旋转式星载辐射计动平衡影响分析
2023-05-31高一丹叶志彪黄佳雷于爽金旭鑫何嘉恺翁艺航
高一丹 叶志彪 黄佳雷 于爽 金旭鑫 何嘉恺 翁艺航
(1上海航天电子技术研究所,上海 201109) (2上海宇航系统工程研究所,上海 201109)
星载辐射计按其结构形式一般分为非旋转式星载辐射计和旋转式星载辐射计,随着卫星探测功能的多样化发展,旋转式星载辐射计依托其探测范围广、应用场景多等特点在卫星领域中使用越来越多。旋转式星载辐射计作为卫星在轨探测的有效载荷产品,集大气、海洋、陆地和环境观测于一体,能够进行全天时、全天候全球微波辐射信息遥感监测,可以获取风场、降水、土壤水分、海冰、海表温度、积雪、温度廓线、湿度廓线等相关信息,具有大范围、全球化;多要素、全天候;高时效,高精度等优势。可为天气预测、暴雨诊断、环境监测以及气候研究等提供有效的数据支撑。在气象探测、防灾减灾、保证航空、航海安全等应用领域,具有重大的经济效益、社会效益和军事效益[1]。
随着国家气象局对卫星在轨探测精度的要求越来越高,卫星在轨运行的姿态稳定度也大幅提高。旋转式星载辐射计作为卫星的主载荷产品,具有系统结构复杂、活动部件关节多、在轨通过扫描转动实现对地探测等特点,其在轨扫描转动时极易对卫星的姿态稳定产生干扰[2],影响卫星的姿态稳定度,严重的甚至会造成卫星在轨倾覆,带来不可估量的损失[3],旋转式星载辐射计动平衡状态的稳定性对卫星在轨探测的姿态稳定具有十分重要的作用[4]。因此,需要对旋转式星载辐射计进行动平衡设计[5],同时进行地面动平衡配平或在轨动平衡控制,使得旋转式星载辐射计扫描转动时的动不平衡量较小,提高卫星的姿态稳定度[6]。
本文介绍了旋转式星载辐射计的组成,根据动平衡理论对旋转式星载辐射计进行了动平衡特性分析,分析了转动体升降、天线收拢展开对动平衡的影响;然后根据动平衡特性分析结果对旋转式星载辐射计进行了天线展开机构设计改进和动平衡试验方法优化;最后对改进后旋转式星载辐射计动平衡状态的稳定性进行了试验验证。
1 旋转式星载辐射计组成
