丘陵山地农业装备与坡地作业关键技术研究综述
2023-05-28孙景彬刘志杰杨福增雒鹏鑫
孙景彬 刘志杰 杨福增 孙 群 刘 琪 雒鹏鑫
(1.聊城大学机械与汽车工程学院, 聊城 252000;2.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100;3.农业农村部北方农业装备科学观测实验站, 陕西杨凌 712100)
0 引言
我国的丘陵山地面积辽阔,约占国土总面积的70%[1],主要分布在19个省区市的1 400余个县市区,其耕地面积、农作物播种面积均占全国的1/3,涉及农业人口近3亿人[2],由此可见该地区农业的发展水平直接关系到我国农业的整体水平。但是,目前丘陵山区的农业机械化水平严重滞后,2020年,丘陵山区县(市、区)农作物耕种收综合机械化率为49%,远远低于全国综合机械化率71%的水平[3]。目前,农业农村部印发的《“十四五”全国农业机械化发展规划》[3]中明确指出“积极发展丘陵山区农业生产高效专用农机,推动丘陵山区通用动力机械装备研发,增加装备供给。”《中共中央国务院关于做好2022年全面推进乡村振兴重点工作的意见》[4]亦明确指出“全面梳理短板弱项,加强农机装备工程化协同攻关,加快丘陵山区机械研发制造并纳入国家重点研发计划予以长期稳定支持。”由此可见,推进丘陵山区适宜农业装备的研发推广迫在眉睫。
从农业耕地开发的角度来说,必须要有一个适宜开发的范围。丘陵山区耕地从坡度等级情况看:0°~15°的耕地比重最大,占87.5%;15°~25°、25°以上的耕地分别占9.2%和3.3%。从适宜农业装备作业的角度看,2°~6°的缓坡地与 2° 以下的平耕地区别不大,在该坡度耕地上作业的农业装备基本不需要进行姿态调平就可以满足需求;6°~15°的丘陵地更适宜于中小型农机具作业,并且作业过程中要实现姿态调平来保证农机具的安全性及作业质量;而 15°~25°的坡耕地,则只宜使用小型农机具,对姿态调平系统的需求更为必要;25°以上的陡坡地,不宜开发为耕地[1]。 故亟需解决的丘陵山区农业装备问题主要是指 6°~15° 丘陵地和 15°~25°坡耕地的机械化问题,即以中小型机械为主的丘陵山区小田块机械化问题;此外指的是丘陵山区特有经济作物如茶叶、水果等的机械化问题[1]。
因此,本文拟综述国内外山地拖拉机整机及其姿态调平技术的现状、山地农机具及其作业性能的研究进展,结合我国丘陵山区的实际特点,分析讨论现有坡地耕作模式及存在问题、坡地作业机理研究的先进方法,展望丘陵山区坡地机械化作业技术与装备、山地拖拉机及其配套机具的研究趋势,以期为我国丘陵山区先进适用农机装备的研发推广提供借鉴。
1 山地拖拉机国内外研究现状
1.1 山地拖拉机国外研究现状
国外企业和科研院所对丘陵山地拖拉机的研发起步较早,研发出各具特点的丘陵山地拖拉机,瑞士Aebi公司生产的TT270型(图1a)和奥地利Reform公司生产的Mounty100型山地型拖拉机(图1b)均具有较好的牵引附着性能和越野性能,但缺乏丘陵山地农业生产所必需的稳定性、地形适应性,而且机型偏大,难以适应我国丘陵山地道路窄、地块小的农业自然条件。
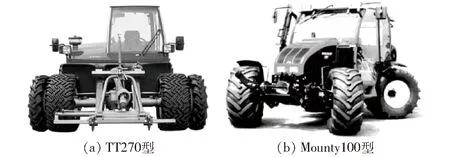
图1 国外大型山地拖拉机
意大利安东尼奥卡罗拉公司生产的MACH4R型拖拉机(图2)采用四轮驱动半履带,有较好的动力性和缓坡地适应性。但该型拖拉机价格相对昂贵,不具有坡地姿态调平机构,较大坡度山地适应性差,难以适应我国丘陵山地相对复杂的作业场景。

图2 MACH4R型山地拖拉机
意大利BM TRACTORS公司生产的BETTER 180型山地拖拉机(图3),具有较好的地面适应性,配备独立轴转向系统,可分别实现前轮、后轮及四轮转向,装载电子BETCAM系统、自动减速装置、自动爬升系统,以防止系统中过大的推进压力。但该机型地面附着性能、坡地自动调平性能欠缺。

图3 BETTER 180型山地拖拉机
意大利BCS公司生产的Sky-Jump-V950型山地拖拉机[5](图4),采用前轮胎后橡胶履带型式,适用于果园、茶厂、苗圃等复杂地形的作业。并采用DUALSTEER型双转向系统,将拖拉机底盘中央铰接系统和前轮机构连接在一起,该技术结构可以使拖拉机的转弯角度(理论值)达到70°,极大地减小了拖拉机的转弯半径。同时,该拖拉机具有短轴距和低重心的特点,使得其在陡峭的斜坡上表现出来的牵引力、稳定性、机动性和安全性均较为优越。
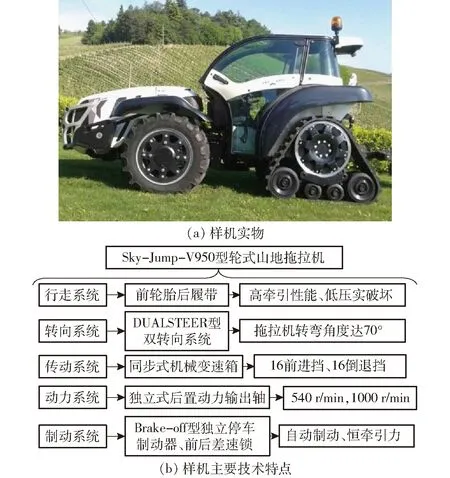
图4 Sky-Jump-V950型山地拖拉机
伊朗科技大学及Jahade Keshavarzi科研机构分别对山地拖拉机稳定性及行走机构进行了研究,如图5所示,该拖拉机在24°左右的坡地上具有较好稳定性和地形适应性。
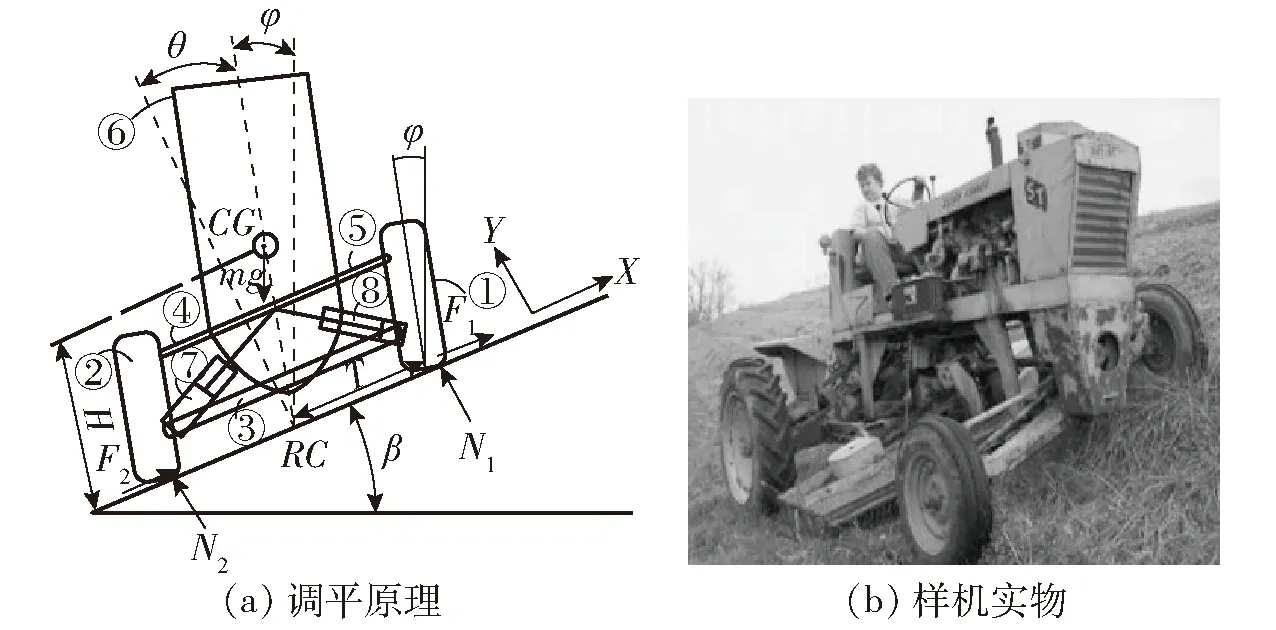
图5 伊朗科技大学研发的山地拖拉机
综上,国外的山地拖拉机的研发较为先进,但大多体积偏大、价格昂贵,不适合我国丘陵山区道路窄、地块小的农业自然条件和山区农民购买力偏低的经济条件。
1.2 山地拖拉机国内研究现状
