基于群体智能的微纳卫星集群自主控制系统研究
2023-05-31付伟达汪忠辉苏晨光何昌远张皓滕扬黄繁荣常蓝天施思寒
付伟达 汪忠辉 苏晨光 何昌远 张皓 滕扬 黄繁荣 常蓝天 施思寒
(1 航天东方红卫星有限公司,北京 100094)(2 北京航空航天大学,北京 100191) (3 中国科学院空间应用工程与技术中心,北京 100094)
在自然界中,很多生物可以组成一些具有自组织特性的集群,如蚁群、蜂群、鱼群和鸟群等[1-2],以实现长途迁徙、逃避捕食者等单个个体难以完成的任务。
近年来,借鉴自然界生物集群自组织特性,航天器集群项目逐渐发展起来,通过星群成员之间协同运动与共同合作控制,完成整体任务目标。
微纳卫星集群是一种以微纳卫星为核心的新型空间体系架构,其中多个可进行信息交互的成员卫星相互协作,具有特定空间构型,共同承担信号处理、通信、有效载荷等任务。微纳卫星集群控制已逐渐发展成为各航天大国研究热点方向,典型项目有自主纳技术集群计划(ANTS)[3]、拉格朗日点太空天气预报集群(L5SWS)、微纳卫星空间自主集群和定位任务(SAMSON)和爱迪生小卫星验证(EDSN)等。面对日益复杂空间环境和任务实时性需求,依靠传统地面逐一控制单星模式难以完成对星群的有效管理,不能有效发挥星群的效能[4],本文提出了星群集群自主控制组织框架和协商机制,研究了基于群体智能的微纳卫星集群自主控制系统,解决星群在复杂空间环境下自主性和整体任务效能问题。
1 微纳卫星集群组织架构和协商机制
目前关于集群控制理论研究主要集中于多智能体系统,通过模拟生物群落的群体行为,借鉴生物个体的信息传递方式,构成群体智能系统[5]。星群集群控制系统首先将星群的每颗卫星看作是一个智能体(Agent),具有一定感知、决策和通信交互能力;然后建立基于多Agent卫星集群控制组织架构和协商机制,构建基于群体智能的微纳卫星集群自主控制系统。
