多源传感监测线性退化设备数模联动的剩余寿命预测方法
2023-06-27李天梅司小胜张建勋
李天梅,司小胜,张建勋
火箭军工程大学 智剑实验室,西安 710025
随着先进传感和状态监测技术的发展,获取能够反映设备健康状态的性能退化过程监测数据已成为可能。因此,若能根据设备状态监测信息,建立其性能退化过程的时变演化模型,据此预测设备的剩余寿命,然后根据预测信息对设备实施及时精准的预测性维护、提前规划维护资源配置,对于切实保障复杂设备的运行安全性、可靠性与经济性具有重要意义[1-3]。
在过去十余年,数据驱动的随机退化设备剩余寿命预测技术已成为国内外可靠性工程、工业工程及自动化技术领域的研究前沿[4],得到了广泛关注和蓬勃发展[5-7]。其基本思路为[6,8]:基于设备运行监测数据,通过拟合设备性能退化变量演化规律并外推到失效阈值,或建立监测数据与失效时间的映射关系,以实现剩余寿命预测。虽然这类方法得到了长足的发展和广泛的应用,但现有研究中一个重要的潜在假设是设备的健康状态由单个性能退化变量直接反映,其监测数据可通过单个传感器获取。单变量假设条件给设备性能退化过程建模及剩余寿命预测提供了很大的便利和灵活性,由此促使基于单变量性能退化建模的剩余寿命预测理论和方法得到了极大的发展[6,8-10],但单一传感器获取的该性能退化变量监测数据往往难以全面、充分反映设备潜在健康状态并表征其随机演化过程,对于复杂退化设备而言尤其如此。随着工业4.0、物联网等技术的快速兴起与普及,各式传感器犹如一张庞大的神经网络密布在复杂设备内部,实时感知装备健康状态,获取了大量的多源传感监测数据。这些多源传感监测数据提供了丰富的设备健康状态及剩余寿命信息,但由于多源信号差异大、采样策略形式多、信息之间相互耦合,导致各个传感器获取的数据呈现不同的统计特性,只能部分地反映设备健康状态。因此,如何有效融合随机退化设备的多源传感监测数据是实现这类设备剩余寿命精准预测的关键。现有的多源传感数据融合方法按融合机制主要分为数据层融合、特征层融合、决策层融合3 类[11]。值得注意的是,特征层融合和决策层融合的效果主要依赖原始数据的质量及数据分析处理的方式,因此在退化数据建模及剩余寿命预测领域更多地关注数据层融合方法。当前,针对多源传感监测的随机退化设备,在数据层融合多源传感数据的实现方法主要有两大类。
第1 类是基于神经网络的方法。这类方法将各个传感器的数据直接作为神经网络的输入,通过神经网络学习机制建立多源传感数据与设备剩余寿命之间的映射关系,由此实现剩余寿命预测。例如,浅层神经网络[12-13]、深度神经网络[14-16]等被用于多源传感器数据融合及剩余寿命预测。然而,这类方法在表现形式上类似“黑箱”,难以输出设备健康状态退化过程的可视化形式,且监测数据与剩余寿命之间的关系难以显式表示。此外,剩余寿命预测是根据当前得到的监测信息预测设备将来的失效事件,而设备性能退化在预测区间内受到环境、负载等多重随机因素影响,导致剩余寿命预测结果不可避免具有不确定性[8]。实际上,预测结果具有不确定性是学术界的共识[17],也是当今时代的特征。然而,基于神经网络的方法只能得到确定性的剩余寿命预测值,难以量化预测的不确定性,无法为后续的维护决策提供参考和支撑。Li 等[18]针对基于深度学习的剩余寿命预测方法在量化预测不确定性上的不足,基于Bayesian 深度学习技术提出了一种能够同时表征认知不确定性(模型不确定性)和偶然不确定性(测量随机性)的剩余寿命预测新方法,并验证了该方法在降低剩余寿命预测不确定性方面的有效性。然而,该方法在剩余寿命预测时主要通过Bayesian 深度学习网络建立监测数据和剩余寿命之间映射关系实现端到端的预测,存在前述难以输出设备健康状态退化过程的可视化形式且监测数据与剩余寿命之间的关系难以显式表示的问题。
第2 类是构建一维复合健康指标的方法。这种方法的主要思路是在进行退化建模之前,首先根据多源传感监测数据之间的关系,通过优化、加权、融合滤波等方式,将多维数据投影变换到一维数据上来,提取一个单变量复合健康指标,再应用已有针对单变量的方法对此一维复合健康指标数据进行建模,据此预测设备剩余寿命。此类方法的优点在于将多源传感数据下的剩余寿命预测问题转化为基于一维复合健康指标的剩余寿命预测问题,现有非常丰富的单变量随机退化建模和剩余寿命预测方法可以直接应用。此外,通过这类方法可以构建一个可视化的设备性能退化过程,便于理解设备健康状态随时间的连续演变,这在工程应用中往往是迫切需要的。根据以上思路,在多源传感监测随机退化设备剩余寿命预测背景下,Liu 等[19-20]针对复合健康指标应当具有的单调性、趋势性、失效阈值方差最小等期望特性,构建适当的优化目标函数,先后提出了一系列多源传感监测数据加权融合构建复合健康指标的方法,并推广至多失效模式下多源信息融合的复合健康指标获取方法及融合参数推断方法[21],在此基础上采用单变量随机系数回归模型建模复合健康指标的演化轨迹以实现剩余寿命预测;Li 等[22]提出了一种基于神经网络的多源传感监测设备复合健康指标构建及剩余寿命预测方法,构建了综合单调性、凹凸性、失效阈值方差最小等期望特性的优化目标函数获取复合健康健康指标,在此基础上采用随机系数回归模型实现了剩余寿命预测。