一种树生水果采摘机器人的结构设计*
2023-05-26黄保赛赵栋杰张伟涛
黄保赛 ,赵栋杰 ,张伟涛 ,张 赛
(聊城大学机械与汽车工程学院,山东 聊城 252000)
0 引言
随着我国农业生产水平的不断提高,果园面积和水果产量稳步提升,均位居世界前列[1]。水果采摘是现代农业生产中较为耗时耗力的一个环节,采摘作业的质量和效率直接影响了市场经济效益。目前,我国果蔬采摘作业仍以传统的人工采摘模式为主,这种传统的人工采摘方式不仅劳动强度大,劳动力成本高,而且效率相对较低。尤其对于某些地方果树密度大、果实生长密集等情况,水果采摘存在非常大的困难。因此,实现果蔬采摘机械化、智能化具有非常重要的意义[2-4]。
农业采摘机器人发展十分迅速,美国、日本、荷兰等发达国家已经针对不同水果研究出相应的采摘机器人原型机,走在农业机器人研究的前列;我国对于农业采摘机器人的研究起步略晚,但近些年发展迅速,也取得了比较丰硕的成果[5]。在水果采摘领域,已有文献报道的采摘机器人产品有Johan Baeten等[6]研制的负压夹持式苹果采摘机器人,日本大阪府立大学的Tanigaki等[7]研制的四自由度铰接式樱桃采摘机械臂,江苏大学的赵德安等[8]设计的苹果采摘机器人,湖南农业大学的王韧[9]研发的果蔬采摘的冗余七自由度串联关节型机械臂,重庆理工大学的张茂[10]设计的柑橘采摘机器人。
上述农业水果采摘机器人多采用刚性关节型机械臂,普遍存在灵活性受限、质量大等缺点[11-12],难以满足某些地方果树生长密集、果实错落分布等情况的采摘需要,并且生硬的机械臂容易对果实造成一定的损伤,人在操作时也具有一定的安全隐患[13-16]。基于此,本文模仿大象鼻子的运动机理,设计了一种拉绳驱动的仿象鼻柔性采摘机械臂,并基于该机械臂设计了一种树生水果采摘机器人。