本文设计的旋转式星载辐射计主要由星体安装架、筒体、扫描驱动机构、天线展开机构、天线反射器、遮光罩等组成。为满足运载火箭整流罩的包络要求,卫星发射时,旋转式星载辐射计收拢锁紧安装于卫星顶部。卫星发射入轨后,旋转式星载辐射计天线及展开机构展开、转动体解锁下降到位,随后扫描驱动机构启动周期性连续扫描转动,旋转式星载辐射计进入在轨工作模式,旋转式星载辐射计收拢锁紧状态、解锁展开状态如图1所示。
为实现在轨工作状态下旋转式星载辐射计天线反射器对地面的全方位探测,旋转式星载辐射计采用扫描驱动机构驱动转动体绕着转轴360°周期性连续旋转扫描的工作方式。其中,转动体质量约为125kg,包含筒体、天线展开机构、天线等。图1中,星体安装架为旋转式星载辐射计安装底座,安装在卫星上固定不动;扫描驱动机构底座安装在星体安装架上固定不动,筒体、天线展开机构、天线等转动部分安装在扫描驱动机构上部的转子法兰上;遮光罩直接安装在星体安装架上固定不动。该旋转式星载辐射计在轨展开工作时,扫描驱动机构转子驱动筒体、天线展开机构、天线等绕转轴转动,实现对地观测。
旋转式星载辐射计系统结构复杂、活动部件多,特别是转动体升降、天线收拢展开等大质量活动部件的运动对旋转式星载辐射计动平衡状态的稳定性会带来相应的影响。旋转式星载辐射计动平衡影响因素多、动平衡状态控制更加复杂,需对其动平衡特性及动平衡影响进行相应的研究与分析,以确保其动平衡状态的稳定性。
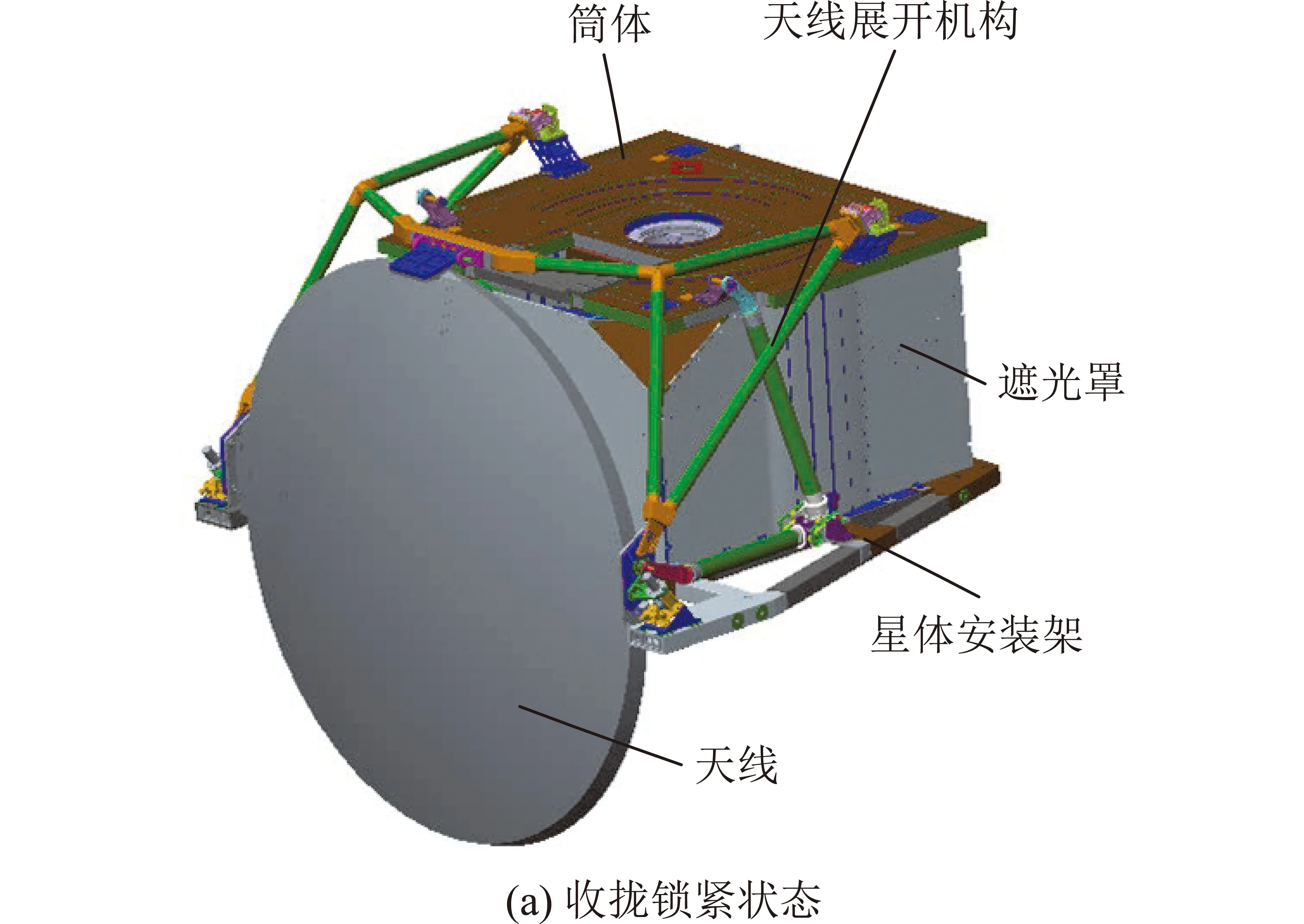
图1 旋转式星载辐射计Fig.1 Operational state of rotary space-borne radiometer
2 旋转式星载辐射计动平衡特性及分析
2.1 动平衡理论
动平衡配平选择“双平面法”,动平衡原理示意如图2所示。在转轴上距离安装面c处放置力传感器,设第一配平面到力传感器的距离为a;第二配平面到力传感器的距离为b;安装面到力传感器的距离为d;m1、m2分别为第一配平面、第二配平面上等效集中质量;r1、r2为质量块的回转半径;F1、F2分别为质量块m1、m2受到的离心力;Zc为质心到安装面的距离,当转子以角速度ω转动时,该点受力的向量表达式如式(1)。
