航天器太阳翼在轨挠性振动测量中的无依托敏感技术
2023-06-27郎燕梁鹤袁利张锦江郭朝礼张国琪尹涛
郎燕,梁鹤,袁利,张锦江,3,郭朝礼,张国琪,3,尹涛
1.北京控制工程研究所,北京 100094
2.中国空间技术研究院,北京 100094
3.空间智能控制技术重点实验室,北京 100094
随着近地空间任务越来越复杂、深空探测任务探索范围越来越远,对携带了大面积柔性太阳翼、大尺度柔性天线及桁架结构、大型机械臂等挠性部件的大挠性航天器需求越来越大。其结构动力学具有模态阶次高且密集、频率低、阻尼特性复杂等特点,对航天器姿态和轨道控制性能和稳定性均产生不利影响[1-2]。由于地面上很难对此类部件的在轨动力学进行准确建模,故通过在轨测量和辨识获取高精度的结构模态参数是实现大挠性航天器高性能、强鲁棒控制的重要技术途径[3],陀螺、加速度计、应变片、光学相机等是常用的振动测量方式[4-6]。1993—1997年间,美国NASA陆续对哈勃望远镜[6-7]、和平号空间站[8]、国际空间站[9]开展了多达几十次在轨模态参数辨识试验;1995年和2006年,日本分别对工程试验卫星ETS-VI和ETS-VIII开展了多次在轨模态参数辨识试验[10-11],极大地推动了在轨模态辨识技术的发展。但美国和日本当时安装在挠性结构上的加速度计、应变片等是有线敏感器,长距离的线缆束在大型活动部件上铺设复杂且不可靠,容易对部件的运动产生不利影响,同时也带来明显的附加重量且一定程度上改变其固有特性,因此发展无依托敏感技术愈加迫切。无依托敏感技术是指不依赖于传统的线缆方式实现供电和通信的敏感器技术,自身具备从周围工作环境中获取能量并转换为电能进行供电、通过无线网络进行通信的能力[12-20]。
中国空间站首次使用了大型桁架式、可展收的柔性太阳翼,为验证太阳翼动力学模型的准确性,天和核心舱、问天实验舱分别于2021年5月、2022年7月期间在轨实施了太阳翼挠性测量与辨识试验,两舱各有一个太阳翼在4个角点处安装了4个自供电无线加速度计来测量太阳翼的振动加速度响应[21],如图1所示。这是中国首次针对大挠性太阳翼在轨开展模态参数辨识试验,也是首次将无依托敏感技术应用于航天器振动测量。相对传统有线缆敏感器,无依托敏感器要具备能源自给自足、大范围无线通信、轻小型化设计、低功耗休眠、高速率采集、自主温控、多无线节点间数据交互、延时不确定下的时间同步等功能,这些需求要针对任务目标和特点统筹设计。在借鉴国内外相关研究成果的基础上,中国空间站在多个自供电加速度计形成的无线振动测量网络方面逐步形成了具有自身特点的无依托敏感技术,圆满完成了中国首次大型柔性太阳翼的模态参数测量与辨识任务。
1 航天器无依托敏感技术需求
1.1 振动测量任务需求
通过对航天器挠性结构施加特定频谱的主动激振信号或利用航天器大角度姿态机动、轨道控制、进出阴影区等被动激振方式,对挠性结构振动过程进行测量,从而辨识出挠性结构的频率、振型、阻尼等动力学参数,用于修正地面模型。
1.2 无依托敏感器能力需求
1)自供电、自充电能力
