U 型减摇水舱的流体动力特性分析及控制系统设计
2023-06-15肖青青
肖青青
(长江大学 文理学院,湖北 荆州 434020)
0 引言
船舶航行过程中的外载荷主要包括风载荷、波浪载荷和其他碰撞过程载荷,其中,波浪载荷具有一种规律性,船舶在海面航行时受到波浪载荷的作用会发生横摇运动,且随着波浪载荷的增加,船舶横摇运动的频率和幅度都会增加,可能引发船舶发生倾覆事故。因此,针对船舶横摇运动的控制技术一直以来都是研究的重点。
减摇水舱是一种常见的船舶横摇控制技术,减摇水舱通过控制水的振荡周期,与不断变化的波浪载荷相互影响,最终结果是降低波浪载荷对船舶的影响,实现减摇的目的。传统的减摇水舱结构简单,没有独立的控制系统,减摇效果一般。本文在传统减摇水舱的基础上,设计开发一种具有自动控制系统的新型减摇水舱,并对减摇水舱的流体动力学特性进行分析。
1 船舶摇动的水动力建模
船舶在波浪载荷下会发生多自由度的运动,以横摇运动的影响最大,首先建立波浪载荷模型为:
式中:B为海浪的高度,wo为频率,φ0为海浪的初始相位角。
针对船舶在海浪中的摇动,建立运动坐标系如图1所示。
在该坐标系下建立船舶摇动方程:
式中:J0为船舶绕OZ轴的转动惯量;∆J为附加转动惯量,kg·m2;θ为摇动角;h为吃水深;κ为摇动的阻尼系数;D为横剖面船舷宽度;T0为船舶在波浪载荷作用下的摇动力矩;F0为船舶受到的干扰作用力。
船舶产生的摇动具有一定周期性,其周期可用下式计算:
图2 为不同周期的船舶摇动角度曲线示意图。

图2 不同周期的船舶摇动角度曲线Fig.2 Ship rocking angle curves for different cycles
由于船舶摇动不仅与波浪、海风等外加载荷有关,还与船舶自身的运动状态有关[1],包括船舶航行的速度、迎浪面积、升力系数等,定义航行速度为V1,则可得摇动过程船舶的合力为:
式中:S为迎浪面积;δ为升力系数。
摇动过程受到的干扰合力矩为:
式中,A为航向角。
2 U 型减摇水舱的结构原理及水动力建模
为了控制船舶在波浪载荷下的摇动,提升船舶航行的安全性,减摇水舱作为一种有效的减摇设备被广泛使用。减摇水舱结构和原理简单,在船舶中低速航行时具有比较好的减摇效果。
减摇水舱目前主要有2 种:
1)被动式
被动式的减摇水舱是指本身没有控制系统,不能产生动力来主动产生减摇力矩,只能依靠船舶和水舱的惯性来减摇,起到阻尼器的作用。被动式减摇水舱的建造成本低,但减摇能力相对较差。
2)主动式
主动式减摇水舱集成了控制系统,能够通过水泵或者其他设备使水舱重心主动变化,能够提前预测船舶发生摇动的角度和方向,提前对船舶施加力和力矩。主动式减摇水舱的减摇效果好,相对应的成本略高。
主动式减摇水舱通过调节水舱的稳定力矩,与扰动力矩的周期相同、相位相差为180°时,可以将扰动力矩抵消,实现船舶减摇功能。
图3 为主动式减摇水舱的剖面结构图。

图3 船舶主动式减摇水舱的剖面结构图Fig.3 Profile structure of the ship's active anti-roll tank
为了更方便地进行减摇水舱工作过程的流体动力学分析,做以下假设:
1)船舶在波浪载荷下的摇动是指通过重心G的oy轴摇动,在短时间内,该中心轴可视为固定。
2)减摇水舱关于船舶的纵向中心线对称分布,可视为沿船长方向是等截面的,这种假设有利于简化壁是直的并且是等截面的。
3)整个水舱横截面上是相等的,用单一坐标可以描述水舱内液体的运动。
建立减摇水舱与船舶的耦合流体动力学模型为:
式中:ϕ为船舶摇动的角度,θ为减摇水舱摇动的角度,Ju为船体本身的质量惯性系数,Jt为减摇水舱中液体相对于oy轴的质量惯性系数[2],Ks为船体的摇动复原系数,Bt为水舱的摇动阻尼系数,Kt为水舱的摇动复原系数。
Jt计算式为:
式中:A0为水舱液面以下的截面积,R为水舱的宽度,At为水舱液面以上的截面积,h为水舱内的水深。
Kt计算式为:
在水舱减摇过程中,水舱产生的力矩为:
式中:as,bs,λ分别为转矩因子[3],用下式计算:
式中:ω为船舶的摇动角速度,ωs为减摇水舱的摇动角速度。
水舱减摇力矩与船体扰动力矩的相互作用原理可用图4 表示。