1 总体设计方案及工作原理
1.1 总体结构
该树生水果采摘机器人的整体结构主要由机械爪部分、机械臂部分、收集装置部分、车身部分组成,总体结构示意图如图1所示。
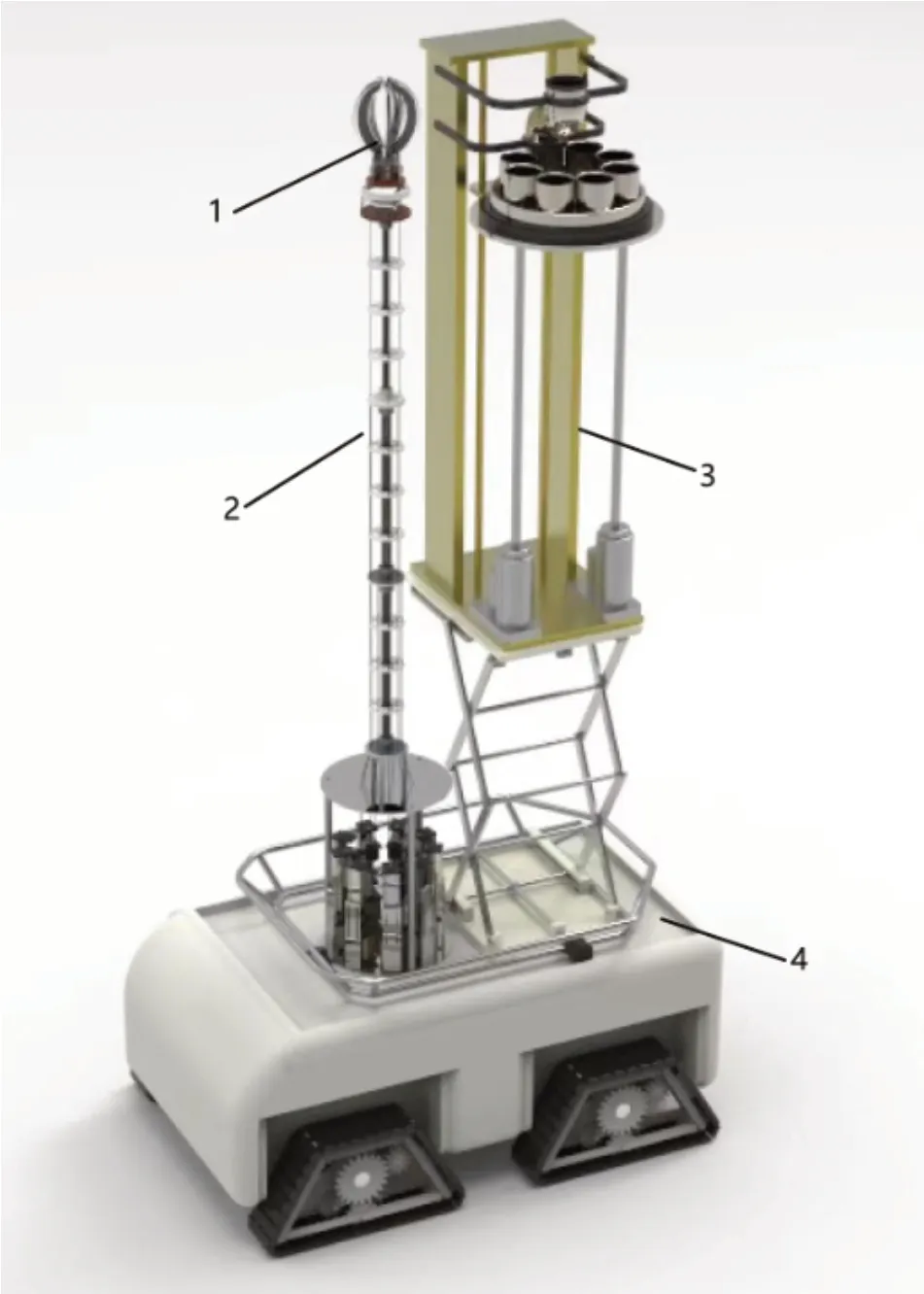
图1 总体结构示意图
其中,机械爪部分的夹持手指采用柔性材料,用于夹裹目标果实;机械臂部分由三段串接的柔性关节段组成,可实现多自由度、较大幅度的柔顺弯曲运动,用于实现机械爪在抓取、采摘过程中所需的各种柔性运动;机械爪和机械臂均采用拉绳驱动,由驱动底座的直线模组提供动力;配合可升降的收集装置部分,能有效缩短机械臂的运动行程,进一步提高采摘效率;机械臂和收集装置安装在车身上,车身还带有水果收集箱,采摘后的水果可以储存在车身上的收集箱中。
1.2 工作原理及流程
该树生水果采摘机器人运动到指定采摘位置后,首先,收集装置部分的一级升降装置和二级升降装置升高到一定高度,完成准备工作。其次,机械臂的驱动底座进行工作,拉动拉绳使得机械臂到达要采摘水果的位置。到达指定位置后,控制机械爪运动的拉绳也被拉动,机械爪完成闭合和旋转,从而完成采摘作业。再次,通过拉绳的协调运动,将采摘的水果通过传输管道放到收集装置部分的水果收集盘中,完成一次采摘作业。最后,当收集盘中的水果收集满后,二级升降装置下降到一定位置,人工取下收集盘,再放上一个空的收集盘,将收集盘中的水果放到轮履小车的收集箱中。
2 关键零部件设计
2.1 机械爪