然而以上采用随机系数回归模型建模复合健康指标在表征时变不确定性上具有一定局限性。彭开香等[23-24]将深度置信网络应用于多源传感监测数据融合,提取一维复合健康指标,然后通过随机模型建模其演变过程实现剩余寿命预测;为改善构建的复合健康指标用于剩余寿命预测时的效果,Liu 和Huang[25]在复合健康指标的构建过程中考虑了采用随机模型建模复合健康指标时的模型拟合误差。进一步,Liu[26]、Yan[27]等将退化模型拟合复合健康指标的误差因素考虑到多源传感数据融合中,分别提出了基于信号质量优化及多失效模式下的多源传感监测设备复合健康指标构建方法。以上这些改进研究主要关注了拟合的效果,未考虑退化轨迹预测及剩余寿命预测效果,由此导致拟合效果的改善并不意味着预测效果的提升,且这些工作中构建复合健康指标的方法基本上是启发式的,而设备的复合健康指标是不可观测的虚拟指标,难以与某个实体的物理量具体对应。更为重要的是,复合健康指标构建的目的在于提高多源传感监测下随机退化设备剩余寿命预测的准确性,因此复合健康指标的构建与其时变演化规律建模及剩余寿命预测过程是相互关联的,但现有研究的主要思路是先构建复合健康指标,然后对其演变过程进行退化建模进而预测剩余寿命,在复合健康指标构建的过程中未考虑采用何种随机模型建模其演变趋势,从而将本质上相互关联的复合健康指标的构建过程和复合健康指标的建模、剩余寿命预测过程孤立地分别处理,由此难以保证构建的复合健康指标和所采用的模型相匹配,进而影响剩余寿命预测准确性的提高。最近,Song 和Liu[28]、任子强等[29]在改进上述多源传感监测数据融合及剩余寿命预测方法上做出了有益尝试,在多源传感监测设备复合健康指标构建的过程中通过将预测寿命与实际寿命的偏差最小化来确定多源传感器融合模型中参数,使得指标构建与寿命预测相关。然而,在复合健康指标构建的优化目标函数中,仅仅利用了寿命预测的期望值,未能考虑如何减少寿命预测的不确定性。文献[30]首次在大数据背景下提出了一种数模联动的随机退化设备剩余寿命预测问题的解决思路,即将数据驱动的设备复合健康指标构建与其退化建模及剩余寿命预测交互联动,形成闭环以克服现有研究中将以上两步孤立处理的不足,但仅给出了初步的研究思路,以说明实现深度学习和随机退化建模之间数模联动的可行性,对于数模联动机制对预测不确定量化、模型参数更新等问题的研究尚未全面深入开展。此外,对于随机退化设备,由于生产制造过程中设备个体差异性以及使用过程中外界应力不确定性的共同作用,设备失效阈值表现出一定的不确定性,即同类设备不同个体对应的失效阈值往往并不相同,呈现一定的随机性,因此将设备的失效阈值描述为随机变量以刻画其不确定性将更符合实际。然而针对多源传感监测的随机退化设备,通过多源传感器数据融合后得到的复合健康指标物理意义不明确,这时如何确定复合健康指标对应的失效阈值分布及其超参数将成为新的难题。
针对以上问题,本文在多源传感监测的线性随机退化设备剩余寿命预测背景下,提出一种考虑随机失效阈值的数模联动剩余寿命预测方法。首先,基于多源传感历史数据构建复合健康指标及据此考虑失效阈值随机性的随机退化建模进而预测寿命,构建综合寿命预测值与设备实际寿命的均方误差以及表征预测不确定性的寿命预测方差的优化目标函数,在此基础上形成复合健康指标提取与随机退化建模的反馈闭环,对多源传感器融合系数和复合健康指标对应的失效阈值所服从分布对应的超参数值进行反向优化调整。然后,针对多源传感监测的服役设备,根据数模联动复合健康指标构建方法,融合实际运行设备的多源传感监测数据以构建服役设备的复合健康指标,采用随机过程模型对其演变过程建模;为使得模型实时反映设备当前状况,采用Bayesian 方法对模型参数进行更新,在此基础上基于首达时间概念得到设备剩余寿命的概率分布、期望和方差。最后,基于航空发动机的多源传感监测数据,验证所提方法的有效性和优势。
1 数模联动的寿命预测离线训练
本节主要给出数模联动的多源传感监测线性随机退化设备寿命预测离线训练方法,其中“数”是指基于融合系数构建多源传感数据复合健康指标,“模”是指所构建复合健康指标时变演化过程随机退化建模,“联动”是指基于构建的优化目标函数实现多源融合系数向量、随机失效阈值均值和方差的联合优化求解,形成多源传感监测复合健康指标构建与随机退化建模及寿命预测的反馈闭环。
1.1 多源传感历史数据描述及预处理
