多旋翼无人机不同作业参数对花生冠层雾滴沉积分布特性的影响
2023-06-15漆海霞邹军苗秋实黄桂珍陈宇兰玉彬
漆海霞 邹军 苗秋实 黄桂珍 陈宇 兰玉彬

摘要:为探究无人机航空喷施时花生冠层雾滴沉积分布规律,设计无人机不同喷雾作业参数对花生冠层的雾滴沉积分布影响的试验。该试验以DJ T20型多旋翼电动无人机进行作业,以清水代替农药喷施采集雾滴沉积数据,以图像处理软件Depositscan来分析采集来的水敏纸数据。结果表明:各组试验的雾滴沉积分布趋势均相似,在靶区内雾滴沉积大致呈正态分布,受环境风场的影响,大量雾滴在中心航线左侧沉积,受无人机起飞时速度和高度的影响,各区域内第一条采样带R1的雾滴沉积效果较好;从雾滴沉积量、沉积密度均匀性分析可知,当飞行速度为2.5 m/s、喷雾流量为1.6 L/min,飞行高度为3.5 m时,喷雾效果最佳,为最佳作业组合;飞行高度、飞行速度对靶区内雾滴沉积量、雾滴沉积均匀性影响均显著。该研究对提高无人机喷施效率具有十分重要的指导意义。
关键词:无人机喷雾;花生冠层;作业参数;雾滴沉积;均匀性
中图分类号:S252
文献标识码:A
文章编号:2095-5553 (2023) 04-0057-08
Abstract: In order to explore the distribution pattern of peanut canopy droplet deposition during aerial spraying by UAV, an experiment was designed to investigate the effect of different spraying operation parameters of UAV on the droplet deposition distribution of peanut canopy. The experiment was conducted with DJ T20 multi-rotor electric UAV, and the fog droplet deposition data was collected with water instead of pesticide spraying, and the image processing software Depositscan was used to analyze the collected water-sensitive paper data. The results showed that the droplet deposition distribution trends of all groups of tests were similar, the droplet deposition in the target area was roughly normal distribution, influenced by the ambient wind field, a large number of droplets deposited in the left side of the central route, influenced by the