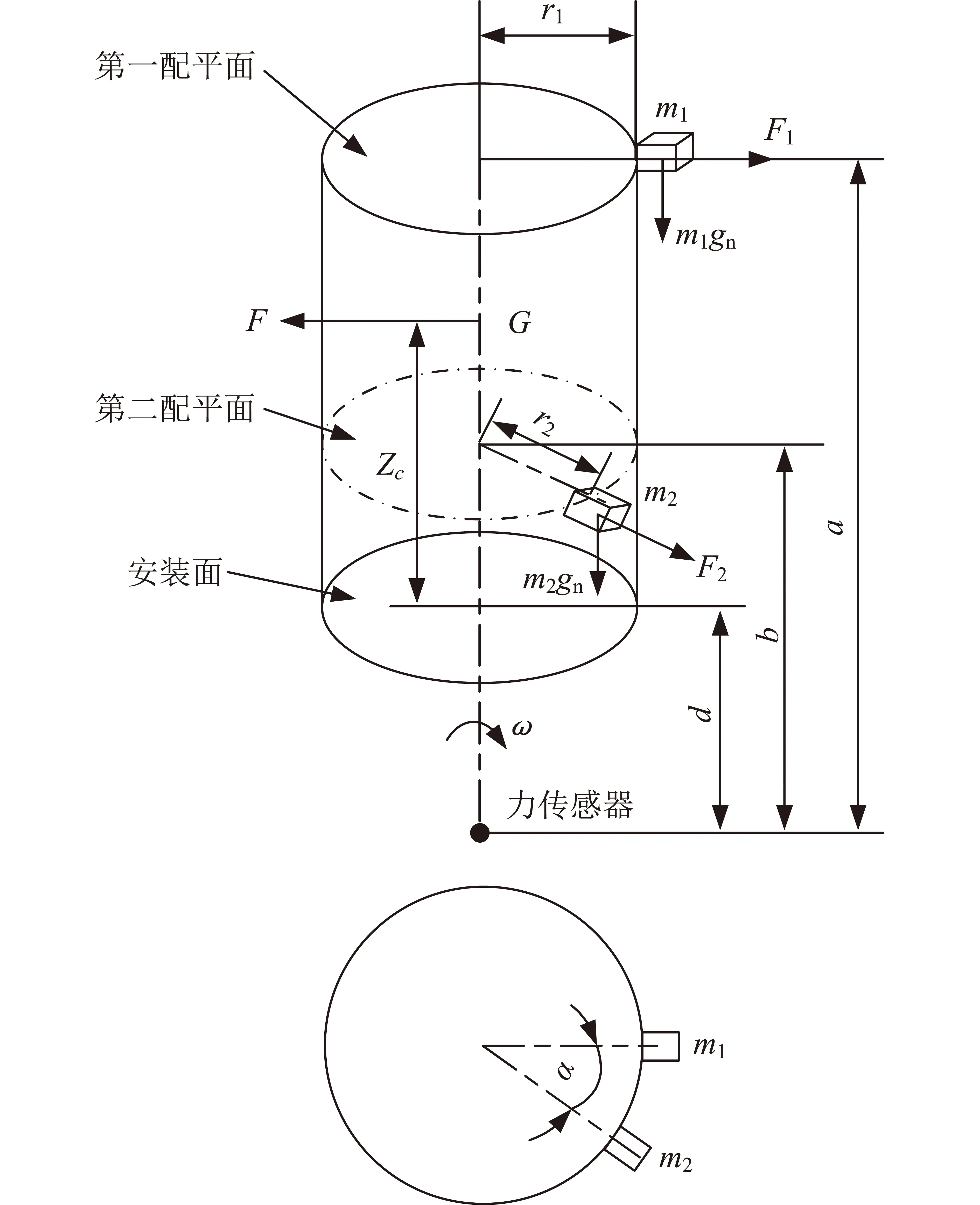
注:图中G为转动体质心,m1gn为质量块m1重力,m2gn为质量块m2重力。图2 动平衡原理示意图Fig.2 Schematic diagram of dynamic equilibrium
(1)
式中:gn为重力加速度;F为旋转中心所受干扰力;M为旋转中心所受干扰力矩;r1、r2分别为质量块m1和m2的矢径。
转化为标量表达式如式(2),其中XY平面平行于配平面,Z轴与转轴重合。已知F及其空间相位角αF,M及其空间相位角αM,求解上、下不平衡量大小和相位m、α,其中α1、α2分别为质量块m1、m2的空间相位角,根据上下不平衡量计算结果,在其反向增加相同质量配重,用以消除上下不平衡量。
(2)
为满足卫星对旋转式星载辐射计提出的动平衡指标要求,产品设计时进行了动平衡设计,在旋转式星载辐射计上设计了两处平面作为动平衡配平面,旋转式星载辐射计动平衡试验配平示意如图3所示,筒体上平面为第一配平面,筒体底平面为第二配平面。旋转式星载辐射计在轨工作时转动周期为1.7s,因此地面动平衡试验时转动周期设置为1.7s;在动平衡机上测得旋转式星载辐射计扫描转动时上下两平面的动不平衡量,然后根据上述配平方法分别在旋转式星载辐射计的第一配平面、第二配平面相应的角度增加对应质量的配重块,以减小整机动不平衡量,试验参数见表1,具体试验流程如图4。
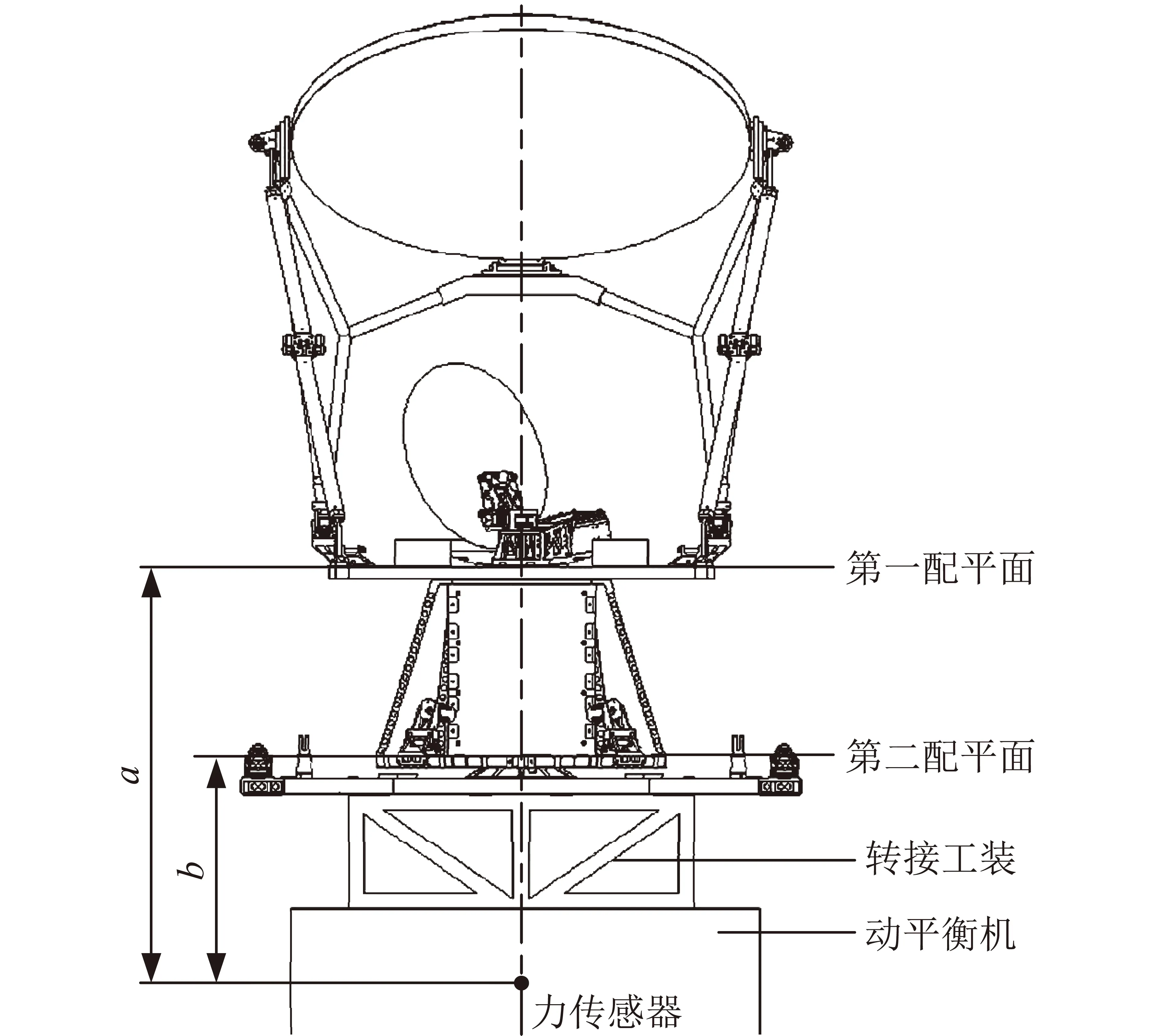
图3 旋转式星载辐射计动平衡配平示意图Fig.3 Schematic diagram of the rotary space-borne radiometer dynamicequilibrium
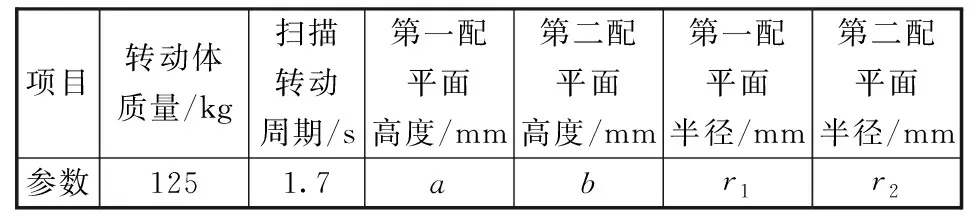
表1 动平衡试验参数Table 1 Parameters of dynamic balance test

