一种低轨通信卫星单天线馈电链路切换方法
2023-05-31窦宏浩章雷徐良贝超李常亮杨彪张世杰刘丽
窦宏浩 章雷 徐良 贝超 李常亮 杨彪 张世杰 刘丽
(航天科工空间工程发展有限公司,北京 100854)
低轨通信卫星星座网络作为空间信息传输骨干网,具备广域覆盖、可靠传输等特点,是重要的战略基础设施,低轨卫星互联网是低轨通信卫星网络的重要组成部分[1]。在低轨卫星互联网星座系统中,卫星与用户终端的通信链路构成用户接入网,与分布在不同区域的地面信关站的通信链路构成馈电承载网。其中,馈电链路作为卫星与地面信关站之间高速传输通道,担负着星上用户数据、星间数据、随路测控数据等业务与地面网络交互的责任,馈电链路连续、稳定地通信[2],是星上各种业务实时、高速地接入地面互联网络的重要保障。
低轨互联网卫星沿着固定轨道高速飞行过程中,卫星与信关站之间的相对位置不断变化,通过调整馈电天线波束指向,保证在飞行过程中馈电波束持续指向地面信关站,从而实现馈电链路持续通信。卫星与信关站的可通信时长与轨道高度、馈电波束可调整范围,以及信关站最小通信仰角有关,轨道高度为500~1200km的低轨卫星与一个信关站的馈电通信时长一般为6~13min。为了增加馈电链路通信时长,通常会在地面建立多个信关站,形成一个由多个卫星和信关站构成的馈电链路承载网,卫星在轨飞行过程中通过馈电链路在不同信关站之间切换实现馈电业务持续传输。
目前馈电天线有相控阵天线、反射面天线、喇叭天线等多种形式,综合考虑馈电天线的研制成本、指向精度、天线增益、质量、功耗等多重因素,反射面天线具有明显优势,国内外大多数在轨卫星都采用反射面天线作为馈电天线,如OneWeb卫星、Starlink卫星等[3-4]。
星地馈电链路的波束调整需要通过控制伺服电机驱动反射面天线来实现,该过程存在机械运动,需要一定转动时间[5]。当卫星需进行馈电链路切换时,馈电天线需要旋转较大角度范围指向几百至数千千米外的下一个信关站,天线旋转时间较长,无法保证馈电链路不中断。为了解决该问题,传统方法采用星上配置两副馈电天线,通过双馈电天线进行接力切换。