speed and height of the UAV takeoff, the first sampling zone R1 in each area of the droplet deposition effect was better. From the analysis of the uniformity of droplet deposition amount and deposition density, it could be seen that when the flying speed was 2.5 m/s, the spray flow rate was 1.6 L/min, and the flying altitude was 3.5 m, the spray effect was the best, which was the best operation combination. The effects of flight height and flight speed on the droplet deposition volume and droplet deposition uniformity in the target area were significant. This study has very important guiding significance for improving the spraying efficiency of UAV.
Keywords: UAV spraying; peanut canopy; operational parameters; droplet deposition; uniformity
0 引言
我國是世界上最大的花生主产国,种植面积及产量均居世界第一。花生作为我国重要的经济作物和油料作物,在全国范围内均有种植,但花生种植过程中虫害也时常发生,导致产量大幅降低。为了贯彻落实国家保障油脂油料供给安全的战略方针,保障花生行业快速、有效的虫害防治对花生行业具有积极的意义[1]。
植保无人机航空施药技术作为中国近年来的新型植保作业方式,改变了中国传统植保作业方式的弊端。植保无人机不仅喷施作业效率高、雾化效果好、成本低,并且可以解决地面机械难以下田作业的问题等,正逐渐成为人们首选的植保作业方式[2-3]。截至2020年,我国植保无人机保有量超过了12万架,年作业面积超过了7.3 khm2,作业对象几乎覆盖了全部农作物,如花生、水稻、玉米等经济作物,并取得了理想的防治效果[4]。
喷雾雾滴在作物上的沉积效果是评价植保机械农田作业效果的重要指标[5-7],也是无人机作业中最被关心的问题,因而研究员针对无人机的作业质量和雾滴沉积效果方面的研究也逐渐得以开展[8]。王昌陵等[9-10]提出了一种植保无人机施药雾滴空间质量平衡测试法,该方法可以有效获得准确飞行速度和高度下无人机施药雾滴空间分布情况和下旋气流场分布情况;Thistle等[11]根据选定的试验参数对喷洒的雾滴沉积分布规律的影响因素进行探究,最后发展成为AGDISP(Agricultural dispersion)模型;Lan等[12]研究单因素对雾滴沉积分布规律的独立影响,预测了对雾滴沉积的最大影响因子;如杜文等通过调节无人机的作业高度进行水稻冠层雾滴沉积量评估试验。