针对多源传感监测的随机退化设备,假设有N个退化失效的同类随机退化设备,对于同一个随机退化设备共安装有S个传感器,且已知第i(1 ≤i≤N)个随机退化设备失效时间为,即实际寿命为。由此,这N个同类随机退化设备的实际失效时间构成了实际寿命的历史数据,表示为对于多源传感监测数据,令(t)表示第i个随机退化设备的第j(1 ≤j≤S)个传感器在t(t≥0)时刻采集到的原始监测值;假设S个传感器监测随机退化设备是同步的,且将第i个随机退化设备对应监测时刻表示为ti=[ti,0ti,1…ti,Ki],这里Ki为第i个随机退化设备的监测时间点的个数。为不失一般性,本文仅考虑随机退化设备监测时间间隔为等间隔且初始监测时刻ti,0=0 的情况,即Δt=ti,kti,k-1(k=1,2,…,Ki;i=1,2,…,N)。
基于以上描述,第i个随机退化设备的第j个传感器历史监测数据可以表示为具体地那么,第i个随机退化设备的多源传感历史监测数据可以表示为Ui∈RS×(Ki+1),具体有
考虑到不同传感器的监测数值往往量纲与数量级不同,直接处理不同量纲和数量级的数据容易导致部分传感器的数据被其他传感器数据淹没。为解决不同传感器监测数据量纲和数据取值范围不一致的问题,采用最大-最小归一化预处理,将多源传感数据归一化至[0,1],使得所有传感器的监测数据转换到同一尺度下,具体实现公式为
由此,归一化预处理后第i个随机退化设备的第j个传感器历史监测数据可以表示为具体地相应地,归一化后第i个随机退化设备的多源传感历史监测数据可以表示为Xi∈RS×(Ki+1),具体有
1.2 基于融合系数构建复合健康指标
基于多源传感监测数据,若能对其有效融合构建一维复合健康指标,将为所构建一维复合健康指标的退化过程建模带来极大的便利,现有丰富的各种单变量随机退化建模方法将有望直接应用。构建一维复合健康指标将使得多源传感监测随机退化设备的性能退化过程可视化,便于理解设备健康状态随时间的连续演变。因此本文主要考虑加权组合构建复合健康指标的思路。具体地,第i个随机退化设备在ti,k时刻的复合健康指标zi,k可以表示为
式中:wj为第j个传感器的融合系数;W=[w1w2…wS]T,为融合系数向量。需要说明的是,式(4)为通过多源传感监测数据的线性加权组合构建的融合函数。在工程实际中,也可以通过神经网络将多源传感监测数据融合为一个单变量复合健康指标,基于神经网络对任意函数的逼近能力,通过选择适当的激活函数和连接权重构造更为一般的融合函数。
基于式(4),可得到多源传感监测的随机退化设备各个监测时刻的复合健康指标。因此,可将第i个随机退化设备各个监测时刻的复合健康指标数据表示为zi=[zi,0zi,1…zi,Ki],对应监测时刻为ti=[ti,0ti,1…ti,Ki]。因此,所有N个多源传感监测的随机退化设备复合健康指标数据可表示为Z=[z1z2…zN],对应的实际寿命数据为至此,通过式(4)完成了多源传感监测随机退化设备复合健康指标的构建,该复合健康指标的数据将用于随机退化过程建模,以实现寿命预测。
1.3 复合健康指标随机退化过程建模及寿命预测
标准布朗运动驱动的线性随机过程模型在退化建模及剩余寿命预测领域得到了广泛的应用[6,8-10],本文主要考虑标准布朗运动驱动的线性Wiener 过程建模多源传感监测随机退化设备复合健康指标zi的时变演变过程。对于具有非线性趋势的退化过程,可以首先运用数据变换技术(如对数变换、时间尺度变换等[10]),预处理为近似线性趋势的数据后再应用标准布朗运动驱动的线性随机过程模型。在这种情况下,第i个随机退化设备复合健康指标的随机退化过程{Zi(t),t≥0}在t时刻的退化量Zi(t)可表示为
式中:B(t)为标准布朗运动,反映了退化过程时变随机性;θ为漂移系数,用以刻画复合健康指标的时变趋势特点;σ为扩散系数。进一步,令Θ=[θ σ2]表示随机退化模型式(5)的参数向量。
基于式(5),可对复合健康指标数据zi=[zi,0zi,1…zi,Ki]与其对应的监测时刻数据ti=[ti,0ti,1…ti,Ki]之间的关系进行建模,其中的模型参数Θ可以利用复合健康指标数据通过极大似然估计方法进行确定。根据退化模型式(5),基于标准布朗运动的增量独立性、高斯性及马氏性,可得复合健康指标数据zi=[zi,0zi,1…zi,Ki]的对数似然函数为
式中:Δt=ti,k-ti,k-1。
根据极大似然估计方法,使L(Θ)对Θ求偏导等于零并解方程,可得第i个随机退化设备复合健康指标随机退化模型参数Θ的极大似然估计的计算公式为
不失一般性,以具有增长趋势的复合健康指标为例,基于以上建立的随机退化过程{Zi(t),t≥0},通过首达时间的概念,第i个随机退化设备的寿命Ti可定义为
式中:ω为失效阈值。
由于生产制造过程中设备个体差异性以及使用过程中外界应力不确定性的共同作用,设备失效阈值表现出一定的不确定性,即同类设备不同个体对应的失效阈值往往并不相同,呈现一定的随机性,因此本文将设备的失效阈值ω描述为随机变量以刻画其不确定性。为此,假设ω为随机变量,且有ω~p(ω),其数学期望和方差分别记为