对航天器挠性结构特性的定期测量和评估,要求无依托敏感器在生存能力上必须具备自治性,即通过能量存储单元实现自供电;在生存长久性上必须有高效的能量转换利用,即通过光电转换模块实现自充电。不考虑充电能力,能量存储单元应具备支持敏感器在全轨道周期下连续测量时间>5 h的能力。自充电模块应保证所提供的充电电流大于敏感器测量单元和温控单元在极限工况下的负载电流。
2)稳定的大数据量更新输出
根据被测对象的主要频率分布确定待测振动信号频率范围,并根据香农采样定理确定采集系统的数据更新率。一般为避免频率泄漏问题,敏感器输出数据更新率应为被测振动信号最高频率的10倍以上。无线网络固有的时延不确定、丢包等问题对高可靠的数据采样率需求带来困难。
3)高精度时间同步
模态振动类型是通过对同一时刻不同位置处多个测点的测量综合判断的,其准确辨识要求所有测点信息必须严格同拍,即多个无依托敏感器之间的时间系统必须精准同步。挠性结构的各阶模态对应的振动频率越高,说明动态性能越强,也要求同一时刻下无依托敏感器之间的时间偏差越小。以一般无线测量网络来说,最大时延>500 ms,时延在几毫秒到几百毫秒范围波动,且往返时延不对称,需要针对这些特征设计高精度时间校准策略。对中国空间站太阳翼挠性参数辨识,由于主模态频率较低且测量数据更新率为40 Hz,故要求校时偏差应<20 ms即可。
4)数据缓存和代传能力
准确的模态参数辨识要求振动测量期间采集的信号是完整、连续、可精确表征实际信号状态的。太阳翼、柔性天线、机械臂在转动过程中可能会使敏感器的通信天线被局部或全部遮挡,导致无线通讯短时或长期中断。因此无依托敏感器需具备本地数据缓存能力,各节点之间还需具备自动组网、数据代传能力,实现采集单元端获取数据的有序、完整、无丢包、无重包目标。
5)低功耗休眠能力
“自供电”带来的局限性是无依托敏感器无法真正地受控断电,且能量存储单元容量及寿命有限。比如在地面发射场完成测试且最后一次充满电到航天器发射还有一段空闲期,需具备低功耗休眠能力以最大程度节省电量。另外在轨飞行过程中,非测量期间也需要低功耗省电运行。因此必须根据任务需求设计节能策略,进行动态能耗管理,延长有效的工作时长。
2 无依托敏感技术的核心能力设计
要实现1.2节所述的无依托敏感器能力需求,其基本组成设计如图2所示,应包括太阳能收集及充电单元、能量存储单元、测量敏感单元、数据采集与处理单元、FLASH存储区、热控单元和无线通信单元7部分。太阳能收集及充电单元可由太阳电池片完成光电转换功能,并通过专用充电芯片向能量存储单元注入电能。能量存储单元通常为超级电容、电池等,为敏感器的正常工作提供电能。测量敏感单元为加速度计或其他测量载荷。信号处理、电源管理与热控管理单元是控制核心,负责实现对外通讯、电源管理、热控管理、数据采集与处理、模式管理等功能,通常为由模块化高速处理器,应具备低功耗休眠模式。FLASH存储区具备掉电存储功能,用于保存重要参数。热控单元由加热片、温度测点等组成,为低温环境下正常工作提供保障。无线通信单元包括无线收发器、无线通信天线等。
2.1 自供电技术
