基于无人机倾斜摄影测量的大比例尺地形图测制
2023-06-07吴金明
吴金明
(辽宁省检验检测认证中心,辽宁 沈阳 110034)
0 引言
随着数字城市建设的高速发展,对大比例尺地形图的应用及快速更新提出更高的要求。大比例尺地形图数据是指1 ∶2000、1 ∶1000、1 ∶500 比例尺地形图,现阶段广泛应用于城市建设、交通规划、土地确权、国情普查以及地籍调查等多领域[1]。传统的大比例尺地形图测绘采用数字测图技术方法,采用全站仪或RTK 技术进行地物特征点的采集,该方法精度虽然高,但是需要多人配合进行测点及画草图,因此有大量的外业工作量并且在特殊地形区域,如悬崖、陡壁等人工开展测绘工作,危险系数极大[2]。随着无人机技术及计算机技术的发展,无人机在测绘领域应用得越来越广泛。与专业的测绘无人机相比,消费级旋翼无人机具有机动灵活、成本低、低损耗以及可重复的特点。该文将倾斜摄影测量的五组镜头搭载到无人机,搭建无人机倾斜摄影测量平台,对测区范围内进行全方位拍摄,建立区域高分辨率三维模型,制作大比例尺地形图。
1 倾斜摄影测量
1.1 倾斜摄影测量原理
倾斜摄影测量通过5 个镜头从不同的角度对测量区域进行拍摄,获取多角度的区域影像信息。与传统的摄影测量相比,倾斜摄影测量多了4 个角度的拍摄相片,因此可以获取地表区域建筑物和构筑物更丰富的侧面纹理。无人机在5个角度对地面拍摄的同时,机载GPS 和惯性导航系统同时记录飞机在拍摄照片的瞬时位置和姿态组成POS 数据,与地面布设的像控点联测,通过软件直接计算地物间的几何关系,并将最佳的纹理特征贴合到地表,对测区的地形地物重新构建三维模型,获得高精度的实景三维、DOM、点云数据等[3]。
无人机倾斜摄影测量的优势包括以下3 个方面:1)获取信息量大,无人机多个镜头可获取地面的垂直影像,还可获取其他方向的侧面照片。2)遮挡少,与传统的摄影测量相比,对地物可从多个角度观测,极大地减少地物遮挡。3)三维建模自动化程度高,倾斜摄影测量配套数据处理软件较为成熟,可高效、高精度地处理影像数据,自动化处理程度高。
1.2 参数设置
倾斜摄影测量虽然应用与传统的航摄方法不同,但是其基本原理相同,根据摄影测量的方法设置相关参数,对测量成果影响较大。
确定地面采样间隔。地面采样间隔是一个像素对应的地面实际尺寸,也就是影像的地面分辨率。根据要求的测图比例尺大小设置影像地面分辨率采样间隔,地面分辨率大小与测图比例尺大小的对应关系见表1。