双馈电天线同一时刻仅使用其中一副,使用率只有50%,且我国地面信关站基本均部署于国境内,卫星大多数飞行弧段无信关站可通信,馈电天线处于停止工作状态,实际使用率远不足50%,使用率低。卫星配置双馈电天线后,将会增大馈电载荷电磁兼容性、散热、控制等设计难度以及质量、功耗代价,同时也会增加卫星研制成本和整星复杂度。为了降低卫星成本,减重是一个主要途径,通过载荷平台融合设计、星地联合优化设计等多种方法都可实现减重降成本。“铱星”卫星通信系统在设计时采用了当时成本较高的星间链路组网方案,每颗卫星均配有星间链路载荷,这就导致了“铱星”较高的卫星成本。而后来的“全球星”卫星通信系统就充分识别了“铱星”的这一成本问题,取消了星间链路载荷。通过星地联合优化设计,“全球星”系统在地面部署了大量关口站,每个关口站同时可与3颗卫星建立通信,保证卫星在没有星间链路的情况下也能时刻与地面关口站连接通信,进行业务传输,同时又实现了对卫星的减重降成本[6]。
综上所述,对于透明转发卫星和无星间链路卫星,如OneWeb卫星、Starlink(v1.0/v1.5)卫星等,传统双馈电天线接力切换是保证馈电连续通信的有效手段。对于当前正在快速发展与建设的具有星上处理和星间链路的低轨互联网卫星,本文通过分析传统双馈电天线接力切换所带来的弊端,并结合星上高速路由交换转发服务与星座网络特性,设计了一种适用于低轨互联网卫星的基于星上路由策略的单馈电天线切换方法,该方法在保证馈电链路切换过程中业务传输不中断的同时,将星座中所有卫星馈电链路组成的馈电承载网进行统筹使用,实现网络优化,有效降低馈电载荷设计和卫星设计难度、成本及代价[7-9]。
1 典型场景分析
低轨卫星互联网星座系统为实现全球无缝覆盖,满足用户随时随地接入需求,星座一般由多个轨道面及每个轨道面内的多颗卫星组成。同一轨道面内的前后两颗相邻卫星以及相邻轨道面间的卫星通过星间链路组网,组成一个网格状网络。在任一时刻,星座中均会有多颗卫星与不同地面信关站建立馈电链路。典型低轨卫星互联网星座参数配置如表1所示,后续场景讨论与仿真均以此场景为基础展开分析。

表1 仿真参数配置表Teble 1 Simulation parameters
当卫星即将飞出当前信关站覆盖范围,达到馈电通信最小仰角限值时,需要断开与当前信关站链路,并切换至规划的下一个信关站,典型馈电切换场景如图1所示。