中国空间站太阳翼振动测量使用的自供电加速度计选用了可适应-40~+85 ℃环境温度的宽温锂电池作为能量存储单元。全轨道周期下,加速度计在阴影区工作时的负载电流最大(环境温度低,温控单元开启),按照700 mA计算,要满足不充电条件下连续测量时间>5 h的指标要求,则锂电池容量应>3 500 mA。实际选用的锂电池放电电压范围为4.2 V(满电)~2.5 V(空),25 ℃下的标称容量为4 000 mA·h,最大连续放电电流8 A(2C rate),可以满足最大负载及连续工作时间要求。
2.2 自充电技术
仅依靠锂电池无法实现能量再生,因此敏感器外表面布置了三结砷化镓太阳电池片用于太阳光收集和光电转换,能量转化效率>30%,太空中垂直光照下的平均输出电流范围为760 mA,在-90~+100 ℃温度范围内通过多片串联方式可向后端锂电池充电单元提供>4.2 V的输出电压。
锂电池充电单元负责将三结砷化镓太阳电池片转换的电能提供到后端的锂电池中进行存储,要保证其输入特性与能量收集单元的输出特性兼容,输出特性与能量存储单元的输入特性兼容,如图3所示。
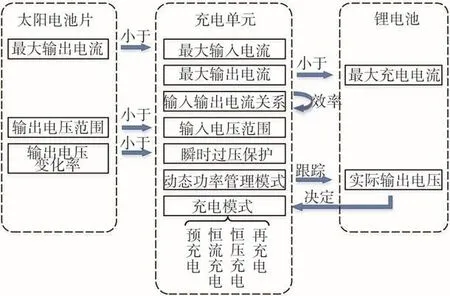
图3 充电单元设计要素Fig.3 Charger design elements
空间站自供电加速度计在待机、加速度计工作、加热模式下的工作电流分别为25 mA、560 mA、450 mA。阳照区内通过被动热控设计可保证不开加热片,阴影区内敏感组件工作产生的热耗等同于锂电池主动加热效果,因此主动加热仅在阴影区下敏感组件不工作时开启。以一个轨道周期90 min为例,阳照、阴影区比例为5∶4。
式中:Eout为消耗能量;Iacc和Tacc分别为加速度计工作电流和工作时长;Iheat和Theat分别为加热电流和加热时长,Iacc和Iheat不同时>0 mA;Ein为充电能量;Isun为充电电流(760 mA);Tsun为充电时长(50 min);θ为太阳与电池片法线夹角。根据式(1)和式(2),能量收支平衡下且不同太阳入射角下加速度计最大工作时长统计见表1。
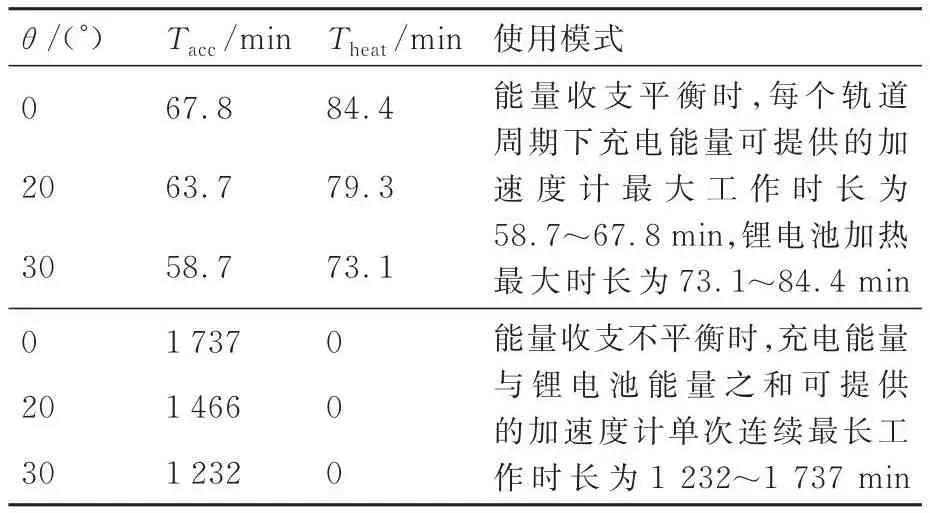
表1 无线加速度计工作模式Table 1 Work modes of wireless accelerometer
如果锂电池电量可补充提供90 min轨道周期内光电转换不足的部分,则
式中:Ebattery为锂电池电量;N为轨道周期倍数。
根据式(3)可得能量收支不平衡模式下、不同太阳入射角下的加速度计最大工作时长统计如表1所示。可见,能量收支平衡模式适用于短期的周期性测量;能量收支不平衡模式适用于单次长期测量。可根据任务需求合理选择。
2.3 多无依托敏感器间数据代传技术
无依托敏感器作为主动端(STA)通过无线接入点(AP)连入采集系统网络中。无线信号的强弱与STA、AP相对位置有关,如果某个STA与AP之间的无线链路中断,则该节点的测量信息无法被采集到。如图1所示,当空间站太阳翼阵面法线指向节点舱方向时,加速度计天线与接入点AP天线中心基本呈90°,这时加速度计1受太阳翼阵面遮挡最严重而无法与接入点AP建立连接。