基于寿命的定义式(8)和估计的模型参数,给定失效阈值ω的条件下预测的第i个随机退化设备寿命的概率密度函数(Probability Density Function,PDF)可表示为对应的累积分布函数(Cumulative Distribution Function,CDF)为在此基础上,考虑ω为随机失效阈值且ω~p(ω) 时,则设备寿命的计算公式为
通过式(9)、式(10),得到了寿命Ti对应的和后,可以通过计算Ti的数学期望作为第i个随机退化设备寿命预测的点估计̂,而通过计算Ti的方差可以量化寿命预测结果的不确定性。具体地计算公式为
式中:E[ ·]为数学期望运算;var[ ·]为方差运算。
对于随机退化过程式(5)和首达时间寿命的定义式(8),当失效阈值为固定值时,根据文献[30],第i个随机退化设备寿命的条件PDF、CDF,以及条件期望和方差为
进一步,在式(15)、式(16)的基础上,考虑到失效阈值的随机性,可以得到预测的第i个随机退化设备寿命的数学期望和方差为
由式(17)、式(18)可见,考虑失效阈值随机性的多源传感监测随机退化设备寿命预测的数学期望和方差与分布p(ω)的具体形式无关,仅与有关。
由此,可以得到多源传感监测下N个随机退化设备寿命预测的点估计和方差,分别表示为和通过式(19)、式(20),可以发现均为融合系数W和超参数的函数。因此,若能基于构建合适的优化目标函数,将能通过优化方法来确定
1.4 复合健康指标构建与随机退化建模交互联动
前述第1.2、1.3 节中,复合健康指标构建、随机过程建模、寿命预测是孤立进行的,相互之间未形成联动、融合机制,构建的复合健康指标演变轨迹能否适应并匹配随机退化模型仍是问题。此外,第1.2、1.3 节复合健康指标构建和随机退化建模及寿命预测过程中,多源传感器融合系数W、复合健康指标对应的失效阈值ω所服从分布的超参数μω、都有待确定。因此,如何实现复合健康指标构建、随机退化建模、寿命预测的交互联动、交叉融合、自动匹配,是本文需要重点解决的问题。为解决这一难题,基于第1.2、1.3 节基于融合系数构建的复合健康指标及据此随机退化建模预测的寿命,建立综合寿命预测值与设备实际寿命的均方误差以及寿命预测方差的优化目标函数,在此基础上形成复合健康指标提取与随机退化建模的反馈闭环,对多源传感器融合系数W和复合健康指标对应的失效阈值ω所服从分布的超参数μω、进行反向优化调整确定,实现复合健康指标提取与随机退化建模的交互联动,达到复合健康指标与随机模型自动匹配的目的。具体过程及原理如图1 所示。
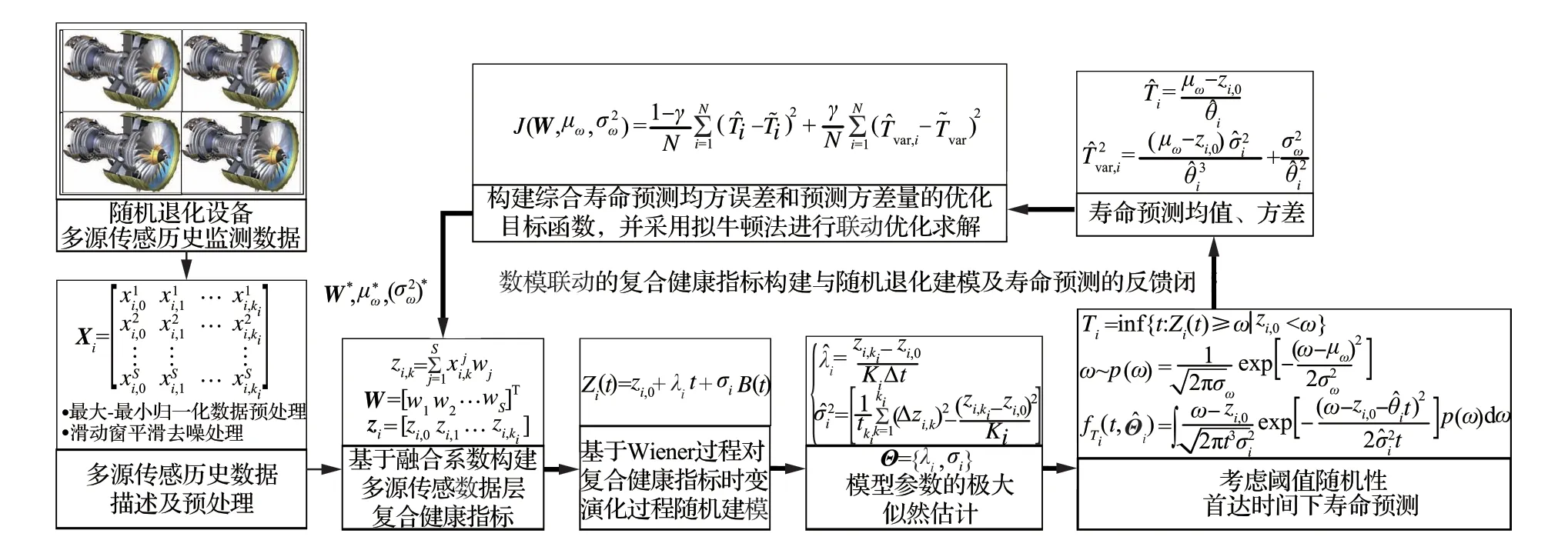
图1 数模联动的复合健康指标构建与随机退化建模及寿命预测原理Fig.1 Principle of data-model interactive feedback closed-loop between composite health index construction for stochastic degradation modeling and life prediction
如图1 所示,形成复合健康指标构建与随机退化建模及寿命预测的反馈闭环,实现两者交互联动的关键是构建以最小化寿命预测偏差及预测不确定性为核心的优化目标函数。考虑到预测得到的寿命与设备实际寿命不可避免存在误差,因此优化目标函数可以通过预测误差和表征预测不确定性的方差来构建,然后最小化该目标函数以实现寿命预测效果指导下的复合健康指标构建,同时实现其与随机退化建模过程的交互联动。为此,基于1.3 节得到的多源传感监测下N个随机退化设备寿命预测的点估计寿命预测方差以及对应的设备实际寿命构建表征预测效果的优化目标函数
根据式(7)~式(9)、式(14) ~式(16)可知,构建复合健康指标后,通过线性随机退化建模并计算其首达随机失效阈值ω的时间,可以得到式(15)中的寿命预测值及式(16)中的寿命预测方差。因此,、实际上是W、μω、的函数。因此,综合式(19)、式(20),优化目标函数式(21)可进一步表示为
对于式(23)的优化求解问题,对应于由(22)给出的目标函数,现有较为成熟的各类优化方法均可应用。本文在案例验证中将采用应用较为广泛、具有较强灵活性的拟牛顿法进行多维搜索求解,具体通过MATLAB 中的“fminsearch”函数实现。
通过上述优化过程,对复合健康指标构建和随机退化建模中的参数进行反向优化调整,使得构建的复合健康指标与随机退化建模形成反馈闭环,实现两者的交互联动、交叉融合,在达到两者自动匹配的同时,也可利用优化技术确定复合健康指标对应的失效阈值均值和方差,这是本文提出的数模联动方法区别于现有研究方法的根本所在。
至此,本文给出了寿命预测性能导向的数模联动的复合健康指标离线构建过程。下文将重点解决如何将离线构建的结果应用于在线服役运行的多源传感监测线性随机退化设备,实现其剩余寿命的在线预测。
2 服役设备的在线剩余寿命预测