图1中示例的切换卫星由西向东飞行,当前已与喀什信关站建立馈电链路,在飞到切换弧段后断开与喀什信关站的链路(如图中灰色链路),并建立与西安信关站的馈电链路(如图中桔色链路),完成一次馈电链路切换。
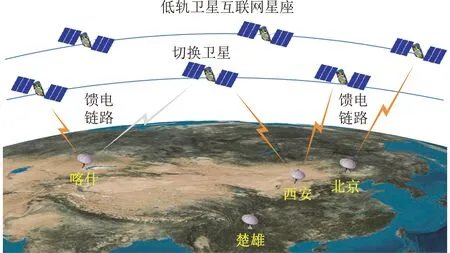
图1 低轨互联网卫星馈电链路切换场景Fig.1 Handover scene of LEO internet satellite feeder link
2 基于路由策略的单馈电天线切换
一个馈电天线在不同地面信关站之间进行馈电链路切换时,需要通过伺服电机旋转馈电天线波束指向角度,不能立即与下一个信关站建立馈电链路,所以在单个馈电天线旋转时会产生馈电链路中断。为了避免馈电天线旋转时对馈电业务传输产生影响,馈电业务传输需要与星上路由策略相结合,在馈电天线旋转时长内通过星间链路将业务发送至已建立馈电链路的相邻卫星,再由相邻卫星的馈电链路提供服务,继而保证馈电业务传输不中断,实现无缝切换。馈电天线旋转角度切换如图2所示。

图2 馈电天线旋转示意图Fig.2 One feeder antenna revolved diagram
2.1 馈电天线旋转时长分析
馈电天线的波束指向从原信关站调整到需要切换的下一个信关站过程中,馈电天线不断旋转,所需旋转时间由馈电天线伺服电机的角加速度、角速度和旋转角度三者共同决定。以馈电天线方位角旋转为例,伺服电机的角速度为ωAZ,角加速度为αAZ,方位向旋转角度为θAZ。
1)方位向初始加速旋转时间
(1)
2)方位向匀速旋转时间
(2)
式中:ΔθAZ为相对于开始旋转时刻θAZ的变化量,由于旋转过程中卫星一直飞行导致的方位向旋转角度产生变化。
3)方位角旋转需要的总时间
(3)
俯仰角伺服电机旋转需要的总时间为
(4)
式中:tEL,1为俯仰向初始加速旋转时间;tEL,2为俯仰向匀速旋转时间;ωEL为俯仰角伺服电机的角速度;αEL为角加速度;θEL为俯仰向旋转角度;ΔθEL为相对于开始旋转时刻θEL的变化量。
由于方位向和俯仰向伺服电机为同时旋转,所以馈电天线旋转总时长为伺服电机在方位和俯仰两个方向旋转时长的最大值,即
Tinter=max{TAZ,TEL}
(5)
2.2 天线切换过程
