因素影响,在实际的参数测量过程中,总会存在一定的分散性。同时,传感器的性能参数是利用LCR测量仪进行测量读取的,查阅相关设备信息并结合JJF 1059.1—2012[7]中给出的方法,可选取合适的分布和置信度,对仪器所引入的测量不确定度进行量化分析。
利用2.2节中方法,分别计算高分子传感器ADT观测数据的A类和B类测量不确定度。A类测量不确定度基于试验退化数据利用贝塞尔公式进行计算,B类测量不确定度按式(7)进行计算,其中区间半宽度aB为0.25,扩展因子kGB=1.96。而后利用式(8)进行合成,得到观测数据的合成不确定度。在此基础上,利用式(9),可分别计算得到4个应力水平下退化速率μl的测量不确定度为u(μl)=(4.019×10-7,4.044×10-7,4.083×10-7,4.125×10-7)。
根据式(9)~式(16),可计算出正常应力水平下的加速退化模型参数μ0、σ的不确定度评定结果为u(μ0)=3.017×10-7和u(σ)= 0.083 0。
最终,得到的正常应力水平(温度25 ℃,相对湿度50%RH)下高分子传感器的可靠度曲线及测量不确定度评定结果如图6所示。
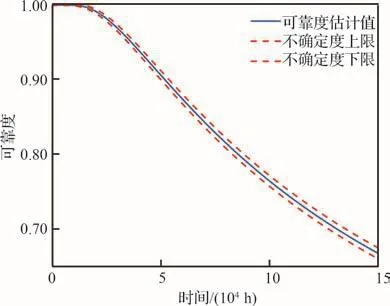
图6 正常应力水平下传感器可靠度曲线及测量不确定度评定结果(GUM)Fig.6 Reliability evaluation result and associated uncertainty interval of polymer sensor
3.2 传感器ADT测量不确定度MCM评价
假设高分子传感器ADT中每个观测时刻的重复测量数据服从正态分布,首先对各观测点数据的分布参数进行估计。在此基础上,根据求解得到的各观测时间点的正态分布参数,对性能参数进行M次抽样。为保证仿真结果精度,令抽样次数M=5 000,可得到对应的仿真样本空间如图7所示。
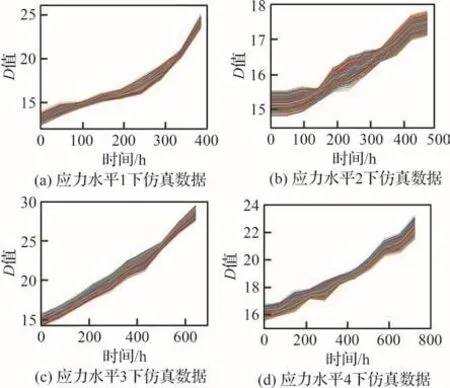
图7 ADT观测数据MCM仿真抽样结果Fig.7 MCM simulation results of observation data
根据1.2、1.3节的ADT模型参数估计与可靠性评估方法,对M组ADT仿真数据逐一进行分析评估,得到M组可靠度评估结果。通过计算均值和标准偏差,得到高分子传感器在正常应力水平下的可靠度评估结果和80%包含概率对应的上下界,如图8所示。

图8 基于MCM的传感器可靠度评估结果与对应80%包含区间Fig.8 Evaluation results of sensor reliability based on MCM and corresponding 80% inclusion interval
3.3 结果比较
分别采用上述两种方法进行ADT测量不确定度评定的结果对比见图9,可以看出利用2种方法得出的测量不确定度的区间宽度较为接近。
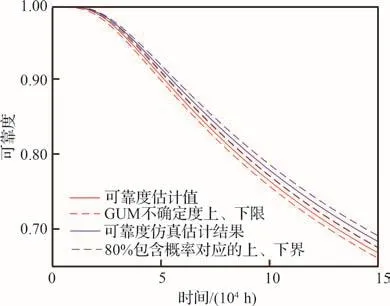
图9 可靠度评估结果对比Fig.9 Comparison of reliability evaluation results
以t=50 000 h为例,对比分析2种方法的测量不确定度评定结果。利用GUM方法计算得到的高分子传感器可靠度估计值为0.906 5,对应的测量不确定度计算结果为0.006 0,则GUM测量不确定度相对区间宽度WG为
采用MCM方法得到的高分子传感器可靠度估计值为0.916 4,对应的测量不确定度计算结果为0.004 1,80%包含概率的不确定度上下限分别为0.921 5、0.910 9,则MCM测量不确定度相对区间宽度WM为
可以看出,利用MCM方法得到的测量不确定度评定结果相较于GUM法更小,相对区间宽度更小。由此认为,MCM方法相较于GUM方法有着更好的评估精度。同时MCM法利用仿真抽样,建模过程相对GUM法而言更为简单。但同时也应考虑加速退化试验中测量不确定度来源分析相对简单,且受试验条件、试验成本限制,计算结果会存在一定的误差,后续尚需根据实际需求进行完善。
4 结 论
1) 结合加速退化试验的建模与统计分析过程,引入测量科学领域中测量不确定度的概念,基于维纳过程模型和Peck模型构建了加速退化试验测量不确定度的分析框架,为加速退化试验结果的评价提供了更加科学准确的参考。
2) 结合加速退化试验性能测量和数据处理流程,分别基于GUM与MCM这2种测量不确定度分析理论,提出了加速退化试验的测量不确定度评定方法,并对测量不确定度的来源与传播效应进行了讨论,为加速退化试验中测量不确定度的评价提供了分析思路。
3) 以空间用高分子传感器的加速退化试验数据为案例,给出了传感器可靠性评估的测量不确定度评定结果,并对论文所提的2种方法进行比较。