图4 动平衡试验流程图Fig.4 Flow chart of dynamic balance test
2.2 旋转式星载辐射计动平衡特性
卫星在轨姿态稳定度指标要求为0.006(°)/s,为了满足卫星稳定度指标要求,卫星总体对该旋转式星载辐射计的干扰力矩指标要求为小于0.2N·m[7]。旋转式星载辐射计对卫星的干扰主要来源于其扫描转动过程中的动不平衡,转子动不平衡为静不平衡和偶不平衡统称[8-9],因此卫星总体对旋转式星载辐射计整机动不平衡量指标要求如下。
(1)静不平衡量不大于6kg·mm。
(2)偶不平衡量不大于9000kg·mm2。
为消除地面风阻的干扰,旋转式星载辐射计采取在真空罐内进行动平衡测试,以提高动平衡测试精度。动平衡测试中,先进行产品的动平衡配平[10],将整机剩余动不平衡量配平至满足指标要求值范围内。根据旋转式星载辐射计结构形式,配平后分别进行产品转动体重复升降、天线展开机构重复收拢展开动平衡影响测试,以测得机构活动部件运动可能引起的产品动平衡状态变化,考核产品动平衡状态的稳定性,测试旋转式星载辐射计最大动不平衡量是否满足卫星指标要求。旋转式星载辐射计动平衡性能测试结果见表2。
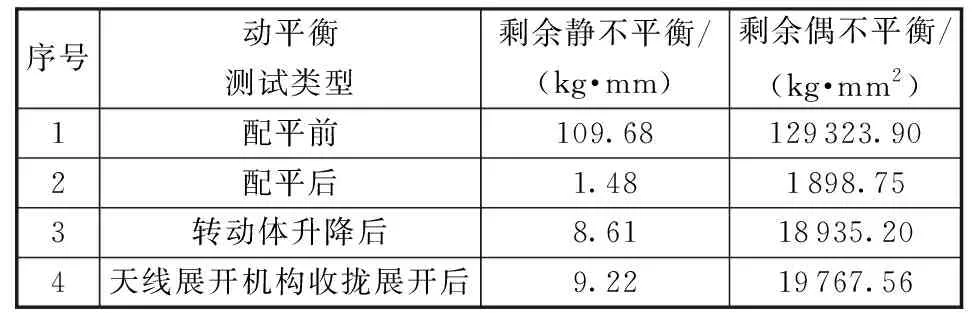
表2 旋转式星载辐射计动平衡性能测试结果记录表Table 2 Rotary space-borne radiometer dynamic equilibrium test results
由表2测试结果可知:旋转式星载辐射计装配完成后,初始静、偶不平衡量分别为109.68kg·mm、129323.90kg·mm2,远大于卫星指标要求。经过动平衡配平后,旋转式星载辐射计剩余静、偶不平衡量分别降低为1.48kg·mm、1898.75kg·mm2,满足指标要求。
但是转动体升降后,天线展开机构收拢展开后,旋转式星载辐射计剩余静、偶不平衡量均出现大幅增长,表明转动体重复升降、天线展开机构收拢展开对旋转式星载辐射计动平衡影响较大,旋转式星载辐射计动平衡状态不稳定,无法满足卫星使用要求。