1.1 星群集群群体智能性
国内外研究发现生物群体中每一个成员行为与它们所处的群体关系密切,个体的行为不是某一个作为领导的指挥者决定的,而是基于其相邻个体行为得到的。将这个思路应用到分布式集群控制,本文采用基于群体智能的控制方法来实现星群自主控制,即把整个微纳星群系统抽象成一个多智能体系统(Multi-Agent System, MAS),星群成员卫星都视作具有独立性、自主性的智能体卫星,通过星群间的自主信息交互与协同决策,驱动整个星群系统在宏观上呈现协同一致的行为,使其具备群体智能性,共同完成空间任务。
1.2 星群集群控制组织架构
生物群体中不存在中心节点,个体遵循简单的行为规则,仅具备局部的感知、规划和通信能力,通过与环境和邻近伙伴进行信息交互从而适时地改变自身的行为模式以适应动态环境,具有组织结构分布式特点[6]。本文星群集群控制组织架构采用分布式控制策略,依赖着局部信息交流,产生一种耦合自身状态与相邻成员状态的控制指令,实现对各成员卫星的控制,具有全局的优化性能,同时系统中星群成员增减不会改变运行模式,能够实现对整个星群集群灵活自主控制,如图1所示。

图1 分布式控制星群集群策略Fig.1 Distributed control of satellite swarm
1.3 星群集群控制协商机制
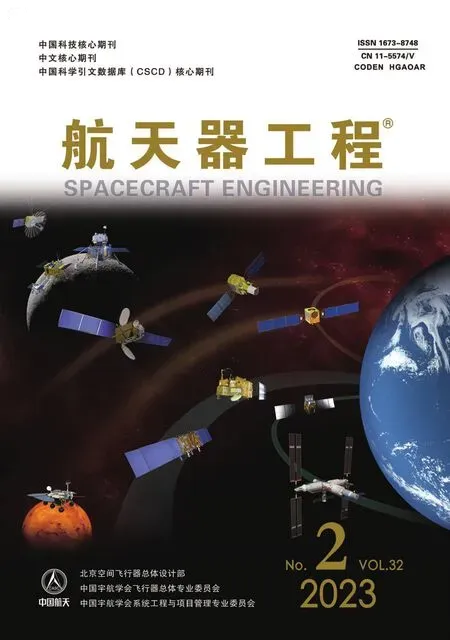
星群集群控制协商机制既要求任务协同求解,又注重实时任务处理,是一个复杂的过程。本文星群集群控制采用多Agent成员卫星协商机制,其具有资源共享、协调性好、分布性高、自主性强的特点,协商机制主要有4种:组织结构协商、基于承诺和约定的协商、结果共享模型和社会规范协商、合同网协议等[7]。其中基于合同网协议的协商机制简单、执行效率高,已经成为飞行器集群任务分配中应用最为广泛的方法[8]。