机械爪用于摘取目标果实,采用拉绳驱动方式,具体的结构如图2所示。机械爪包括夹持机构和底座旋转机构,夹持机构安装在底座旋转机构上,采摘手指使用TPU柔性材料,能避免采摘过程中对水果的损伤,拉动两根拉绳可以实现机械爪对目标果实的夹持和旋转动作,当手指夹持住目标果实后,底座旋转机构会驱动夹持机构连同目标果实一起转动,将果实从树枝上拧下,实现对目标果实的摘取。
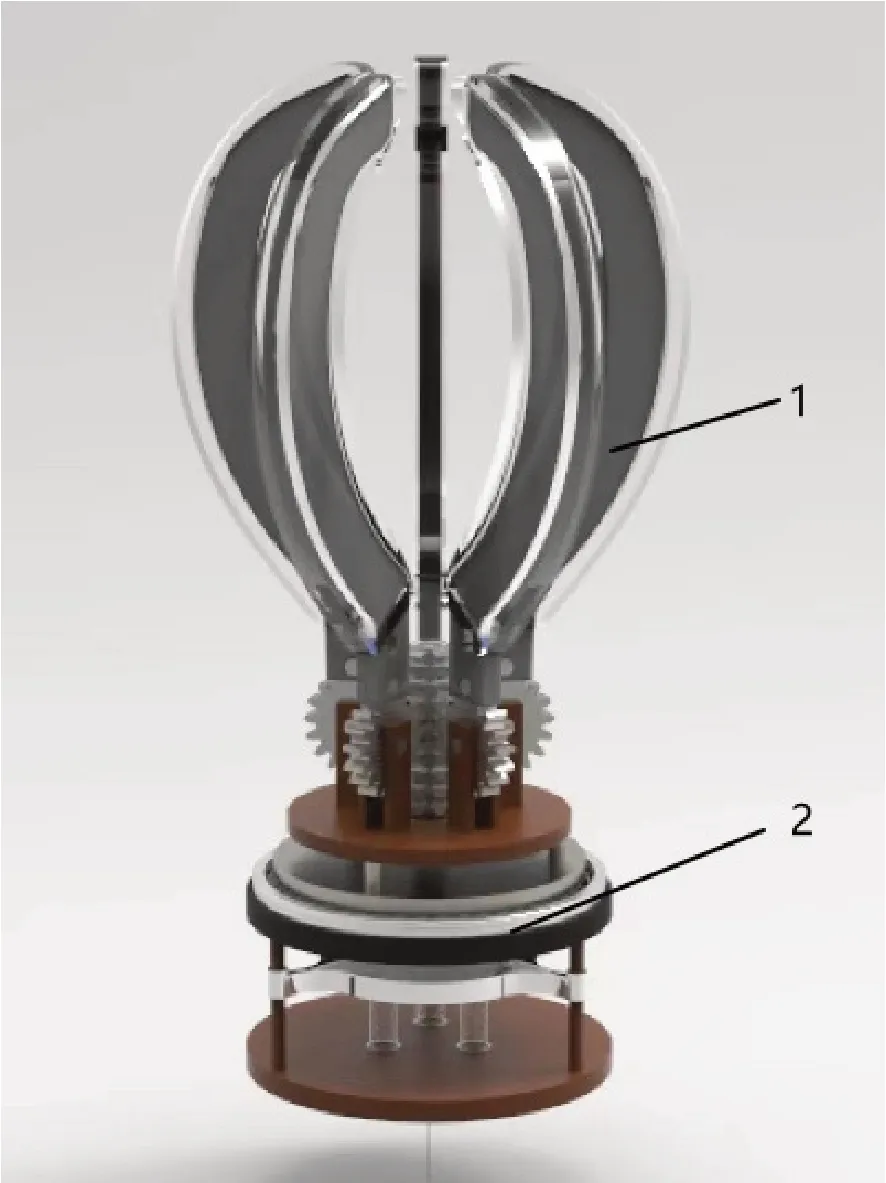
图2 机械爪结构示意图
2.2 机械臂
象鼻是大象最重要的肢干,本身由16块肌肉组成,靠纵向肌肉的牵引来实现运动,可以完成伸长、弯曲和偏转动作,具有快速伸长并朝任意方向弯曲的能力,并且可以根据需要改变自身刚度。在相同的尺度范围内,象鼻既灵活又具有较高的自由度。
机械臂模仿象鼻运动机理进行设计,是一种新型的仿生机械,模仿象鼻内部纵向肌肉的牵引来实现运动,采用拉线方式驱动,机械臂结构示意图如图3所示。其结构具有以下特点:

图3 机械臂结构示意图
1)在长度方向上有很高的拉伸强度,而在其他方向上却很柔软且易于弯曲,可以承担较大的拉力而不改变本体尺寸。
2)自身超强的弯曲变形能力能够适应不同的工作环境,在复杂狭小的工作空间内每个关节可以根据环境产生弯曲变形,具有很强的避障能力和环境适应能力。
3)在运动空间内,能够控制机械臂末端较准确地到达指定位置。
机械臂主要由三段相同的柔性段从上到下依次串接而成。各柔性段均包括上、下底座连接盘和3个中间支撑盘,底座连接盘和支撑盘的圆周上均布有9个对应的绳孔,便于控制机械臂的9根拉绳穿过,一个柔性段由3根拉绳进行控制,3根拉绳间隔120°设置,在保证有效驱动的同时又不至于使控制过于复杂,中间支撑盘的引入能对柔性段的弯曲进行约束,使得变形更加可控。其中,机械爪的拉绳从拉簧硅胶骨架的内部穿过,机械爪和机械臂都是由驱动底座提供动力,驱动底座上设有直线模组,直线模组运动并拉动拉绳,能够实现机械臂弯曲并到达目标采摘位置,同时能实现机械爪对目标果实的摘取。