图4 水舱减摇力矩与船体扰动力矩的相互作用原理Fig.4 The interaction principle of the anti-roll torque of the tank and the disturbance moment of the hull
当水舱减摇力矩与扰动力矩周期相同,相位角错开180°时,力矩相互抵消,产生船舶的减摇效果。
3 U 型减摇水舱的控制系统设计及仿真
3.1 船舶U 型减摇水舱控制系统的设计
主动式减摇水舱的控制系统是一个闭环系统,同时具有非线性特征。本文建立的U 型减摇水舱控制系统包括上位机平台、信号采集设备、控制电路、液压回路、水舱步进电机等。
图5 为船舶U 型减摇水舱控制系统的设计原理图。

图5 船舶U 型减摇水舱控制系统的设计原理图Fig.5 Design schematic diagram of ship U-shaped anti-roll tank control system
1)上位机平台
U 型减摇水舱控制系统的上位机是控制系统的核心,选用微型计算机作为上位机,CPU 硬件为coreI7-5 200[4],运存8 G,数据存储空间256 G,能够满足减摇水舱工作过程的数据运算和数据存储需求。
2)执行单元
执行单元是减摇水舱实际进行动作的单元,包括水泵、水舱步进电机、控制电路、液压回路等。执行单元接收来自上位机的指令,控制水泵流量来产生减摇力矩。
3.2 U 型减摇水舱控制系统的减摇特性仿真
减摇水舱控制系统的特性通过Simulink 仿真来实现,关键步骤包括波浪载荷输入、船舶模型、横摇运动模型和减摇控制系统模型输入、摇动特性仿真、结果输出等。
1)波浪仿真模型
Simulink 中建立的波浪仿真模型包括规则波和不规则波2 种,规则波如P-M 谱等[5]。波浪载荷是进行仿真的输入条件。
2)Simulink 数学模型
在Simulink 中需要建立船舶的摇动模型、减摇控制系统数学模型、减摇水舱的力矩模型等。
图6 为基于Simulink 的减摇水舱控制系统仿真流程图。
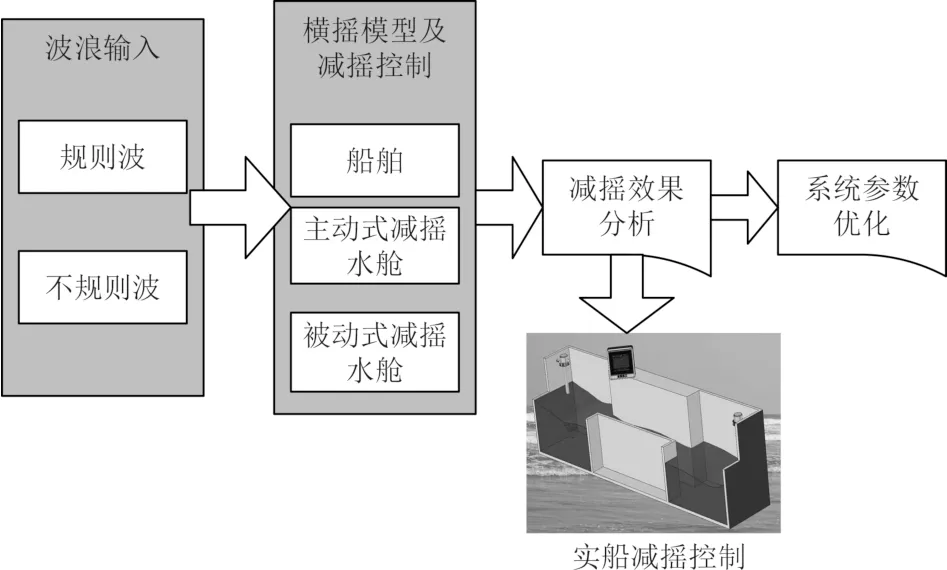
图6 基于Simulink 的减摇水舱控制系统仿真流程图Fig.6 Simulation flow chart of anti-roll tank control system based on simulink
3)船舶参数
在仿真系统中定义船舶的排水量、船宽、质心高、吃水、长度和船舶的横摇周期分别为5 000 t,25.6 m,3.2 m,12.3 m,5.8 m,12.25 s。
图7 为仿真得到的减摇水舱控制系统性能对比曲线。

图7 仿真得到的减摇水舱控制系统性能对比曲线Fig.7 Comparison curve of performance of anti-shake tank control system obtained by simulation
4 结语
U 型减摇水舱对于降低船舶在波浪载荷下的摇动有重要的作用,本文针对U 型减摇水舱的结构原理、水舱与船体耦合系统的流体动力学特性等进行研究,开发U 型减摇水舱的控制系统,并进行系统的仿真验证。