对于实际服役运行的多源传感监测线性随机退化设备,收集该设备从开始运行t0到当前时刻tK的多源传感监测数据,对应的监测时刻为0=t0<t1<…<tK。类似于第1.1 节的数据描述,令服役设备第j个传感器至当前时刻tK的监测数据为:其中=uj(tk)为第j个传感器在tk时刻的传感器监测值,k=0,1,…,K。那么,服役设备多源传感实时监测数据可以表示为U∈RS×(K+1),具体为
针对以上多源传感监测实时数据,采用式(2)的最大-最小归一化预处理,归一化处理后的监测数据记为,其中k=0,1,…,K。由此,归一化预处理后服役设备的第j个传感器实时监测数据可以表示为因此,xk=
为服役随机退化设备在tk时刻的所有传感器监测数据,其中k=0,1,…,K。在此基础上,服役随机退化设备的多源传感实时监测数据可以表示为X0:K,且有X0:K=[x0x1…xK]。
基于以上数据预处理,利用数模联动离线训练过程中获取的多源传感器融合系数W*和融合模型式(4),可以在线构建服役设备从开始运行t0时刻到当前tK时刻的复合健康指标序列z0:K=[z0z1…zK],且有
针对服役设备的复合健康指标序列z0:K,其对应的监测时刻序列为t0:K=[t0t1…tK],令{Z(t),t≥0}表示复合健康指标的随机退化过程,其在t时刻的退化量Z(t)可由式(5)描述为
考虑到服役个体设备与其他同类历史设备之间在存在共性的同时不可避免地存在个体差异性,令θ为随机变量,其先验分布表示为p(θ),以体现个体差异性,而σ2为表征同类设备的共性特征的固定参数。因此,基于z0:K可采用Bayesian 方法对退化模型参数θ进行在线动态更新以校准离线训练得到的模型,使退化模型充分准确地反映服役个体设备当前实际运行状态。在应用Bayesian方法时,首先需要确定σ2、先验分布p(θ)的形式及其超参数。具体地,已有研究中广泛将表示设备退化过程个体差异性的模型参数建模为正态分布的随机变量,并得到了较好的效果[9-10,19,31-32]。因此,在本文中,假设θ~N(μθ,),超参数为数学期望μθ、方差,其估计值可通过计算式(7)得到的̂的样本平均值和样本方差得到,即
媒体融合发展至今,早已经跳出“报网融合”这一基本形式的原有范围,进入媒体产品形态的多样化趋势中。将传统媒体文本和图像发展为视频、音频,甚至全新的4D感官体验。报纸二维码、有声报纸、三维报纸等,以及iPad终端媒体、微博、微信、QQ、社交网站、社交平台、网络电视等不同媒体,不同的移动终端以及不同的互联网平台将媒体融合产品形态多元化发挥到了极致,传统的媒体几乎被全部涉及。
此外,σ2可通过计算式(7)得到的的样本平均值估计得到,具体为
根据以上描述,在当前tK时刻,基于z0:K和随机退化过程的描述式(26),参数θ的后验分布可以通过Bayesian 定理进行更新,具体有
式中:p(z0:K|θ)为给定θ的条件下的z0:K联合概率密度函数。
考虑到由式(26)表示的随机过程{Z(t),t≥0}为高斯过程,易知条件分布p(z0:K|θ)服从高斯分布,即
由于本文中假设θ的先验分布p(θ)为正态分布,即
因此,p(z0:K|θ)与p(θ)是共轭的,从而使得后验估 计p(θ|z0:K) 也 是 高 斯 的 , 即且根据式(29)可得
在此基础上,基于首达时间的概念,将设备在当前时刻tK的剩余寿命LK定义为
式中:lK为表征剩余寿命的随机变量的具体实现值。
以上结果是在给定随机失效阈值ω、随机模型参数θ的条件下得到的条件分布,而随机模型参数θ的分布为正态分布且其参数由式(32)给出。因此,为得到设备的基于复合健康指标数据的剩余寿命分布,需要确定随机失效阈值ω的具体形式。为了计算方便,假设设备的随机失效阈值服从正态分布以刻画设备生产制造及运行服役条件变化造成的设备失效阈值的不确定性,即其概率密度函数为
在式(34)、式(35)的基础上,根据随机失效阈值的分布式(36)、模型参数后验分布p(θ|z0:K)估计结果式(30)~式(32),通过全概率公式可更新tK时刻设备剩余寿命的fLK|θ,z0:K(lK|z0:K)、FLK|θ,z0:K(lK|z0:K),分别表示为
3 应用验证
为验证所提出的数模联动剩余寿命预测方法,采用文献[33]提供的C-MAPSS 商用涡扇发动机退化数据集进行实现和评估,该数据集是由C-MAPSS 产生的,被广泛用于各种工况下的发动机退化性能实验及剩余寿命预测方法验证。
3.1 C-MAPSS 数据描述
为了监测发动机的运行状态信息,如图2 所示共有21 个传感器用于获取状态监测信息,传感器的具体信息如表1 所示。
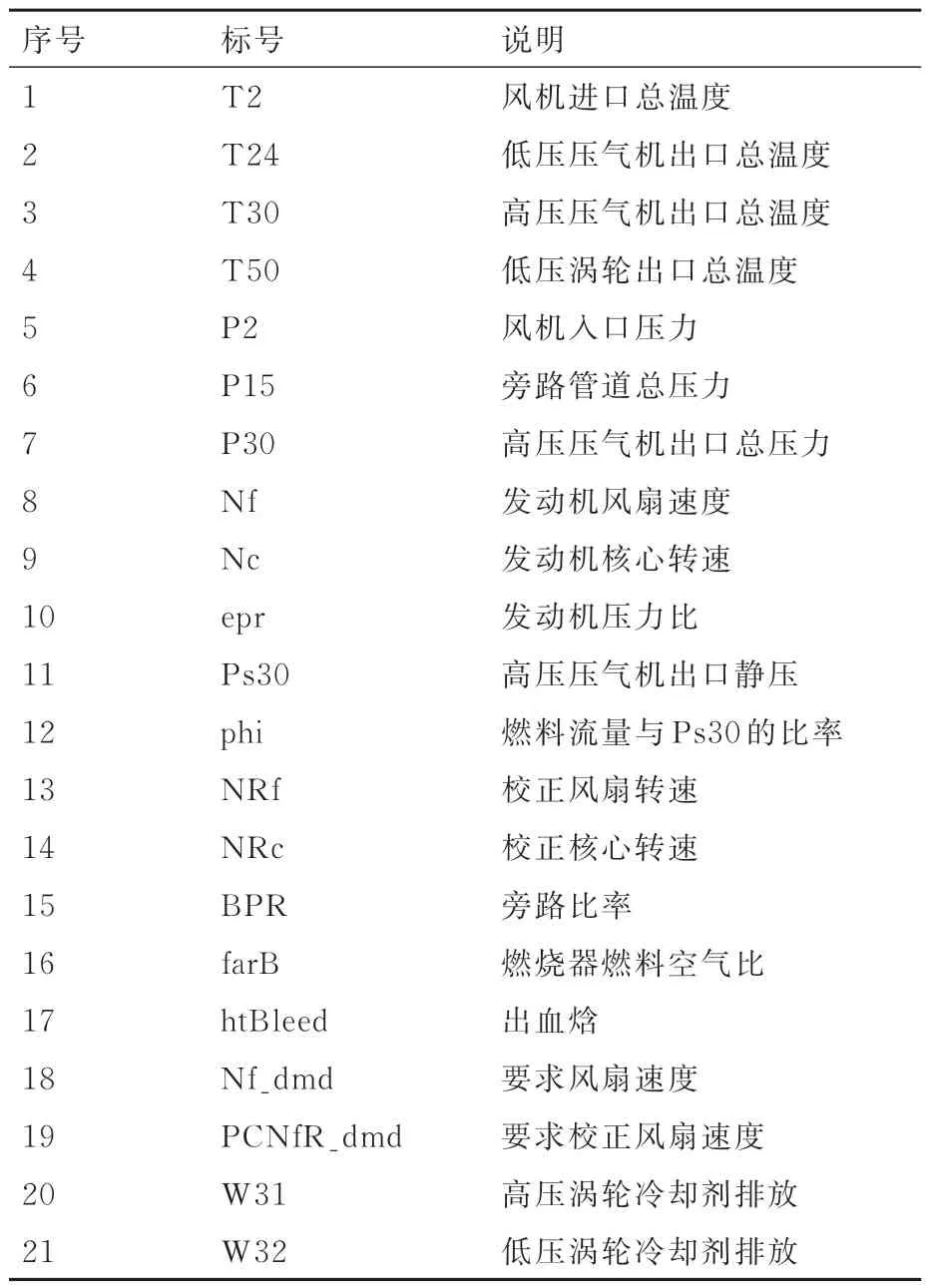
表1 21 个传感器信息Table 1 Detailed description of 21 sensors
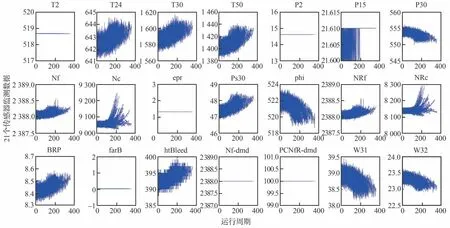