表1 影像地面分辨率与测图比例尺的对应关系
1.2.1 航高设置
航高即为无人机的飞行高度,分为绝对航高和相对航高两种,绝对航高是指无人机相对平均海平面的高度,相对航高是指无人机相对测区范围内的平均高程的高度。无人机飞行航高H与镜头参数、地面分辨率之间的关系如图1 所示。
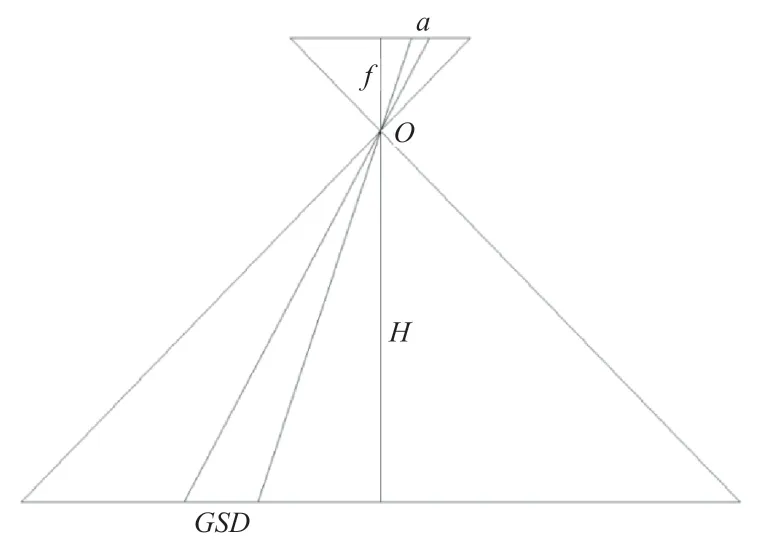
图1 无人机航飞参数关系图
图1 中,H为无人机飞行相对航高,f为精度焦距,a为像元大小,GSD 为地面分辨率,通过图1 中各参数的三角关系,相对航高H的计算表达式如公式(1)所示。
式中:H为相对航高;f为焦距;GSD为地面分辨率;a为像元大小。
1.2.2 影像重叠度
影像重叠度是指拍摄的相邻2 张照片重叠区域的百分比,分为航向重叠度和旁向重叠度2 种。按照摄影测量规范要求,航向重叠度不小于60%,旁向重叠度不小于30%,由于三维模型对地物的纹理拍摄要求较高,因此设置的航向重叠度和旁向重叠度要高很多。
1.3 关键技术
1.3.1 空三测量
空三测量是根据像片间的控制点或者同名点重建影像的几何拓扑关系,采用光束法求解影像的外方位元素,为像片间的精确拼接处理提供高精度参数。空三处理软件的流程如下[4]:1)导入影像软件。2)连接点自动匹配。3)剔除粗差。4)自由网构建。5)导入地面控制点。6)区域网平差。
1.3.2 倾斜影像密集匹配
倾斜摄影影像匹配可以将同一地物的多幅影像获取的信息进行处理,生成高密度的点云数据。当前,常见的倾斜影像匹配算法主要有最小二乘影像匹配算法、多基云多影像匹配算法以及多视立体匹配算法。在完成区域网平差后,通过空三测量获取外方位元素,使用多视角生产匹配高密度点云数据。在匹配数据的过程中,由于从多个角度对同一地物进行观测,因此会产生大量的冗余数据,冗余信息可以用于纠正错误信息,提高点云精度。
1.3.3 数字表面模型
根据点云数据构建不规则三角网,建立高精度的数字表面模型。由于倾斜摄影测量在不同角度获取的地物差异较大并且测区上方有树木遮挡,因此自动建立的数字表面模型会有新的误差。在自动建立高密度的数字表面模型后,采用滤波处理方法融合不同的匹配单元,减少模型误差。
1.3.4 映射纹理
将拍摄的照片正确地附在三维模型上的过程为映射纹理,本质为建立二维照片影像与三维立体间的对应关系,将二维平面的颜色计算到三维模型表面。通常采用的映射方法为正向、逆向映射以及两步映射方法。通过映射纹理,数字表面模型转变为真彩色模型。
2 实施方案
该文采用 Phantom·4 Pro 多旋翼无人机,该无人机为单镜头,可在垂直30°~90°调节镜头角度,可根据测区范围,通过软件计划飞行方案,通过多架次、多角度、多方向获取测区范围内的倾斜摄影数据。Phantom·4·Pro 多旋翼无人机为消费级无人机,相应的数据处理软件倾斜摄影测量工作的工作量,该无人机的相关参数见表2。