试验中无人机在不同作业高度时,雾滴在水稻冠层和下层具有不同的沉积效果,且分布均匀性也不同;薛新宇等[13]利用N-3型无人直升机对稻飞虱和稻纵卷叶螟的防治效果进行了不同作业高度和不同喷洒浓度的田间药效试验,得出无人机优于传统担架式喷雾机喷洒防治效果的结论;陈盛德等[14]以HY-B-10L型单旋翼电动无人机通过设置3种不同的飞行参数,研究喷雾雾滴在水稻冠层沉积分布规律并初步探究了各因素与雾滴沉积效果的相关性;郭祥雨等[15]设计了三因素三水平正交试验,探究了单旋翼无人机对棕榈树雾滴沉积效果的影响;Pan等[16]通过3W-LWS-Q60S型4旋翼无人机,针对果树不同形状和高度进行了冠层雾滴沉积效果试验;Lan等[17]研究四种雾滴防飘助剂对雾滴沉积影响,结果显示雾滴沉积量、雾滴粒径、覆盖率及雾滴沉积密度与助剂的使用有很大的相关性,助剂能有效提高雾滴的沉积量和沉积密度;Fritz等[18]通过试验评估了风场和喷嘴对航空喷施雾滴沉积和漂移分布效果的影响。
目前应用比较广泛的植保无人机类型有单旋翼油动、单旋翼电动、多旋翼电动等。不同类型的植保无人机由于其机身构造不一样,对作业参数的要求也不一样,为了便于无人机作业的快速推广,应通过试验优选出无人机的最佳作业参数。本文以DJ T20多旋翼植保无人直升机为例,通过不同飞行参数进行花生田间喷雾试验,针对无人机不同作业参数(飞行速度、高度、作业流量),设计了三因素三水平正交试验[19],对农药在花生冠层的雾滴沉积分布特性和均匀性进行研究,并优选出该无人机进行花生冠层喷雾作业的最佳参数,以期为植保无人机田间喷雾作业参数的选择提供参考,提高植保无人机作业喷施质量。
1 材料与方法
1.1 材料与设备
试验装置主要为作业植保无人机,数据收集、分析装置以及环境参数监测装置。本次作业采用DJ T20多旋翼植保无人机,主要性能指标见表1,DJ T20多旋翼植保无人机采用八喷头设计,6 L/min大流量水泵,配合深度优化的风场设计,可让雾滴均匀细密,轻松覆盖作物叶片两面。全新研发的四通道电磁流量计,可对DJ T20多旋翼植保无人机四条液体管路进行独立管控,使得各喷头喷洒效果更为接近,整体喷洒也更均匀。
采用HberW6-3便携式微型自动气象站,实时监测田间作业时的温度、风速、风向等环境因素;雾滴数据的收集需要万向夹、支架、水敏纸、橡胶手套、标签纸和密封袋等;数据分析需要扫描仪将水敏纸扫描成灰度图,通过Depositscan图像处理软件进行进一步分析。
1.2 试验方法
DJT20多旋翼植保无人机药效试验于2021年7月初在广东省阳江市梨花基地进行。试验区域是长为72 m,宽为25 m的花生地块。花生为拖拉机单粒精播,生长期为结荚期,平均株高为15 cm,行距为15~30 cm,株距为15~18 cm,株密度为2 024万株/hm2。试验时平均温度为32 ℃,湿度为35%,平均风速为1.3 m/s。
1.2.1 采样点布置
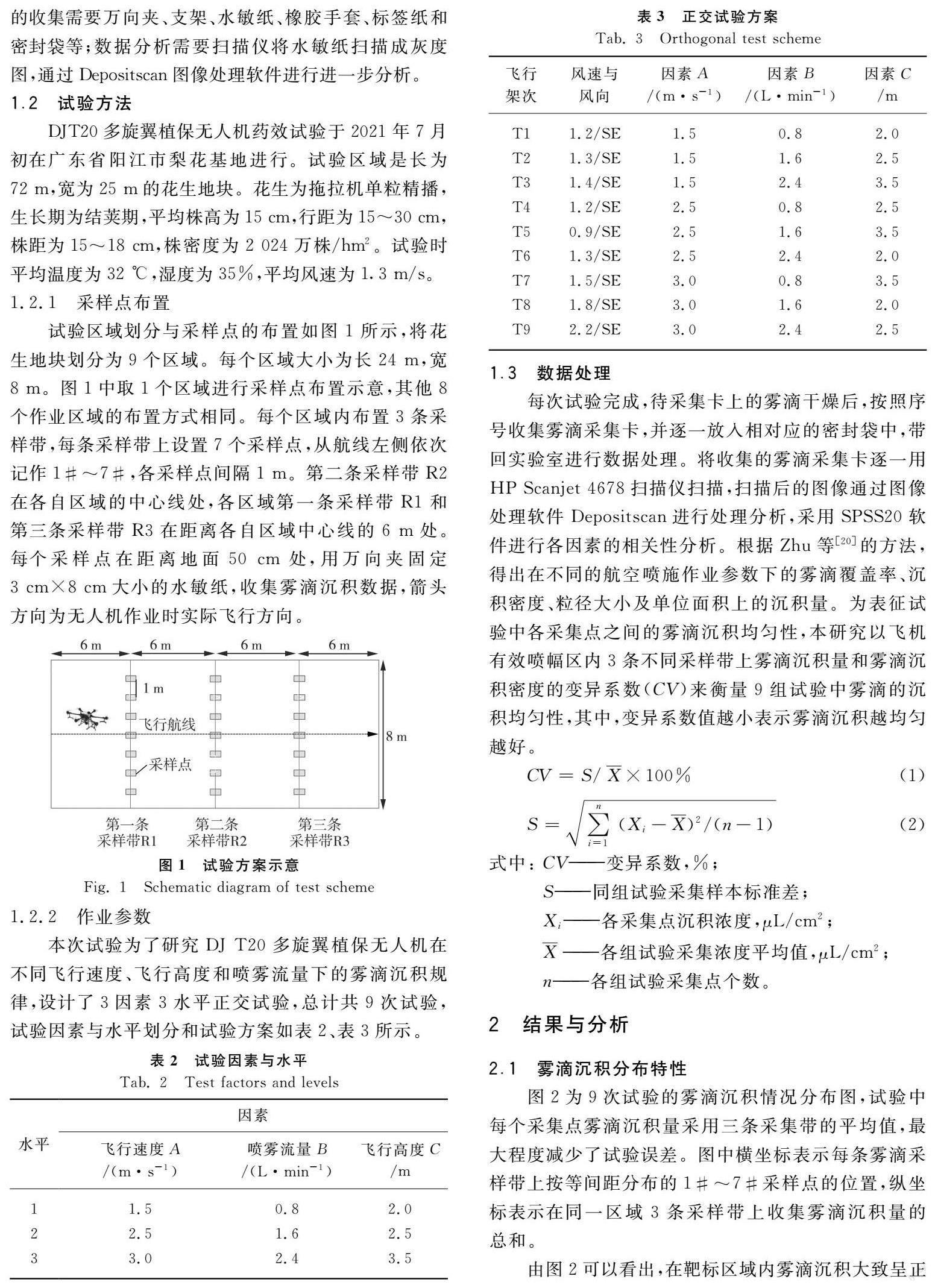