图2 100 个发动机的所有传感器原始监测数据Fig.2 Raw data of all sensors for 100 engines
本文主要采用通过C-MAPSS 数据集中的FD001 数据集进行效果验证,FD001 数据集包括100 个发动机训练数据集和100 个发动机的测试数据集[34],主要采用100 个发动机训练数据集从开始服役运行至失效的全寿命周期数据,主要原因在于测试数据中100 个发动机的多源传感数据都是截断数据,即发动机运行一段时间后停机得到的非全寿命周期监测数据,部分发动机停机过早导致数据过少甚至未出现退化趋势。FD001中100 个发动机的训练数据集共有20 631 组监测数据,其中每组监测数据包含了21 个传感器的监测数据,图2 给出了该数据集中100 个发动机的所有传感器原始监测数据。在该数据集中,每个发动机的最后监测周期对应着其实际的失效时间,即实际寿命为每个发动机对应的最后运行周期数。需要说明的是,该数据集在仿真过程中,人工加入了大量随机噪声,并且该数据集对应的发动机存在一定的初始磨损,但是并不知道初始磨损程度如何,也未提供发动机失效阈值,因此本文中考虑随机失效阈值对于该数据集是适用的。
3.2 传感器选择与数据预处理
根据图2 所示的传感器原始监测数据,可以发现并不是所有的传感器监测数据都能反映发动机的性能退化状态。例如,T2、P2、epr、farB、Nf-dmd、PCNfR-dmd 传感器数据基本没有变化,不具有时变的趋势性特征,难以为退化趋势预测提供有用信息。此外,图2 中还有部分传感器的监测数据存在时变趋势不明显或时变趋势一致性较差的问题。鉴于此,在多源数据融合前需要首先进行传感器选择。为此,本文选取衡量退化数据趋势性的皮尔逊相关系数[30,35]作为传感器选择的依据:皮尔逊相关系数绝对值越大,说明监测数据与运行周期线性相关性越好。
针对FD001 数据集中100 个发动机从开始服役运行至失效的全寿命周期数据,分别计算每个发动机的各个传感器数据对应的皮尔逊相关系数的绝对值,然后取所有发动机各个传感器相关系数绝对值的平均值作为传感器选择的依据该数据集,选择传感器相关系数绝对值的平均值较大的T24、T30、T50、P30、Ps30、phi、BRP、heBleed、W31、W32 共10 个传感器数据,即S=10。在此基础上,本文对该训练集中100 台发动机的以上10 个传感器监测数据进行前述如式(2)的最大-最小归一化处理。此外,考虑到该数据集在仿真过程中,人工加入了大量随机噪声,数据波动性比较大,本文对归一化后的数据进一步采用平滑滤波,选择平滑时间窗口长度为10。由此,通过传感器选择和数据预处理,形成了用于数模联动的多源传感数据寿命预测离线训练数据。
3.3 数模联动的寿命预测离线训练
基于发动机的监测数据实现数模联动的复合健康指标构建,需要求解优化目标函数式(22),其中的调整因子γ首先需要根据需要确定合适的值。为此,采用5 重交叉验证的方法,根据构建的复合健康指标的皮尔逊相关系数确定调整因子γ。具体地,从100 个发动机数据中随机选择60,利用该60 个发动机的数据,对每一个选择的调整因子γ求解优化目标函数式(22),得到融合系数和随机失效阈值的分布参数,然后采用5 重交叉验证的方法计算构建的复合健康指标皮尔逊相关系数的平均值。针对该数据集和以上交叉验证方法,可以发现调整因子γ=0.25时,由此构建的复合健康指标的皮尔逊相关系数平均值达到0.910 3,高于在其他调整因子γ值下得到结果。由此,本文在数模联动的复合健康指标构建中,设置调整因子γ=0.25。此外,为了说明本文数模联动的复合健康指标构建和寿命预测效果,采用1~60 号发动机的数据作为历史数据用于训练数模联动方法,61~100 号发动机的数据作为测试数据,验证所提方法的效果,此时N=60。
在以上模型设置下,基于1~60 号发动机的数据构成的历史数据,通过求解优化目标函数式(22)可以确定复合健康指标融合系数向量W、失效阈值均值μω、方差,应用MATLAB 中的“fminsearch”函数求解式(22),可以得到融合系数为{W*}={0.442 0,0.496 2,0.880 2,-0.527 8,0.377 2,0.212 1,0.432 3,0.022 8,-0.278 6 },随机失效阈值的均值为=2.067 8,方差为()*=0.000 9。图3 给出了本文应用“fminsearch”函数求解数模联动优化目标函数式(22)时目标函数值随迭代次数的变化过程,可以看出优化目标函数值能够快速收敛。
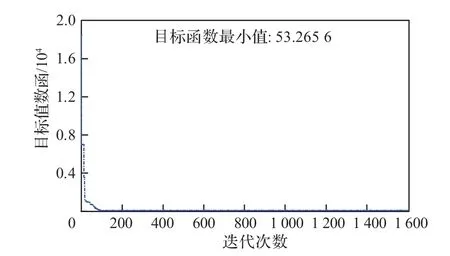
图3 数模联动优化目标函数迭代求解过程Fig.3 Iterative solution process of objective function for data-model interaction
