空间飞行器自主诊断重构的理论和方法
2023-05-19王大轶屠园园张香燕符方舟
王大轶,屠园园,张香燕,符方舟
(1. 北京空间飞行器总体设计部,北京 100094;2. 中山大学航空航天学院,深圳 518000)
0 引 言
空间飞行器是指按照天体力学规律在地球大气层以外的宇宙空间运行,执行探索、开发、利用太空及天体等特定任务的各类飞行器,一般分为载人和无人两类,后者主要指人造地球卫星和深空探测器(见图1)。人造地球卫星按运行高度可以分为低轨道卫星(轨道高度小于2 000 km)、中轨道卫星(轨道高度2 000 km~20 000 km)和高轨道卫星(轨道高度20 000 km~36 000 km),由于在地球附近做环绕飞行,这类飞行器主要依靠地面站进行运控管理。深空探测器是指对月球和月球以远的行星与行星际进行探测的无人空间飞行器(轨道高度大于384 000 km),其探测目标距离远、天地通信时延大、飞行环境不确定、关键任务时间紧,难以依靠地面站进行实时的运控管理,对自主运行提出了迫切需求[1]。
图1 人造地球卫星和深空探测器Fig.1 Satellite and deep space probe
空间飞行器自主运行的关键技术主要包括:自主诊断重构、自主导航、自主任务规划和自主制导控制。其中,自主诊断重构是指仅靠空间飞行器自身携带的资源配置,自主实现故障检测与隔离,并通过改变部件构型、控制算法等方式处理故障,以恢复系统全部或部分既定功能的技术手段。空间飞行器系统规模日益庞大、功能任务愈发复杂、太空环境变化多样,在轨难免发生各类故障,如果其中一些故障无法及时自主处理,将会对系统的安全运行造成严重危害。现有空间飞行器故障诊断与重构的自主性水平不高,主要依赖地面专家根据遥测遥控数据进行故障会诊,再基于会诊结果向空间飞行器发送重构指令。这种基于“天地大回路”的故障诊断与重构方式适用于大部分人造地球卫星,但对于通信时延大的深空探测器而言,时效性较差,难以实现故障的及时处理,无法保障系统安全可靠自主运行。因此,实现自主诊断重构是空间飞行器安全可靠自主运行的保障[2],是另外3项自主运行关键技术顺利实施的首要前提。
诊断重构能力的量化评估是实现空间飞行器自主诊断重构的关键。空间飞行器通常具有不易在轨维修和资源严重受限两大特点,其诊断重构能力确定于设计之初且受制于有限资源,这意味着空间飞行器自主诊断重构研究需要关注系统前期设计,充分利用有限资源。然而,一方面,传统研究主要关注诊断重构算法的创新突破,存在局限性:1)未关注系统前期设计,无法从根本上提高空间飞行器的诊断重构能力;2)未考虑空间飞行器资源约束与诊断重构算法精准性、实时性之间的矛盾,设计的算法通常比较复杂,对计算和存储资源提出了极高要求,仅能在地面运行,无法在器上自主实现。另一方面,传统的空间飞行器设计多依赖工程经验对系统进行打补丁式的冗余添加,未进行诊断重构能力量化评估,缺乏理论指导,难以对系统进行有针对性的优化设计。可诊断性与可重构性作为表征系统诊断重构能力的基本属性[3-4],为实现空间飞行器自主诊断重构提供了新的思路与理论支撑:基于可诊断性与可重构性理论,量化评估系统诊断重构能力,可为设计与运行两阶段诊断重构能力的提升提供定量指导依据,具有重要的研究意义。
鉴于此,本文以基于能力量化评估的空间飞行器自主诊断重构方法为对象,首先分析了国内外研究现状并梳理了后续的待突破难点,然后针对这些难点提出了创新研究思路,最后进行了总结。
1 国内外研究现状
基于能力量化评估实现空间飞行器自主诊断重构需要重点研究诊断重构能力表征、判定和量化方法、资源配置与诊断重构方案综合优化方法、诊断重构方案在轨调整方法,下面介绍这三方面的国内外研究现状。
1.1 诊断重构能力表征、判定和量化方法
1)诊断重构能力表征方法
诊断重构能力表征指对系统模型及其已认知的故障空间、资源配置包络边界等要素进行科学数学表达的过程。其中,空间飞行器系统模型的准确建立是研究的前提与基础。根据建模过程对系统知识和过程数据的需求关系,可以将系统模型分为机理模型和数据驱动模型,下面分别调研这两类模型的构建方法。