试验区域划分与采样点的布置如图1所示,将花生地块划分为9个区域。每个区域大小为长24 m,宽8 m。图1中取1个区域进行采样点布置示意,其他8个作业区域的布置方式相同。每个区域内布置3条采样带,每条采样带上设置7个采样点,从航线左侧依次记作1#~7#,各采样点间隔1 m。第二条采样带R2在各自区域的中心线处,各区域第一条采样带R1和第三条采样带R3在距离各自区域中心线的6 m处。每个采样点在距离地面50 cm处,用万向夹固定3 cm×8 cm大小的水敏纸,收集雾滴沉积数据,箭头方向为无人机作业时实际飞行方向。
1.2.2 作业参数
本次试验为了研究DJ T20多旋翼植保无人机在不同飞行速度、飞行高度和喷雾流量下的霧滴沉积规律,设计了3因素3水平正交试验,总计共9次试验,试验因素与水平划分和试验方案如表2、表3所示。
2 结果与分析
2.1 雾滴沉积分布特性
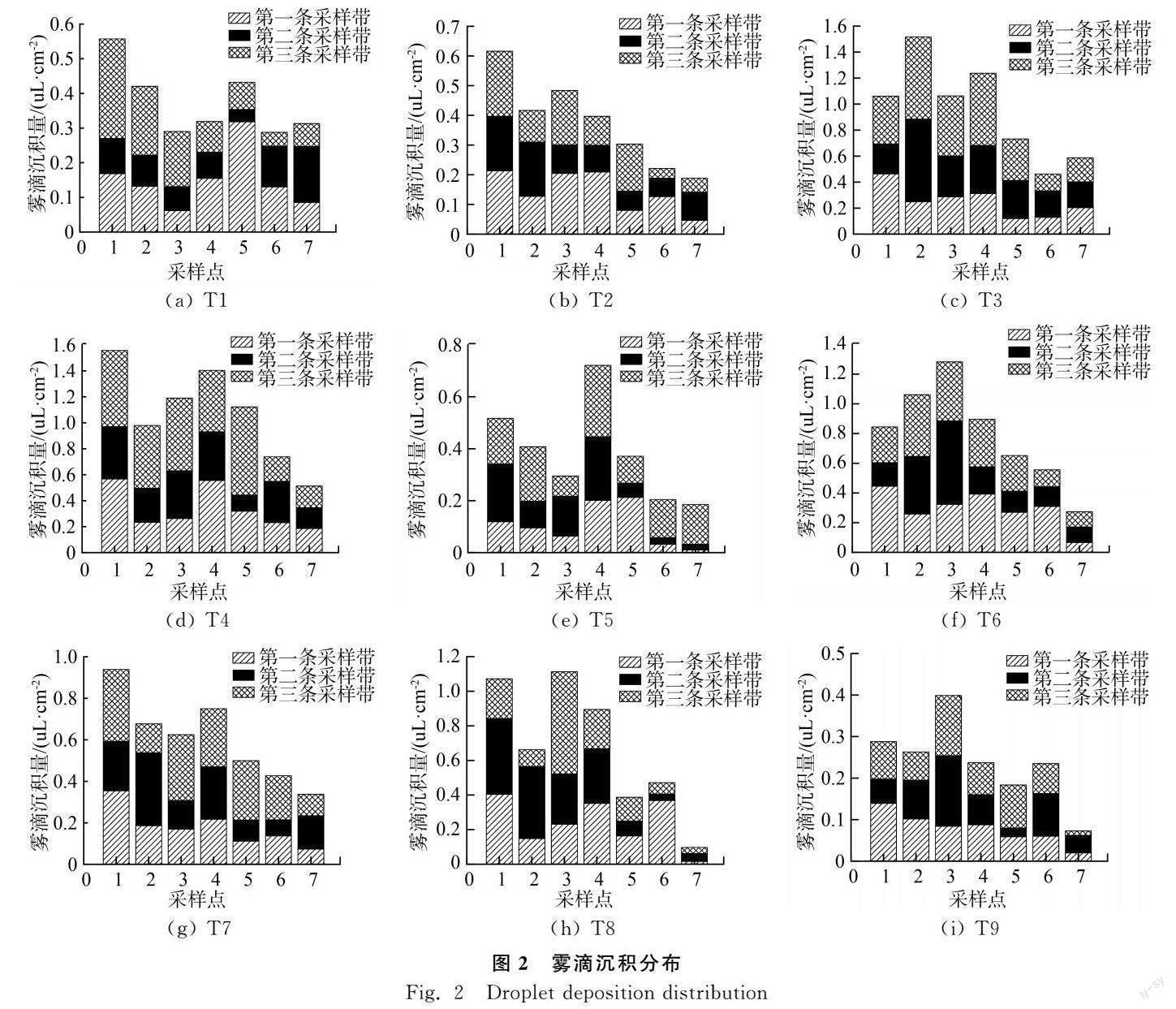
图2为9次试验的雾滴沉积情况分布图,试验中每个采集点雾滴沉积量采用三条采集带的平均值,最大程度减少了试验误差。图中横坐标表示每条雾滴采样带上按等间距分布的1#~7#采样点的位置,纵坐标表示在同一区域3条采样带上收集雾滴沉积量的总和。
由图2可以看出,在靶标区域内雾滴沉积大致呈正态分布。对比试验组T2、T5、T8可以看出,在喷雾流量一定的情况下,靶区内的雾滴沉积量因飞行速度与高度的增加呈现减少趋势,参照玄子玉[21]计算喷雾流量与飞行速度关系可知,随着无人机飞行速度的增加,使得单位面积内的喷雾量减少,而飞行高度的增加,无人机的作业喷幅也相对变小[22],同样造成单位面积内喷雾量的减少。试验组T1的飞行速度和飞行高度最低,有着最大的沉积量,也验证了该分析的可靠性。9组试验区域内三条采样带R1~R3飞行航线左侧(采样点1#~3#)的雾滴沉积量均值分别为0.435 μL/cm2、0.249 μL/cm2,0.289 μL/cm2明显高于飞行航线右侧的0.278 μL/cm2、0.111 μL/cm2、0.147 μL/cm2,且采样带R1的雾滴沉积量明显大于采样带R2、R3的值。由表3可以发现,在实际田间飞行作业时,外界存在东南风的干扰,即吹向飞行航线左前方向的侧向风,受环境风场的影响,雾滴沉积分布出现偏移,揭示了雾滴沉积效果受外界风场的影响;而第一条采样带R1的雾滴沉积量明显大于采样带R2、R3,且采样带R2、R3处雾滴沉积量相差不大,究其原因,是无人机作业经过第一条采样带R1时,无人机飞行不稳定,受旋翼风场的影响,从而造成花生冠层雾滴大量沉积,待飞行稳定后,雾滴沉积效果也趋于稳定,无明显差异。
2.2 雾滴沉积均匀性与因素显著性分析
为较为全面的分析雾滴沉积量分布的均匀性,从总体区域、无人机航线方向和无人机两翼方向3个方面进行研究。如表4所示,总体区域变异系数的计算取每次试验全部采样点的集合;无人机航线方向,取每次试验的列采样点雾滴沉积量的平均值为一个集合,数据量为采样点的列数;无人机两翼方向,取每次试验的行采样点雾滴沉积量的平均值为一个集合,数据量为采样点的行数。