合同网协商机制类似于现实生活中谈判过程,可以通过基于Agent卫星交互的招投标工作来进行相关任务的处理[9]。合同网协议的运行模式能够适用于多智能体系统(MAS),智能卫星的智能性与交互性使得合同网机制在MAS中体现出巨大优势。本文星群合同网协议主要过程如下:当某Agent卫星资源不足以完成任务时,此Agent作为招标者通过任务发布、标书收集、中标通知和合同建立等流程,完成星群集群合同网协商机制,如图2所示。
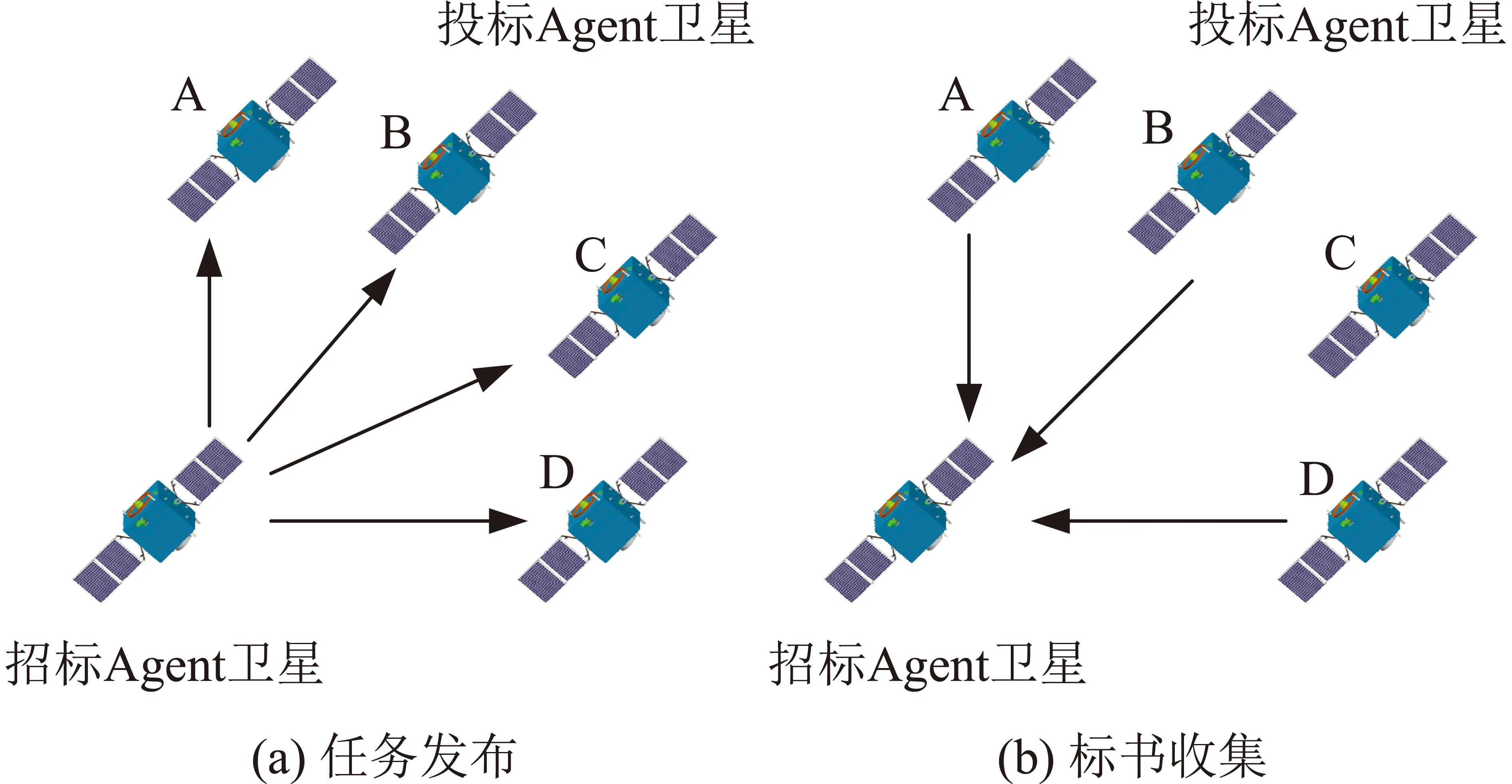
图2 星群集群合同网协议Fig.2 Contract network protocol of satellite swarm
2 微纳卫星集群自主控制系统
如前文所述,星群成员数量多,如地面逐一进行单星控制,与有限的地面测控资源之间存在巨大矛盾,决定了微纳星群必然朝着基于群体智能的自主控制方向发展。集群自主控制是在星群成员卫星具有一定认知、决策和自身健康状态管理基础上,通过星间网络信息交互与协同决策,驱动整个星群系统在宏观上呈现协同一致的行为,即星群集群自主控制的成员特征组成群特征,星群的决策通过成员来实现,如图3所示。
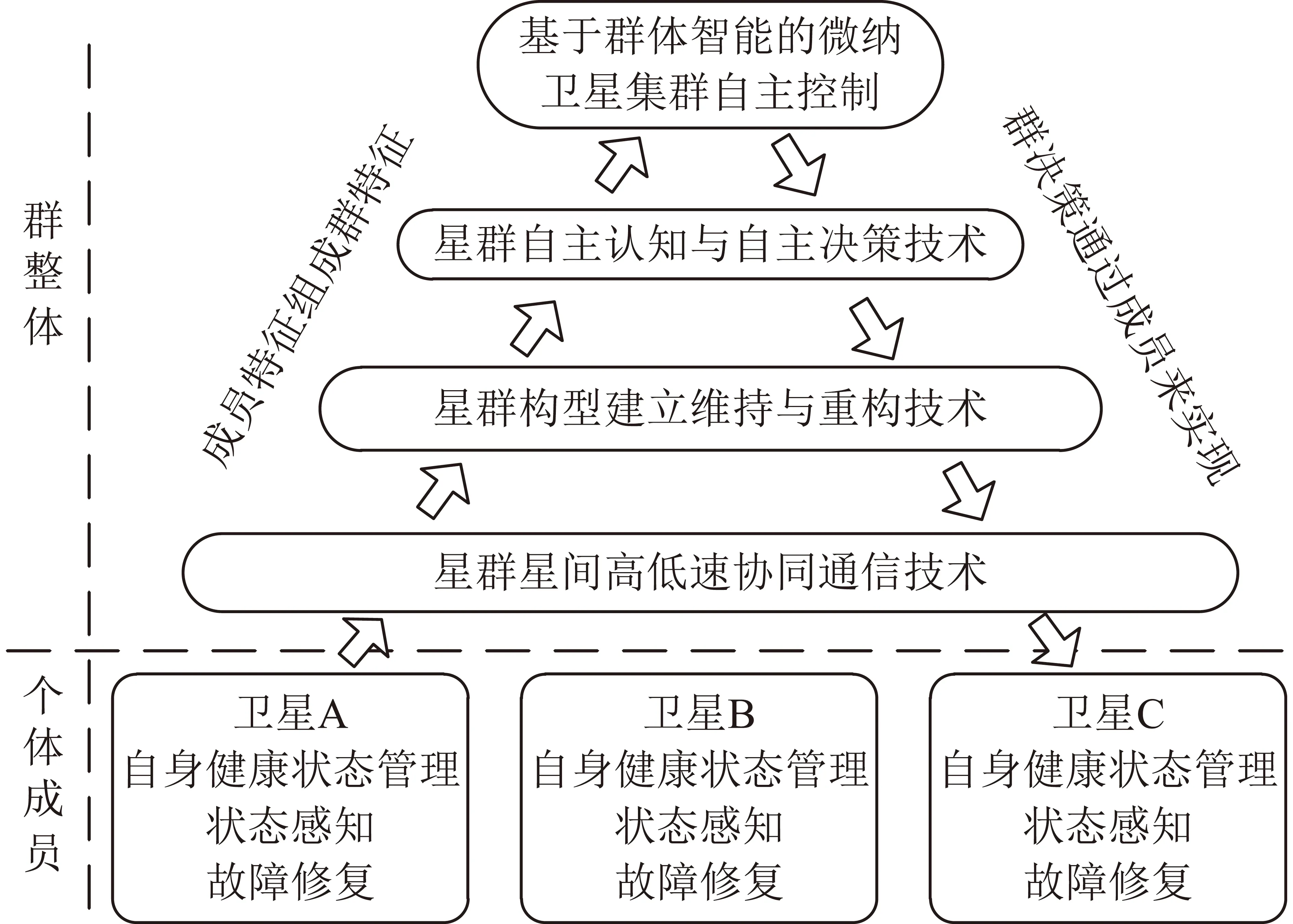
图3 星群集群自主控制系统框图Fig.3 Block diagram of micro-nano satellite swarm autonomous control
针对图3分析,本文总结出集群自主控制主要包括星群自主认知和自主决策技术、构型建立维持与重构技术和星间高低速协同通信技术等主要研究内容(见图4),具体如下。
(1)星群自主认知与自主决策技术:星群自主感知融合生成任务态势;采用基于交互协商的分布式协同任务规划方法,星群具有自主决策能力;不同功能的卫星自主执行协同实施行动,由单星单打独斗到星群联合工作方式的转变,实现星群系统的智能涌现。
