采用改进粒子群算法的异步电机参数辨识
2023-06-10谢国民张佳琪
谢国民,张佳琪
(辽宁工程技术大学 电气与控制工程学院,辽宁 葫芦岛 125105)
0 引言
异步电机运动性能稳定、体积小、重量轻、操作简单,是一种应用广泛的重要用电负荷[1]。为实现高效控制、准确能效计算,以及快速的故障诊断,有必要对电机参数进行参数辨识[2]。
传统的电机参数辨识方法是通过电机短路与空载实验进行,这种方法获取的电机参数精度较低,不能实现电机参数的在线辨识。因此,研究人员将最小二乘法、滑模观测器法[3-5],以及智能优化算法应用于电机参数辨识中。由于智能优化算法具有自适应性强、便于实现快速计算等优点,因此得到广泛的应用[6]。目前,异步电机参数辨识中应用较多的算法有遗传算法、苍狼算法,以及粒子群算法(particle swarm optimization,PSO)。文献[7]提出一种基于苍狼算法的感应电机改进模型参数辨识。文献[8]提出一种基于量子粒子群优化的动态标定辨识方法。文献[9]提出一种基于动态粒子群算法的推进电机参数识别方法。以上3种辨识方法中,遗传算法和苍狼算法性能较差,且存在局部寻优问题;全局粒子群算法极易出现虚假收敛和陷入局部解问题,导致参数辨识精度不高;粒子群算法不易陷入局部最优,但收敛速度慢。
针对以上问题,提出一种基于具有麻雀群预警机制的粒子群算法(sparrow particle swarm optimization,SPSO)的异步电机参数辨识方法。为避免PSO算法陷入局部解,引入麻雀群算法的预警机制对PSO算法进行改进。在d-q坐标系中对某型异步电机进行建模,采用SPSO算法对异步电机进行参数辨识,通过仿真实验对SPSO算法的有效性和可靠性进行验证。
1 异步电机参数辨识模型
1.1 异步电机模型