通过变异系数大小来衡量花生冠层雾滴沉积量分布的均匀性,由表4可知,试验过程中,总体区域的雾滴沉积量变异系数平均值为51.7%,最大值为72.4%,无人机航线方向的雾滴沉积效果相对两翼方向更稳定。试验号T2~T7组次,总体区域、航向方向、两翼方向的变异系数均值分别为45.9%、23.7%、37.3%,远低于试验T1、T8、T9组次的60.7%、47.8%、48.2%。出现这一现象的原因,试验T1组次,可能是无人机起飞速度、高度较低造成的,在靶区内无人机下方旋翼风场和花生产生较强的紊流风场,使得下落的雾滴无法均匀的沉积在花生冠层;试验T7、T8组次,可能是下落的雾滴,受外界较强的环境风场影响,小粒径雾滴随风飘移出靶区,造成雾滴沉积量的减少、分布不均匀。综合分析,可以看出试验T5、T6组次的雾滴沉积量的分布较为均匀,为最佳试验组。
圖3和表5为9组试验雾滴沉积密度分布情况,其中,图3的每个采样点用实际测得的沉积密度值表示,表5中的沉积密度用每条采样带沉积密度的均值表示,用三条采样带的平均CV值来表示雾滴沉积均匀性。从雾滴沉积密度可以看出,当喷雾流量为0.8 L/min或者速度为2.5 m/s时,雾滴沉积密度值较小。飞行速度为2.5 m/s、喷雾流量为1.6 L/min,飞行高度为3.5 m时,无人机施药时雾滴沉积在三条采样带上的沉积密度分别为70.34个/cm2、106.01个/cm2、98.57个/cm2,且变异系数为41.1%,均优于其他试验组,因此试验T5为最佳试验组。
将图3和表5的数据导入SPSS20软件中进行方差分析,得到各作业参数与雾滴沉积效果的影响显著性水平,如表6所示。可以看出飞行高度(P=0.018<0.05)、飞行速度(P=0.027<0.05)、喷雾流量(P=0.046<0.05)对靶区内雾滴沉积量均有显著性影响;飞行高度(P=0.034<0.05)对雾滴沉积均匀性有显著影响,而喷雾流量、飞行速度对靶区内雾滴沉积分布均匀性无显著影响。
2.3 雾滴粒径分布
图4为DJ T20多旋翼植保无人机在9组田间作业中雾滴在不同采样点处的平均雾滴粒径分布情况。
雾滴体积中值直径(DV.50)主要分布在130~260 μm之间,满足国家对航空低容量喷洒杀菌剂雾滴粒径的要求(200~250 μm);大粒径雾滴主要沉积在中心航线附近,较小粒径的雾滴,主要分布在中心航线远处的两侧。这一现象的主要原因是较大粒径的雾滴受田间侧向水平风场的影响较小,在自身重力的作用下快速沉降到花生冠层叶面;粒径较小的雾滴更容易受到环境侧向水平风场的影响而发生飘移,且受侧向风场的影响,中心航线左侧沉积了较多的小粒径雾滴。
3 讨论
无人机飞行参数、自然因素、喷雾方式等是影响作物叶面雾滴沉积特性、分布均匀特性的主要因素。本试验发现无人机飞行速度、飞行高度对雾滴沉积量和分布均匀性有着显著影响,在喷雾流量一定的情况下,飞行速度过快,单位面积内的雾滴沉积量就会减少;飞行高度的增加会改变无人机的作业喷幅,容易造成田间作业的重喷、漏喷。姚伟祥等[23]研究发现自然因素中风场是影响雾滴沉积分布特性的主要因素,包括旋翼风场和环境风场。其中侧向风的大小和方向对有效喷幅有显著影响,小粒径雾滴会发生明显的飘移现象。文晟等[24]研究发现无人机机翼尾涡会随着飞行高度和飞行速度的变化而改变,而飘移是由雾滴因尾涡发生卷扬现象造成的。