目前国内丘陵山区作业的主要机型为手扶山地拖拉机和微耕机,例如:中国农业大学研制、中国中车集团生产的STI-8型山地拖拉机(图6a),该拖拉机为小型手扶式拖拉机,可以在小于25°的坡地上保持车身水平,但手扶式拖拉机操作较为困难,对驾驶人员的操作水平要求较高,人员的安全性难以保证;重庆合盛、北京蓝天等公司研制的山地微耕机(图6b),其主要特点是体积小、价格低,被我国许多丘陵山区农民使用,但存在动力小、操作强度大、功能单一等缺点。

图6 丘陵山区主要作业机型
“十二五”以来,在国家政策和科研项目的支持下,国内的企业、高校等机构在山地(包括轮式、履带式)拖拉机的研发方面开展了系列工作并取得一些成果。轮式山地拖拉机研究方面,上海交通大学和山东五征集团联合研制了一种具有姿态主动调整功能的山地轮式拖拉机,如图7所示,具有较好的坡地适应性[6-7]。四川川龙拖拉机制造有限公司研发了可进行姿态调整的轮式山地拖拉机,如图8所示,实地试验表明样机具有较好的稳定性和地形适应性[8]。并且基于电控液压悬挂、智能控制自主作业技术等拖拉机前沿技术,该公司自主开发的重载防脱挡技术和速度匹配液压驱动技术已应用于其丘陵山地拖拉机。
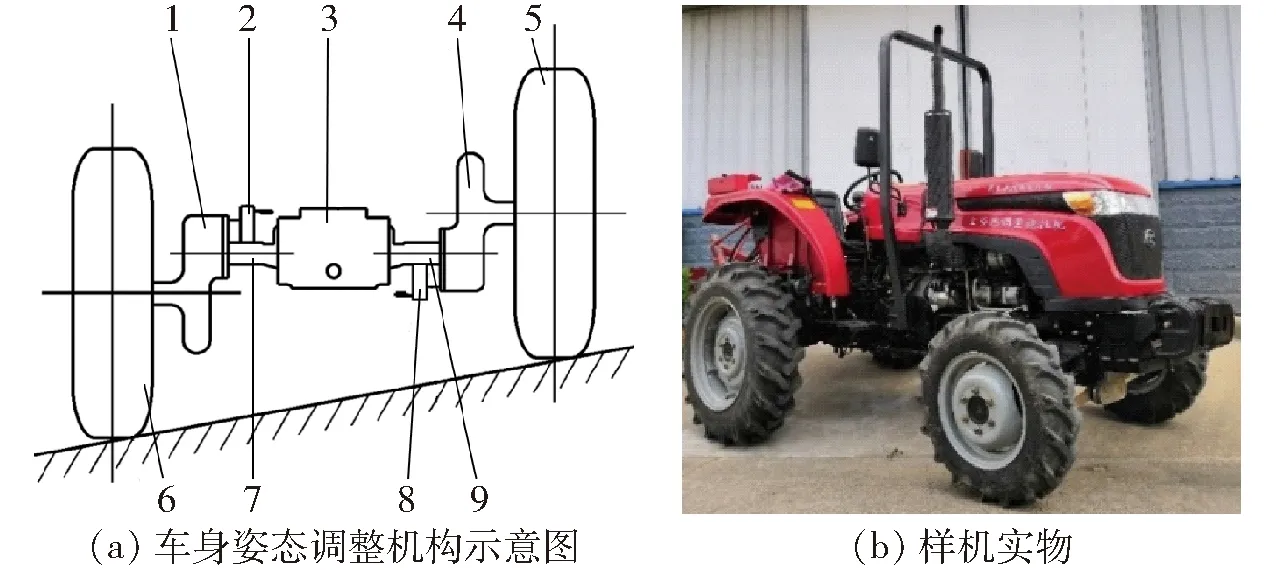
图7 山东五征集团的轮式山地拖拉机

图8 四川川龙拖拉机制造有限公司的轮式山地拖拉机
此外,山东五征集团联合山东农业大学[9]针对目前姿态调整式丘陵山地拖拉机只能实现静态调平和差高调平、调平精度低等问题,设计了一种轮式丘陵山地拖拉机扭腰姿态调整装置,结构如图9所示。该装置通过调整前后车身的相对转动来实现山地拖拉机对复杂路面的适应,扭腰轮式山地拖拉机的样机如图10所示。

图9 扭腰姿态调整装置结构图

图10 扭腰轮式山地拖拉机
履带式山地拖拉机研发方面,西北农林科技大学杨福增团队[10-12]研发了一种小型山地履带无人拖拉机(图11a)。该机采用遥控式液压差高装置(图11b)来保证拖拉机在0°~23°的等高线坡地上完成横向姿态调整,使车身在坡地始终处于水平状态,提高了其抗侧滑、抗倾翻等坡地稳定性能;同时该机借鉴无人机的设计经验,并依据黄土高原山地实车试验,首次设计了无驾驶座的拖拉机遥控操作系统,其优点是实现了拖拉机的人机分离,彻底消除了操作驾驶人员的坡地安全隐患;需要特别说明的是,操作驾驶人员的坡地安全性是山地拖拉机的安全底线,也是与普通拖拉机的显著区别。

图11 小型山地履带无人拖拉机
此外,西北农林科技大学杨福增团队研发了一种全向姿态调整山地履带无人拖拉机[13-14],如图12所示。该机基于“平行四杆机构”和“双车架机构”实现机身的横、纵向姿态调整(自动式/遥控式),调平原理如图13、14所示。显著提高了山地拖拉机坡地作业的稳定性和安全性,并具备配套农具的坡地自适应仿形作业功能,试验结果表明该机在坡地可较好地实现坡地仿形旋耕、播种和喷药等作业。此外,整机集成遥控技术,实现人机分离,大大提高了操作人员的安全性和便捷性;基于静液压驱动技术实现整机0~8 km/h的无级调速,从而满足丘陵山区多工况下的行驶和作业速度需求。

图13 山地拖拉机横向调平原理图

图14 山地拖拉机纵向调平原理图
综上所述,目前国内的丘陵山地拖拉机研发大部分处于科研样机阶段,山地农机产品化尚存在不足,有必要进一步优化、改进研发适合我国山区农业自然条件、先进适用、价格合理的丘陵山地拖拉机,由具有一定产业化实力的企业实现其批量生产、推广应用,同时最好借助快速换装模块,高效便捷地适配耕、种、管、收、运等多种作业机具,以解决农业机械化发展的动力瓶颈和卡脖子短板问题。
1.3 山地农机坡地作业机身调平技术研究现状
高效高质量丘陵山地拖拉机的研发已经成为当前农业装备研究领域的热点之一。目前,国内外针对丘陵山地拖拉机的机身姿态调平、农具坡地仿形作业等关键技术已开展了大量研究,并取得了较多的成果。
国外对于山地农机调平系统的研究起步较早,日本久保田、大同等公司生产的履带联合收获机,通过履带升降机构调节单侧履带的高度来补偿机身的横向倾斜[15-19]。HAUN[20]发明了适用于割草机的调平机构,可使割草机身始终保持水平状态。美国约翰迪尔公司研发了适用于坡地作业的联合收获机调平系统,具有较好的稳定性[21],但上述两种调平系统均不适用于山地拖拉机的牵引作业,而拖拉机最基本而又繁重的作业方式是通过牵引实现耕地等基本农艺功能,这意味着拖拉机必须具备承受各种载荷(包括各种土壤环境和农艺要求相对应的载荷)的牵引特性。AHMADI[22]设计了一种拖拉机动态调平模型,研究了在位置扰动下,速度、坡度及地轮摩擦系数对横向稳定性的影响。LEONARD等[23]研究了一种车辆自动调平系统,通过采集车身倾角信息来完成车身的姿态调整,但该系统仅能实现车辆的静态调平。
机身调平研究方面:彭贺等[24-25]研制了基于液压缸驱动的轮式拖拉机车身四点调平机构,完成了运动学和动力学的仿真分析,并设计了一套车身自调平控制系统,开展了相关试验验证,如图15所示。刘平义等[26-27]设计了一种适用于丘陵山地的自适应调平底盘,通过动态调平减小底盘的侧倾角和俯仰角,但其动力偏小。文献[28-29]基于液压差高机构的微型山地履带拖拉机,运用PID算法实时控制车身的调平角。齐文超等[6-7]设计的基于双闭环PID的山地拖拉机姿态主动调整控制系统,如图16所示,其精度和稳定性基本能够满足实际使用需求。刘国辉等[30]为提高山地拖拉机在复杂农田环境中的作业平稳性,基于 Matlab/Simulink仿真平台,搭建了半主动悬架拖拉机七自由度时域仿真模型,包括四轮路面激励模型、半主动悬架振动模型、半主动悬架拖拉机车体受力分析模型、车身姿态分析模型以及半主动悬架拖拉机时域仿真模型,以车身垂向位移、车身倾斜角和车身俯仰角作为拖拉机的姿态变化参数进行仿真试验,结果表明相比增量式PID控制,基于BP神经网络PID控制的半主动悬架拖拉机,车身平稳性得到较好提高。