基于优化结果,图4 给出了采用本文方法得到的100 台发动机复合健康指标的变化趋势和优化得到的平均失效阈值,其中包括60 个台训练发动机的复合健康指标和40 台测试发动机的复合健康指标。相比于基于神经网络等“黑箱”模型的方法直接建立监测数据和寿命之间映射关系,本文方法通过构建复合健康指标,可视化地呈现了发动机健康状态随时间演变的过程。
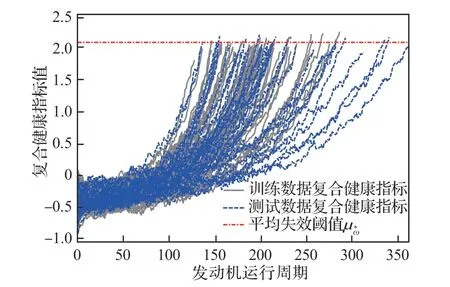
图4 100 台发动机的复合健康指标Fig.4 Composite health index of 100 engines
3.4 数模联动的复合健康指标构建
根据以上融合系数,可以利用61~100 号发动机的数据,融合该数据中40 个发动机考虑2、3、4、7、11、12、15、17、20、21 号传感器数据的复合健康指标。为了说明本文方法实现复合健康指标构建与随机退化建模交互联动后,所构建的复合健康指标的效果,对于61~100 号发动机分别计算数模联动优化复合健康指标的皮尔逊相关系数的平均值、单一传感器指标数据的皮尔逊相关系数的平均值、文献[30]中不考虑失效阈值随机性的复合健康指标的皮尔逊相关系数平均值,对比结果如表2 所示。
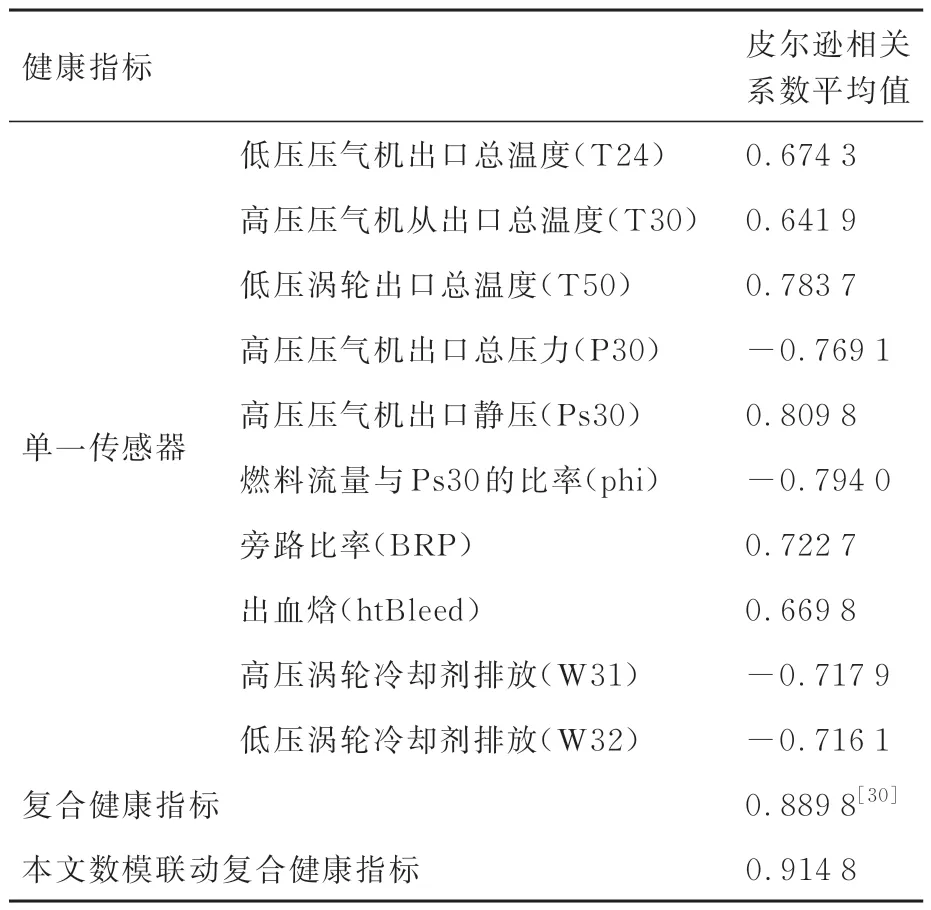
表2 皮尔逊相关系数对比结果Table 2 Comparison results of Pearson correlation coefficients
表2 的对比结果表明,本文提出的数模联动复合健康指标的皮尔逊相关系数平均值明显高于单一传感器对应的值,同时也高于文献[30]中不考虑失效阈值随机性的复合健康指标的皮尔逊相关系数的平均值。因此,本文方法在改善所构建的复合健康指标的时变趋势性方面具有优势。
此外,现有研究常将健康指标值在发动机失效时刻的分散程度用于评价复合健康指标构建方法[19,25],这是因为同类设备在相同的工作条件下健康指标值在失效时刻的分散程度应当尽可能小,这一分散程度体现了同类设备在相同条件下的质量一致性程度。为此,将61~100 号发动机数模联动复合健康指标失效阈值的方差与单一传感器对应的结果、文献[19,25,30]中对应的结果进行对比,具体结果如表3 所示。
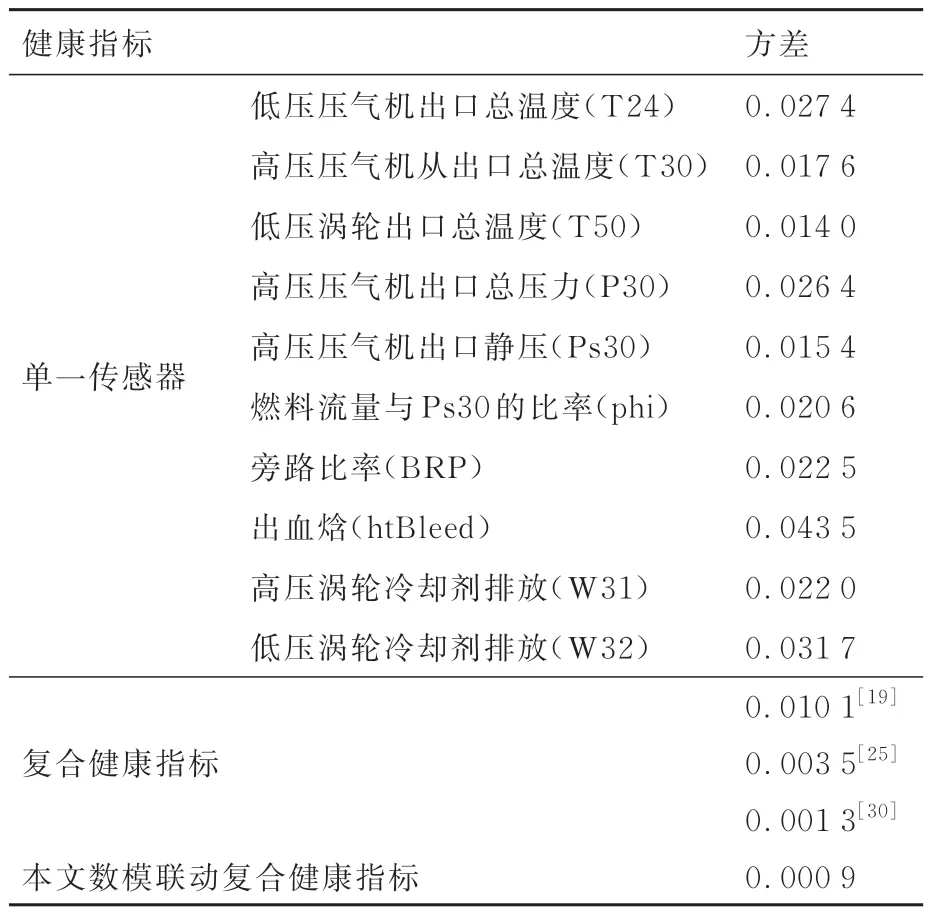
表3 失效时刻健康指标值的方差比较Table 3 Variance of health indices at failure time
根据表3 中对比结果,可以发现本文数模联动下构建的复合健康指标在失效时刻对应的方差小于单一传感器和文献[19,25,30]中构建的复合健康指标对应的方差,有助于更好地体现同类设备在相同条件下的质量一致性。综合表2、表3 的结果,可以看出本文数模联动方法构建的复合健康指标在改善复合健康指标在线性相关性和质量一致性方面具有优势,为该复合健康指标用于退化建模和剩余寿命预测提供了高质量的数据基础。
3.5 数模联动的服役设备剩余寿命预测
根据2.3 节构建的复合健康指标,应用本文提出的预测方法可以对61~100 号发动机的寿命进行预测。图5 给出了本文方法预测的寿命与实际寿命的对比结果,可以看出本文方法得到预测结果与实际寿命非常吻合。

图5 本文方法寿命预测结果Fig.5 Life prediction results by proposed method
为说明本文方法在针对服役设备剩余寿命预测时的效果,从61~100 号发动机中随机选择61、75、87、94 号等4 个发动机作为服役运行的发动机,应用第1 节数模联动的寿命预测方法,基于每个发动机的监测数据,对模型参数进行更新,进而预测剩余寿命。图6 给出了61、75、87、94 号发动机在最后17 个监测时刻的剩余寿命概率密度函数以及预测结果与实际值的对比。由图6 可见,随着发动机监测数据的累积,本文方法得到的剩余寿命预测结果与实际剩余寿命逐渐吻合,且剩余寿命的概率密度函数曲线越来越尖锐,表明预测的不确定性逐渐减小。
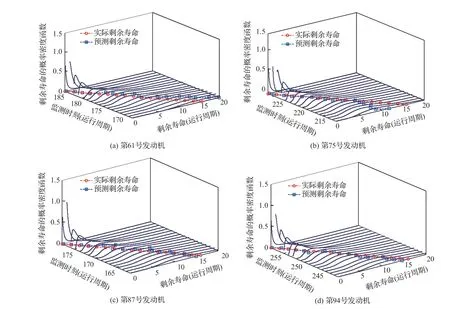
图6 第61、75、87、94 号发动机的剩余寿命预测及其概率密度函数Fig.6 Predicted RULs and associated PDFs for the 61st, 75th, 87th and 94th engines
此外,为对比本文方法对61~100 号发动机寿命预测的效果,图7 给出了本文方法、文献[30]中方法、基于单一传感器监测数据的寿命预测绝对百分比误差箱形图。这里,第i个随机退化设备的寿命预测绝对百分比误差ri定义为ri=其中为第i个随机退化设备实际寿命为第i个随机退化设备寿命预测值。
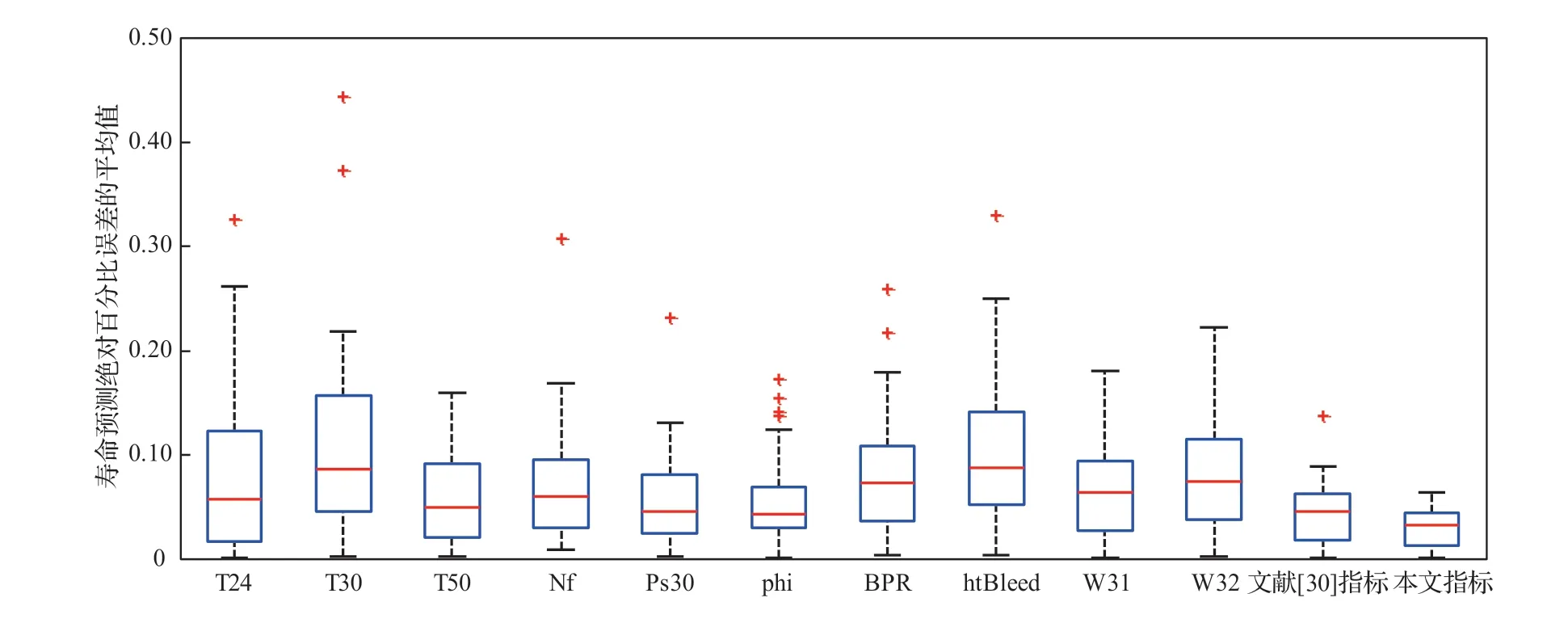