本试验中T1组次由于无人机飞行速度和高度较低,旋翼风场与作物冠层产生较强的紊流风场,造成雾滴发生飘移,使得雾滴分布不均;试验T7、T8组次,受环境侧向风场的影响,小粒径雾滴向航向中心左侧大量沉积,甚至飘移,试验结果与上述旋翼风场和环境风场对雾滴沉积效果影响结论一致。本试验探究了无人机飞行参数对航空喷施雾滴沉积分布特性的影响,并分析了旋翼风场和环境风场对雾滴沉积的影响。由于雾滴在下落过程极容易因环境风发生飘移,飘移会造成农药的浪费甚至对周围作物造成不利影响。该试验结果用以指导无人机企业在设计喷雾系统时,应充分考虑旋翼风场对雾滴沉积分布影响,在田间实际作业时,不仅选择合适的飞行参数,还要考虑作物种类和风场等因素,提高航空喷施的效率。
4 结论
本次试验主要探究了多旋翼植保无人机在不同作业参数下,花生冠层的雾滴沉积效果规律。
1) 试验以DJ T20型多旋翼电动无人机为作业机体,设计不同维度作业参数进行试验,以图像处理软件Depositscan分析雾滴沉积数据,通过雾滴沉积量、沉积密度、雾滴粒径大小等指标来评价作业质量,并引入变异系数来衡量作业均匀性。
2) 从雾滴沉积密度和雾滴沉积均匀性分析:飞行速度为2.5 m/s、喷雾流量为1.6 L/min、飞行高度为3.5 m时,无人机施药时雾滴沉积密度分别为70.34个/cm2、106.01个/cm2、98.57个/cm2,且变异系数为41.1%;总体区域、航向方向、两翼方向的雾滴密度变异系数均值分别为41.8%、23.7%、34.7%均优于其他试验组,综合得出试验T5为最佳试验组。
3) 由显著性分析可知,飞行高度(P=0.018<0.05)、飞行速度(P=0.027<0.05)对靶区内雾滴沉积量、雾滴沉积均匀性影响均显著,喷雾流量对靶区内雾滴沉积量、雾滴沉积均匀性无显著性影响;此外,无人机旋翼风场、自然风场的风速和风向对雾滴沉积分布有着明显的影响,本研究为后续无人机的喷雾作业参数的设置提供理论指导。
参 考 文 献
[1] 薛新宇, 兰玉彬. 美国农业航空技术现状和发展趋势分析[J]. 农业机械学报, 2013, 44(5): 194-201.
Xue Xinyu, Lan Yubin. Agricultural Aviation Applications in USA [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(5): 194-201.
[2] Lan Y B, Hoffmann W C, Fritz B K, et al. Spray drift mitigation with spray mix adjuvants [J]. Applied Engineering in Agriculture, 2008, 24(1): 5-10.
[3] Zhang D, Chen L, Zhang R, et al. Evaluating effective swath width and droplet distribution of aerial spraying systems on M-18B and Thrush 510G airplanes [J]. International Journal of Agricultural and Biological Engineering, 2015, 8(2): 21-30.
