单基站(1+1)模式与网络RTK模式适用性分析
2023-05-26徐波陈娜王喜
徐波 陈娜 王喜
(1.千寻位置网络有限公司,上海 200082;2.河南省自然资源综合保障中心,河南 郑州450016;3.河南省地图院,河南 郑州450003)
1 绪论
卫星导航定位基准站作为地理空间框架基础设施,使得在全国提供网络实时动态定位服务技术(简称“网络RTK 技术”)成为现实,同时在基准站覆盖范围内可提供动态分米级、厘米级定位和后处理毫米级服务。实时动态(RTK)定位技术是GNSS 新一代技术,集合了现代通信、计算机存储与处理、信息网络分发及大地测量技术等[1]。近年来,随着国内北斗地基增强一张网的上线及服务,高精度定位服务的应用场景愈加广泛。目前,智能驾驶、无人机巡检、共享单车等新兴行业,通常利用网络RTK 模式获取高精度定位服务,以满足跨区域、高并发和高精度的定位需求。但随着新电离层活跃周期的到来,未来3 年会逐渐增强,预计2025 年迎来下一个极年。电离层是影响高精度定位的重要因素,尤其在我国南方地区,每年3 月、4 月和9 ~11 月是电离层最活跃时期,由于国内主要厂家在中低纬度区域布设CORS基站的间距多为50km左右,在电离层活跃期用户很难实时获得有效固定解[2,3]。
本文主要验证电离层相对平稳期和活跃期两种定位模式的定位效果,在我国南方省份等距离选取若干已知控制点,对单基站模式和国内某厂家的RTK 厘米级定位服务进行对比测试,通过分析测点与基准站距离和定位精度的关系,得出单基站模式和网络RTK 模式在电离层活跃期的适用场景和定位精度。
2 定位原理和定位精度分析
2.1 单基站(1+1)定位原理
单基站模式是以一个已知坐标(或假设已知)的测站为基准站,基于载波相位观测值的一种实时动态差分定位技术。流动站用户在基准站周围作业,两站间距一般不超过15km,基准站和流动站的共视卫星相同,因而具有相近的电离层延迟、对流层延迟和卫星轨道等误差影响。通过对二者观测数据进行差分处理,可大大削弱卫星端、传播路径相关的误差,获得较高精度的双差观测数据,达到厘米级精度的定位结果[4]。
2.2 网络RTK 定位原理
网络RTK 又称多基准站RTK,是在一定区域建立多个(一般为3 个以上)卫星导航定位基准站,连接成三角网覆盖该区域,同时作为基准实时计算和播发改正信息,进而提高该区域流动站的定位精度。按照差分原理分类,目前广泛应用的商用网络RTK 系统主要有三种:双差的虚拟参考站(VRS)技术、单差的主辅站(MAC)技术和非差的区域改正数(FKP)技术。
网络RTK 技术主要削弱流动站定位残差项的影响。常规RTK 技术一般要求流动站与基准站间距小于15km,当二者间距增大时,站星间作差后的空间相关误差(对流层延迟误差、电离层延迟误差等)无法有效削弱,影响模糊度固定,导致定位结果精度变差。网络RTK 基于多个基准站的差分定位,通过双差处理技术可削弱空间相关误差影响,提高流动站的定位精度。
2.3 定位精度分析原理
定位精度的可靠性通常采用内符合精度和外符合精度两个指标来体现。内符合精度主要反映数据粗差率和数据稳定性等情况,外符合精度描述测量值与真值之间的差值情况,反映系统的准确性。本文重点分析单基站模式和网络RTK 模式的定位精度情况[5]。
(1)内符合精度计算原理
首先计算一个测点平面和高程测量值的平均值并分别减去测量值,对所有差值不同区间的概率进行统计。同时根据公式(1)至公式(5)分别计算坐标分量内符合精度(MX、MY、MH)和点位内符合精度(MS):
公式中:MX、MY、MH分别为坐标分量内符合精度 ;MS为点位内符合精度;dX、dY、dH为观测值坐标分量平均值与观测值分量的差值;dS为测试点点位平均值和测量值的差值;N为测试点个数;K为测试点的观测次数。
(2)外符合精度计算原理
公式中,MP为测试点的平面点位外符合精度;dP为测试点的已知平面坐标与观测的平均值之间的差值 ;N为测试点个数。
3 电离层分析
影响GNSS 定位精度的因素通常有卫星端、传播路径和定位终端相关的三大因素。与卫星端相关的误差主要有卫星钟差、卫星轨道误差等;与传播路径相关的主要包括电离层延迟、对流层延迟和多路径误差等;还有与终端接收器相关的误差。其中,影响最严重、最难以把握的就是电离层[6]。
当卫星信号穿越电离层时,电离层中的自由电子会对GNSS 信号产生非线性散射干扰,导致传播速度发生变化,形成调制信号包络的传播时延,时延量的值与传播路径上的总电子含量(TEC,Total Electron Content)成正比,与载波频率平方成反比。一般采用VTEC 和ROTI 两个指标反映电离层的活跃程度。
VTEC 特指观测站与GNSS 卫星的倾斜连线映射到穿刺点球壳高度上的垂直TEC,由于具有较好的分散覆盖特征,更适合用来衡量某个区域的电离层TEC 空间变化特征,一般用来描述午后电离层活跃。
ROTI(Rate of TEC Index)作为TEC 在时间维度上的变化参数,反映的是TEC 在邻近时间内(一般为1 ~5 分钟)变化程度的统计指标,一般用来描述夜间电离层闪烁。电离层越活跃对应的ROTI 值则越大,电离层活跃周期性变化曲线如图1 所示。