图7 61~100 号发动机寿命预测绝对百分比误差的箱形图Fig.7 Boxplot of absolute lifetime prediction errors for engines Nos.61-100
根据图7 所示,本文方法得到的寿命预测的绝对百分比误差和分散程度最小,能够得到更准确的寿命预测结果,验证了本文方法对多源传感监测设备剩余寿命预测考虑数模联动机制、模型参数更新、失效阈值不确定性等问题的有效性。
本文进一步将所提方法在C-MAPSS 数据集上的预测效果与相关的代表性最新方法进行对比,以说明所提方法的有效性和推广应用潜力。为此,本文采用针对该数据集的平均预测得分、准确性、均方误差及决定系数作为性能对比指标,具体定义如下。
1)平均预测得分(Score)
2)准确性(Accuracy)
其中
3)均方误差(Mean Squared Error, MSE)
MSE 反映了预测误差平方的平均值,其值越小越好。
4)决定系数(R2)
基于以上预测性能指标,将本文方法与基于深度置信网络+后向传播神经网络+改进粒子滤波算法的方法[24]、基于深度置信网络+改进粒子滤波算法的方法[24]、基于循环神经网络+自编码器的方法[36]、基于多损失编码器与卷积复合特征的两阶段深度学习方法[37]、文献[30]中在复合指标构建时不考虑预测不确定性和随机失效阈值的方法进行对比。表4 给出了对于61~100 号发动机,各类方法在评价预测得分、准确性、均方误差及决定系数等性能指标上的对比结果。
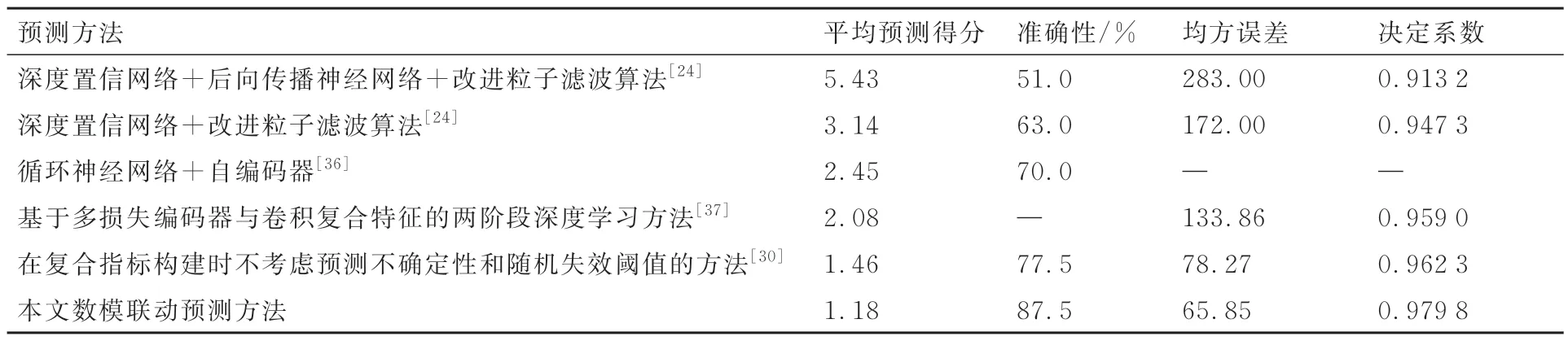
表4 预测性能比较Table 4 Performance comparison results
通过表4 中给出的本文方法与已有方法在平均预测得分、准确性、均方误差、决定系数4 个性能评价指标上的对比结果可以发现,本文所提数模联动预测方法,考虑了失效阈值随机性,构建以最小化预测均方误差及预测方差为核心的优化目标函数,对多源数据融合系数和随机退化建模中的随机失效阈值分布参数进行优化调整,在很大程度上实现复合健康指标构建与随机退化过程模型自动匹配的目标,提升预测性能。此外,通过与基于深度学习的已有方法比较发现,本文方法在预测性能上也具有相对优势,显示出本文数模联动预测方法在数据特征提取及剩余寿命预测应用方面具有进一步推广应用的潜力和价值。
4 结 论
本文的主要贡献和创新之处在于通过提出的数模联动机制建立一个多源传感监测设备复合健康指标构建、随机退化建模、随机失效阈值确定、寿命预测的统一框架,实现复合健康指标构建和随机退化建模及寿命预测的自动匹配。在线预测阶段通过提出的模型参数更新方法实现剩余寿命的在线预测和预测不确定性量化。在寿命预测离线训练阶段,基于融合系数构建多源传感监测数据复合健康指标、线性Wiener 过程建模复合健康指标时变演化规律、考虑失效阈值随机性的寿命预测、构建综合随机退化设备寿命预测均方误差和预测不确定的优化目标函数并反向优化,形成复合健康指标提取与随机退化建模的反馈闭环,对多源传感器融合系数和复合健康指标对应的随机失效阈值分布参数进行优化调整,实现复合健康指标提取与随机退化建模的交互联动,达到复合健康指标与随机模型自动匹配的目的。在服役设备剩余寿命预测阶段,为使数模联动得到的参数结果能更好的适应在线服役设备随机退化建模,研究了随机退化模型参数的Bayesian 更新,推导得到了考虑失效阈值随机性的服役设备数模联动的剩余寿命概率密度函数和概率分布函数的解析解。C-MAPSS 数据应用表明本文方法能有效提升多源传感数据融合效果及剩余寿命预测精度,具有进一步推广应用的潜力。但本文方法仍有一些问题值得进一步研究:
1)为了使所研究数模联动方法更具有一般性,在工程实际中,复合健康指标构建的融合函数可基于神经网络对任意函数的逼近能力,通过选择适当的激活函数和连接权重可实现对融合函数的构造,进而通过对所构造复合健康指标进行随机退化建模,从而构建综合寿命预测准确性和预测不确定性的优化目标函数,通过优化求解该目标函数得到复合健康指标构建网络的超参数。
2)主要研究了线性Wiener 过程模型下数模联动的退化建模及剩余寿命预测问题,对于具有非线性趋势退化的多源传感监测设备,如何实现数模联动下复合健康指标时变演化规律的非线性随机退化建模问题有待进一步研究。
3)主要针对单一失效模式下线性退化设备数模联动的剩余寿命预测问题,如何将本文的数模联动思路推广至多失效模式或多运行工况的情形(例如,C-MAPSS 商用涡扇发动机退化数据集中的其他数据均是针对多失效模式或多运行工况的情形),将是下一步值得深入研究的问题。
4)数模联动的核心是优化目标函数的构建,是连接多源传感监测设备复合健康指标构建与其时变演化规律建模及寿命预测的关键,本文构建了综合寿命预测准确性和预测不确定性的优化目标函数,但表征寿命预测效果的量并不局限于此,如何构造更能表征寿命预测效果的优化目标函数,基于该优化目标函数实现数模联动机制下的剩余寿命准确预测是另一个值得深入研究的问题。