[4] 何勇, 吴剑坚, 方慧, 等. 植保无人机雾滴沉积效果研究综述[J]. 浙江大学学报(农业与生命科学版), 2018, 44(4): 392-398, 515.
He Yong, Wu Jianjian, Fang Hui, et al. Research on deposition effect of droplets based on plant protection unmanned aerial vehicle: A review [J]. Journal of Zhejiang University (Agriculture & Life Sciences), 2018, 44(4): 392-398, 515.
[5] 张东彦, 兰玉彬, 陈立平, 等. 中国农业航空施药技术研究进展与展望[J]. 农业机械学报, 2014, 45(10): 53-59.
Zhang Dongyan, Lan Yubin, Chen Liping, et al. Current status and future trends of agricultural aerial spraying technology in China [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 53-59.
[6] 刘雪美, 刘兴华, 崔慧媛, 等. 作物冠层雾滴沉积研究进展与展望[J]. 农业机械学报, 2021, 52(11): 1-20.
Liu Xuemei, Liu Xinghua, Cui Huiyuan, et al. Research progress and trend analysis of crop canopy droplet Deposition [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(11): 1-20.
[7] 兰玉彬. 精准农业航空技术现状及未来展望[J]. 农业工程技术, 37(30): 27-30.
[8] Lan Y, Chen S, Fritz B K. Current status and future trends of precision agricultural aviation technologies [J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 17.
[9] 王昌陵, 何雄奎, 王潇楠, 等. 基于空间质量平衡法的植保无人机施药雾滴沉积分布特性测试[J]. 农业工程学报, 2016, 32(24): 89-97.
Wang Changling, He Xiongkui, Wang Xiaonan, et al. Distribution characteristics of pesticide application droplets deposition of unmanned aerial vehicle based on testing method of deposition quality balance [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(24): 89-97.