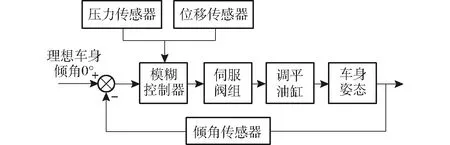
图15 拖拉机调平控制系统原理图

图16 山地拖拉机姿态主动调整控制系统原理图
悬挂系统与农具姿态调整方面:蒋俊等[31]为满足配套农机具对坡地地形的适应性,保证农机具作业质量,针对2个不同负载的悬挂油缸需要同步运动的工况需求,设计了适用于丘陵山地拖拉机的电控液压悬挂系统,通过 AMESim 软件搭建系统仿真模型,分别对定、变负载 2 种工况进行了仿真分析,结果表明速度、位移误差控制在5%以内,基本满足设计要求。范永奎等[32]设计了一款电液悬挂仿形机构,采用带死区的经典PID算法控制农具的横向倾角,使其与地面保持平行。翟志强等[33]针对山地拖拉机电液悬挂控制系统田间试验困难、可重复性差的问题,基于半实物仿真技术开展电液悬挂控制系统试验研究,对拖拉机和悬挂装置受力分析,建立拖拉机、悬挂装置的动力学模型,对悬挂系统横向仿形控制、位控制、牵引力控制以及力位综合控制原理进行分析,设计电液悬挂模糊PID控制器,试验结果表明模糊PID控制性能优于经典PID控制。周浩等[34]设计了一种旋耕机自动调平系统,通过 PID 控制器控制电磁换向阀,油缸动作实现农具的自动调平。刘林[35]设计的农具自动调平系统,通过液压换向阀来控制液压缸运动,实现农具的自动调平,其控制精度有待提高。
山地拖拉机与农具姿态协同调整控制方面:张锦辉等[36]采用神经网络PID同步控制算法,设计了一种山地拖拉机姿态同步控制系统,实现了车身和农具姿态的同步调整,其控制精度和调整速度均能够满足作业的需求。杨福增等[37]针对山地履带拖拉机等高线作业时车身调平和农具仿形作业不同的姿态调整需求,在建立车身及农具运动学模型的基础上,设计了车身与农具姿态协同控制系统,如图17所示,该系统对车身和农具的控制分别采用PID算法和双闭环模糊PID算法。基于Simulink对控制算法进行了仿真分析,结果表明采用双闭环模糊PID算法实现农具姿态调整的控制效果优于PID算法,机组姿态协同调整的静态、动态实地试验结果表明该姿态协同控制系统精度和稳定性能够满足丘陵山区坡地等高线作业需求。
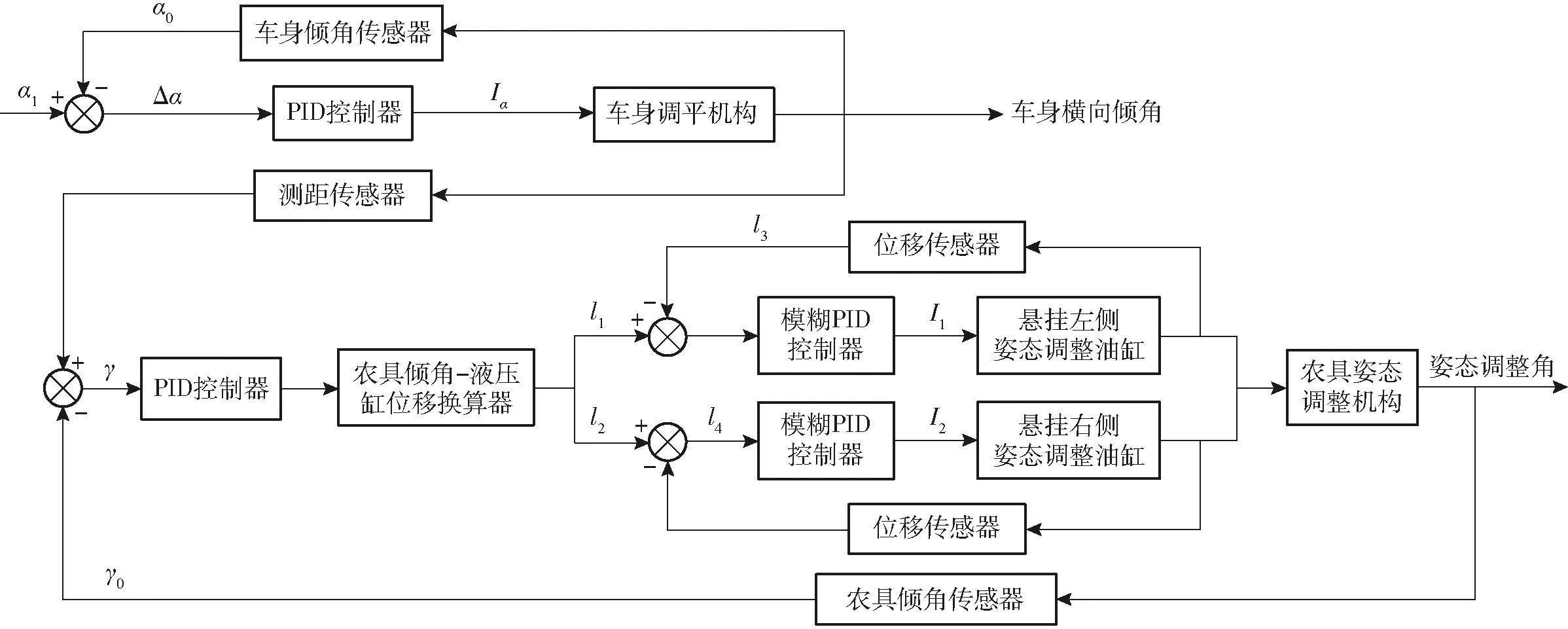
图17 山地拖拉机与农具姿态协同控制系统原理图
综上,国内外专家学者针对山地农机在坡地调平技术方面开展了一定的研究工作,主要是通过创制适宜山地环境的农机调平机构,进而搭建专用的控制系统,设计高效精确的控制策略和算法来实现山地拖拉机机身的姿态调平或者山地动力机与作业机的协同姿态调整。目前,主要完成了室内及坡地试验,需进一步提高机械本体以及控制系统的可靠性,加快推广应用。
1.4 山地拖拉机驱动与动力系统研究现状
丘陵山区的农机工作条件相对比较恶劣,机耕道路狭窄、地块小、坡度大,而拖拉机机身存在体积大、操作困难、稳定性差等现实问题,这些因素均限制了丘陵山地拖拉机的发展,特别是坡地作业时车轮、履带滑移滑转现象导致拖拉机的驱动力不足,会严重影响作业效率和质量。国内外专家针对该问题做了相关研究。
目前国内大多通过构建拖拉机坡地作业动力学模型,并结合仿真试验完成驱动与动力系统设计,进而开展相关研究。LIU等[38]针对中型山地履带拖拉机坡地作业时调速范围小、操纵复杂、安全性低等主要问题,设计了一种适用于山地履带拖拉机的静压驱动系统。根据山地拖拉机的使用要求,在分析拖拉机受力与运动学的基础上完成驱动系统中的柴油发动机、静压传动(HST)、驱动后桥等关键部件的参数匹配,搭建了驱动系统性能试验台,对驱动系统的牵引性能和起动加速性能进行了测试,台架试验结果表明该驱动系统的设计合理,转速一致性好,有足够的动力储备,能满足坡地作业的动力需求。李江等[39]针对丘陵山地四轮驱动拖拉机作业时车轮打滑导致驱动力不足的问题,优化设计了拖拉机传动系统关键部件,并建立拖拉机动力学模型,对轮间驱动力进行分析,提出了提高驱动效率最佳条件;设计了新型驱动力分配装置以对轴间驱动力重新分配,并搭建控制系统完成仿真试验,结果表明该装置能明显改善打滑现象,提高山地拖拉机的驱动性能。扈凯等[40]针对传统拖拉机难以适应丘陵山地复杂工况的问题,设计了一种丘陵山地拖拉机全液压驱动系统;根据工况需求,驱动系统采用单泵四马达的闭式回路,并使用同步马达防止车轮滑转,基于AMESim软件建立液压系统模型并完成仿真,仿真结果表明液压系统满足工作需求;在同步马达不工作时,拖拉机单个车轮滑转会使得系统丧失驱动能力,系统工作压力仅为1.838 MPa,当同步马达强制分流时,系统工作压力为19.197 MPa,可使拖拉机重新恢复驱动力,该研究方法为山地农机液压驱动系统的设计提供参考。范永奎等[41]针对丘陵山地拖拉机工作时需要调平车身,悬挂装置实时调节以适应地形变化的具体问题,设计了一种适用于山地拖拉机复合作业的液压多点动力输出系统;基于AMESim软件建立多点动力输出系统的仿真模型,仿真结果表明系统压力调整时间约0.1 s,几乎无超调;室内试验验证了液压系统具有负载反馈、压力补偿和流量分配等功能。