2.3 转动体升降动平衡影响分析
旋转式星载辐射计装星前,需将转动体抬升8mm后对转动体进行锁紧固定,以减小卫星发射阶段旋转式星载辐射计转动体对扫描驱动机构转子的动力学响应。卫星入轨后,旋转式星载辐射计转动体解锁并下降8mm。
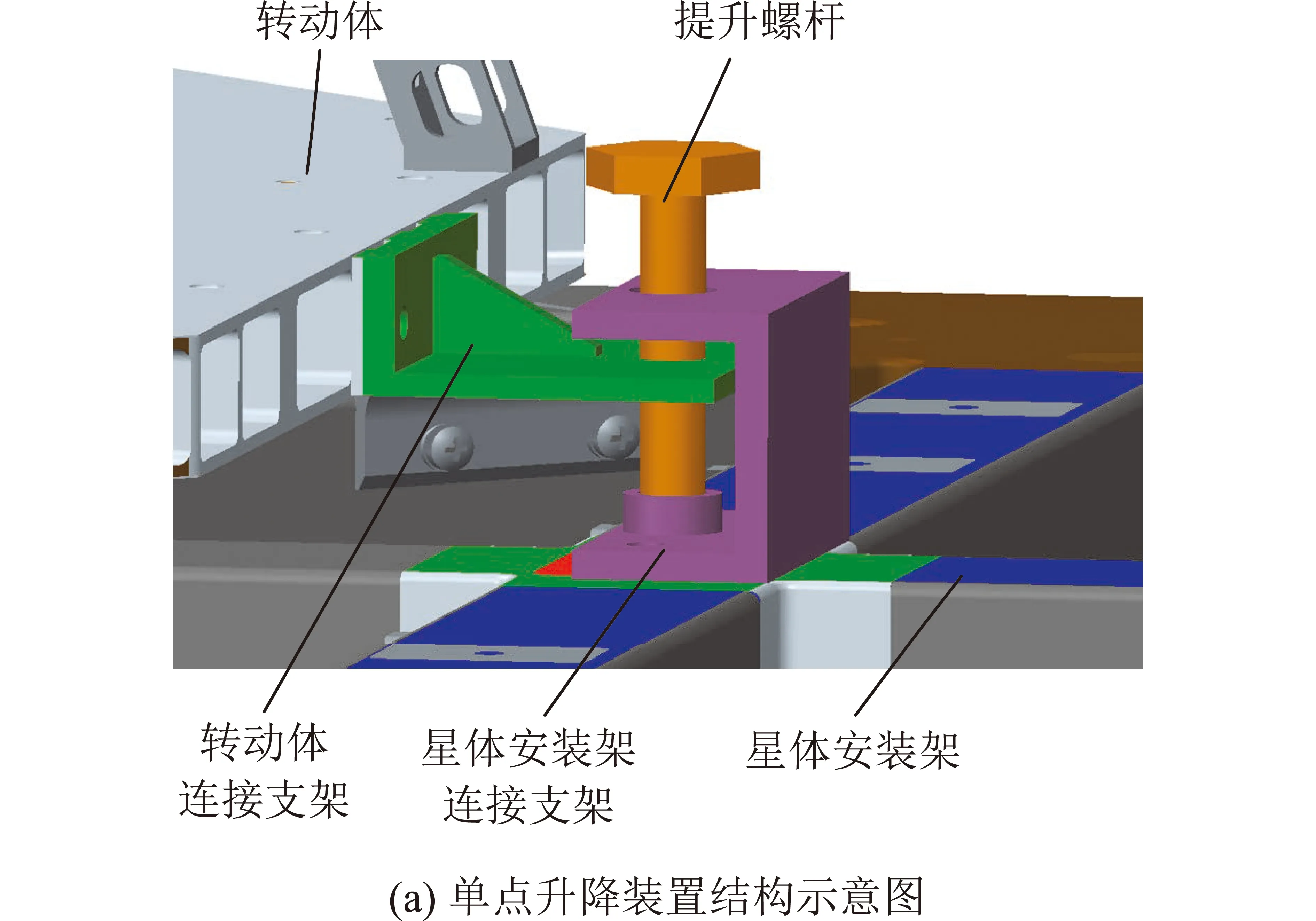
图5 单点升降装置示意图Fig.5 Single point lifting and lowering device
转动体通过单点升降装置升降8mm时,升降过程中由于无法实现同步升降,每处提升螺杆提升或下降的高度无法一致,使转动体升降过程中发生部分倾斜,造成转动体升降前后重复定位精度较差,从而造成整机动平衡变化较大。
为验证转动体升降前后的位置一致性,对升降前后的转动体上基准面进行水平测试,测试结果见表3。

表3 转动体通过单点升降装置升降前后水平度测试Table 3 Rotating body test results afterlifting and lowering by the single point device
由表3可知:转动体重复升降前后,其水平度发生较大变化,转动体升降前后重复定位精度较差,从而引起旋转式星载辐射计动平衡状态发生较大变化。
2.4 天线展开机构收拢展开动平衡影响分析
为满足运载火箭整流罩的包络要求,卫星发射时旋转式星载辐射计天线收拢锁紧,卫星入轨后,天线解锁展开。为了保证天线及天线展开机构解锁展开的可靠性,天线展开机构各铰链设计留有安全间隙,天线展开机构重复收拢展开后无法完全展开到同一固定位置。天线展开机构展开到位后状态如图6所示。
天线展开机构底部铰链主要由公铰链、母铰链、转动轴和关节轴承等部分组成,如图7所示。其中,公铰链与从动杆组件连接,母铰链与机构基准板连接;关节轴承除了能绕轴线转动外,还具备其它方向的偏转自由度,同时关节轴承存在一定的轴向安装间隙,轴向间隙约为0.075~0.425mm,因此公铰链可能在相对母铰链偏转的同时发生轴向移动,引起天线展开机构重复收拢展开到位后重复精度差。