为实现单馈电天线在时长为Tinter的天线旋转期内馈电业务传输不中断,星上路由交换策略设计需与馈电天线切换的任务规划相结合,通过两者配合完成一次切换过程。
卫星与当前已建立馈电链路的信关站何时断开连接,并与下一个信关站建立馈电链路是通过规划提前已知的。根据该已知信息,星上路由器可提前调整转发路径,将馈电业务路由转发至其它已建立馈电链路的相邻卫星并通过信关站落地,在馈电切换完成后再次调整业务转发路径,使馈电业务再从本星落地信关站。
假设卫星已建立馈电链路的信关站设为A,目标切换信关站设为B,两站同时处于馈电天线覆盖范围内的任意时刻,馈电链路都可进行切换。根据任务规划,馈电链路的切换时刻为TAB,则卫星在TAB时刻与信关站A断开连接,在TAB+Tinter时刻与信关站B可建立链路,Tinter为根据式(5)计算得到的馈电天线旋转时长。
单馈电天线切换过程中,在TAB-Δt时刻,由星上路由停止向馈电端口发送数据,并根据星上路由协议提前计算的转发路径将馈电业务通过星间链路发送至当前已建立馈电链路的其他卫星落定信关站。其中Δt为切换时刻的提前量,主要用于在Δt时间内发送完毕已在路由交换队列中排队的馈电业务分组,以及在馈电基带处理中缓存的业务分组,保证在天线切换时已无数据分组需要由当前馈电链路发送,实现切换过程数据丢包率为零。提前量Δt的时间长短与路由交换队列长度、馈电基带处理缓存大小、馈电传输速率有关,一般提前数毫秒即可,需满足
Rf×Δt≥(Qr+Bf)
(6)
式中:为Rf馈电传输速率;Δt为切换提前量;Qr为路由交换队列长度;Bf为馈电基带缓存容量。
2.3 路由转发策略
星上路由协议一般分为静态路由协议和动态路由协议两种。静态路由协议由地面运控中心根据当前网络拓扑切片、节点类型组成、业务服务质量(QoS)需求、链路拥塞状态等多要素计算静态路由表,并通过馈电链路或测控链路上注至星上路由器[10]。动态路由协议由星上路由器自主计算,通过星间链路与相邻卫星节点及全网卫星节点交互状态信息、端口信息、链路信息等协议信令内容,实现节点入网、退网自主检测,动态维护网络拓扑变化,根据实时交互信息计算全网路由表。