若加速度计1能通过其他与AP保持正常连接的STA节点(如加速度计3)进行中继代传数据,则可大大提高无线采集的可靠性。这就要求无依托敏感器应兼容STA与AP模式,当周期性检测到与无线接入点之间的连接断开超过一定时长时,则自主切换为AP模式,等待其他STA在巡检时接入。为提高代传效率,基于配对原则对加速度计两两进行IP绑定。即遍历太阳翼0°~360°转角下4个加速度计接收接入点AP无线信号的覆盖情况,选择接收AP信号始终良好的加速度计与部分工况下接收AP信号较弱的加速度计进行配对,例如加速度计1与3配对,加速度计2与4配对,只有配对的加速度计间互相代传数据。切换策略如图4所示。
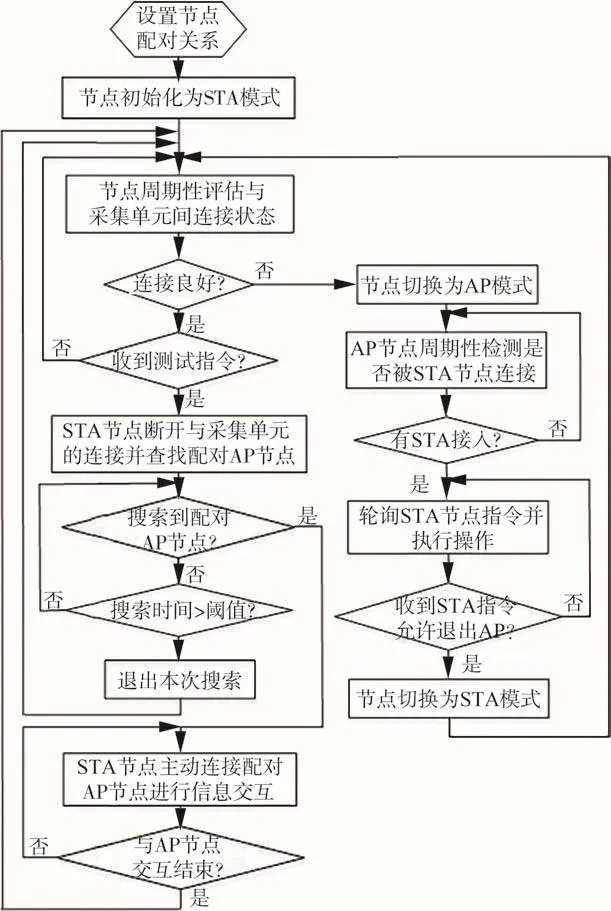
图4 无线加速度计STA与AP切换策略Fig.4 Switching strategy between wireless node STA and AP
2.4 多缓冲区采集技术
振动测量要求试验期间所有测量数据必须有序、连续且完整。由于无线时延的不确定性和无线信号易受干扰,为避免频繁丢包、重包,采集单元与无依托敏感器之间采用主从应答式通信,采集单元周期性发送采集指令,敏感器收到后发送2次采集指令之间的测量数据,如图5所示。

图5 采集单元与无依托敏感器间的采集机制Fig.5 Acquisition mechanism between acquisition unit and wireless sensor
1)两级采集频率设计
敏感器以较高频率(测量周期Ts)输出测量数据,输出的单包数据暂存于自身缓冲区中,多个单包数据在缓冲区内打包为大包数据发送。采集单元以较低频率(通讯周期Tc)采集无依托敏感器的大包数据。Tc和Ts的设计原则为:Tc大于最大通讯往返时延Tdmax、Tc满足任务实时性需求、Ts根据测量更新频率确定、Tc为Ts整数倍。
2)多区缓存设计
设计读、写2个循环队列,分别对应写操作(测量)和读操作(通讯),2个队列共享缓冲区,总缓冲区个数Nbuff为偶数,每个缓冲区读写互斥。通过约束读、写指针起始位置,使得同一时刻写队列、读队列中各有Nbuff/2个缓冲区,且读指针和写指针间隔Nbuff/2-1个缓冲区,二者间隔的缓冲区数量越多则能容忍的无线时延越大。
如图6所示,以读、写操作均为6缓冲区循环队列为例,每个队列的缓冲区按照A~F顺序排列。写操作以测量周期Ts向写队列的首个写缓冲区写入单包测量数据,待存满Na(=Tc/Ts)包后,该缓冲区转换为只读模式插入读队列的对应位置等待被读取,同时写指针移动至下一个写缓冲区开始新的Na包测量数据写入。无依托敏感器在每个通讯周期Tc到来后查询采集单元发送的采集指令,查到后从读指针指向的读缓冲区一次读取Na包测量数据发送给采集单元,该缓冲区转换为只写模式重新插入写队列的对应位置,同时读指针移动至下一个读缓冲区等待新的采集指令到来。该设计可以容忍无线采集指令发送时延Tds在0~2Tc内任意波动的情况,通过读写指针之间缓冲区间隔的动态变化保证写指针和读指针不同时位于同一缓冲区。当通讯时延突然增大导致未收到采集指令时,写指针下移而读指针不动避免丢包;当通讯时延突然减小导致一次写操作过程中收到2次采集指令,则读指针移动2次,避免了由于采集指令相对早到导致的发送重复包问题。