图1 电离层活跃周期
4 定位精度分析
每年春分(3 月、4 月)和秋分(9 ~11 月)是电离层活跃期,因此选取两次的测试时间分别为2022年6 月和2022 年11 月。在南方某市,以某基准站为中心在半径为5 ~30km 范围内等距离选取6 个已知控制点,分别采用单基站模式和接入国内某厂家的网络RTK 服务,在每个已知控制点上分别采用两种定位模式单独进行4 个测回。为保证观测精度和可靠性,在每个控制点上采用两种定位模式分别进行4 次初始化连接,采样间隔设置为1 秒。RTK 设备的固定解内符合精度分别设置为平面2cm、高程3cm,需同时满足才能得到固定解。当获取固定解后开始记录测量数据,连续记录30 个固定解作为一组测试数据,然后断开网络重新初始化记录第二组数据,以此类推,获取四组数据后再切换成第二种定位模式进行测量。
(1)在6 月份某天Roti 值为0.105 时,电离层平稳期间对6个已知控制点分别采用两种模式进行测量,对单基站定位模式下四组测量值取平均值后与真值之间作差,对三个方向的差值进行统计分析,如表1 所示。

表1 电离层平稳期两种定位模式的精度对比
通过图2 可知,在电离层平稳阶段,当测站与主站间距小于15km 时,两种模式的定位精度相当,X 和Y 方向误差在3cm,H 方向误差在5cm 范围内。因为在短距离情况下测站与主站可同时观测相同的卫星,误差具有相关性,二者进行作差处理,可较好地消除电离层延迟误差。随着测站与主站距离增大,单基站模式的稳定性不足逐渐显现,特别是高程方向,在20km外误差增加较快。
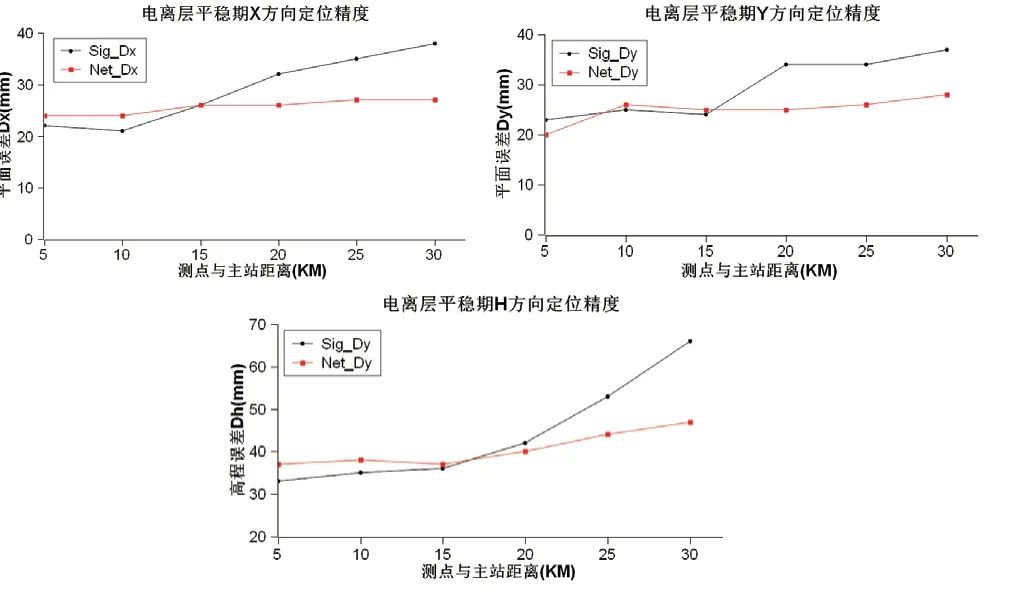
图2 电离层平稳期两种模式的定位精度对比
(2)在11 月份某天Roti 值为2.905 时,电离层活跃期分别采用两种模式测量6 个已知控制点,对网络RTK定位模式下四组测量值取平均值后与真值作差,对三个方向上的差值进行统计分析,如表2 所示。

表2 电离层活跃期两种定位模式的精度对比
通过图3 可知,在电离层活跃期间,单基站模式整体定位精度比网络RTK 模式高。总体上,当测站与主站间距在20km 以内时,两种模式都能得到固定解,但单基站的定位精度比网络RTK 模式稍高;当测站与主站间距超过20km 时,网络RTK 无法获得固定解,单基站模式仍可获得固定解,但通过曲线图可以看出,定位精度也变得比较差;当测站与主站间距超过25km时,目前的算法无法准确对电离层进行建模,无法消除电离层延迟误差,导致两种模式都无法获得固定解。

图3 电离层活跃期两种模式的定位精度对比
5 结论
在同一地点的电离层平稳期和活跃期分别用单基站模式和网络RTK 模式进行测试对比,得到以下结论:
(1)在电离层平稳期间,测站与基准站间距15km内,采用单基站模式的定位精度比网络RTK 定位精度稍高。在测站与基准站间距30km 以内,随着二者间距的增加,单基站的定位精度逐步变低,而网络RTK 模式可以稳定提供相对精确的定位精度。
(2)在电离层活跃期间,测站与基准站间距30km范围内,单基站的定位精度都明显好于网络RTK 模式;测站与基准站间距超过20km 时,网络RTK 模式较难获得固定解;在测站与基准站间距25km 以内,单基站模式仍能获得固定解,但随着间距的增大,初始化时间和定位精度都有所下降;当测站与基准站间距超过30km 时,两种定位模式都无法获得固定解。
(3)现在国内部分厂家已经提供电离层活跃程度的查询功能,各行业在进行高精度定位作业时,可以选择性地避开电离层活跃期,从而提升工作效率。