若星上采用静态路由协议,则需地面运控中心提前规划好切换期间的馈电业务路由转发策略并上注至星上路由器。该策略的基本思想是在馈电切换期间,选择相邻最近的、且有馈电链路的卫星进行本星馈电业务落地[11]。按照馈电切换规划,星上路由器在TAB-Δt时刻停止向馈电端口发送业务数据,同时在路由表中选择切换期间的馈电业务路由转发条目,并按此条目通过星间链路发送馈电业务。
若星上采用动态路由协议,则根据动态路由算法,星上路由协议在TAB-Δt之前自主计算完毕切换期间通过星间链路转发的馈电业务路由条目,并保存在路由表中。计算路由条目的基本思想与静态路由协议一致,且在此基础上可综合考虑星间链路负载、相邻卫星馈电链路负载等因素,动态计算最优路径。在TAB-Δt时刻自动选择该路由条目转发馈电业务。
地面信关站需要经馈电链路上行的业务数据也需选择与星上一致的相邻卫星馈电链路发送,再通过星间链路转发至该卫星,地面信关站的切换时刻需要与卫星保持一致。
在TAB+Tinter时刻,馈电天线波束指向已对准下一个信关站,并建立馈电链路后,星上路由器再次调整馈电业务转发路由。若为静态路由协议,则按照切换后的路由条目转发;若为动态路由协议,则在检测到馈电链路可用后,根据协议算法重新自主计算馈电业务路由条目并调整转发端口发送馈电业务。至此,一次基于星上路由策略的单馈电天线切换过程完成,切换流程如图3所示。
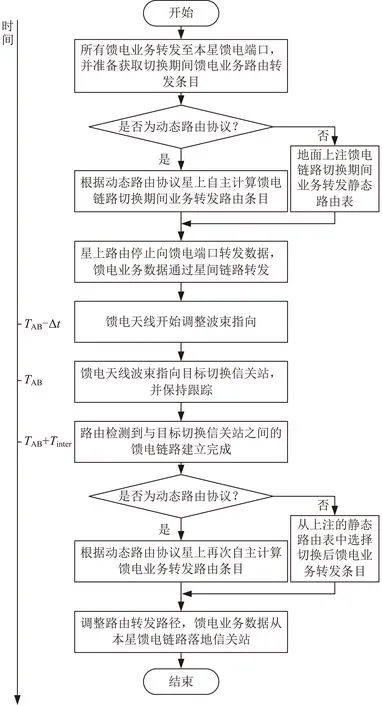
图3 单馈电天线切换流程Fig.3 Single-feeder link antenna handover process
单馈电天线切换方法对于星上路由协议设计的复杂度略有增加,仅需要根据上述切换流程,在TAB-Δt和TAB+Tinter时刻增加调整馈电业务转发路由的处理流程即可,其余路由协议的算法和处理流程均无需改变,所以该路由策略可以融入多种路由协议中,有较强适用性。
在低轨卫星互联网星座系统中,全网同时会有多颗卫星与地面信关站建立连接。在如图4所示星座中,卫星1、卫星2与信关站A之间存在馈电链路,卫星4与信关站B之间存在馈电链路。卫星3处于从信关站A向信关站B切换过程中,虽然本星馈电链路中断,但馈电业务可经星间链路从卫星4(或卫星2)的馈电链路传输,保证业务传输不中断。
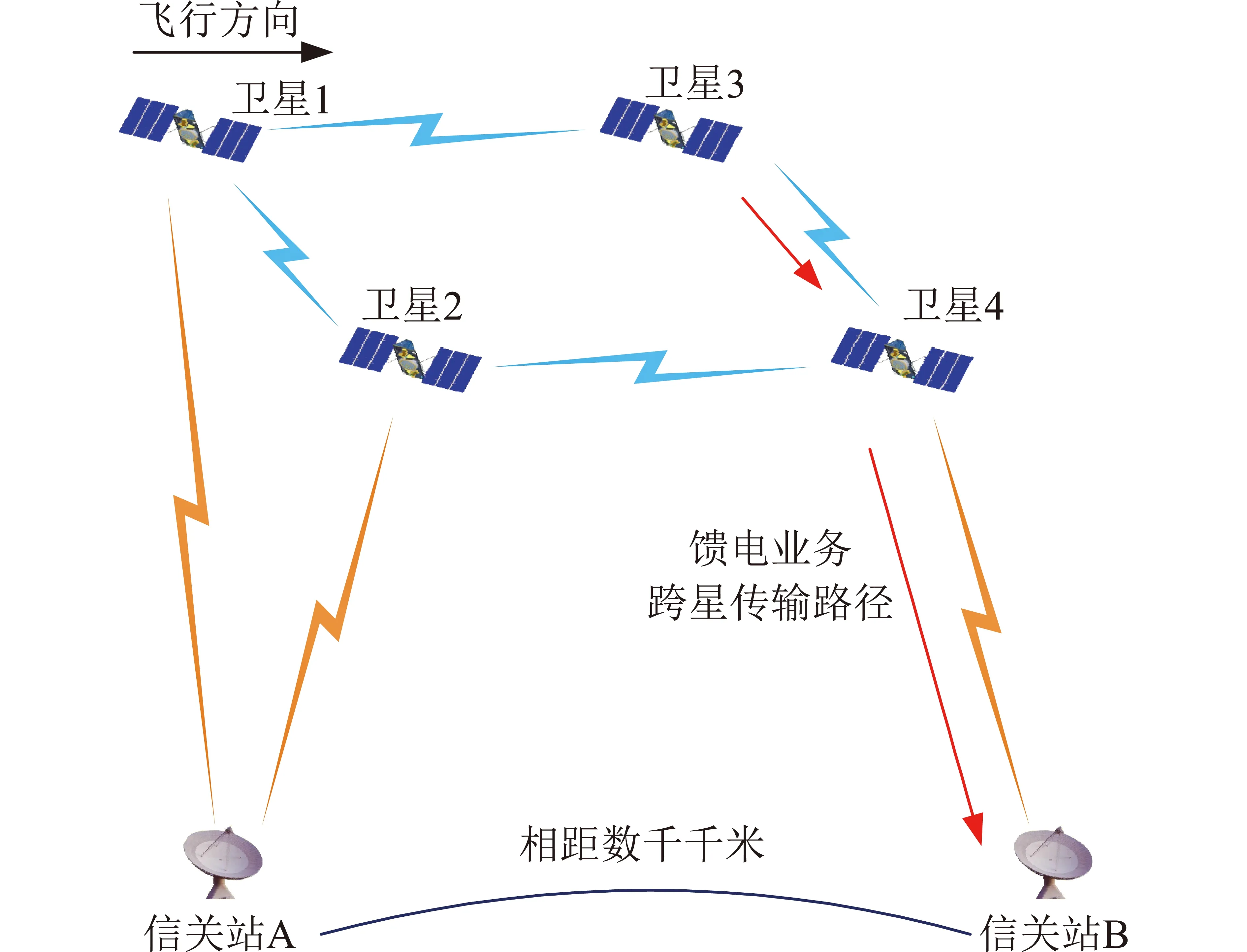
图4 馈电链路网络连通示意图Fig.4 Feeder link network diagram