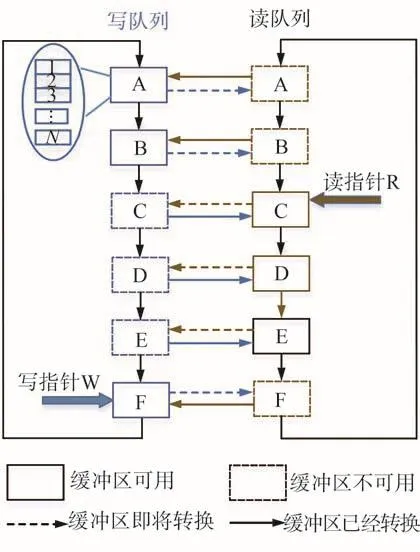
图6 两级频率多区缓存采集机制Fig.6 Two frequencies and multi caches mechanism
2.5 多无依托敏感器间时间同步技术
对于无线网络,通信时延抖动的不确定,采集单元同一时刻向多个无依托敏感器发送校时指令,各节点收到指令的时刻存在一定偏差,各敏感器之间的时间差就是时延抖动量。校时算法由采集单元实现,依次串行对每个加速度计执行一次,算法流程如图7所示,步骤如下
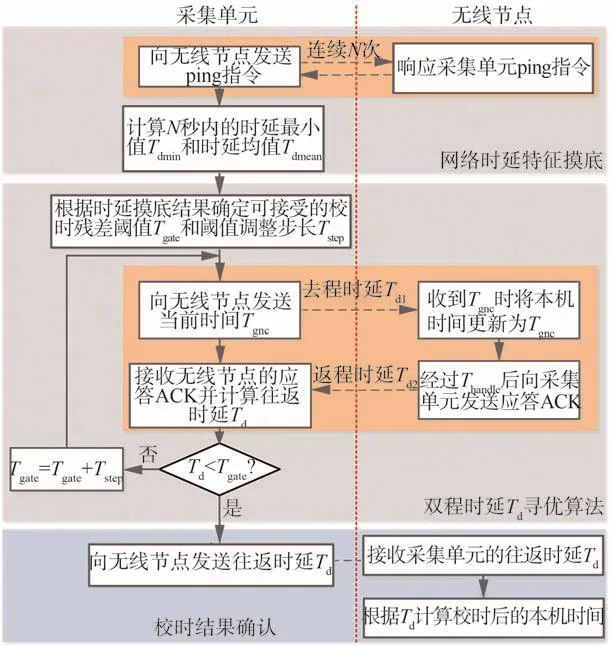
图7 无线自主校时算法流程Fig.7 Flow of wireless autonomous time calibration
1)无线链路时延分布摸底
采集单元以1 s间隔向某敏感器连续发送N次ping指令,测量采集单元与该敏感器间的往返双程链路时延,可得Ns内时延最小值Tdmin。根据允许的校时误差Terr_limt(20 ms)确定时延阈值Td_limt,该阈值越小则需要多次校时才能找到校时时延小于阈值的一次,即耗时越多。初始设定Terr_limt和Tdmin之中的小值作为Td_limt。
2)时延自主寻优补偿
不考虑无线链路时延,采集单元向无依托敏感器发送当前时间Tgnc,无依托敏感器以中断方式接收后保存Tgnc,并更新本机时间Tacc_cur=Tgnc,这是采集单元对无依托敏感器的绝对校时。无依托敏感器经过软件处理时间Thandle后,向采集单元发送应答消息ACK。采集单元在Tgnc_ack收到应答消息ACK后计算校时往返时延Td(即Tgnc_ack-Tgnc),这是采集单元对本次绝对校时的时延测量。“绝对校时+时延测量”定义为一次完整的校时操作。若本次测量的Td<Td_limt则绝对校时结束,否则再次执行上述校时操作直到满足。实际会根据总的校时时长约束调整Td_limt,在时间花费和校时误差之间折衷。
3)时延常偏补偿
采集单元向无依托敏感器发送本次绝对校时对应的往返时延Td,敏感器收到后根据式(4)计算并更新本机时间。根据地面多次测试结果,采集单元至敏感器的去程时延Tds和敏感器至采集单元的返程时延Tdr不对称,δT常值偏差用于补偿二者间差值,多次测试的平均值为4 ms。
式中:Δt为收到时延Td与收到Tgnc的时刻差。
地面实验室环境下的无线往返时延在10~300 ms间波动,采集单元对加速度计执行完自主校时操作后,地面设备通过有线串口同时锁存采集单元和加速度计本机时间,二者之差即为校时误差。如图8所示,10次自主校时测试的误差散布<5 ms,进一步经过常偏补偿后误差散布在±1 ms以内。
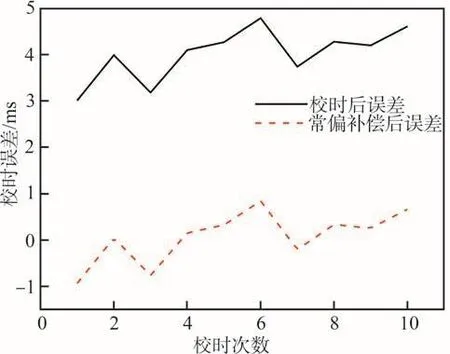
