考虑驾驶员差异性的安全距离模型优化
2023-05-24李胜琴
李胜琴, 杜 鹏
(东北林业大学 交通学院, 黑龙江 哈尔滨 150040)
无人驾驶智能车辆集环境感知、决策规划、多等级辅助驾驶等功能于一体,集成应用计算机、现代传感、人工智能等技术,是车辆技术发展的趋势,主动避障技术是智能车辆研究中重要的一项技术.主动避障系统也称为预碰撞系统,是一种旨在避免或者降低碰撞危险程度的主动安全系统,具有一定的规避风险能力.在车辆行驶过程中,通过雷达、摄像头等传感器获取前方交通道路信息,结合本车动态参数及驾驶员操作行为,实时计算碰撞危险程度,提前发出信号警示驾驶员甚至在必要时主动介入操作.
相关研究[1]表明,由于驾驶员自身操作不当造成的交通事故占交通事故总数的57%~65%.主动避障系统可以降低由于人为操作不当造成事故的概率,但是过于激进的避障系统会降低行驶的安全性,同时影响车内乘员的乘坐舒适性;而过于保守的避障系统又会影响驾驶员的注意力,同时浪费交通资源造成交通拥堵.因此,合理的避障系统应将实时采集的车辆状态参数与行车环境信息整合,计算并进行比较判断,快速做出相应决策,在保证行驶安全性和乘坐舒适性的同时,尽可能最大化利用交通资源.主动避障系统中,安全距离模型作为判断碰撞危险程度的重要依据,直接影响避障系统的准确性与实时性.
现有安全距离模型主要有2种:① 基于车辆制动动力学的安全距离模型,如Mazda模型、Honda模型;② 基于碰撞时间的安全距离模型,即TTC(time to collision)模型.朱冰等[2]提出了一种基于路面附着系数估计的自适应汽车纵向碰撞预警策略,能够在不同工况下有效提高预警准确性和道路空间利用率.胡仕雨[3]针对商用AEB(autonomous emergency braking)系统在制动时不精准的问题,提出面向AEB系统的商用车气压制动系统制动控制策略,改进商用车AEB系统的TTC模型控制策略,提高了系统制动精确性,从而提高了系统的安全性.郑刚等[4]通过拟合不同驾驶员的反应时间与行驶速度的关系曲线,修正TTC报警阈值,可以提高预警系统的准确性.尹小庆等[5]提出一种考虑路面附着因数和车辆行驶状态的TTC预警方法并建立了对应的CPWT(collision pre-warning time)模型,提高预警的准确性.顾凯峰[6]考虑路面附着系数的变化对碰撞预警时机的影响,采用BP(back propagation)神经网络实时识别路面类型,提出一种能够根据不同路面类型自适应调整安全车距的纵向碰撞预警策略,仿真验证该算法能提高预警系统的准确性和实时性.胡守俍[7]将传统安全距离模型与车头时距安全距离模型二者有机结合并制定了速度阈值,仿真结果表明,制定的控制算法能够有效实现制动,避免车辆碰撞的发生,并且有效减轻碰撞强度.YUAN C.C.等[8]针对传统模型忽略了传感器无法及时检测到障碍物的遮挡区域问题,提出一种基于卷积神经网络实时识别潜在交通事故区域的创新安全距离模型,提高了智能车的避障性能.
现有安全距离模型大多将驾驶员反应时间设为定值,忽略了驾驶员的差异,未考虑到不同驾驶员具有不同的反应时间.针对这一问题,笔者提出一种考虑驾驶员差异性的安全距离模型,引入驾驶员反应时间计算模块,进一步提高避障系统的准确性.
1 Honda安全距离模型分析
Honda公司提出的安全距离模型采用临界报警距离和极限报警距离的2级报警机制,系统介入时间较晚,对驾驶员影响较小,可以提高驾驶员的驾驶舒适性.该模型的临界报警距离为
dw=2.2vr+6.2,
(1)
式中:vr为两车相对车速.
极限报警距离为
(2)
式中:t1为系统延迟时间;t2为制动时间,包括驾驶员反应时间t0和制动系统制动时间t3,即t2=t0+t3,t1、t3的值由制动系统性能决定,一般t1和t3取值均为0.2 s;v1、v2分别为本车和前车的车速;a1、a2分别为本车和前车的制动加速度.
以往对安全距离模型的研究侧重点在于自车与前车的车辆状态参数,为计算方便通常将驾驶员的反应时间设为定值,忽略驾驶员的差异性.
2 安全距离模型改进
驾驶员反应时间、行车环境、车速等多种因素相互耦合,共同影响着车辆安全距离.驾驶员的反应时间因人而异,在建立安全距离模型时要考虑驾驶员的差异性,由于影响驾驶员反应时间的因素众多,需要对不同影响因素进行分析,综合考虑建立驾驶员反应时间模型.