3 效能分析
3.1 仿真场景
使用仿真工具软件STK构建低轨卫星互联网星座,配置Walker星座构型、馈电天线覆盖范围、地面信关站部署位置、最小通信仰角、馈电天线伺服转动性能等关键参数,仿真场景如图5所示。
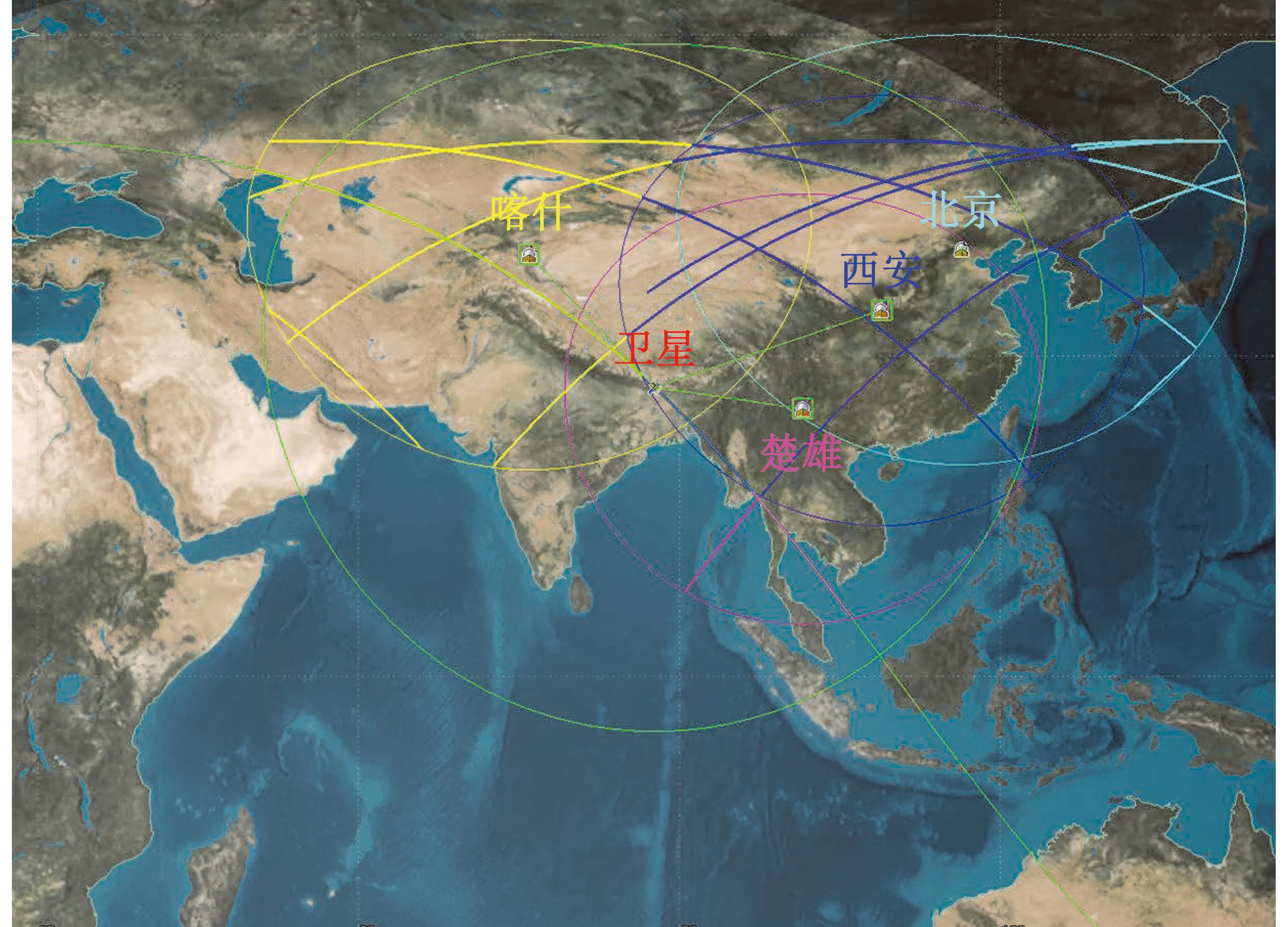
图5 仿真场景示意图Fig.5 Simulation scene
图5中黄、红、蓝、青4种颜色分别代表喀什、楚雄、西安、北京4个信关站的覆盖区域和卫星过境可建立馈电链路的飞行弧段。
通过建模仿真馈电链路切换时长、业务传输时延、卫星与信关站的“双连通”时长、天线使用率等关键指标,分析基于路由策略的单馈电天线切换方案使用效能。
3.2 切换时长分析
馈电链路在两个信关站之间切换时,需要卫星同时对两个信关站可见,满足“双连通”条件。以馈电链路从喀什站向西安站切换为例进行分析,在仿真的60轨中,每轨与两站“双连通”时长约为1.75~5.57min,如图6所示。
随着卫星在轨高速飞行,在“双连通”期间的不同时刻进行馈电链路切换,馈电天线所需要旋转的角度不同。以图6中的典型圈次14~18进行分析,这5个圈次馈电天线在不同时刻方位和俯仰两个方向需要调整的角度如图7所示。
根据式(5)可知,馈电天线旋转所需的时长取决于在俯仰向和方位向旋转的最长时。通过对30天400轨进行仿真分析,俯仰向旋转角度范围为87.16°~108.76°,方位向旋转角度为0.06°~91.85°,且俯仰向旋转角度总是大于方位向旋转角度。按照俯仰角伺服电机和方位角伺服电机的角速度和角加速度相同,取角速度ω=±1(°)/s,角加速度为α=±0.6(°)/s计算,代入式(5)可得,馈电天线旋转需要的时长为84.99~112.58s,即单馈电天线链路切换最长需要112.58s,在此期间馈电业务需要星上路由交换到相邻卫星的馈电落地信关站。
3.3 业务传输时延影响
馈电业务传输总时延主要与业务传播时延及业务传输处理时延有关,在没有业务拥塞的情况下,处理时延一般为微秒级,相对于空间传播时延可以忽略。