综上所述,学者针对山地拖拉机驱动与动力系统的研究主要为集成静液压无级变速(HST)驱动系统、全液压驱动、轮间驱动力分配、液压多点动力输出等,较多地集成工业领域的现有技术或者产品。在后续研究中,急需紧密结合丘陵山区的地形地貌特点,重点突破高效轻量化液压机械无级变速器(HMCVT)驱动技术,解决核心部件的技术难点,融合复杂工况与高效传递的关系,实现作业速度的自适应匹配与调控,确保整机工作的动力性、连续性、经济性和安全性[42-46]。
1.5 山地机具与作业性能研究现状
1.5.1坡地作业机具研究现状
针对丘陵山区地块面积小、机耕道路狭窄,大型农业装备运输难、进地难、转场难、操作难等现状,国内的科研机构着重对丘陵山区坡地中小型作业机具进行了研究。
坡地耕整地机具方面:有关坡地耕作机具的研究较少,耕整地还是以小型微耕机作业为主,操纵难度较大,急需研制高效灵便低耕作侵蚀的耕整地机械,从而提高耕作后的坡面平整度,保证后续播种深度的均匀性。坡地播种作业机具方面:丘陵山区地形复杂的小地块播种杂粮时,主流方式是小型拖拉机与机械式排种器配套使用,但机械式排种器在倾斜条件下作业会导致种子在型孔中充填性能下降,从而使重播与漏播现象加剧。为解决上述问题,贾洪雷等[47]设计自吸式绿豆精密排种器,该机气力式排种器坡地作业抗干扰能力强,无需风机提供负压,可节省功耗,满足丘陵坡地等小地块精密播种作业的需求。坡地收获作业机具方面:针对丘陵山区地形和胡麻收获特点,史瑞杰等[48]设计了一种履带式丘陵山地胡麻联合收获机,该机采用防缠绕低损割台、纹杆+杆齿组合式小锥度横轴流脱粒滚筒、组合式窄栅格凹板等结构实现了胡麻茎秆的防缠绕快速喂入、分段式脱粒与分离、清选等作业,并进行田间验证试验。并且,该团队以丘陵山地胡麻联合收获机初选、精选复式清选系统工作模式为研究对象,分别建立初选系统、精选系统 CFD 模型和胡麻脱出物DEM模型,采用 CFD-DEM 联合仿真技术,研究丘陵山地胡麻联合收获机复式清选系统最佳工作参数和脱出物各组分运动轨迹及空间形态变化,得出丘陵山地胡麻联合收获机脱出物分离规律,并进行试验验证仿真模型的可靠性[49]。针对丘陵山地玉米种植地块多而碎小制约玉米机械化收获的现状,耿端阳等[50]设计了一款履带式坡地玉米收获机,实现丘陵山地复杂地形条件下玉米的机械化收获;该收获机采用横辊摘穗技术,解决了传统摘穗辊喂入性不流畅和复杂地形下玉米植株的喂入问题。
综上所述,目前国内针对丘陵山区的主要作业机具研究有杂粮播种、胡麻收获、玉米收获等,坡地耕作机械、坡地田间管理(施肥、施药等)机械尚缺乏,因此急需针对我国丘陵山区地域广、作物种植多样化的现状,从区域性差异、土壤类型差异、作物种类差异、农艺要求差异等方面着手,研发适宜于区域性丘陵山区作业的专用机具,例如:坡地高效低侵蚀的耕作机械、大豆玉米带状复合种植专用机械、果园茶管理机械、油菜低损收获机、油茶果收获机、大宗茶自走式收获机等。
1.5.2山地机具行驶作业性能研究现状
根据山地实际作业地形特点,对山地动力底盘的坡地通过性、越障性等进行相关理论分析,对于坡地高通过性关键结构参数的确定及关键零部件的创新设计具有实质指导意义。
在山地机具行驶作业性能研究方面,主要的研究思路是针对特定作业场景中存在的问题,通过对农机具行驶作业过程构建模型进行理论分析,并结合多体动力学软件进行仿真,最终开展田间试验进行探究。韩振浩等[51-52]为了探究山地果园底盘坡地通过性能的关键结构参数,提高其在复杂行驶路况下的地形适应性,结合山地果园的地形特点,分别对斜坡平地通过性和斜坡越障通过性进行了理论分析,并基于RecurDyn软件进行仿真分析,为底盘的优化设计提供了理论参考。吉旭等[53]针对贵州山地土质松软,地块小、坡度大,现有辣椒收获机作业困难等问题,设计了一种适用于丘陵山地的履带自走式辣椒收获机,基于RecurDyn软件对收获机的横坡行驶、纵坡上坡、纵坡下坡、翻越垂直壁和跨越壕沟等行驶作业工况进行动力学仿真,进行田间试验验证了收获机的稳定性和通过性。潘冠廷等[54]针对小型山地拖拉机坡地行驶时,常遇台阶、砖头、石块、田埂等障碍,严重影响通过性及稳定性,引发侧滑甚至倾翻等安全问题,选取台阶为越障对象,基于经典力学分析、RecurDyn软件仿真的方法对山地拖拉机的爬坡越障性能进行了研究,并实地试验验证了所建立的理论及仿真模型在坡度0°~15°范围内的有效性。孙景彬等[55]针对山地履带拖拉机坡地等高线作业时,坡地土壤内部应力分布规律不明确以及如何提高应力均匀性缓解土壤压实等问题,基于EDEM-RecurDyn耦合仿真、土压力盒埋设法分别开展了仿真试验、基于小型坡地土槽的静态试验以及坡地动态试验;其中,静态试验探究了不同深度土壤在含水率、初始紧实度、加载质量及坡地角等影响下的垂直应力分布规律;动态试验探究了山地履带拖拉机坡地等高线行驶/旋耕作业时履带下方土壤应力随作业速度、车身状态(调平/未调平)及牵引负载的变化规律;并分析了履带张紧力对土壤垂直、水平应力分布的影响。