在机理模型构建方面,国内外研究多在一定的假设下,基于常微分、偏微分方程等工具,根据对象的内部机制或者物质流传递机理建立数学模型。Marshall等[5]考虑几何非线性变形和大刚体运动等问题,基于本征正交分解法、节能采样加权法和浮动参考系,提出了一种超轻柔性空间飞行器的降阶模型构建方法。Hearn[6]基于流体力学和热力学原理,建立了空间飞行器推进系统模型,基于该模型实现了推进系统的研制与验证。Dai等[7]利用多信号流图建立了空间飞行器电源系统模型,实现了电源系统的测试性分析。袁昭旭[8]从子结构模态综合和模型修正两个方面实现了基于有限元的复杂空间飞行器结构建模。田静[9]通过采用自顶向下的方法对卫星姿态控制系统进行失效工作机理分析,建立了基于动态故障树的卫星姿态控制系统失效机理模型。Xu等[10]将扩展卡尔曼滤波应用于模型参数和状态的评估中,构建了电池剩余使用寿命预测的状态空间模型。机理模型可解释性好、针对性强,但对大型复杂系统,构建难度巨大,且机理知识仍处于部分掌握的状态,模型中会引入大量的假设和经验,严重降低了建模精度。
在数据驱动模型构建方面,国内外研究多利用人工神经网络、遗传算法、支持向量机等机器学习算法,深度挖掘大量工程数据,建立系统模型。Goebel等[11]提出基于相关向量机-粒子滤波的高功率锂电池退化模型构建方法,精度比传统回归分析方法和Gaussian过程方法提高30%以上。Kamruzzaman等[12]提出了一种基于神经网络的电源系统建模方法,利用实验生成的电源系统历史数据训练具有校正线性单位激活函数的神经网络。叶正宇等[13]提出了一种基于神经网络的空间飞行器姿控系统建模方法,利用无故障敏感器信号对神经网络模型进行训练,实现对姿控系统未知动态特性的建模。张鹏飞等[14]为研究反作用轮微振动对空间飞行器产生的影响,利用模拟退火遗传算法建立了反作用轮扰动模型,并设计刚性六分量力测试平台对反作用轮扰动进行测试,利用实测数据对扰动模型进行了验证。数据驱动模型具有实时性强、可动态更新等优势,但某些复杂系统的强非线性、时滞性以及高维度等特性都对建模过程和模型性能带来不利影响,且数据驱动模型较低的可解释性也是其不可忽视的主要缺点。
2)诊断重构能力判定方法
在诊断能力判定方面,国内外相关研究多基于系统机理模型建立故障信息与测量信息的映射关系,通过分析映射关系的连通性构建可诊断性判据,对系统诊断能力的有无进行判定。Persis等[15]基于图论对故障诊断滤波器进行研究,通过求解基于残差生成的非线性基本问题,给出残差生成器的存在条件。Kocielny等[16]给出了基于二值诊断矩阵的故障可隔离性评价方法,并将该评价方法用于诊断算法残差的设计过程。Ji等[17]针对传感器早期故障,给出了基于滑动窗口贡献的故障诊断算法,以及基于该算法的故障可检测性与可隔离性理论分析方法,并给出了窗口长度对故障可诊断性的影响。Liu等[18]针对空间飞行器故障多发的特点,通过结合符号有向图与故障动态信息,提出了基于特征矩阵的残差多值评价方法,实现了典型故障不同特征、时间序列的准确描述和诊断能力有无的定性评估。Baldi等[19]提出了基于图论的可检测性与可隔离性判定方法,从系统结构的角度明确了空间飞行器控制系统各个部件故障的可检测、可隔离条件。
在重构能力判定方面,国内外研究多基于系统结构分析或借助图论等工具,通过分析部组件与目标功能之间的连通性,判断系统重构能力的有无。Staroswiecki等[20]通过定义系统的服务、版本、操作模式等概念,构建一种自下而上的金字塔式功能逻辑树,当系统发生故障时,可根据目标“服务”可行“版本”的有无来判定其可重构性。Gehin等[21]基于功能分析,建立了一种灵活模型,系统在线故障以后,可通过自主更新模型来实现可重构性的在线判定。Wang等[22]针对空间飞行器控制系统提出了一种基于功能目标模型的可重构性判定方法,利用最小割集分析给定故障模式下的系统是否可重构,并基于最小路集分析了系统薄弱环节。Loureiro等[23]针对智能自动车的执行器、传感器以及设备故障,提出了一种基于键图模型的可重构性判定方法,通过利用键图工具的行为、结构及因果特性,验证了系统可重构的条件。Abdesselam等[24]提出了一种基于超图的可重构性评价方法,将每一个系统方程表示成一个超边,通过故障条件下相应超边之间的路径有无判定系统的可重构性。
3)诊断重构能力量化方法