图8 10次校时误差及常偏补偿后误差Fig.8 Correction errors and errors after compensations of ten calibrations
2.6 自主休眠唤醒技术
对于航天器挠性振动测量,一般在健康监测、定期巡检时开展,非测量任务期间保持低功耗模式。选用的处理器需支持休眠等低功耗模式,通常是关闭绝大部分负载、仅保留计数器功能。无依托敏感器在收到采集单元的休眠指令后切换为休眠状态,设计休眠时间参数触发和事件触发2种退出方式。事件触发可以结合航天器在挠性测量任务前的常规操作来设计,比如太阳翼振动测量前要设置太阳翼转动到期望转角处,机械臂振动测量前要设置机械臂运动到特定构型下,通过检测加速度值的大小作为是否真正退出休眠的判定依据。尤其在巡检计划发生调整时,通过事件触发判断可以提高无依托敏感器的自主管理能力,最大程度实现节能。
如图9所示,无依托敏感器在休眠设置T0时刻收到采集单元发送的休眠指令后进入低功耗模式,当计数器从触发休眠期ΔT1开始倒计时减为0后,在退出窗口1时间段内持续进行加速度值判断,若判定结果符合预期退出条件,则转入正常工作模式;若判定不满足退出条件,则继续休眠进入休眠期ΔT2,以此类推。

图9 时间和事件相结合的休眠唤醒设计Fig.9 Wake-up design combined with time and event
3 在轨验证情况
基于第2节所述的无依托敏感器关键技术及策略,对中国空间站上的自供电无线加速度计各项实际性能结果进行了总结。
3.1 低功耗休眠能力评估
4个无线加速度计在地面最后一次测试完成后执行了锂电池充电操作,并于发射前5天设置进入低功耗休眠状态。根据2.6节方案,3个休眠退出窗口分别对应3个火箭起飞窗口,通过参数注入提前预置于内部FLASH中。每个窗口跨度2 h,加速度计在窗口内将自主进行三轴加速度值监测,当判断满足起飞条件后将转入发射段计时,计时到后则开始主动搜索并连接舱外Wi-Fi接入点,否则保持W-iFi通讯静默状态直至本窗口结束再次进入休眠。实际任务中,核心舱按照第1窗口的标称时刻准时发射,入轨后约2 h舱外Wi-Fi接入点开启后,在轨实时监测到4个无线加速度计均联网成功,数据正常下行。结合下行数据中的4个锂电池初始电量(分别为68%、71%、66%、64%)和起飞前的耗电量预估可以判断,4个加速度计按照预定程序执行了休眠操作并正常唤醒,基于时间触发和事件触发相结合的唤醒策略有效。
3.2 自供电能力评估
初始入轨后,无线加速度计在90 min的运行轨道上保持待机状态,平均负载电流30 mA,每个轨道周期下锂电池的净充入电量约2 W·h,平均充电量约为电池容量的12%,在容量剩余64%以上的情况下,约4.5 h后可充电至90%以上,约6 h后锂电池电量达到100%,停止充电,维持满电工作。充电情况如表2所示。
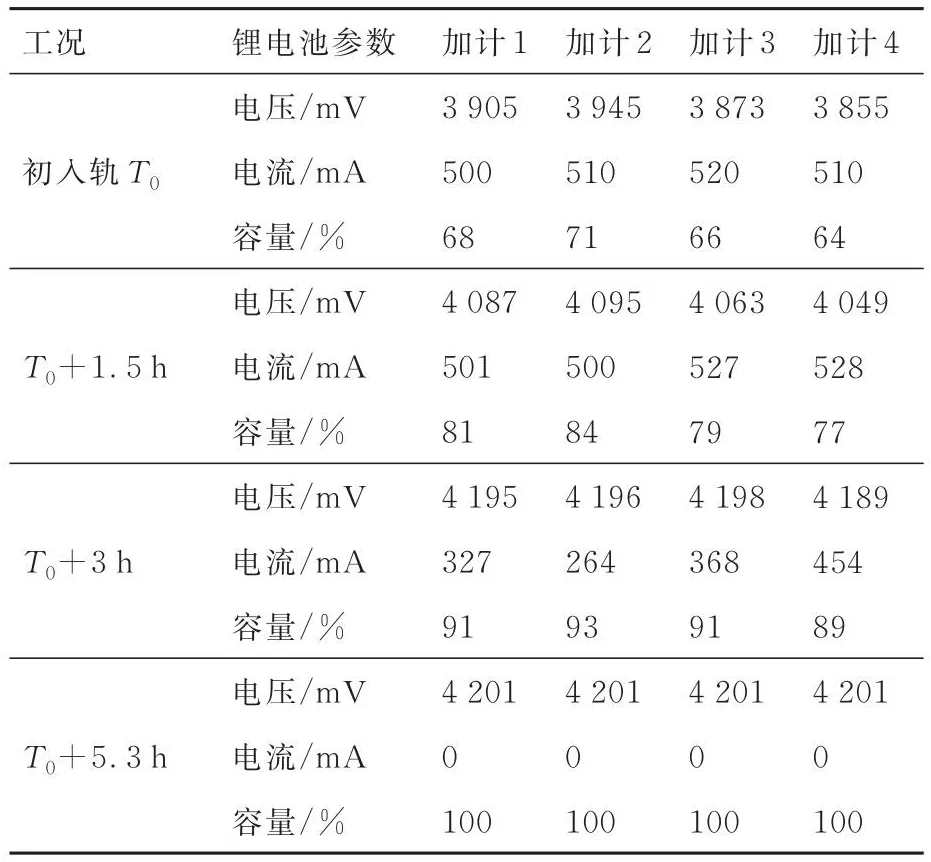
表2 入轨后自供电测试情况Table 2 On-orbit self-powered test
4个无线加速度计入轨后约8 h内的锂电池电压、电流曲线如图10所示。