单馈电天线切换相比于双馈电天线切换,增加了星间链路传输,业务传输时延也相应增大。通过仿真分析,当一颗卫星进行切换时,其相邻的4颗卫星中至少有一颗卫星存在馈电链路,所以采用单馈电天线切换金会增加一跳星间链路传输时延。仿真构建的星座中,同轨星间距离为3068km,异轨星间距离为97.2~2457.6km,增加的最大传输时延为0.4~10.2ms。采用单馈电天线和双馈电天线传输,业务从喀什信关站切换至西安信关站的总传输时延仿真对比结果如图8所示。
图8中蓝色曲线是单馈电天线传输时延仿真结果,红色曲线是双馈电天线传输时延仿仿真结果。卫星在T0时刻与喀什信关站建立馈电链路开始传输业务,随着通信仰角逐渐变大,传输距离缩短,时延变小,过顶后仰角又逐渐变小,传输距离增加,时延变大。在T0至TAB-Δt时间段,馈电链路始终保持与喀什信关站通信,单、双馈电天线传输时延一致,红、蓝曲线重合。
在TAB-Δt时刻馈电开始从喀信关站向西安信关站切换,单馈电天线的馈电业务切换至相邻卫星落地,增加星间传输,业务传输时延跳跃增大;双馈电天线由于提前已经将另一副天线指向西安信关站,所以实现“瞬时”切换,但由于相比于喀什信关站,卫星此时距离西安信关站较远,所以业务传输时延同样跳跃增大,但因没有星间传输,时延无单馈电天线长。
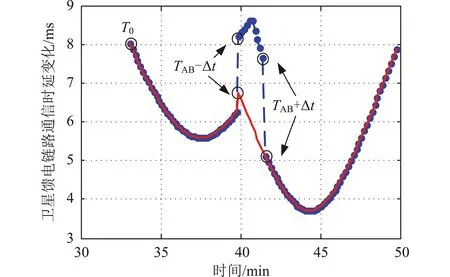
图8 馈电业务传输时延Fig.8 Delay time of feeder link transmission
在TAB+ΔT时刻,单馈电天线已旋转到位,指向西安信关站,并建立链路,此时馈电业务可从本星馈电链路落地,传输时延跳跃减小与双馈电天线一致,时延曲线再次重合。
3.4 馈电链路连通时长
当地面信关站最小通信仰角≥15°,且卫星馈电天线指向≤±58°时,即认为卫星与信关站可建立馈电链路进行通信。通过对构建的Walker星座进行1个月仿真分析,在统计的400轨中,有235轨卫星与信关站可连通,165轨不可连通。在一个轨道圈次中,卫星与信关站连通最长时间为21.85min,平均时间为17.61min。考虑所有圈次(包含不可连通圈次)的每轨平均连通时长为10.35min,其中60轨的仿真结果如图9所示。
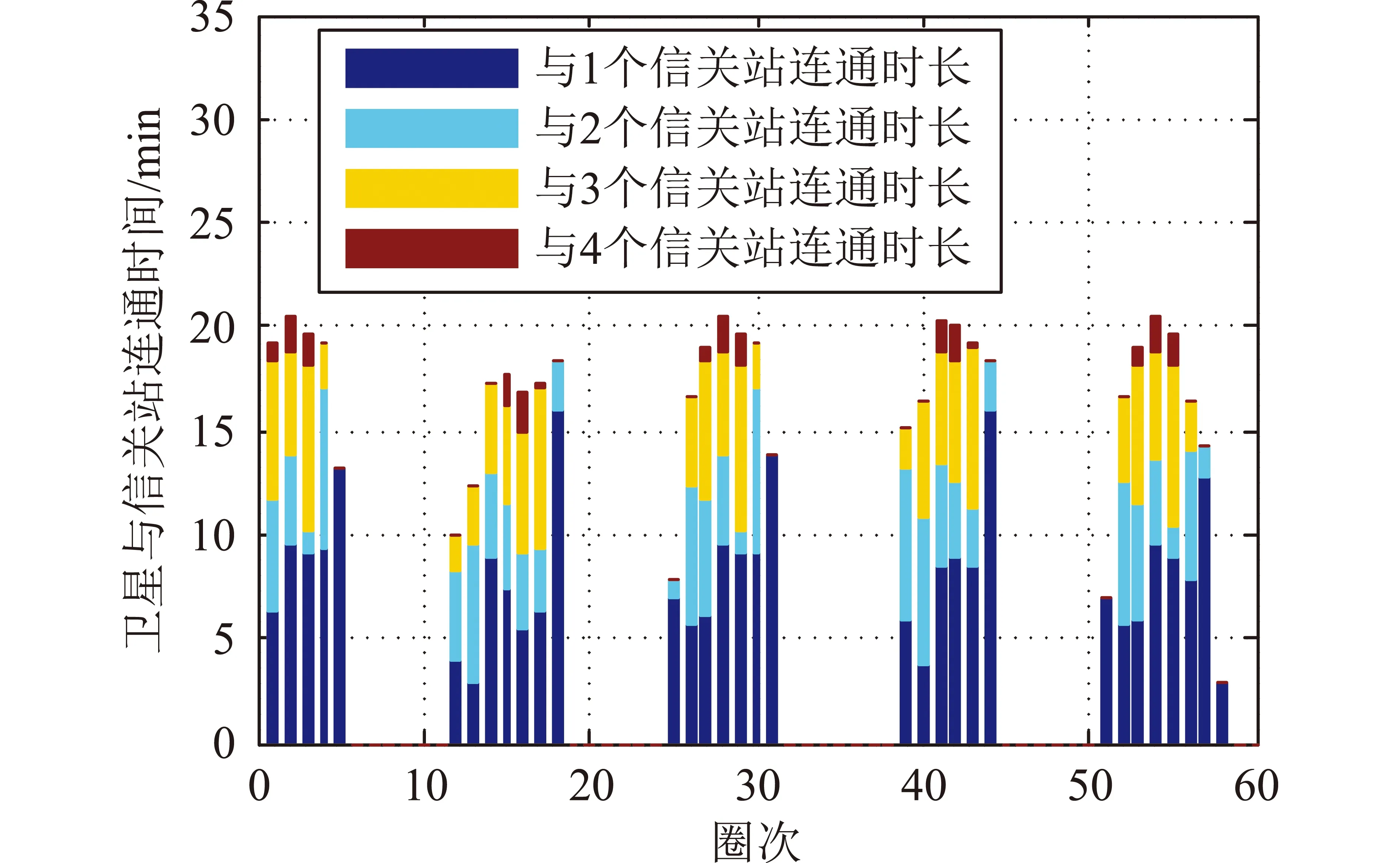
图9 卫星与信关站连通时长Fig.9 Communication time between satellite and gateway