(2)星群构型建立维持与重构技术:星群在非任务期间处于类似蜂群、鸟群松散编队状态,在低能耗不碰撞的条件下飞行;在任务期间构型能够快速建立与维持,完成群整体行为和个体成员行为的进行控制。同时,利用星群测量信息冗余关系,进行星群故障诊断,识别故障卫星,完成星群构型重构。
(3)星群星间高低速协同通信技术:星群采用全向无中心自组网通信、定向高速激光通信构建星间高低速协同通信网络系统,通过全向低速自组网提供传输位置信息引导高速激光链路协同传输,完成星群低速协同控制信息和高速载荷数据协同传输。
图4 星群集群自主控制信息流Fig.4 Micro-nano satellite swarm autonomous control information flow
2.1 星群自主认知和自主决策技术
微纳卫星星群成员众多,相互之间距离很近,实时性要求高,需要微纳星群具备自主认知和自主决策能力。微纳星群自主认知和自主决策中面临目标非合作特性、任务规划时效性强、星上计算资源受限、规划要素多样且复杂等难点,对星群自主认知和自主决策框架提出较高的要求,为此,本文构建基于群体智能的分布式协同框架,提出基于合同网的任务协商与分配方式,以适应分布式动态场景下星群任务对快速响应能力和资源优化性能要求。
微纳星群自主认知和自主决策问题可分解为星群任务可调度性预测、任务协商与分配和星群成员方案优化等内容,研究框架如图5所示。本文星群任务可调度性预测主要利用星群任务规划经验数据,将历史规划结果看作训练数据,通过构建机器学习模型,准确预测当前规划方案,完成对星群任务规划;任务协商与分配则采用基于市场机制设计的合同网协议,将蚁群算法、粒子群算法、遗传算法等[10]智能优化技术引入合同网招标、投标和评标过程,利用历史任务分配结果加速星群协商效率;成员卫星方案优化则是在单星层面根据资源和任务等约束下对分配的任务进行优化调整,包括卫星动作优化、轨迹优化、载荷执行等方面。