表2 Phantom·4·Pro 参数
飞行控制软件选择的是Umap 软件,该软件操作在设计航线时可只需对航高、航向、旁向重叠度和航向重叠度等参数进行设置,可自动解算航线间距和拍摄的时间参数,软件在规划飞行线路后,将自动估算飞行时间,一次电量满足18 min以内的飞行,保证飞机顺利返航。
2.1 技术路线
2.1.1 外业数据采集
外业飞行任务主要分为5 个步骤:1)确定测区范围。2)像控点布设。可在谷歌地球软件上进行设计,布设原则为均匀分布在测区范围内,在布设时,应尽量选择在空旷的、具有明确特征的区域布设,如硬化道路拐角、村民的文化活动广场等区域。3)像控点实地测量。在实地制作地标点过程中,按照事先设计的点位在实地进行部署。采用RTK 技术对部署的点位进行平面控制测量,采用四等水准测量的方法获取高程值。4)开展外业航飞工作。将测区范围及布设的控制点坐标输入umap 飞行控制软件,无人机的航线会现场规划,进行航飞。5)数据整理。航飞工作完成后,将无人机存储的影像信息进行检查,初步查看影像是否完整,检查影像质量。
根据测区的实际情况及测区范围,此次飞行像控点的布设按照航向400 m、旁向400 m 的间隔布设控制点,在测区范围的4 个边线中点位置、4 个角点位置以及测区中心位置共计布设35 个像控点。像控点的平面及高程坐标均采用CORS 系统测量获得。
航飞的高程为970 m,相对航高为310 m,设计的航向重叠度为78%,旁向重叠度设置为70%,设置的摄影基线长度为65 m,航线间距145 m,CGD 为0.7 m。
采用4 种不同密度的像控点对数据进行处理:1)像控点按照航向、旁向均间隔400 m 的距离,共计35 个控制点。2)像控点间距选择为航向和旁向间距均在800 m~1200 m,共计12 个像控点。3)像控点按照航向和旁向像控点间距分别为1200 m 和800 m,共计9 个像控点。4)像控点航向和旁向间距均为1200 m,共计6 个控制点。
精度分析主要分为2 个方面:一是三维模型的精度分析,二是地形图的精度分析。地形图是由三维模型及DOM生产的,因此地形图的精度依赖三维模型的精度。在测区范围内,选择地物特征较为明显的点作为检查点,采用CORS系统获取其平面及高程数据。通过4 种不同的像控点布设方法建立三维模型,在模型上找到同一位置的点坐标作为待检测点,分别计算4 种控制点计算模式下模型的平面和高程精度。
2.1.2 大比例尺地形图制作
采用倾斜摄影测量数据制作大比例尺,主要使用是DOM 数据以及三维模型数据。DOM 数据主要用于地物采集,即通过DOM 数据可直接采集地物的范围线。三维模型数据则用于采集高程线并且在DOM 难以判读地物时,可通过三维模型中的地物高程进一步对地物进行判读。
使用南方CASS 软件进行地物的采集工作。将获取的DOM 数据批量导出CASS 软件中,可采用加载光栅插件批量导入,避免分块导入的缺点。在采集地物的过程中,按照先大后小、先框架后局部的顺序进行采集。首先采集的是道路、桥梁、电力线等线状大范围数据,其次采集居民地设施、墙栅等地物,最后可采集水系、植被等地物。特别值得注意的是,在实际采集过程中有些地物仅从正射影像中难以判读具体地物,可打开三维模型进行查看,进一步确定地物类型。
高程要素的采集。采用EPS 软件进行高程数据的采集。将获取的三维模型数据转为EPS 可读取的Data.dsm 数据格式。在实际采集高程信息时,高程点的采集要贴合地面,不能受到建筑物、植被等具有高度地物的影响。高程点在地形较为复杂的区域采集要密集,在平坦区域采集则可稀疏,在地势变化区域特征位置需要加密高程点采集,如山脊线、山谷边缘线、谷底线以及山丘位置等。
2.1.3 图面整饰
采集地物完成后,将采集的高程点与高程特征线数据插入采集的地物图中,叠加高程与平面数据,通过高程数据构建DTM 三角网,根据地物特征调整三角网,使三角网尽量贴合地表,修整后的三角网可直接生成等高线。将等高线与三维数据叠加,查看是否超出限差要求,将超出限差范围的区域圈画标记,继续调整三角网使其满足要求。等高线的修整不仅要满足限差要求,同时也要满足美观的要求。此外,为了方便后期修图,可以对高程点进行取舍,当采集高程点时,应保证每个格网至少1 个高程点,图中10 cm×10 cm 的范围内至少保留15 个高程点并且特殊位置的高程点应注意采集,如山顶高程点、路口高程点、陡坎高和沟底等位置。
为确保图面美观,需要进行图面整饰。首先,对符号压盖进行调整,出现道路边线压盖房屋、压盖高程点、独立房屋之间靠的太近、不同地物之间出现压盖以及文字注记位置不合适等现象,需要根据图面进行调整。不同图幅需要接边时,也需要仔细对图面进行调整,使其在满足精度要求的同时满足图面美观要求。图2 为通过倾斜摄影测量数据经过地物采集、高程采集以及图面整饰形成的局部地形图。

图2 局部整饰地形图
3 精度评定
三维模型精度评定的过程中,通过CORS 系统采集的地物点平面坐标可直接用于平面精度评定。将地形图中15 个对应的地物点坐标与实测地物点坐标进行对比,结果见表3。

表3 实测值与矢量值差值表
对表3 进行分析,实测点与矢量点平面坐标差值分布较为均匀,在0.22 m 范围内,平面中误差最大值为0.129 m,平面坐标限差小于航测对1 ∶500 比例尺地形图中平面限差0.3 m 的要求。
将等高线高程中误差进行评定,采用地形图中的等高线高程与航飞布设的高程点进行对比,结果见表4。

表4 高程中误差对比结果
表4 共计选取35 个点计算高程差值,得出实测值与地形图等高线差值最大值为0.252 m,计算高程中误差为±0.158 m,符合航测规范中对1 ∶1000 比例尺地形图高程中误差的限差要求。
4 结论
该文采用消费机单镜头旋翼无人机对测区开展倾斜摄影测量工作,对倾斜摄影测量的基本原理及参数关系进行阐述,并对倾斜摄影测量建立三维模型的关键技术进行分析。通过实例,获取倾斜摄影测量数据,建立测区三维模型,并根据DOM 采集地物要素数据,根据三维模型获取高程要素数据,通过地物数据的平面坐标分析与等高线的高程坐标分析,结果表明,地形图的精度满足测量规范要求。通过倾斜摄影测量获取地形图提高工作效率,减少外业工作量,为后续大规模地形图的测制和更新提供参考。