2.1 驾驶员反应时间
在汽车碰撞事故中,驾驶员的反应时间很大程度上影响事故发生的严重程度.王磊等[9]以国内高速公路227起交通事故为基础,定量分析高速公路交通事故的主要影响因素,研究显示驾驶员的驾龄、年龄、能见度和路面条件等与交通事故严重程度显著相关.由此可知,驾驶员的反应时间受驾驶员自身情况、车速和环境的耦合影响.以下对驾驶员反应时间进行建模,分别从驾驶员自身情况和车速2部分进行分析,采取模糊控制的方法对驾驶员反应时间进行求解.
2.1.1驾驶员的自身情况
不同的驾驶员在某种特定场合下做出正确决策所用的时间不尽相同,这是由驾驶员的驾驶经验、反应能力等因素综合决定的,通常来说主要受驾龄和驾驶风格这2个因素的影响,因此,在建立驾驶员反应时间模型时选取这2个因素作为特征值.
1)驾龄长的司机比新手司机有更为丰富的驾驶经验,能在同样情况下更快地做出正确决策.我国2020年《机动车驾驶证申领和使用规定》规定考取驾驶证的年龄为18~70周岁,因此将驾龄划分为短、中、长3个模糊集合,分别记为J1、J2、J3,论域范围为[0,52]a,隶属度函数选择高斯函数.
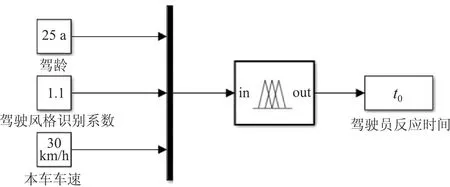
2)不同驾驶员由于驾驶习惯、心理素质等因素影响,通常表现出不同的驾驶风格.吕凯光等[10]通过驾驶员差异性所呈现的人群聚类规律进行研究,引入驾驶风格识别系数k描述驾驶风格,研究所得数据集中在0.4~1.5,分别将0.4≤k≤0.8、0.8 2.1.2车 速 车速的高低也会造成驾驶员反应时间的差异,不同车速行驶时,驾驶员的精神紧张程度不同,反应力也不同.将车速划分为低速、中速、高速3个模糊集合,分别记为C1、C2、C3,论域范围为[0,120]km/h,隶属度函数选择三角函数. 驾驶员反应时间一般为0.3~2.0 s,将驾驶员反应时间分为慢、中、快3个模糊集合,论域范围为[0.3,2.0]s,分别记为F1、F2、F3,隶属度函数选择高斯函数. 建立驾驶员反应时间计算模块,输入为驾驶员驾龄Q、驾驶风格识别系数k、车速v,输出为驾驶员反应时间t0,隶属度函数如图1所示,其中:f(·)为隶属度函数. 图1 隶属度函数 驾龄、驾驶风格识别系数、车速这3个特征值相互独立,故模糊规则选择If()and()and()Then的形式,总计27种组合形式.系统获取驾龄、驾驶风格识别系数、车速信息后,首先对三者进行模糊化处理,按照隶属度函数和模糊规则进行模糊运算,得出驾驶员反应时间的模糊结果,然后采用重心法对模糊结果进行反模糊化处理,最后得出驾驶员反应时间的具体结果.驾龄、驾驶风格识别系数、车速三者与驾驶员反应时间关系的模糊推理结果如图2所示.从图2a可以看出:当驾龄维持在较低水平时,随着驾驶风格识别系数的增加,驾驶员反应时间先增大后减小;当驾驶风格识别系数一定时,随着驾龄的增加,驾驶员反应时间先降低再增加.从图2b可以看出:当车速维持在中等水平时,随着驾龄的增加,驾驶员反应时间先降低后增加;当驾龄处于较高水平时,随着车速的增加,驾驶员的反应时间逐渐增加.从图2c可以看出:当车速一定时,随着驾驶风格识别系数的增加,驾驶员反应时间先增大后降低;当驾驶风格识别系数一定时,随着车速的增加,驾驶员反应时间逐渐增加. 图2 模糊推理结果 最大制动加速度abmax受到制动系统的性能、轮胎-路面附着系数和实际驾驶情况的影响.一般在进行最大制动加速度计算时,忽略制动系统的影响,考虑轮胎-路面附着系数的计算公式为 abmax=φg, (3) 式中:φ为路面附着系数,由于主要研究驾驶员差异特性,假设汽车行驶在干燥的沥青路面上,取值为0.7;g为重力加速度,取值为9.8 m/s2.由式(3)计算可得abmax=6.86 m/s2. 为验证提出的安全距离模型的正确性,利用Matlab/Simulink软件建立模型,进行仿真试验.利用模糊控制算法建立的驾驶员反应时间计算模块如图3所示. 图3 驾驶员反应时间计算模块 针对驾龄、驾驶风格识别系数和车辆初始车速的不同,进行仿真试验,可以得到不同驾驶员在不同初始车速时的反应时间.