含中介轴承的双转子系统动力学建模及振动分析
2023-06-15曾凡刘永葆王强李俊
曾凡,刘永葆,王强,李俊
(海军工程大学 动力工程学院,湖北 武汉 430033)
0 引言
双转子结构能提高压气机的工作效率、增加燃气轮机的喘振裕度,使其在更佳的条件下工作,成为燃气轮机转子系统经常采用的结构形式之一[1],广泛应用于舰船、航空燃气轮机上。作为燃气轮机动力输出的核心部件,双转子系统中的多频不平衡激励力和非线性构件,中介轴承带来的振动耦合,使得双转子系统表现出复杂的动力学行为,给燃气轮机结构系统设计和故障诊断带来困难[2]。
关于双转子系统动力学研究主要集中在运动模型的分析上,通过建立系统的运动微分方程,来研究其运动规律。文献[3– 4]基于拉格朗日方程、达朗伯原理推导给出了双转子系统的动力学方程,通过改变不平衡量、中介轴承非线性刚度等参数激励,分别得到其对系统振动特性的影响规律。文献[5– 10]均采用传递矩阵法,分析研究了内外圈转速比、轴承支承刚度等参数对系统动力学响应的影响。随着计算机的发展,利用有限元软件对双转子系统进行仿真模拟成为新的研究方向。文献[11– 16]就是利用梁单元法对双转子系统进行建模,通过计算系统的临界转速和振型,得到了双转子系统的稳态不平衡响应规律。但上述采用的低维方程、传递矩阵法以及梁单元法,都不能建立较为精确的双转子动力学模型,进而不能进行准确的定量分析。而有限元法中的实体单元建模法则具有精确建模、计算精度高、耦合分析能力强等优点,被广泛应用[17]。
本文以某型燃气轮机双转子系统为研究对象,将其简化为四盘四支承结构,利用有限元软件Workbench,建立中介轴承-双转子系统耦合的三维实体有限元模型。通过计算得到系统的固有频率及振型、临界转速,并将其与实验结果进行对比分析,验证仿真模型的可行性。通过计算双转子系统在不同转速下的振动响应,得到其不平衡振动耦合特性规律,为工程实际中转子系统的设计提供理论支撑。
1 双转子系统有限元计算模型
1.1 几何模型结构
某型燃气轮机转子系统采用双转子结构,其简化模型如图1 所示。该系统由高压外转子和低压内转子组成,通过中介轴承(圆柱滚子轴承)耦合联接在一起。高、低压压气机轮盘和高、低压涡轮轮盘均简化集中为轮盘(图1 中轮盘从左至右为盘1、盘2、盘3、盘4),整个双转子系统有4 个轴承支承位置,其中A(轴承1)、D(轴承4)点为低压转子支点,B(轴承2)点为高压转子支点,C(轴承3)为中介轴承支点。
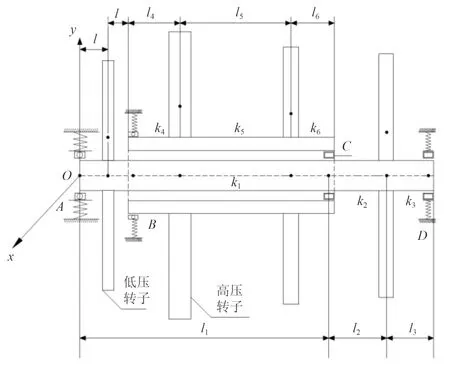
图1 双转子系统结构示意图Fig.1 Schematic diagram of double rotor system structure
1.2 双转子系统动力学方程
基于有限元建模的双转子系统动力学方程可表示为:
式中:M,C,Kd分别为双转子系统的质量矩阵、阻尼矩阵、刚度矩阵;Ω1,G1,K1,f1以及 Ω2,G2,K2,f2分别为高低压转子的转速、旋转产生的陀螺效应矩阵、刚度矩阵、激励向量;u为系统的节点振动位移向量。根据文献[10],轴承刚度一般在1×107~1×109N/m量级范围内,对于滚子轴承,径向刚度近似计算公式为:
式中:Fr为径向外力,N;n为滚子数目;L为滚子有效长度,mm;β1为接触角;Krr为轴承径向刚度,N/mm。本文建立的模型中,1 号、2 号和4 号轴承为滚珠轴承,中介轴承采用圆柱滚子轴承。