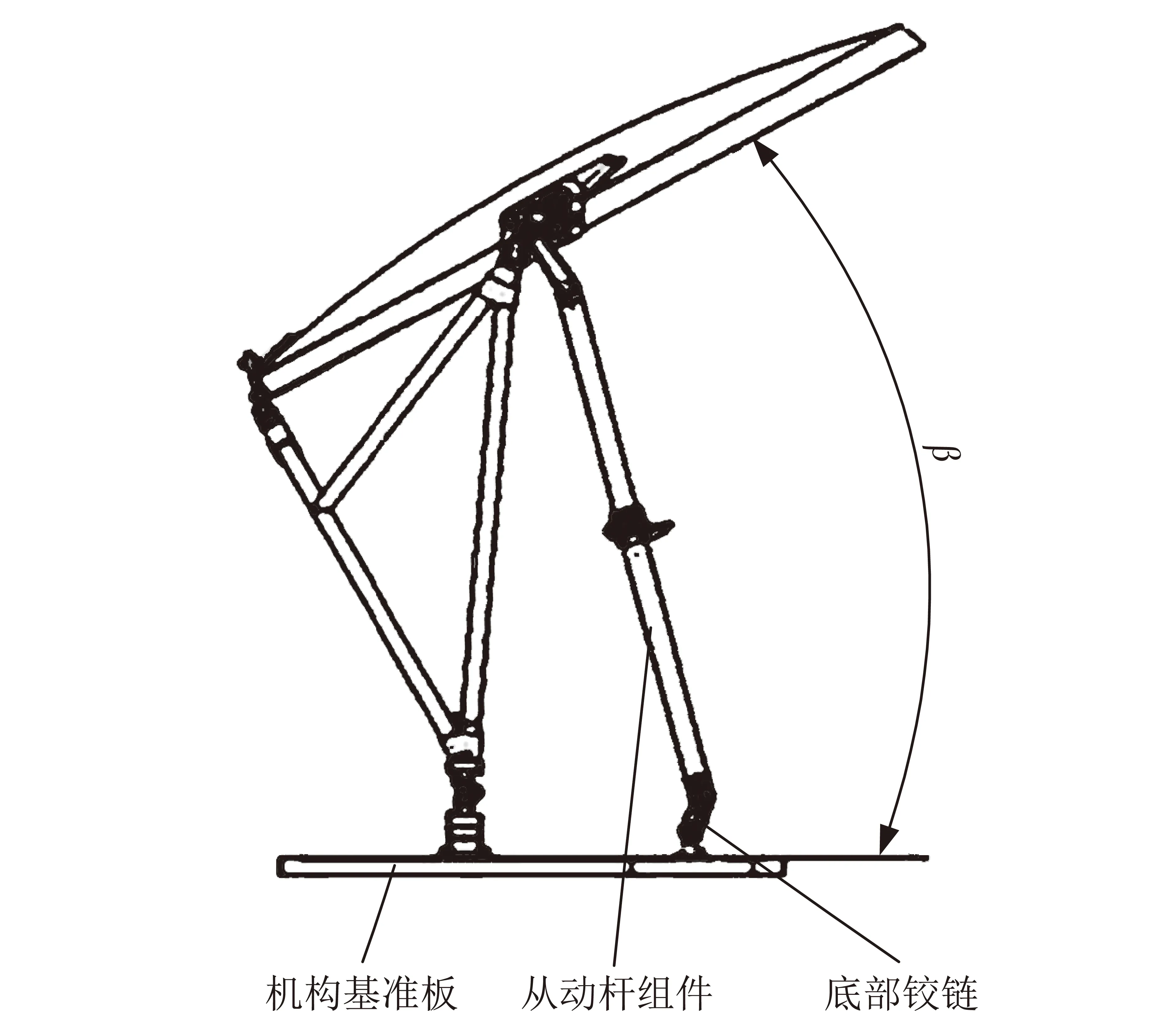
注:图中β为天线展开机构展开到位后角度。图6 天线展开机构展开到位后示意图Fig.6 Antenna after development
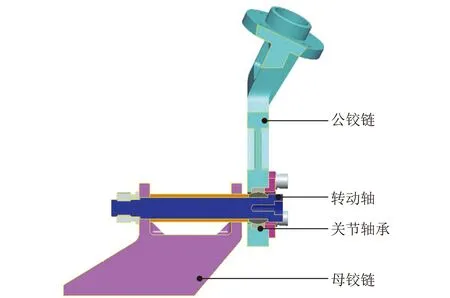
图7 底部铰链结构示意图Fig.7 Structure of the bottom hinge
通过对天线展开机构重复收拢展开,并对天线展开机构每次收拢展开到位后角度β进行精度测量,测试结果见表4。

表4 天线展开机构重复收拢展开到位β角测试结果Table 4 Test results of β angle after repeated deployemnt of antenna mechanism
由表4可知:天线展开机构重复收拢展开后,展开到位β角实测最大变化为0.035°,天线收拢展开后重复定位精度波动较大。天线反射器质量为12.4kg,且距离转动体质心距离较远,通过在三维软件中模拟该重复定位精度变化,分析得到该偏差带来旋转式星载辐射计动平衡变化量约为静不平衡2.3kg·mm,偶不平衡量4000kg·mm2。因此,天线展开到位后重复精度波动较大造成了旋转式星载辐射计动平衡状态的变化。
3 天线展开机构设计改进
3.1 产品设计改进
为了减小底部铰链设计间隙、消除关节轴承偏转自由度对展开精度和重复精度的影响,将天线展开机构底部铰链中的活动部件由原来的1个关节轴承改为2个深沟球轴承,并在不影响高低温展开可靠性的前提下减小设计间隙,轴向间隙减小为0.07~0.1mm,用以保证天线展开机构的展开精度和重复精度。改进后,底部铰链主要由公铰链、母铰链、转动轴、深沟球轴承和调整垫片等组成,如图8所示。
因为asinα+bsinβ>csinγ、asinα+csinγ>bsinβ、bsinβ+csinγ>asinα,所以P3P1=2asinα,P1P2=2bsinβ,P2P3=2csinγ三条线段首尾顺次相连组成△P1P2P3.