三相异步电机状态方程[10]为
式中,
式中:p为微分算子;ids、idr、idm分别为定子d轴电流、转子d轴电流和励磁d轴电流;iqs、iqr、iqm分别为定子q轴电流、转子q轴电流和励磁q轴电流;Rs、Rr、Rm分别为定子电阻、转子电阻和励磁电阻;Lds、Ldr、Lm分别为定子漏感、转子漏感和励磁电感;Lr为转子电感,Lr=Ldr+Lm;ω为定子侧旋转磁场的电角速度;ωr为转子的电角速度;pn为极对数;J为转动惯量;Tm为负载转矩;Uds、Uqs为定子d、q轴电压。
式(1)~式(2)中所包含的变量均为折算至一次侧的值。
1.2 异步电机参数辨识模型
获取异步电机三相电压与电流信号[11],经d-q变换后得到新的电压与电流信号分别为ud、uq、id、iq,将所测实际电流与对应的电角速度组合,可得实际值为
此时模型异步电机参数可表示为x=[Rs,Rr,Ls,Lr,Lm,J],输出值为
异步电机的辨识过程是通过不断地求解异步电机模型参数,使实际测量值与模型的输出值相等。因此,基于SPSO算法的异步电机参数辨识方法的适应度函数为
在辨识过程中,通过寻优使式(5)取得最小值,则辨识成功。
2 SPSO算法
运用SPSO进行电机参数辨识的步骤如下。
(1)初始化粒子群参数。
(2)对于D维、N个个体的SPSO,其个体位置为Xi=(xi1,…,xii,…,xiD),则所有种群为X=(X1,…Xi,…,XN),粒子在迭代过程中按式(6)进行更新。
式中:Vi(t)为当前代粒子移动速度;ω为惯性权重因子;c1与c2分别为算法的自我学习与社会学习因子;r1与r2为0至1之间服从均匀分布的随机数,Pbest(t)与gbest(t)分别为当前代个体最优解与全局最优解。
为提高算法的收敛速度,引入式(7)对随机权重ω更新。