1.3 基本算法
在Workbench 中,采用直接积分法中的中心差分法对系统动力学方程进行积分。在中心差分法中,加速度与速度可用位移u表示为:
将式(1)和式(2)代入系统动力方程中,可得到各个离散点解的递推公式:
通过给定边界条件和一定的起步计算方法后就可以利用上式求解各个离散时间点的位移,从而求出应力、应变、加速度等量。
2 双转子系统动力学建模
2.1 双转子系统尺寸参数
根据对双转子分析,对实际结构进行简化处理。双转子系统的主要部件参数见如表1 和表2 所示。其中,k1,k2,k4分别表示轴承1、轴承2、轴承4 的支承刚度;c1,c2,c3,c4分别为4 个轴承处的阻尼系数,如图1 所示,各轴段的长度满足l2=l3=
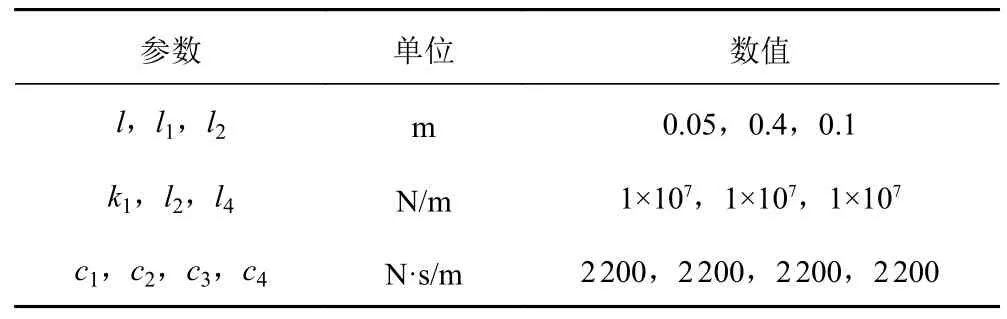
表1 双转子主要部件参数Tab.1 Parameters of main components of dual rotors

表2 中介轴承几何参数(NU304E)Tab.2 Geometric parameters of intermediate bearing
2.2 材料参数确定
根据双转子系统各部件的实际情况,定义各部件的材料参数,如表3 所示。

表3 双转子系统各部件材料参数Tab.3 Material parameters of each component of the dual-rotor system
2.3 有限元模型建立
首先在SolidWorks 软件中建立四轴承支承的双转子-中介轴承系统三维模型,通过集中质量法,用刚性盘模拟压气机转子轮盘和涡轮转子轮盘,进行简化处理。然后将几何模型导入Ansys Workbench 软件中。
在模型前处理时,在Geometry 中设置各部件的材料参数,高低压转子与中介轴承均采用3D 实体单元(Solid187)。该单元为三维10 节点四面体固体结构单元,每个节点有3 个方向的平动自由度,能够在做转动时考虑陀螺效应等影响。为避免初始穿透并且更加贴近实际结构,中介轴承中滚动体与轴承内、外圈以及保持架之间存在径向间隙。支承和其余轴承采用Connections 中Bearing 进行定义设置。假设轴承是各项同性的,Kyy=Kzz,交叉刚度Kyz=Kzy=0,轴承刚度和阻尼设置如表1 所示。系统整体阻尼比为1%。
在Mesh 中进行网格划分,由于系统中存在非线性结构,采用Quadratic 二次单元来进行划分,通过定义实常数的形式来控制模型的网格密度。得到系统整体有限元模型以及中介轴承模型分别如图2 和图3 所示,其中系统整体模型一共有266355 个节点、116056 个单元。
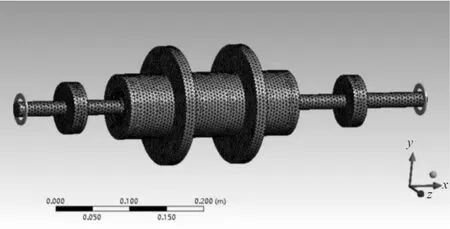
图2 双转子系统有限元模型Fig.2 Finite element model of dual rotor system

图3 中介轴承有限元模型Fig.3 Finite element model of intermediate bearing
2.4 边界条件设置