图5 星群自主认知和自主决策研究框架Fig.5 Research framework for satellite swarm autonomous cognition and autonomous decision
2.2 星群构型建立维持与重构技术
微纳星群构型通过控制微纳星群的各成员卫星,完成构型建立、维持以及重构,同时在星群操作的过程中防止出现碰撞,需要研究星群在一个均衡的前提下,实现构型最优的性能指标。因此,本文提出采用合作博弈优化的理论使星群内各成员卫星的资源消耗达到均衡,不出现某颗成员卫星过度消耗资源(燃料、能源等)情况,使整个星群实现构型最优的性能指标。博弈论又称对策论,是一种使用严谨数学模型来解决现实世界中的利害冲突的理论,是建立在对方也采取各自“最好策略”的前提下,各方最终达到一个力量均衡。星群内的所有成员卫星都是博弈的成员,星群内某个成员卫星可能的行动方案为策略,局中人的策略全体形成策略集,通过采用博弈论达到星群最优构型。
本文根据星群相对运动方程确定星群集群构型,对星群集群重构、保持控制问题进行问题建模,设计控制算法:根据星群常用集群构型设计构型重构算法,针对星群设计轨道保持算法,利用相对轨道要素取交集方式设计轨道控制,利用博弈论建立求解方程,通过数学工具计算星群各成员卫星的均衡解,完成星群构型建立维持与重构控制[11],如图6所示。
图6 星群构型建立维持与重构技术Fig.6 Satellite swarm establishment maintenance and reconstruction
2.3 星群星间高低速协同通信技术