[10] 王昌陵, 何雄奎, 王潇楠, 等. 无人植保机施药雾滴空间质量平衡测试方法[J]. 农业工程学报, 2016, 32(11): 54-61.
Wang Changling, He Xiongkui, Wang Xiaonan, et al. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(11): 54-61.
[11] Thistle H W, Teske M E, Droppo J G, et al. AGDISP as a source term in far field atmospheric transport modeling and near field geometric assumptions [C]. 2005 ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, 2005: 1.
[12] Lan Y, Thomson S J, Huang Y, et al. Current status and future directions of precision aerial application for site-specific crop management in the USA [J]. Computers and electronics in agriculture, 2010, 74(1): 34-38.
[13] 薛新宇, 秦維彩, 孙竹, 等. N-3型无人直升机施药方式对稻飞虱和稻纵卷叶螟防治效果的影响[J]. 植物保护学报, 2013, 40(3): 273-278.
Xue Xinyu, Qin Weicai, Sun Zhu, et al. Effects of N-3 UAV spraying methods on the efficiency of insecticides against planthoppers and Cnaphalocrocis medinalis [J]. Acta Phytophylacica Sinica, 2013, 40(3): 273-278.
[14] 陈盛德, 兰玉彬, 李继宇, 等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报, 2016, 32(17): 40-46.
Chen Shengde, Lan Yubin, Li Jiyu, et al. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(17): 40-46.
[15] 郭祥雨, 薛新宇, 秦維彩, 等. 植保无人机作业参数对棕榈树雾滴沉积的影响[J]. 中国农机化学报, 2021, 42(6): 35-40.
Guo Xiangyu, Xue Xinyu, Qin Weicai, et al. Effect of operation parameters of plant protection UAV on droplet deposition of palm tree [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 35-40.
[16] Pan Z, Lie D, Qiang L, et al. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution [J]. International Journal of Agricultural and Biological Engineering, 2016, 9(4): 45-52.
[17] Lan Y, Thomson S J, Huang Y, et al. Current status and future directions of precision aerial application for site-specific crop management in the USA [J]. Computers and electronics in agriculture, 2010, 74(1): 34-38.
[18] Fritz B K, Hoffmann W C. Update to the USDA-ARS fixed-wing spray nozzle models [J]. Transactions of the ASABE, 2015, 58(2): 281-295.
[19] 范步高. 线性回归分析法在正交试验中的应用[J]. 中成药, 2013, 35(1): 178-182.
[20] Zhu H, Salyani M, Fox R D. A portable scanning system for evaluation of spray deposit distribution [J]. Computers and Electronics in Agriculture, 2011, 76(1): 38-43.
[21] 玄子玉. 喷雾机同步喷雾控制系统的研究[D]. 哈尔滨: 东北农业大学, 2009.
Xuan Ziyu. Research on synchronous spray control system of spraying machine [D]. Harbin: Northeastern Agricultural University, 2009.
[22] 陈盛德, 兰玉彬, 李继宇, 等. 植保无人机航空喷施作业有效喷幅的评定与试验[J]. 农业工程学报, 2017, 33(7): 82-90.
Chen Shengde, Lan Yubin, Li Jiyu, et al. Evaluation and test of effective spraying width of aerial spraying on plant protection UAV [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(7): 82-90.
[23] 姚伟祥, 兰玉彬, 王娟, 等. AS350B3e直升机航空喷施雾滴飘移分布特性[J]. 农业工程学报, 2017, 33(22): 75-83.
Yao Weixiang, Lan Yubin, Wang Juan, et al. Droplet drift characteristics of aerial spraying of as350b3e helicopter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(22): 75-83.
[24] 文晟, 韩杰, 兰玉彬, 等. 单旋翼植保无人机翼尖涡流对雾滴飘移的影响[J]. 农业机械学报, 2018, 49(8): 127-137, 160.
Wen Sheng, Han Jie, Lan Yubin, et al. Influence of wing tip vortex on drift of single rotor plant protection unmanned aerial vehicle [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 127-137, 160.