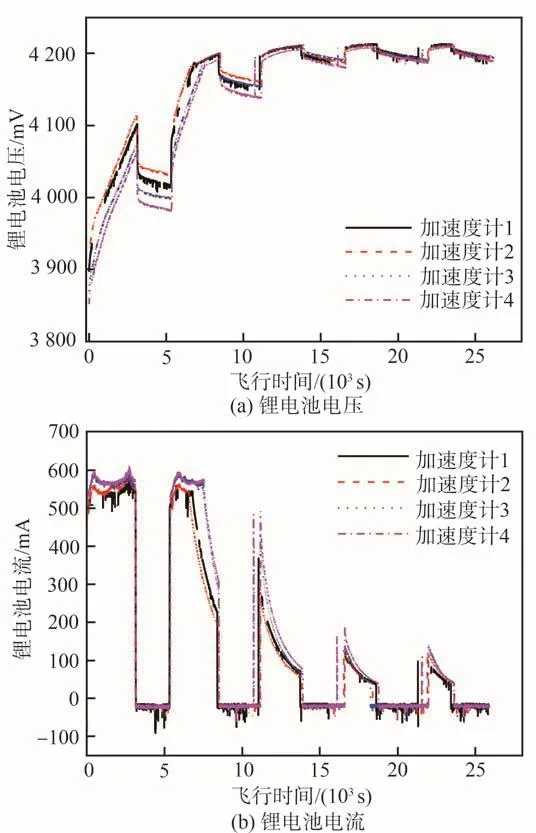
图10 入轨初期锂电池充电过程电压和电流曲线Fig.10 Lithium battery voltage and current curves of charging on-orbit
阳照区电流为正表明在向锂电池充电,阴影区电流为负表明锂电池为放电状态。前2个轨道周期以550 mA恒流充电,从第3个周期起锂电池电压基本达到4.2 V后进入恒压充电,电量达到100%后若再次低于充电阈值则进行涓流充电。可见,加速度计的自供电性能良好。
3.3 能量平衡能力评估
核心舱在轨开展了连续7 h的太阳翼热颤振监视,这是对加速度计连续工作状态下能量平衡、温控能力的检验。热颤振主要发生在进影、出影过程中,故主要采集了5次进出影期间的加速度计数据。根据图11,4个锂电池均从满电(98%以上电量)开始工作,约3 h后电量明显下降至93%~88%之间,且在之后4 h内基本维持,说明此时能量收支已基本达到平衡。

图11 热颤振测试期间锂电池电压和电量曲线Fig.11 Lithium battery voltage and power curves during thermal flutter
3.4 同步校时能力评估
核心舱上的4个无线加速度计节点在开展振动测量任务前都会首先进行自主同步校时。选取了10次自主校时结果进行统计。
每次校时前均会进行10次往返时延摸底测试,图12给出10次校时后得到的100次往返时延在6~450 ms间波动。如图13所示,取10次往返时延计算1次平均值,则10次的均值在69~193 ms之间,10次的最小值在6~35 ms之间。根据2.5节描述,校时算法中取校时允许误差Terr_limt和时延最小值Tdmin中的小值作为校时成功的阈值Td_limt,因此实际在轨自主校时的误差一定<20 ms。
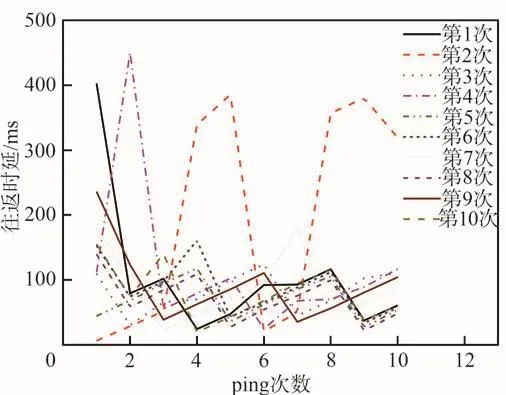
图12 10次校时的往返时延波动情况Fig.12 Round trip delay fluctuations of ten calibrations
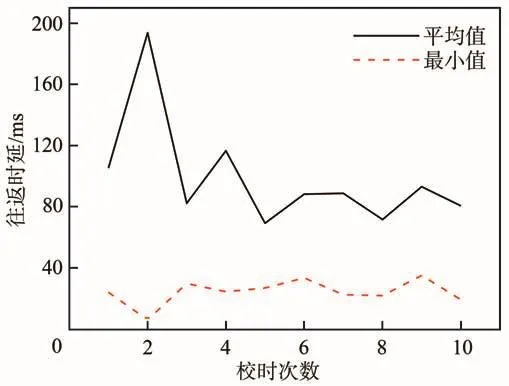
图13 10次校时的往返时延平均值和最小值Fig.13 Average and minimum round trip delay of ten calibrations
3.5 高可靠数据采集能力评估
核心舱在轨道控制、大角度调姿、太阳翼伺服控制、进出影热颤振、货运飞船对接等主线任务中共开展了十余次太阳翼振动监测,考核了太阳翼在上述典型任务工况中承受被动激励下的振动特性。此外,在控制开环情况下利用控制力矩陀螺对太阳翼进行伪随机扫频、针对理论特征频率的脉冲激励等主动激振方式,开展了15次太阳翼专项激励测试,对我国首次在轨应用的柔性太阳翼模态参数进行了全面验证。4个无线加速度计全程参与了上述28个工况的测试,向地面下传了大量测试数据,不仅在测量能力上做到了全天时在轨可用,而且40 Hz的数据更新率、10 ms以内的时间同步精度、无线时延波动下的测量数据有序连续完整性确保了对太阳翼振动过程的精确复现。同时利用本地数据缓存和数据代传技术有效解决了太阳翼特定转角下的无线信号盲区问题,保证所有节点的测量数据均可获取,实现了无线采集网络在任意时刻的全局完整性。