综上所述,国内学者对于山地农机具行驶、作业性能的研究尚处于起步阶段,主要是研究直线行驶的稳定性、通过性,关于山地农机坡地转向、农机大负载作业时的稳定性、直线行驶性、牵引附着性等方面的研究相对较少,尤其应注重深入研究山地农机作业载荷特性与分布规律,构建山地农机作业载荷谱,从而有效指导高可靠性调平机构及行走系统的设计。
2 农机土壤压实与耕作侵蚀研究现状
2.1 农机土壤压实研究现状
土壤压实是土地退化的一个重要过程,该过程限制根系的生长,影响作物根系对土壤中水分和养分的吸收,进而造成作物减产[56]。土壤压实的程度取决于农业机械的轮胎/履带接触土壤后应力的传递情况,土壤内的应力是机械的重力所引起的垂直(压缩)应力和水平(剪切)应力的组合[57],当土壤内垂直应力超过土壤抗压强度发生压缩形变,水平应力超过土壤抗剪强度时,土壤发生剪切形变[58]。
对于轮式拖拉机,轮胎的参数对土壤的压实具有显著的影响, BOTTA等[59]研究了轮胎的参数对土壤压实的影响,结果表明:对于表层土壤,子午线型轮胎相较于斜交线型轮胎可降低对土壤的压实,轮胎的气压对表层土壤的压实影响显著;深层土壤的压实与轮胎的参数、气压均无关。LAMANDE 等[60]研究了土壤在荷载作用下的应力和变形,在大型土箱中进行了二维的竖向应力和位移测量,距离地平面4个深度(30、50、70、90 cm)中共设置了21个传感器,研究了两种载荷(43、85 kN)、两种接触面积(0.45、0.90 m2)对土壤垂直方向应力的分布与传递特性的影响。该团队还从3个维度(不同深度、不同轮胎宽度、不同行驶方向)实测土壤在轮胎尺寸、轮胎充气压力和轮胎载荷不同组合影响下的垂直应力,结果表明接触应力对土体剖面应力传递具有显著影响。王宪良[61]以轮胎为研究对象,基于模型分析、离散元仿真、田间试验等方法,研究了轮胎运动过程中引起的土壤压实现象,建立了轮胎压实影响因素与土壤容重和紧实度之间的关系;结合EDEM-RecurDyn耦合模拟轮胎压实土壤的过程,分析了轮胎轴载及压实次数对土壤应力传递的影响规律,建立了土壤应力传递模型。
履带拖拉机的接地比压大,对土壤的压实作用较轮胎小,因此被广泛采用[58],但是,履带行走机构是由柔性的履带将导向轮、支重轮和驱动轮包络起来,其与地面的接触关系复杂,会导致接触面应力和土壤内部应力传递的不均匀,进而增大履带在松软地面的沉陷程度,影响机械的通过性[56]。KELLER等[62]研究了履带压实效应下0.3 m深度范围土壤中垂直应力在履带长度方向变化情况,得出垂直应力分布很不均匀,其最大值大约是平均值的3.2倍。LAMANDE等[63]分析了同一车辆分别使用轮式和履带式行走装置情况下对土壤的压实作用,测定了橡胶履带与土壤接触面内垂直应力在履带长度方向的分布规律,得出在支重轮的轴线处出现峰值。丁肇等[64]通过钻孔埋设传感器的方法研究了履带式行走机构对土壤压实作用下应力分布规律,为行走结构优化提供理论依据。赵子涵等[65]分析了地面紧实程度和车辆荷载对垂直应力分布情况的影响,结果表明,在紧实地面环境中,支重轮间履带几乎不受力,应力的分布是非连续的;松软地面环境中,履带均受力,应力分布连续,支重轮下应力均匀度随荷载增大而升高。栗浩展等[66]分析了金属履带行走系对土壤内垂直应力的影响规律,得出垂直应力在履带长度方向的分布形状近似三角形,支重轮轴线位置出现最大应力。PAN等[67]对坡地工况下土壤压力-沉陷模型进行了构建与验证,主要针对经典Bekker土壤压力-沉陷模型中未考虑坡地角度、土壤含水率、土壤密度等参数的变化问题,进行了平板穿入试验验证了土壤含水率及密度对土壤承压特性的影响显著;基于二次旋转正交组合试验方法,引入坡地角度再次进行平板穿入试验,计算求得4种土壤的承压特性参数,将承压特性参数回归方程带入经典的 Bekker 承压模型进行拓展,得到坡地土壤压力-沉陷的模型。
由此可见,目前农机土壤压实方面的研究主要是从轮胎/履带对土壤接触应力和土壤内部传递应力等方面来展开,并且轮胎对土壤压实的研究居多。针对履带压实土壤的研究主要是拖拉机参数、履带参数、土壤参数等对土壤内部垂直应力、水平应力的分布均匀性影响规律,研究工况多为平地工况、坡地工况下的土壤压实机理和规律有待进一步探究。
2.2 土壤耕作侵蚀研究现状
土壤的耕作侵蚀是土壤在耕作机具的直接作用下发生分散、搬运、沉积的过程[68],专家学者在土壤耕作侵蚀方面做了一定的研究。杜志勇等[69]对耕作土壤侵蚀进行了阐述,经试验得出土壤位移可用3种不同的运动(牵拉、掷跳、翻滚)公式来描述,并可以指导耕作工具的设计。
由于耕作过程中土壤运动较为复杂,目前国内大多采用示踪技术对土壤颗粒进行标记,进而探究耕作过程中的土壤侵蚀规律。王占礼等[68,70]以我国黄土区为研究对象,将小立方块作为示踪材料施放于土壤中来示踪和监测土壤的运动,对黄土地区耕作(牛拉铧式犁横坡耕作)侵蚀过程中的土壤再分布规律进行了研究;采用137Cs示踪技术研究了耕作(牛拉铧式犁横坡耕作)侵蚀过程中土壤中营养成分(全氮、碱解氮、有效磷、速效钾含量)的影响规律,得出土壤养分含量在耕作侵蚀区呈减少趋势、在耕作沉积区呈增加趋势[71]。樊红柱等[72]采用137Cs示踪技术探究了川北山区坡耕地土壤再分配对土壤有机碳和团聚体有机碳含量的影响,可有效指导该地区的施肥管理。殷爽等[73]通过模拟试验的方法探究了东北黑土区农田土壤团聚体有机碳受水侵蚀和耕作侵蚀的影响规律,为黑土质量退化问题的进一步研究提供参考。