根据Ansys 中各个接触类型的特点,中介轴承内圈与低压内转子、中介轴承外圈与高压外转子均采用Bonded 接触行为。根据文献[15],在中介轴承中,滚动体分别与内圈、外圈之间均建立接触对,采用Frictional非线性接触行为,并设置滚动体与内圈、外圈之间的摩擦系数为0.2;滚动体与保持架之间建立接触对,并设置其摩擦系数为0.02。对于4 个轴承,限制其沿轴向(X方向)的平动,以及沿Y,Z方向的转动,只考虑径向力作用的情况(即施加Standard Earth Gravity设置,方向为Y的负方向)。
3 仿真过程与结果分析
3.1 转子系统临界转速特性
根据建立的有限元模型和边界条件的设置,在分析时考虑陀螺效应。计算双转子系统同向旋转时,系统的前4 阶固有频率及振型如图4 所示(设定内外转速比为1:1.28)。
图4 双转子系统的前四阶振型Fig.4 The first four vibration modes of the dual-rotor system
以整个系统为观测对象,得到其前4 阶固有频率及振型图,可看出第1 阶固有频率为51 Hz 左右,其振型表现为内、外转子平动;第2 阶固有频率为103 Hz左右,其振型表现为内转子弯曲、外转子平动振型;第3、4 阶表现为内转子弯曲、外转子弯曲振型。
模型中低压转子盘1、高压转子盘3 存在不平衡量(不平衡质量分别为2.5 kg 和4 kg,偏心距均为1×E−5m),高低压转速比一定。此时,2 个转子都存在不平衡量,即当系统工作时内外转子都将受到不平衡力作用。通过模拟高压转子转速从0~10000r/min时振动测点的响应幅值,得到位移响应随转速变化的不平衡响应曲线,如图5 所示。

图5 双转子系统高、低压转子的不平衡响应Fig.5 Unbalanced response of high and low pressure rotors in a dual rotor system
以高压转子盘3的Y向位移为观察对象,在后处理图中,上部分为转速与振幅的关系,下部分为相位与振幅的关系。由图5,测点处出现了2 次幅值增大的现象,即出现2 处振动突变,第一处振动突变在3 034 r/min左右,第二处振动突变在6 030 r/min左右,相位约为168°。
3.2 转子系统不平衡响应
为研究不同转速下的双转子系统不平衡振动响应,选取2 个振动突变处附近的转速以及1 个非共振位置的转速。高压转子转速分别为320 rad/s,550 rad/s,640 rad/s,激振力为1 000 N 时,以高压转子盘3 作为观测对象,图6~图8 分别为双转子系统在3 种转速下,测点位置的振动响应。

图6 高压转子转速320 rad/s 时,系统振动响应Fig.6 Vibration response of the system when the high voltage rotor speed is 320 rad/s
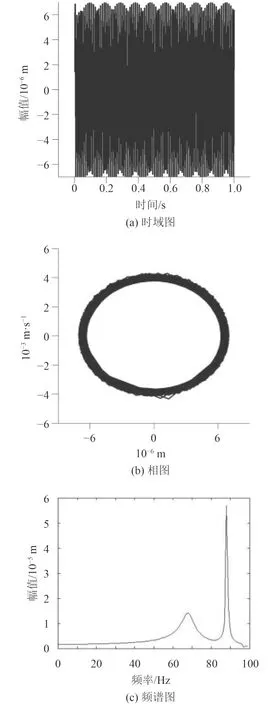
图7 高压转子转速550 rad/s 时,系统振动响应Fig.7 Vibration response of the system when the high voltage rotor speed is 550 rad/s
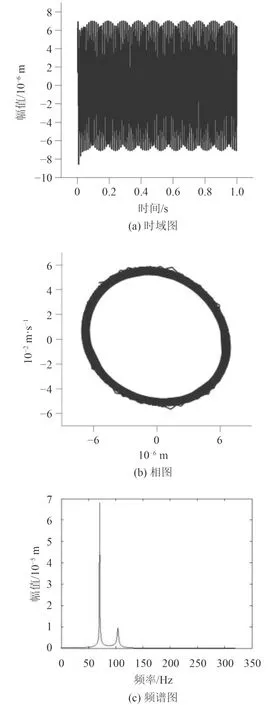
图8 高压转子转速640rad/s 时,系统振动响应Fig.8 Vibration response of the system when the high voltage rotor speed is 640rad/s