选取比较有代表性的几组驾驶员及车辆初始速度,数据如下:① 驾龄为2 a,驾驶风格识别系数为0.5,车辆初始速度为20 km/h;② 驾龄为25 a,驾驶风格识别系数为0.9,车辆初始速度为10 km/h;③ 驾龄为35 a,驾驶风格识别系数为1.3,车辆初始速度为30 km/h;④ 驾龄为30 a,驾驶风格识别系数为0.6,车辆初始速度为120 km/h;⑤ 驾龄为17 a,驾驶风格识别系数为1.5,车辆初始速度为60 km/h;⑥ 驾龄为5 a,驾驶风格识别系数为1.4,车辆初始速度为70 km/h;⑦ 驾龄为50 a,驾驶风格识别系数为1.2,车辆初始速度为30 km/h.通过这几组数据计算得到驾驶员反应时间分别为1.324、0.975、0.993、1.150、1.013、1.315、1.001 s,与传统安全距离模型中所设定的固定反应时间1.200 s相差较大,代入式(2)计算得到的车辆安全距离也有差别,可最大程度利用车辆的安全行驶距离,避免主动避障系统提前或滞后介入驾驶员的操作. 在车辆行驶过程中,主动避障系统通过毫米波雷达、激光雷达、单目/双目摄像头等传感器来探测前方目标信息[11],实时获取前车速度、加速度、两车间距等信息,当两车实时车距大于临界报警距离时,无碰撞危险,不采取措施;当两车实时车距介于临界制动距离与极限预警距离时,可能存在碰撞危险,预警指示灯、指示信号提醒驾驶员危险;当实时车距小于极限报警距离时,系统强制介入并立即进行制动.依据中国新车评价规程(China-new car assessment program,C-NCAP),选取前车制动工况进行仿真试验.建立的碰撞过程仿真模型如图4所示,其中u1为系统默认的输入变量.首先通过驾驶员反应时间计算模块,利用模糊控制算法计算驾驶员反应时间;然后依据自车初始车速和驾驶员反应时间,按照式(2)计算临界及极限报警距离. 图4 前车制动仿真模型 3.2.1前车快速制动 假设路面附着系数为0.7的干路面场景,前车初始速度为40 km/h,快速制动,制动加速度按式(3)计算,结果为6.86 m/s2,本车以60 km/h的初速度行驶,此时按式(1)计算车辆临界安全距离,结果为18.422 m.分别选取驾龄高且驾驶风格激进(驾龄为30 a,驾驶风格识别系数为1.4)和驾龄低且驾驶风格谨慎(驾龄为3 a,驾驶风格识别系数为0.5)2种驾驶员进行分析.计算得到的驾驶员反应时间分别为0.978、1.324 s,极限安全距离分别为7.475、9.871 m,与固定反应时间1.200 s所计算的安全距离9.012 m相比,结果表明:主动防撞系统可以根据驾驶员的差异性设定极限安全距离,选择不同的介入时机,可以最大程度发挥驾驶员的主动性,保证行车安全的同时减少对驾驶员行为的干涉. 3.2.2前车慢速制动 假设路面附着系数为0.7的干路面场景,前车初始速度为30 km/h,慢速制动,制动加速度取为快速制动的1/2,取值为3.43 m/s2,本车以60 km/h的初速度行驶,此时按式(1)计算得到的车辆临界安全距离为24.533 m.分别选取驾龄高且驾驶风格激进(驾龄为30 a,驾驶风格识别系数为1.4)和驾龄低且驾驶风格谨慎(驾龄为3 a,驾驶风格识别系数为0.5)2种驾驶员进行分析.计算得到的驾驶员反应时间分别为0.978、1.324 s,极限安全距离分别为10.747、14.104 m,与固定反应时间1.200 s所计算的安全距离12.900 m相比,主动避障系统依据驾驶员差异性分别设置不同的极限安全距离,可以满足驾驶员个性需求,保证行车安全的同时,减少对驾驶员行为的干涉. 通过对驾驶员差异性分析,选择驾驶员的驾龄、驾驶风格识别系数、车速3个因素作为特征值,采用模糊控制算法,进行驾驶员反应时间的计算.基于制动过程分析,建立考虑驾驶员差异性的安全距离模型,改进了传统模型中将驾驶员反应时间设为固定值的缺陷,优化了安全距离模型.并依据C-NCAP规定,选取前车制动工况分别进行前车快速制动和慢速制动仿真试验,结果表明:考虑了驾驶员差异性所计算得到的驾驶员反应时间和极限安全距离,更符合不同风格驾驶员的操作习惯,既可以提高车辆行驶安全性,又可以提高道路通行能力,减少对驾驶员操作行为的干涉.

2.2 最大制动加速度
3 仿真分析
3.1 驾驶员反应时间
3.2 安全距离

4 结 论