2.3 车身
车身主要由车型框架、变履转换装置、水果收集箱三大部分组成,其结构示意图如图4所示。车型框架起到连接各分支部分和协调配合的作用,车型框架底部装有变履转换装置,变履转换装置利用液压伸缩杆来伸缩调整五边形框架支撑梁的形状,从而可实现平履动和半轮动两种工作状态的切换,车型框架尾部装有水果收集箱,用于存储收集到的水果。
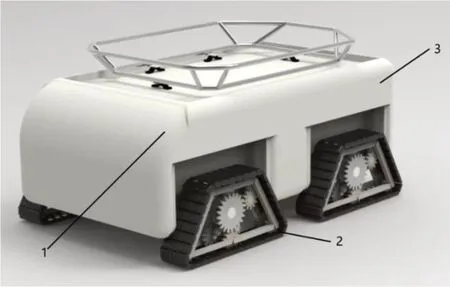
图4 车身结构示意图
2.4 收集装置
收集装置主要由一级升降装置、二级升降装置、传输管道、收集盘组成。一级升降装置作为安装基础,连接设置二级升降装置,传输管道、收集盘安装在二级升降装置上,一级升降装置用于实现对收集装置的升降,采摘完的水果通过传输管道进入收集盘,通过二级升降装置的移动完成水果的向下输送,最终,收集盘中的水果进入水果收集箱。水果收集装置协调柔性采摘机械臂进行工作,能缩短机械臂控制末端的位移距离,进一步提高采摘效率。收集装置结构示意图如图5所示。
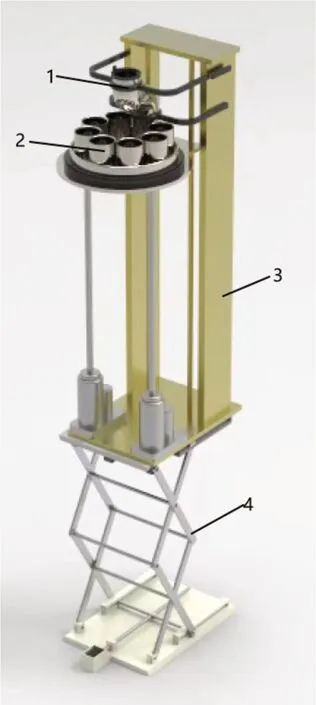
图5 收集装置结构示意图
3 结论
1)根据仿生学原理,模仿大象鼻子运动机理,设计了一种仿象鼻柔性采摘机械臂,可实现较大幅度的柔顺弯曲运动。
2)基于仿象鼻柔性采摘机械臂设计了一种树生水果采摘机器人,该机器人具有工作空间更大、灵活性更强、安全性更高等优点,可以满足枝条密集、作业空间狭窄环境下的采摘作业需求,使得人机协作更加安全。