微纳星群集群需要传输成员卫星低速的遥测、遥控、协同信息(任务序列、导航点序列)和高速的载荷数据,对星间传输链路提出了低速全覆盖和高速精准传输的需求。因此,本文星间高低速协同通信网络采用了星间自组网和高速激光链路相结合的方式,实现信息共享协同工作。星群集群任务过程中,首先通过自组网实现星间协同信息引导激光器的跟瞄和对准,达到高低速协同通信的目的,星间高低速网协同通信工作流程如图7所示。
其中,本文的全向星间自组网包括物理层、数据链路层、网络层和应用层[12],具备服务质量(QoS)功能,保证了信息的高可靠的传输,主要完成低速遥测、遥控、协同信息的全向传输,如图8所示;星群配置的小型化、高带宽的星间激光链路则完成点对点定向的大数据量载荷数据传输。
图7 星群高低速网协同通信工作流程Fig.7 Satellite swarm high and low rate cooperative communication process
图8 星群自组网协议Fig.8 AD Hoc network protocol of satellite swarm
3 微纳卫星集群控制场景仿真
本文设计了综合遥感微纳星群典型应用场景,星群的10颗成员卫星主要配备可见光、高光谱、合成孔径雷达(SAR)、红外、微光相机等5种载荷,组成特定构型的星群集群,获取融合的目标特征,实现对目标发现、识别、确认后,进行长时连续多维成像,感知目标的特征变化。根据任务需求,星群控制要求轨道误差小于20m、网络通信建立与重构时间小于5s。可以看出:上述星群若采用地面单星控制,星地测控链路单条指令闭环时间约10s,地面管控不能满足星群实时性指标且工作量巨大,因此,只能依靠星群集群自主运行控制技术,完成星群集群控制。为此本文构建了仿真系统,验证微纳卫星集群自主控制可行性,如图9所示。
仿真过程中,10颗微纳星群搭载运载发射入轨,星群入轨后采用自主控制防碰撞,星群轨道由松散状态到建立初步构型三维轨迹如图10所示。