式中:ε为随机权重方差;N(0,1)为服从标准状态分布的随机数;rand()为0至1之间服从均匀分布的随机数。
(3)引入麻雀群算法中的随机预警机制,即从种群中随机选择一定比例的粒子作为预警粒子,粒子的更新方式为
式中:α为步长控制参数;k服从-1~1的均匀随机分布;β为极小正数。
由式(8)可以看出,当前粒子若距最优位置较远时,粒子将向最优位置移动;当预警粒子当前位置为全局最优解,粒子会向其他位置移动。由此可以看出,随机预警机制的引入能够极大地降低算法陷入局部解的可能。
SPSO算法运行流程见图1[12]。
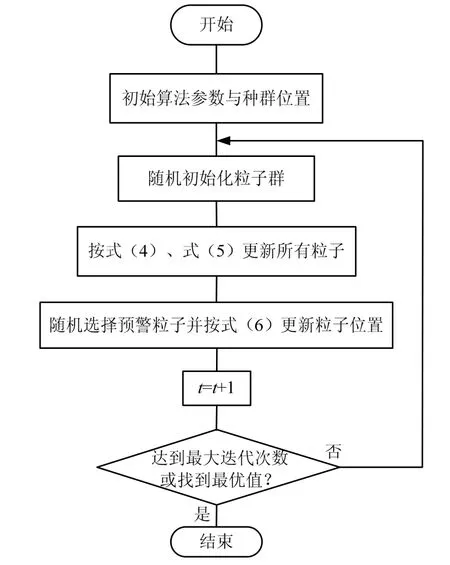
图1 SPSO算法流程Fig.1 SPSO algorithm flow chart
3 仿真验证
为验证SPSO算法在异步电机参数辨识中的有效性,在Simulink中搭建三相异步电机参数辨识模型,见图2。仿真时,对电机施加反向5 N·m的力矩。分别应用PSO算法和SPSO算法对异步电机参数进行辨识,并将两种算法的辨识结果进行对比。异步电机主要参数见表1。
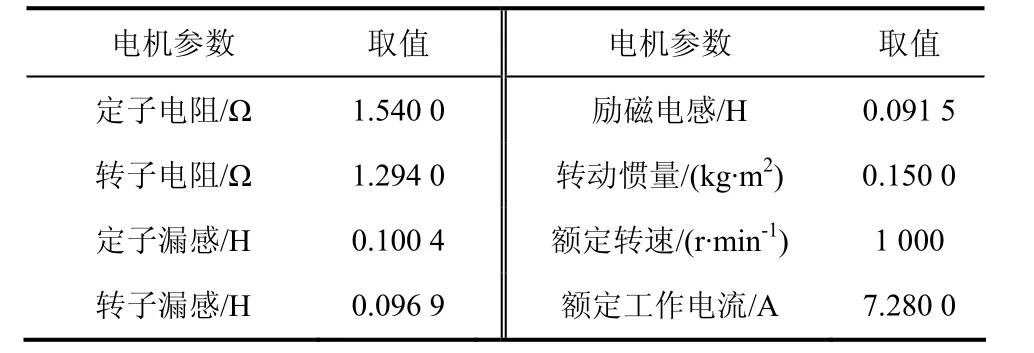
表1 异步电机参数Tab.1 induction motor parameters
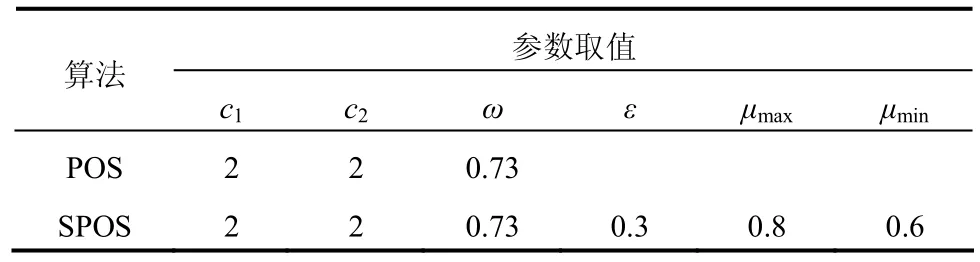
表2 算法参数设置Tab.2 algorithm parameter Settings
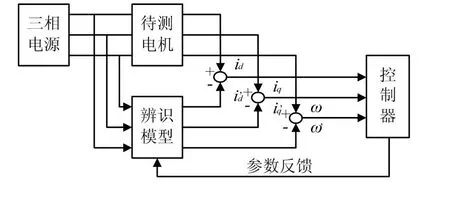
图2 电机参数辨识模型Fig.2 motor parameter identification model
电机定子电阻、电感、转动惯量的辨识结果,见表3,表中数据为辨识20次的平均值。辨识相对误差见表4。