王勇等[74]采用模拟顺坡耕作的方法研究了长期耕作对坡地不同位置土壤水稳定团聚体和水分分布的影响规律,得出坡上侧的土壤水贮量明显降低,坡下侧的土壤持水能力明显升高。苏正安等[75]通过分析耕作侵蚀对土壤肥力和作物产量的影响研究进展得出,构建精确的耕作侵蚀模型以及深入研究其与其他侵蚀类型(如水蚀、风蚀)等相互作用机制可为我国土壤侵蚀的防治提供指导。赵鹏志等[76]采用物理示踪法研究了典型坡耕地耕作(铧式犁耕作)的位移以及土壤的分布状态,得出坡度对耕作位移的影响显著,耕作深度和速度影响侵蚀的严重程度。李富程等[77]采用磁性示踪(钛铁矿粉)的方法研究旋耕机不同耕作深度下对坡地紫色土的位移影响,得出耕作深度越大,土壤净位移和耕作侵蚀速率越大;采用磁性示踪(钛铁矿粉)的方法研究耕作速度对等高耕作和向下耕作和向上耕作土壤侵蚀的影响,得出耕作速度对等高和向下耕作的土壤侵蚀有明显影响,对向上耕作的影响相对较小;采用磁性示踪(钛铁矿粉)的方法研究旋耕机等高耕作对土壤中碳氮分布规律的影响,得出坡上侧土壤中有机碳和全氮含量显著减少[78-79]。
综上所述,已有研究主要针对的区域和作业工况分别是黄土区的牛拉铧式犁横坡耕作、东北黑土区典型坡面的铧式犁耕、川北山区的顺坡耕作及紫色丘陵区的顺坡机耕等。针对我国不同丘陵地区的不同土壤类型,特定适宜作业模式下的坡地耕作侵蚀机理研究尚不全面,有必要深入研究不同作物种植区、不同耕作机械作业模式下的耕作侵蚀规律。
3 农机设计及农机-土壤互作机理研究方法
山地农机-土壤-作物互作机理的研究可充分借鉴平原地区的研究经验。高可靠性先进农机装备的研发对于促进我国农业现代化的实现意义重大,多体动力学已经逐步应用到农机的研发过程中,其可以在农机样机实现之前就对产品设计进行有效指导,缩短产品开发周期,减少产品开发费用[80]。传统农机作业性能的评价主要是通过室内台架、土槽试验以及田间试验的验证来完成的,但是,土槽、田间试验只能分析土壤的宏观状况,不能从微观的角度去剖析运移特性[81],大量研究表明,离散元法可以模拟分析土壤颗粒与农机具之间的互作用关系,可为先进适用机具的创新设计提供新方法[82]。
3.1 基于多体动力学法
目前,国内有较多学者使用多体动力学软件构建农机-土壤互作模型,并结合仿真分析及试验测试结果,开展农机-土壤互作机理研究,为专用农机具的创制提供技术参考。扈凯等[83]以高地隙三角履带底盘为研究对象,基于多体动力学分析的方法建立履带底盘各组件及车体的拓扑结构模型;构建承重轮-履带接触模型、履带张紧力模型和履带软地面接触模型;建立三角履带底盘的三维模型,采用谐波叠加法构建了水泥硬质路面和农田软质路面的路谱,完成模型仿真与测试验证,结果表明三角履带底盘多体动力学模型具有较高的精度。刘妤等[84]以小型农用履带底盘为对象,运用极限理论和瞬态运动分析法建立底盘的运动学方程,运用拉格朗日法建立底盘的动力学方程,结合底盘的拓扑结构建立其多体动力学模型,经不同路面环境下直线行驶的实车试验与仿真结果对比验证了模型的有效性。陈黎卿等[85]针对秸秆还田机功耗测试难的问题,提出了利用虚拟测试平台评估还田机功耗的方法,建立秸秆还田机的动力学模型,对秸秆还田机的功率消耗进行了虚拟仿真,构建了田间功耗测试系统,通过对比仿真数据验证了该种测试方法的准确性。康建明等[86]针对圆盘式开沟机功率消耗测试结果受环境、设备精度影响较大等问题,基于多体动力学提出了利用虚拟测试平台评估圆盘式开沟机功率消耗的方法。
由此可见,充分借鉴传统农机基于多体动力学法开展设计和试验的经验,将该方法运用到山地农机装备的研发当中,将提高产品研发效率,缩短研发周期,节约成本,有助于新型山地农机产品的快速推广应用。
3.2 基于离散元法
农具部件与土壤之间的相互作用受到土壤性质及土壤动态作用的影响,对不同类型的土壤,其影响效应差异显著,因此,在基于离散元法开展农具部件与土壤互作机理研究之前,还需对土壤颗粒间、土壤与触土部件间的仿真参数进行标定。
目前,国内外专家学者基于离散元法在土壤等散状物料参数标定、土壤与农机互作关系研究方面做了大量工作。UCGUL等[87]综合Hertz-Mindlin及Hysteretic Spring典型模型研究了土壤颗粒间的粘结力对其塑性形变的影响规律。AIKINS等[88]整合Hysteretic Spring模型和Linear Cohesion模型对高黏度土壤的静摩擦因数和滚动摩擦因数进行了标定,并经开沟试验验证了参数标定的准确性。ZENG等[89]建立了土壤-农具-秸秆残茬相互作用的离散元仿真模型,并以4种不同的铲进行仿真试验和土槽试验,最终验证模型的有效性。MILKEVYCH 等[90]基于离散法建立了除草过程中土壤与触土部件相互作用引起土壤位移的研究模型,模拟试验和实测试验表明土壤位移具有一致性。UCGUL等[91]采用离散元法模拟了土壤与板型犁之间的相互作用,经仿真试验与实地试验比较耕作牵引力以及犁沟剖面,结果表明离散元法精度可靠。石林榕等[92]基于延迟弹性模型和线性粘附模型的优点对6种含水率的农田土壤进行模型参数标定,经鸭嘴插穴试验验证了模型的有效性。张锐等[93]基于Hertz-Mindlin模型,经过堆积角试验完成沙土颗粒的模型参数标定。