经10天仿真测试可得:星群自主单次维持控制量小于0.5m/s(见图11(a)),长期运行稳定,自主控制满足任务需求;星群成员轨道控制误差小于20m(见图11(b));当星群成员卫星出现故障后,星群自主完成构型重构(见图11(c));星群网络通信建立与重构时间0.8~4.6s,星群网络通信成员卫星的自主动态接入、退出功能正确(见图11(d))。综上所述,星群集群自主控制功能正确,满足任务指标需求,验证了微纳卫星集群自主控制的可行性和正确性。
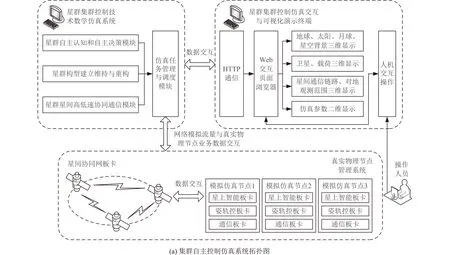
图9 微纳卫星集群自主控制仿真软件Fig.9 Simulation software for micro-nano satellite swarm autonomous control
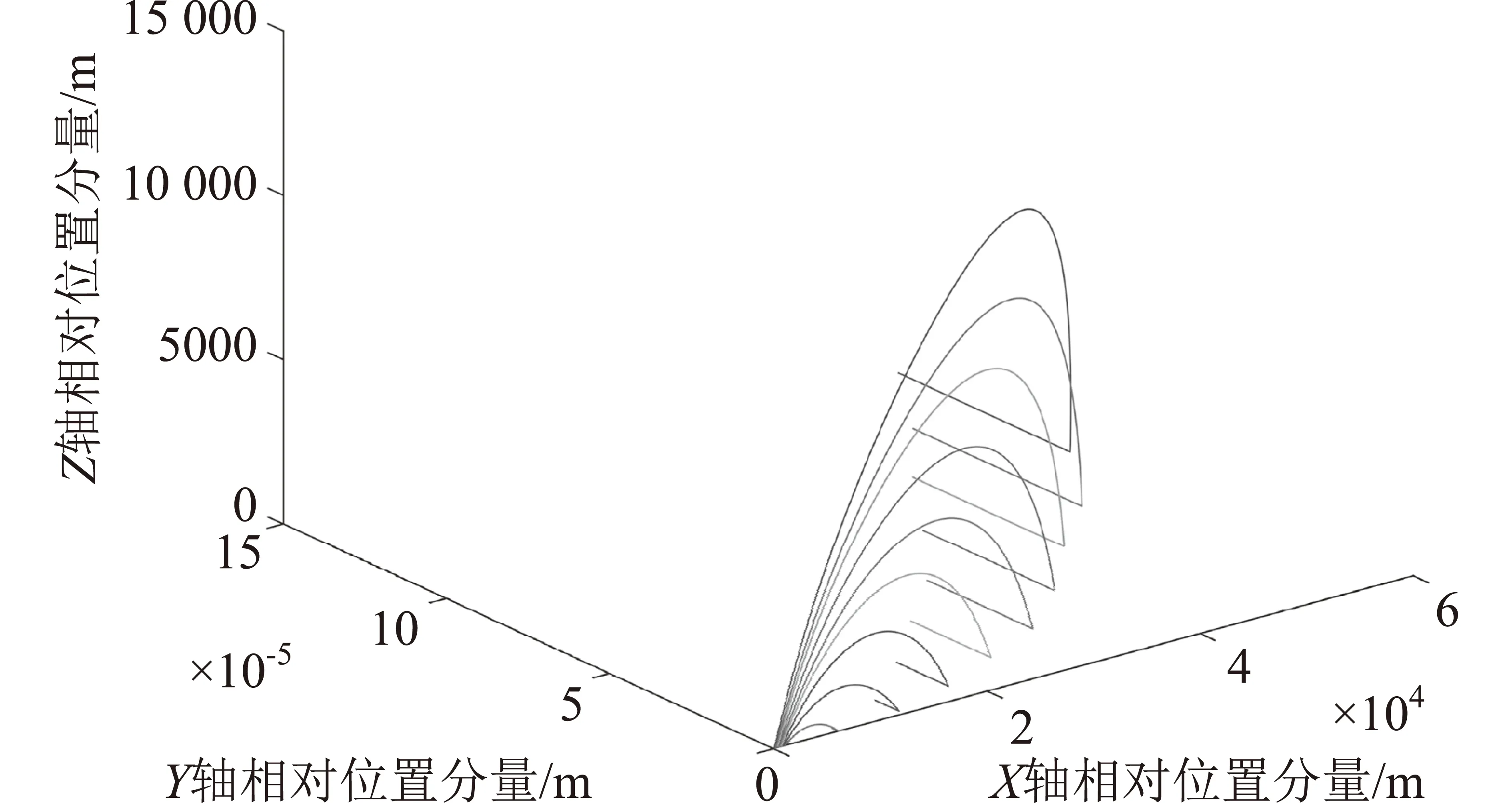
图10 星群构型建立三维轨迹Fig.10 Three-dimensional trajectories of satellite swarm configuration
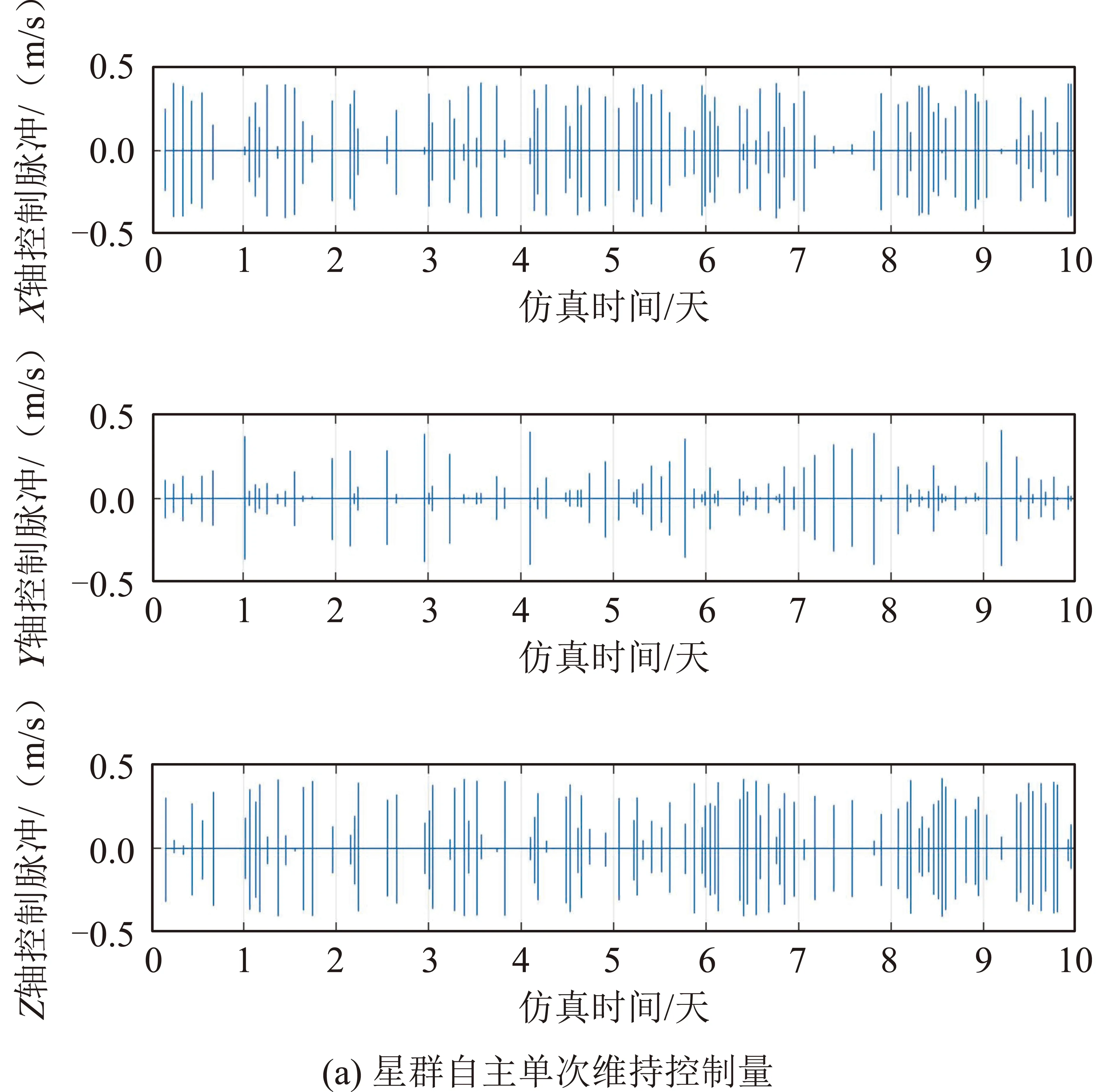
图11 星群集群自主控制仿真Fig.11 Simulation of satellite swarm autonomous control
4 结束语
本文根据星群运行效能和地面无法单颗逐一管理单星的需求,研究了基于群体智能的微纳卫星集群自主控制系统,验证了微纳卫星集群自主控制能力,为推动微纳卫星集群在轨应用提供了技术支撑。未来,以基于群体智能微纳星群自主控制为研究基础,进一步发展微纳集群星上产品、软件、算法和标准规范,开展星地端云协同集群应用系统研究,是拓展微纳星群在轨应用创新的有效途径,能够满足日益增长的航天复杂任务需求,对提升我国航天装备能力具有一定意义。