表3 辨识结果Tab.3 identification results

表4 辨识相对误差Tab.4 relative error table of identification
由表3、表4可以看出,与PSO相比,SPSO算法输出误差较小,辨识精度较高。
PSO算法对异步电机参数辨识过程见图3。由图3可知,PSO算法需要进行57次迭代,辨识时间较长,容易陷入局部最优,由粒子位置可以看出辨识结果与实际值也存在较大误差。
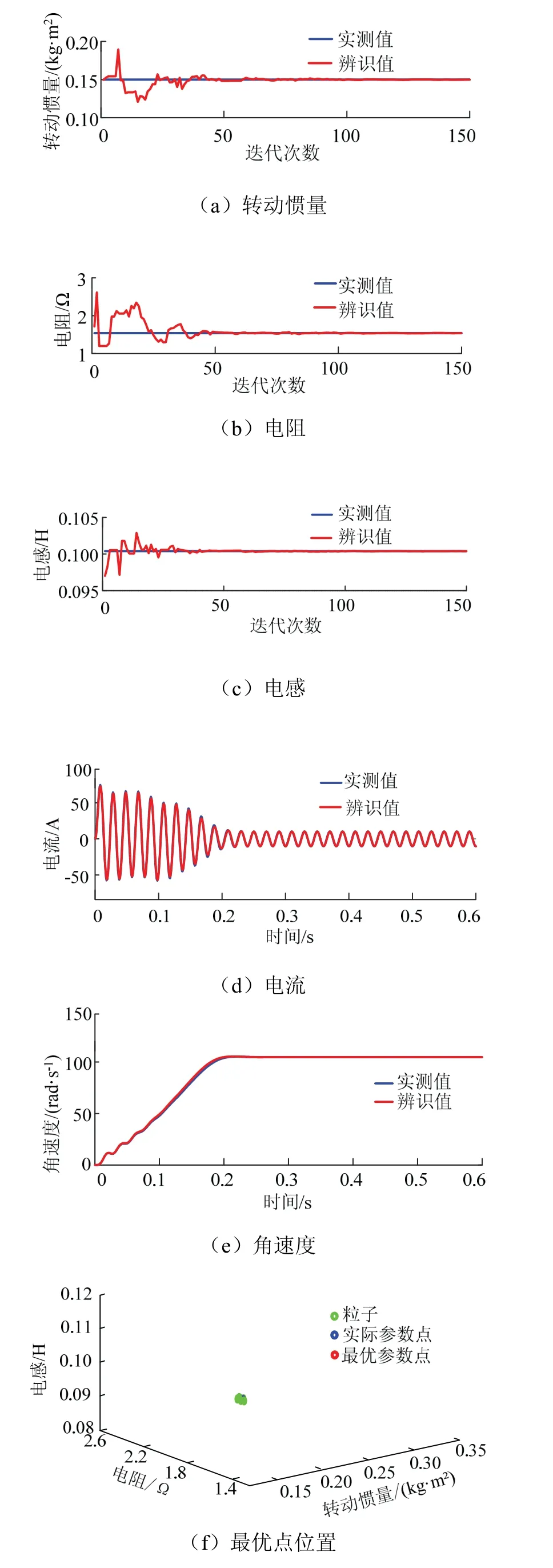
图3 PSO算法辨识结果Fig.3 identification results of PSO algorithm
SPSO算法对异步电机参数辨识过程见图4。由图4可知,SPSO算法仅用26次迭代便实现了收敛。说明引入的随机预警机制可有效避免陷入局部最优;由搜索过程可看出其搜索数值的稳定性优于PSO算法;由粒子位置可直观看出SPSO算法辨识精度较高。
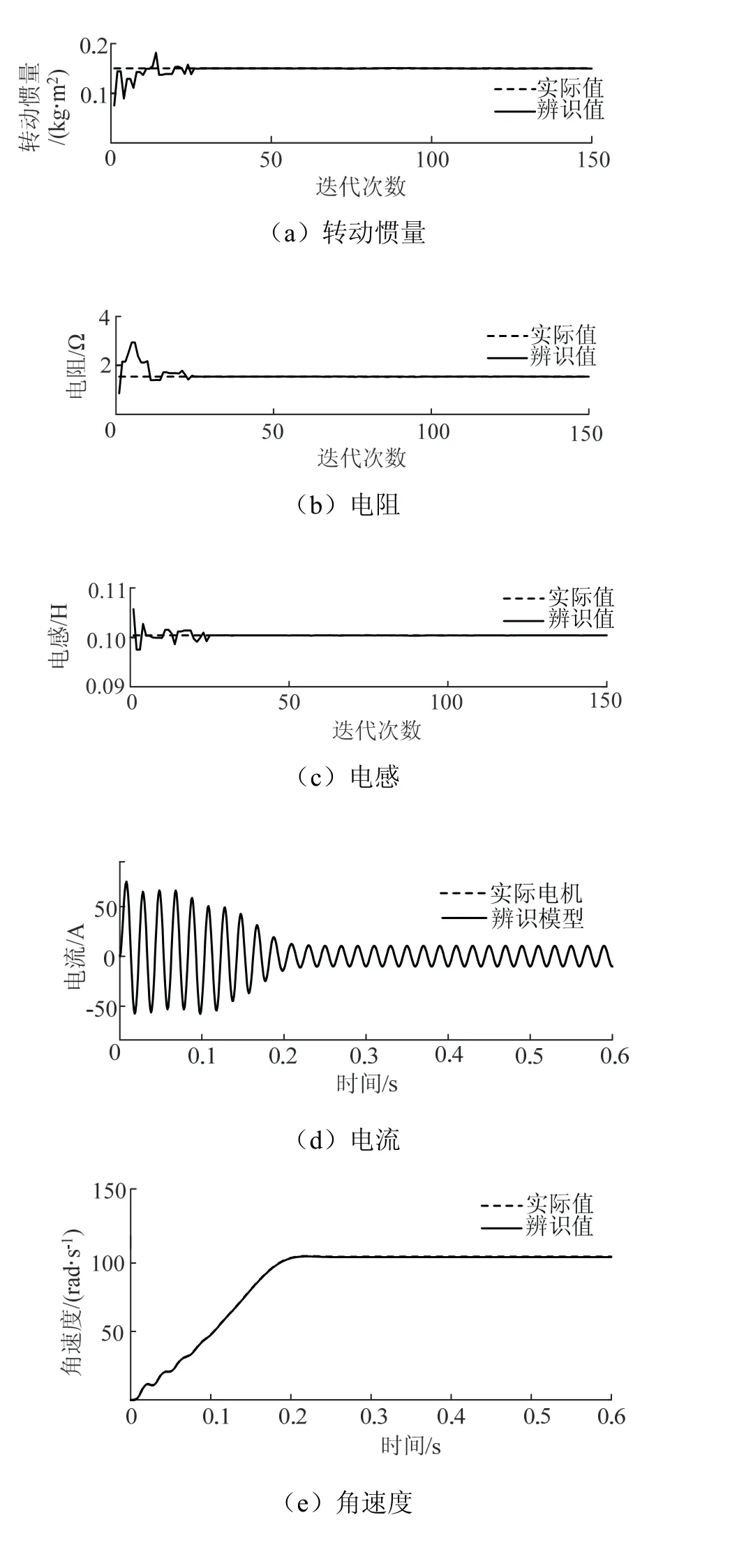
图4 SPSO算法辨识结果Fig.4 identification results of SPSO algorithm
由上述分析可知,SPSO算法比PSO算法收敛速度快,辨识精度较高,验证了SPSO算法在异步电机参数辨识中的有效性。
4 结论
(1)在PSO算法的基础上,引入麻雀群算法中的随机预警机制,提出一种改进的异步电机参数辨识方法——SPSO算法。
(2)在Simulink中搭建异步电机参数辨识模型分别采用PSO算法和SPSO算法对异步电机的转动惯量、电阻、电感、电流、角速度进行辨识,并将辨识结果进行对比分析,结果表明:SPSO算法具有较快的收敛速度和较高的辨识精度。