卫星轨道高度为1100km的轨道周期为107.26min,按平均每轨与信关站连通10.35min计算,单馈电天线切换方法馈电天线的平均使用率为为9.65%,而双馈电天线切换方法每副天线的平均使用率仅为4.82%,使用率降低一半。
4 效能对比
低轨互联网卫星采用传统双馈电天线进行信关站接力切换时,需额外配置一个反射面天线、两个负责方位角和俯仰角转向的伺服电机、天线连杆、配套波导及线缆等,在载荷质量、功耗、成本以及卫星设计复杂度等方面都付出较大代价。一个轨道高度为1100km的互联网卫星,额外增加的质量约8.4kg,以300颗卫星的星座规模计算,总质量增加2520kg,卫星研制成本及火箭发射成本都因此会同步增加。
采用单馈电天线对切换方法进行优化后,由于只有一副馈电天线,可直接节省以上代价。同时对卫星结构布局约束要求降低,更有利于卫星整体优化设计。从卫星可靠性角度分析,相比于双馈电天线,采用单馈电天线的卫星可靠性会略有降低。如果馈电天线发生故障,则馈电业务将无法从该卫星直接落地。但低轨卫星互联网是一个星座系统,一般具有4条星间链路,在馈电天线发生故障后,馈电业务可通过星间链路由相邻卫星的馈电链路落地,星间链路起到了对馈电链路的多重备份功能。所以,从星座网络系统的角度分析,采用单馈电天线的设计不会影响整个星座系统的可靠性。两种切换方案主要优缺点对比如表2所示。
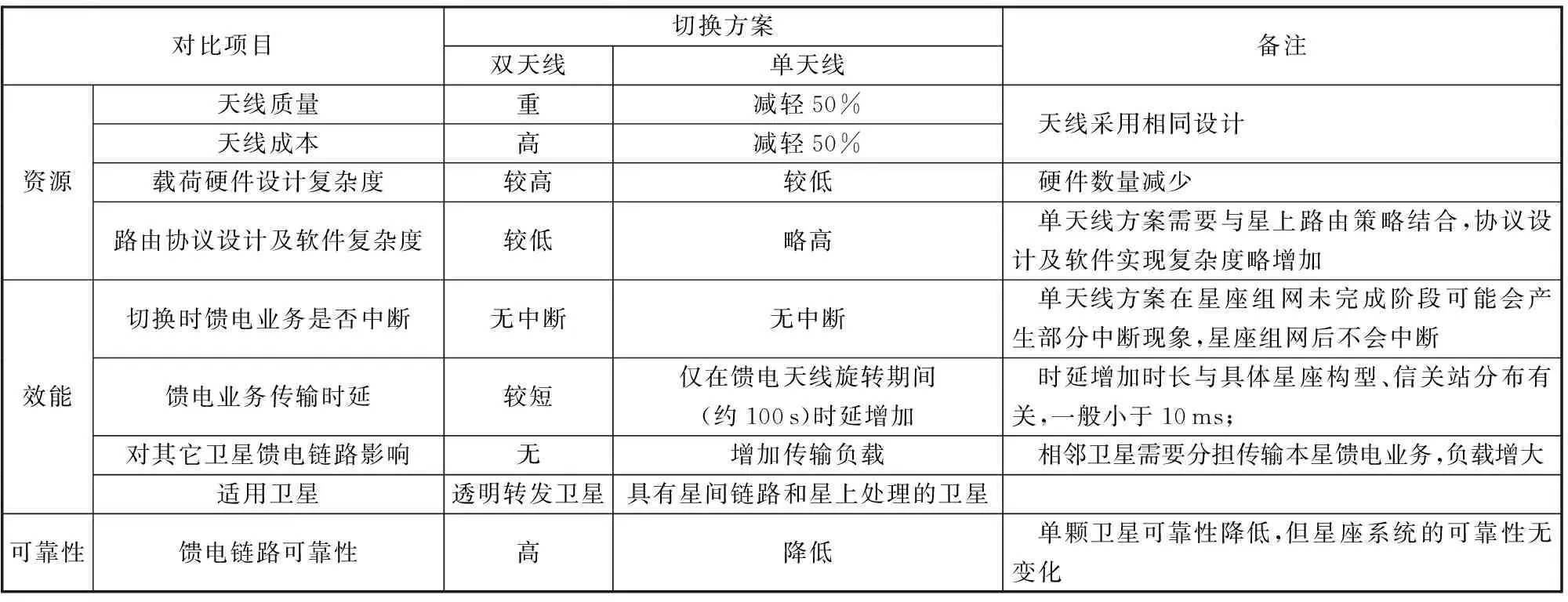
表2 两种切换方案对比表Teble 2 Comparison of two switching methods
5 结束语
为适应低轨卫星互联网星座系统快速建设、快速组网、快速使用的需求,本文提出了一种基于路由策略的低轨互联网卫星馈电链路切换优化方法,通过一副馈电天线实现与地面信关站进行链路切换时馈电业务传输不中断。同时,与传统双馈电天线接力切换相比,具有馈电载荷质量轻、天线运动包络小、使用率高、功耗低、设计难度小、对卫星布局要求低等优点,达到了馈电载荷设计、卫星总体设计、星座网络设计三个层面联合优化,为解决低轨互联网卫星轻量化、低成本设计问题提供了一条行之有效的路径,对于我国大规模低轨卫星互联网星座建设具有借鉴意义。