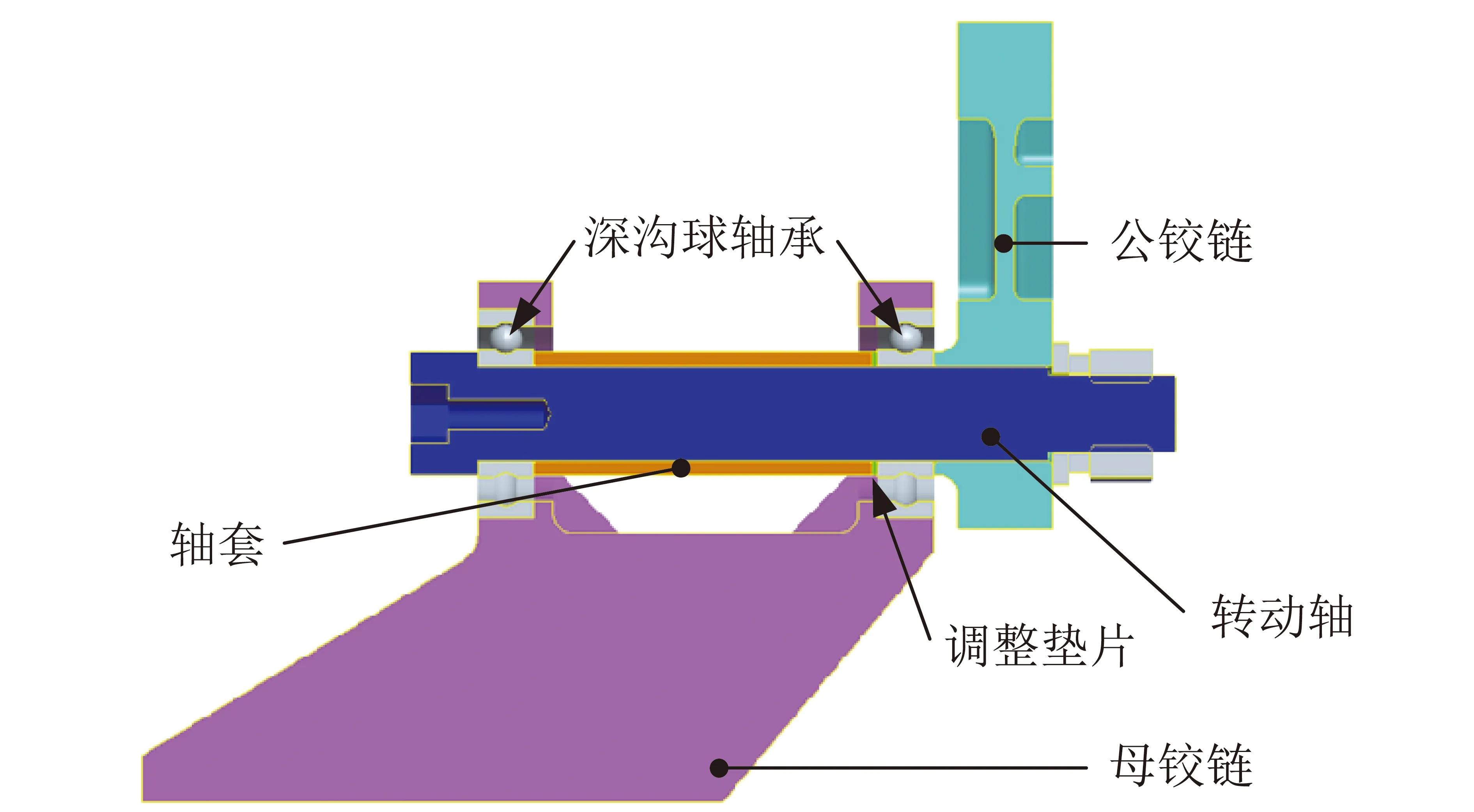
图8 改进后底部铰链组成示意图Fig.8 Bottom hinge after improved
为验证更改深沟球轴承、减小底部铰链活动间隙对于提高天线展开机构展开精度和重复精度的有效性,对天线展开机构进行了5次重复收拢展开,并对每次收拢展开后天线展开机构展开到位β角进行精测。底部铰链更改后,天线展开机构展开到位角度的实测值见表5。
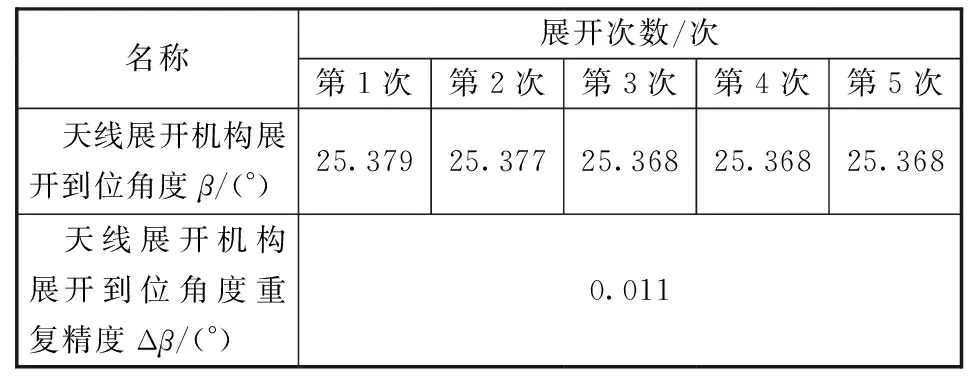
表5 底部铰链更改后天线展开机构重复收拢展开到位β角测试结果Table 5 Test results of β angle after repeated deployment of antenna after improved
由表5测试结果可知:底部铰链关节轴承更换为深沟球轴承后,天线展开机构展开到位角度重复精度Δβ由0.035°提高为0.011°,提高了天线展开机构展开到位后β角的稳定性。
3.2 测试方法改进
3.2.1 转动体升降方式改进
为解决升降不同步使转动体倾斜对旋转式星载辐射计动平衡的影响,对转动体升降方式进行改进设计。设计了一套同步升降装置,以消除单点提升装置升将引起的转动倾斜。转动体同步升降方式如图9所示。通过摇动手轮,可以实现4处U型支撑架的同步升降,从而实现对转动体的同步升降,减小升降不同步对旋转式星载辐射计动平衡的影响。

图9 同步升降装置示意图Fig.9 Consistent lifting and lowering device
为验证转动体升降前后的位置一致性,对升降前后的转动体上基准面进行水平测试,测试结果见表6。
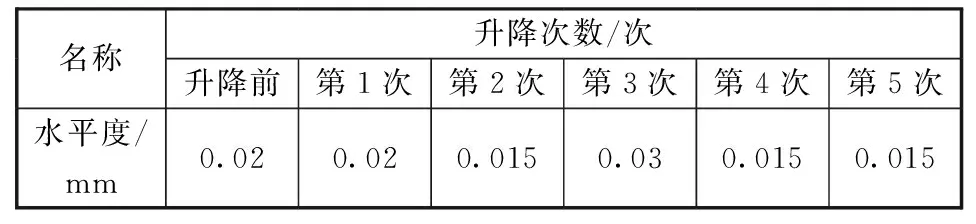
表6 改进升降方式后转动体升降前后水平度测试Table 6 Rotating body test results after lifting and lowering by the consistent device
由表6测试结果可知:改进后,同步升降工装升降过程中,水平度变化最大为0.015mm,升降过程稳定,升降一致性好。
3.2.2 动平衡试验方法改进
天线展开机构展开到位后示意如图6所示,天线展开机构展开到位后的夹角理论值为β,夹角β产生变化时,引起其质心高度的变化,而天线及天线展开机构质量在系统中占比较大且位置较高,其质心高度微小变化都会对旋转式星载辐射计动平衡状态产生较大影响。当天线展开机构收拢展开重复定位精度为±β1,收拢展开前后β角的最大值与最小值差值Δβ最大能达到2β1。此时,天线展开机构收拢展开对旋转式星载辐射计动平衡影响相对较大。