李俊伟等[94]基于Hertz-Mindlin with JKR Cohesion 模型标定了东北黑土颗粒接触参数及其与触土部件间接触参数,为高含水率黏土参数标定提供参考。向伟等[95]经堆积试验完成了南方黏壤土的仿真参数标定,成穴试验验证了标定参数的有效性。邢洁洁等[80]基于Hertz-Mindlin with JKR模型完成含水率7.8%海南砖红壤颗粒间、砖红壤与28MnB5板间接触参数的标定,为砖红壤香蕉地触土作业部件的研制提供模型。马帅等[96]综合延迟弹性模型和线性粘附模型的优点,经堆积试验、斜板试验构建了葡萄藤防寒土离散元仿真模型,为专用刮土机的设计提供数据。田辛亮等[97]选用Hertz-Mindlin with JKR接触模型对黑土区玉米秸秆-土壤混料的离散元仿真接触参数进行标定,试验验证了仿真模型参数的可靠性。孙景彬等[98]针对黄土高原坡地土壤旋耕部件互作机理研究以及坡地专用旋耕机具设计缺乏准确可靠离散元仿真参数的问题,对坡地土壤与旋耕刀互作的离散元仿真参数进行了标定,并通过坡地旋耕试验验证了参数标定的可靠性。熊平原等[99]基于离散元的方法建立了旋耕刀与土壤之间的仿真模型,分别完成了旋耕作业仿真、土槽试验,测定了作业过程中所受到的扭矩,对比仿真、土槽试验结果来验证所建立的模型准确性。方会敏等[100]对旋耕刀与高秸秆含量土壤相互作用下土壤运动行为进行了宏观与细观的分析及对比。胡建平等[101]构建了双轴旋耕-秸秆-土壤的耕作仿真模型,分析了双轴配置参数对功耗的影响。
综上可知,离散元法在农机设计和虚拟试验中发挥着极为重要的作用,目前已经成为解决与散粒体相关的问题主要研究方法之一,凡涉及颗粒流动、破碎、混合等现象的应用都可以采用离散元法得到较好的仿真分析结果[81]。因此,丘陵山区农机装备与土壤的互作机理研究问题同样可以采用离散元法得以解决。但是,实际农业生产过程中涉及复杂的几何体运动和多相流问题,单纯依靠离散元法分析软件已不能达到复杂的仿真要求[81],多软件耦合已经成为离散元法发展的一个重要方向,因此,在大型或结构复杂农机装备应用中,离散元软件与其他 CAE 工具耦合使用,如 CFD(计算流体动力学)、FEA(有限元分析)、RBD(刚体动力学)、MBD(多体动力学)等分析方法。
4 展望
我国丘陵山区农业机械化水平是国家实现农业农村现代化的重要基础,近些年在国家和政府部门的政策鼓励与支持下,企业、科研院所等机构的共同努力下,丘陵山区农机装备的研发具备了一定的基础,专家学者也在种植制度宜机化、生产装备配套性适宜性等方面提出了系列合理化建议。但目前丘陵山区农业生产发展存在的短板问题仍较为突出,相关装备机具与作业技术仍处于实验阶段,耕、种、管、收、运各生产环节中高效低损智能化机具研发推广仍有很大提升空间。建议未来丘陵山地农机装备及坡地作业技术围绕图18所示几方面展开重点研究。
4.1 山地农机-坡地土壤-作物(养分)互作机理研究
丘陵山区地形地貌复杂,坡地土壤的类型及物理性质、地貌的几何特性等均影响到山地农机装备的爬坡、越障、制动、侧滑、倾翻等行驶性能和耕作、播种、田间管理、收获等作业性能,因此为了研发适应于丘陵山区自然条件的专用山地拖拉机及配套机具,首先必须研究该地域土壤的物理特性及其与农机行走机构的相互作用关系,研究山地农机装备行驶及作业对坡地土壤理化成分的影响机制与效应,开展系统全面的山地农机-坡地土壤-作物(养分)互作机理研究。
4.1.1山地农机载荷谱构建
载荷对山地农机装备的性能影响最大,原因在于农机零部件最基本的功能是承受载荷。载荷条件对山地农机的设计、分析、制造及试验起重要作用。山地农机所承受的载荷为较大的随机载荷,与其作业的环境、土壤特性及作物类型、农艺特点关系巨大,随机载荷极易引发疲劳失效,影响农机装备的安全性及作业效率。然而,这种随机载荷的性质、载荷来源、载荷分析与载荷确定方法等较平原地区更加复杂,国内尚未进行深入研究。因此,重点研究山地农机作业载荷特性与分布规律对于指导关键部件设计、预测零部件寿命、产品可靠性分析具有重要意义。
4.1.2坡地耕作降蚀技术
耕作侵蚀对地形的演化、土壤性质的改变、土壤养分的流失与重新分布、地表生产力的降低均有重要影响。坡地工况的耕作侵蚀会导致坡高侧的土壤耕作层变浅,坡低侧土壤严重堆积,改变原始坡地形貌,影响后续机械化仿形作业,而且会降低土壤的肥力,影响作物产量。然而,等高线耕作是山区农业生产最基本、最重要的耕作方式之一,耕作侵蚀现象也随之产生,威胁到坡地土壤的质量以及水土流失的防治工作。因此,在丘陵山区坡耕地的实际作业过程中,应从降低土壤侵蚀、水土流失的思路出发,基于农艺要求及当地农业高效生产方式,在传统的耕作方式(旋耕、犁耕、深松等)中选择更为适宜的模式,并深入开展耕作减蚀技术研究,揭示不同耕作模式下山地农机-坡地土壤的互作耦合机理,为高效低侵蚀坡地农机具的研发提供理论支撑。
4.1.3坡地保护性耕作与生态沃土技术
保护性耕作技术目前在平原地区已经有了较长时间的发展,其主要内容是以秸秆覆盖、少耕或免耕播种、深松和地表害虫综合治理为主要内容的现代科学耕作技术体系。保护性耕作技术不仅具有改善土壤结构、增加土壤有机质、节水保墒、提高农田生产力的功能,还具有减少温室气体排放、降低能源消耗、抑制农田退化等环境效益。因此,丘陵山区大力提倡保护性耕作及生态沃土技术对我国实现“碳达峰、碳中和”目标具有实际推动作用。重点应从坡地农田的规模化建设、保护性耕作替代传统翻耕、智能化替代机械化、绿色农药替代传统化学农药、有机肥替代化肥等方面开展,以达到改善土壤结构,培肥地力之目的。