以太阳翼法线与舱体滚动轴夹角保持在45°下的测试工况为例,利用控制力矩陀螺对舱体滚动轴实施了持续时间4.2 s的主动脉冲式激振,之后控制力矩陀螺和推力器均无动作,从开始激振之后的约190 s内核心舱始终处于控制开环的停控状态,收集了持续约185 s的太阳翼自由震荡过程数据。图14为4个无线加速度计从激振准备、激振过程到自由震荡衰减结束后140 s内的加速度测量值,地面考核试验给出的加速度计的测量精度为2×10-4g,各加速度计的测量坐标系定义见图1。图15为同时段根据安装在舱体内部的陀螺数据计算出的核心舱本体系三轴角速度测量值,x、y、z分别为滚动轴、俯仰轴和偏航轴。
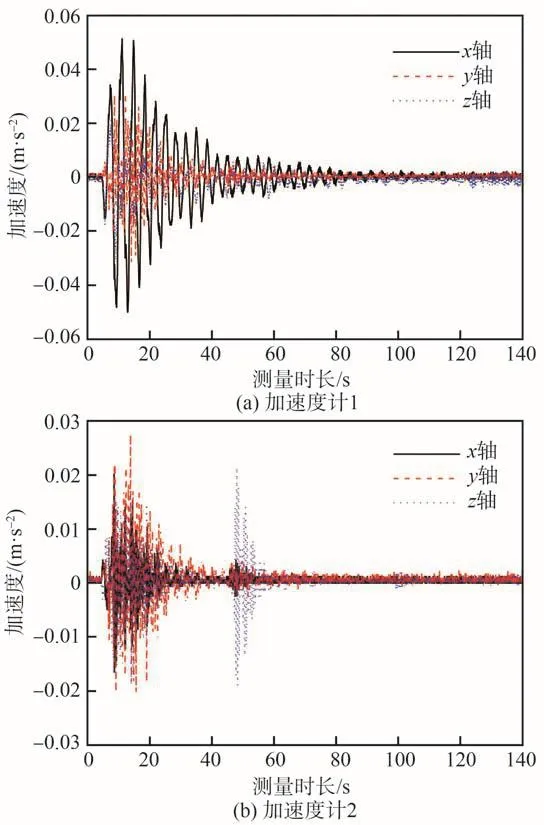
图14 4个无线加速度计测量曲线Fig.14 Measurement curves of four wireless accelerometers
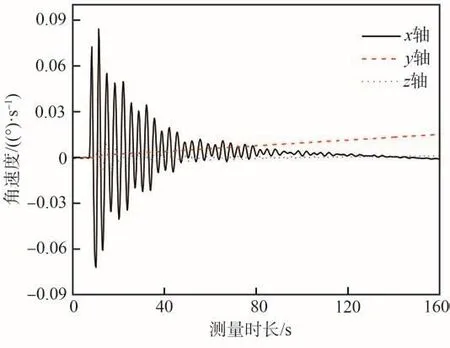
图15 根据陀螺测量值计算的本体角速度曲线Fig.15 Angular velocity curves from gyro measurements
对上述加速度计和陀螺的测量值分别进行FFT分析,剔除伪模态后的主要模态特征频率如表3所示。

表3 225°转角下主动脉冲激振下获取的特征频率Table 3 Frequencies obtained under active pulse excitation at 225° rotation angleHz
根据图1可知,加速度计1和4布局在太阳翼的远端,加速度计2和3布局在太阳翼的近端,主动激振过程中太阳翼远端比近端振动剧烈,因此加速度计1和4的振幅更大且测量信号频率更丰富,FFT分析获得的特征频率更多,通过表3的结果也印证了这一结论,加速度计1和4获取的频率基本一致,加速度计2和3获取的频率一致。且近端加速度计辨识到的频率均在远端加速度计辨识频率的范围内,证明4个加速度计的测量一致性好。由于陀螺安装在核心舱刚性结构上,可测的挠性频率数量少于加速度计,从陀螺辨识出的3个频率看,均在加速度计辨识结果范围内,这也印证了加速度计测量数据的完整可信,精度满足任务要求。
4 结论
针对无依托敏感技术在空间探测任务中的应用需求,以空间站太阳翼挠性振动测量任务为牵引和实践,梳理了无依托敏感器应具备的核心能力,即自供电自充电、无依托敏感器间数据代传、高可靠数据采集、高精度时间同步和自主休眠唤醒等。逐一讨论了上述能力的实现方案,并给出了空间站太阳翼振动测量无依托敏感器对上述能力的实际验证结果。在轨测试结果表明所提出的无依托敏感技术设计策略合理、有效,为我国首次在轨柔性太阳翼动力学参数辨识任务的圆满完成做出了重要贡献。