为了减小天线展开机构收拢展开对旋转式星载辐射计配平后动平衡的影响,可在配平前对天线展开机构进行多次收拢展开,并对每次天线展开机构展开到位后的夹角进行精测,若测得的展开到位角度不满足要求,再次进行天线展开机构收拢展开,并精测展开到位角度,直到天线展开机构展开到位后的实测夹角为理论值β,并在此夹角下对旋转式星载辐射计进行动平衡配平。配平完成后,天线展开机构重复收拢展开到位的夹角与动平衡配平时的夹角的差值变量Δβ可以减小至β1。因此,可以将天线展开机构收拢展开对旋转式星载辐射计动平衡的影响大幅减小。
4 试验验证
为验证天线展开机构底部铰链设计改进、转动体升降方式改进、动平衡试验方法改进等措施对旋转式星载辐射计动平衡性能提升的效果,对改进后的旋转式星载辐射计重新进行真空环境下动平衡试验,动平衡配平完成后测试转动体重复升降、天线重复收拢展开后旋转式星载辐射计动平衡状态的稳定性。动平衡试验方案如图3所示,改进后动平衡试验流程如图10所示。
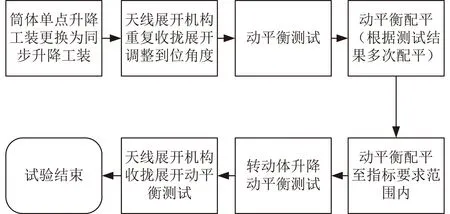
图10 改进后动平衡试验流程图Fig.10 Flow chart of dynamic equilibrium test
改进后旋转式星载辐射计动平衡性能测试结果见表7。
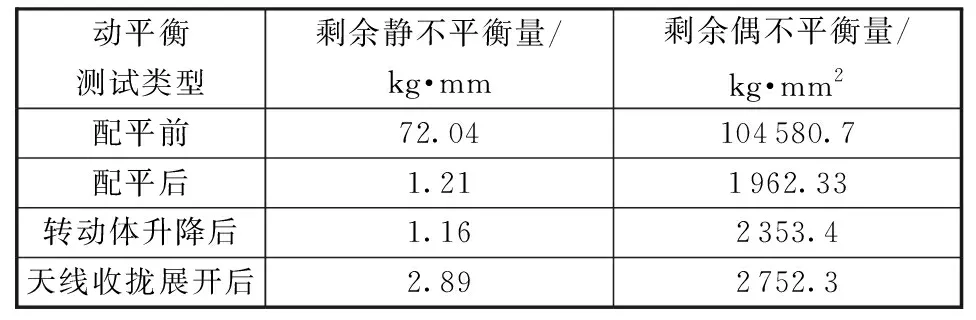
表7 改进后旋转式星载辐射计动平衡性能测试结果记录表Table 7 Rotary space-borne radiometer dynamic equilibrium test results after improved
由表7测试结果可知:改进后,转动体重复升降、天线重复收拢展开等活动部件运动后,旋转式星载辐射计动平衡变化较小,最大静不平衡量为2.89kg·mm,最大偶不平衡量为2752.3kg·mm2,旋转式星载辐射计动平衡状态稳定性大幅提高。
5 结论
本文对旋转式星载辐射计动平衡特性进行了分析,探讨了旋转式星载辐射计动平衡状态不稳定的原因,对旋转式星载辐射计转动体升降、天线收拢展开等动平衡影响因素进行了分析,改进了天线展开机构设计、转动体升降方式和动平衡试验方法;并对改进后旋转式星载辐射计动平衡状态进行试验验证,得到以下结论。
(1)大尺寸、大质量的展开机构等活动部件重复定位精度对旋转式星载辐射计动平衡状态稳定性具有较大影响。
(2)通过减小展开机构活动部件间隙、改进动平衡测试方法、减小天线展开到位夹角与动平衡配平时夹角的差值变量Δβ,可以有效提高旋转式星载辐射计动平衡状态稳定性。
(3)改进后,旋转式星载辐射计动平衡状态稳定,动不平衡量满足卫星使用要求,对整星干扰力矩较小,可以满足卫星的姿态稳定度指标要求。