如图6 和图8 所示,双转子系统在2 个幅值响应较大的转速附近,所得到的时域图均可看作近似的谐波信号;相图中的相轨迹均形成1 个闭合圆轨道,表现为包络环形,但图6 中相图的包络形状更接近实心,说明在第1 个振动突变处的高低压转子间不平衡振动耦合更明显;对于频谱图,图6(c)只含高压转子转频,因此第1 个振动突变是由高压转子偏心激励引起的。图8(c)中存在高、低压转子转频,以低压转子转频为主,可知第2 个振动突变是由低压转子不平衡激励导致的。
由图7 可知,选取双转子系统在振动响应不剧烈区域的转速下,其振动响应较小。相图中的相轨迹表现为椭圆形;频谱图中含高、低压转子的转频,系统的振动由高、低压转子的双频偏心激励引起。
4 试验及结果分析
采用双转子试验台,使用双电机驱动,以质量盘模拟压气机和涡轮结构,并且质量盘上可通过安装螺钉来设置不平衡量,增加不平衡激励。采用转速传感器来实时测量转子的转速,在高压转子位置处设置x和y两个方向的电涡流位移传感器,分别测量水平方向和竖直方向的位移,在轴承座上安装加速度传感器监测轴承振动情况。试验过程中,使用D A S P智能采集系统进行数据采集,采样频率设为12.8 kHz。高压转子转速从0 升至800 rad/s,设置高低压转速比为1.28。
高压转子的时域波形图如图9 所示,横坐标为时间,纵坐标为位移幅值。可以看出在150 s,275 s,300~360 s,380 s 附近时,转子的振幅发生明显的变化,说明系统的运动状态发生了改变。高压转子的时间−转速曲线图和时间−振动幅值曲线如图11 所示,250~310 s 升速,350~400 s 降速。可以看出在升速和降速过程中,转速在3 000 r/min,6 000 r/min 附近时,高压转子的振幅出现突跳现象,振动明显增强,说明此时可能经过了临界转速,系统发生了共振。可得到高压转子的前2 阶阶临界转速,将其与仿真结果相对比,相对误差均在1.2%以内,验证了仿真模型的准确性、可行性。
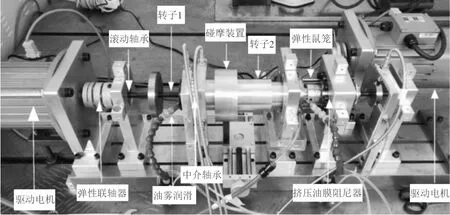
图9 双电机驱动的双转子实验台Fig.9 Double-rotor test bench driven by double motors
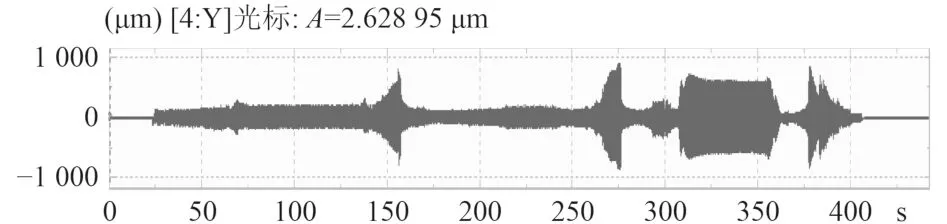
图10 高压转子的时域波形图Fig.10 Time-domain waveform diagram of high-voltage rotor
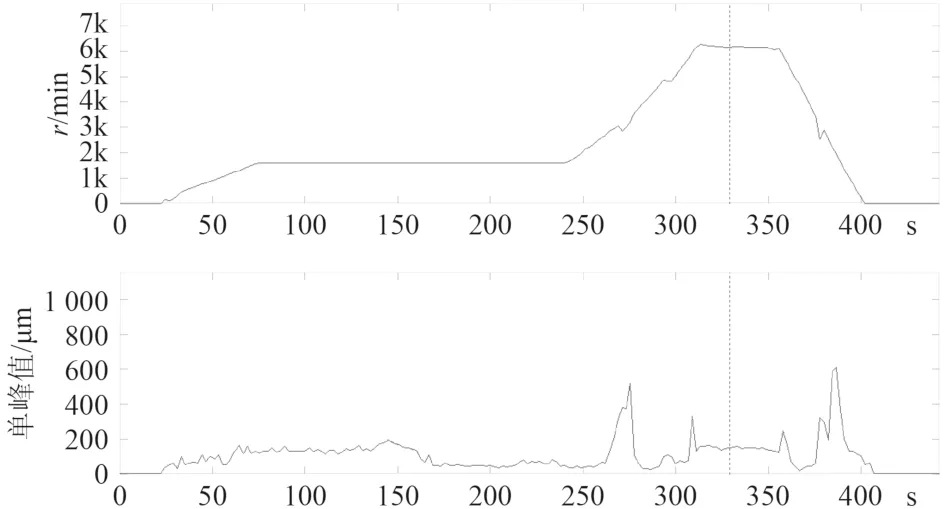
图11 高压转子的转速幅值曲线Fig.11 Speed amplitude curve of high pressure rotor
5 结语
本文通过建立中介轴承-双转子系统的三维实体模型,基于显式算法,考虑内外转子转速、负载、偏心、接触及摩擦等因素,对双转子系统的动力学特性进行仿真研究,得到如下结论:
1)通过对系统的固有振动特性以及临界转速的计算,并与试验结果进行对比,证明仿真模型的可行性;
2)研究双转子系统存在偏心时的不平衡响应,并分别给出系统在振动平缓位置以及2 个振动突变处的振动响应规律,为进一步研究双转子系统的故障特性提供基础。