4.1.4坡地养分再分布及精准调控技术
无论是传统耕作方式,还是保护性耕作,在耕作后土壤的养分分布情况会发生较大的变化,这一变化对坡地种植作物的生产差异性具有更加严重的影响。因此,针对坡地农田的种植农艺要求,研究坡地耕作后土壤养分重新分布规律,对于坡地土壤的综合地力提升具有实际指导意义。目前丘陵山区存在大量中低产坡耕地,其特征表现为土壤结构不良,有机质贫乏,保水保肥能力差,抗侵蚀能力弱等,应充分借鉴平原大田中土壤碳氮调控及主要农作物有机无机养分精准调控的先进技术,开展中低产坡耕地土壤流失阻控、土壤障碍消减、土壤有机质快速提升、耕层结构优化、土壤有机碳库容提升等关键技术研究,进而构建中低产坡耕地农业体系“点-线-面”立体防蚀与多源增碳绿色生产技术模式,助推丘陵山区农业高质量发展。
4.2 山地农机高效可靠姿态调整机构与协同控制策略
姿态调整机构与控制策略是山地农机装备较为重要的理论,原因在于山地农机所行驶的路面、作业的条件复杂多变,会导致较大的功率消耗和车身失稳,甚至引发安全事故。研究山地农机的姿态调整原理,有助于设计更加合理的姿态调整装置以提高山地农机的行驶、作业稳定性,从而保证安全性。目前,国内该方面的研究尚未成熟,需要全面、系统地运用数学、力学、运动学等理论对山地农机装备在山地行驶、作业的运动学及动力学规律展开分析研究,为设计、制造高质高效的姿态调整装置提供理论指导。
4.2.1山地农机行驶作业全过程姿态调整原理
基于理论推导、仿真分析、台架试验及实地试验相结合的方法研究山地拖拉机在坡地多工况(爬坡、下坡、等高行驶与作业、顺逆坡行驶与作业、坡地转向、越障等)全场景下的机组动力学,分析创新机构姿态调整过程的平顺性、稳定性以及强度可靠性,尤其要确保动力机械姿态调整后仍然具备较好的牵引附着性能,避免出现轮胎或履带“线”接触于地面的情形。
4.2.2山地农机机组协同姿态调平控制策略
丘陵山区地形复杂,地面差高大,坡度特征明显,致使山地农机作业时发生不连续的姿态变化,尤其是动力机进行牵引作业时,悬挂农机具的位姿会随动力机械位姿的变化而改变,导致农具姿态不能始终与坡地保持平行,严重影响坡地作业质量,难以满足坡地作业要求。因此,在实现机身姿态自适应调控的同时,着重探究实时高效的机组(动力机械+作业机械)姿态协同控制策略,攻克协调控制智能算法,为坡地高效高质量作业提供保障。
4.3 山地农机动力高效传递与灵便转向驱动
鉴于丘陵山区地块碎小的现状,山地农机整机布局应尽可能紧凑,根据山区农业要求,重点突破高效轻量化 HMCVT 驱动技术,解决核心部件的“卡脖子”问题,融合复杂工况与高效传递的关系,实现作业速度的自适应匹配与调控,确保整机工作的动力性、连续性、经济性和安全性。突破电液比例动力输出关键技术,提升动力机与农具适配性。以动力机转向时的整车速度、行驶驱动力及转向驱动力矩为约束,优化转向机构的特性参数[102],研发高效灵便的转向驱动系统,设计不同工况下的转向控制策略,实现复杂多变工况的可变半径转向,以满足碎小地块作业转向需求。
4.4 山地农机作业智能化监测与精确自主导航
丘陵山区农业装备的推广应用会极大提高农业生产的效率和质量,但是该地域地形复杂多变性给操纵人员、农机本身带来了一定的安全隐患。为更好地保证安全性,急需创制动力机行驶速度、机身姿态、液压系统压力流量、山区作业环境、作业负载等传感信息以及发动机转速、PTO转矩转速等发动机 ECU 工况信号采集传输终端与远程监测系统;开发远程实时故障诊断系统。为了实现高效低损作业,急需研究丘陵山区非标准地块复杂场景下的精确自主导航技术、精准识别避障技术。
4.5 山地农机设计与农艺及坡地作业场景深度融合
针对丘陵山区不同地域的作物生产差异,作物的耕作、播种、施肥施药管理、收获(采摘)、运输等作业环节的“无机可用”、“无好机用”的普遍现实问题,突破高效低侵蚀耕作技术、机械化覆膜精量播种技术、小型智能施肥(施药)机械化作业技术、小地块低损机械化联合收获技术、山区坡地高稳定性运输技术,创制核心零部件,开发相应的农机装备,实现薄弱环节的机械化和一定程度的智能化。山地农机具应尽可能小型化;动力机尽可能通用化,并具备作业装置模块化快速换装功能,配套灵活,实现一机多用,提高动力机的适应性和利用率。
我国丘陵山区广泛分布于我国西北、西南、 华北和东南等区域,各地地形、土壤类型、作物种类、种植模式等差异较大,现有山地农机针对性不足,难以适应各地生产需求。因此,山地农机装备的整机开发应立足于不同的地域条件,紧密结合当地农艺要求,根据区域土壤类型、气候特点、种植规模、专用作物生产机具的性能,优化专用适用型农机装备整机开发方案,并研究制定区域性主推耕作模式和技术标准。并重点推进丘陵山区适用农机的专项鉴定,落实农机新产品购置补贴试点政策,加快适宜型农机具研发成果的转化应用。
对于农业作业环境极其恶劣的丘陵山区,应该考虑通过农田宜机化改造来为农机装备提供条件,即“改地适机”,宜机改造工作经过科学、客观的分析判断,对适宜于机械化作业的土地进行整治,针对不同地域、不同坡度及独特生态环境,形成各地域独有的丘陵山地农田宜机化改造技术方案。