在诊断能力量化方面,国内外研究多利用测量信息统计特征等量化故障信息与测量信息之间映射关系的差异性,以此构建可诊断性量化指标,对系统诊断能力的大小进行分析。刘文静等[25]针对空间飞行器动量轮故障,基于动量轮闭环系统模型、故障与征兆之间的关联矩阵,提出了一种定量与定性相结合的可诊断性评价方法。Eriksson等[26]通过对一段时间内的解析冗余方程进行整理,将系统状态空间模型重构为滑动窗口模型,使故障可诊断性量化问题转换成多元分布相似度对比问题,并利用Kullback-Leibler(KL)散度量化不同故障所对应的多元分布相似度,给出了可诊断性量化评价算法。李文博等[27]针对受干扰影响的空间飞行器姿态控制系统,将可诊断性的量化评估问题转化为概率统计中不同多元分布之间差异度大小的度量问题,设计了一种基于Bhattacharyya距离的空间飞行器控制系统可诊断性量化评价指标。Zhong等[28]基于最小误差极小极大概率机,构建了空间飞行器姿态控制系统的可诊断性量化评价指标。Wang等[29]在空间飞行器可诊断性分析过程中较为全面地考虑了多种实际因素的影响,构建了其控制系统可诊断性量化指标体系,实现了系统诊断能力综合评估。
在重构能力量化方面,国内外研究多通过对系统在故障下的能控性、能观性、稳定性、鲁棒性等不同基本性质进行分析,度量系统重构能力的大小。Staroswiecki[30]从能控性的角度研究了线性定常系统的重构能力量化评价问题,充分利用能控性Gramian矩阵从能量角度反映系统控制能力的优势,分别对三种不同的重构目标提出了系统重构能力的量化评价指标。Wu等[31]同时考虑执行器和敏感器故障,综合能控性和能观性Gramian矩阵求解系统的最小二阶模态,以此作为系统冗余水平的度量指标,对不包含虚轴极点的线性定常系统进行了重构能力量化评价。Richter等[32]从系统稳定性的角度研究了分段仿射系统的可重构性问题,基于线性矩阵不等式实现了系统重构能力的量化评价。Tu等[33]从鲁棒性的角度研究了干扰抑制系统的重构能力量化评价问题,利用H2范数度量了系统的重构能力大小,以此为指导优化了系统执行机构的安装构型。
综上,目前国内外对诊断重构能力表征、判定和量化方法的研究虽取得一定进展,但大部分工作均基于机理模型对单一分系统(特别是机理模型清晰的控制系统)展开研究,无法用于规模庞大、难以建立精确机理模型的复杂空间飞行器。因此,后续可将已有机理知识和实际工程数据进行有机结合,研究适用于复杂空间飞行器的诊断重构能力表征、判定和量化方法。
1.2 资源配置与诊断重构方案综合优化方法
在系统资源配置优化方面,国内外研究多对正常模式与故障模式进行独立设计,即先对正常系统进行设计,再向设计好的系统注入诊断重构方案,前者聚焦系统标称性能的提升,后者注重诊断重构能力的保障。Longman等[34]定义了空间飞行器在正常模式下能控度的各种概念,以此作为控制系统设计的指导依据,解决了大型挠性空间飞行器的执行器优化配置问题。Hassan等[35]针对空间飞行器的故障模式,提出了一种基于蒙特卡洛抽样的可靠性优化设计方法,实现了系统冗余的优化分配。Veillette等[36]在设计控制系统时,考虑了执行器故障情况,提出了可靠控制方法,该方法可保证系统在某个给定故障集中保持一定性能水平,但其基于最坏故障情况的设计具有过保守问题。Staroswiecki等和Tu等分别针对线性控制系统[37]、干扰抑制系统[33]和非线性不确定控制系统[38],降低了可靠控制的过保守性,在保证具备充分可重构性的前提下,提升了正常模式下的控制性能。
在系统诊断重构方案优化方面,国内外研究多侧重于诊断与重构之间的信息传递,即重点关注故障系统的状态观测器设计,以状态估计值作为故障诊断与系统重构之间的关键传递信息,对故障诊断与系统重构进行综合设计(见图2)。Jiang等[39]提出了离散T-S模糊系统的鲁棒故障诊断与容错控制综合设计方法,采用降阶故障估计观测器诊断执行器故障,根据故障估计信息,基于模糊动态输出反馈设计了容错控制器。Lan等[40]提出了一种自适应滑模增广状态未知输入观测器,用于估计系统状态、执行器故障和扰动,设计了一种自适应容错控制器,以补偿故障和扰动影响,保证了系统安全性。Liu等[41]提出了一种故障估计与容错控制的集成设计方法,实现了分布式故障估计和容错控制,并给出了增广闭环子系统的集成设计条件。上述成果较少关注诊断重构时间的优化。Zhang等[42]和屠园园等[43]指出,为了实现系统总体性能最优,应该关注故障诊断时间与系统重构时机之间的关联影响。
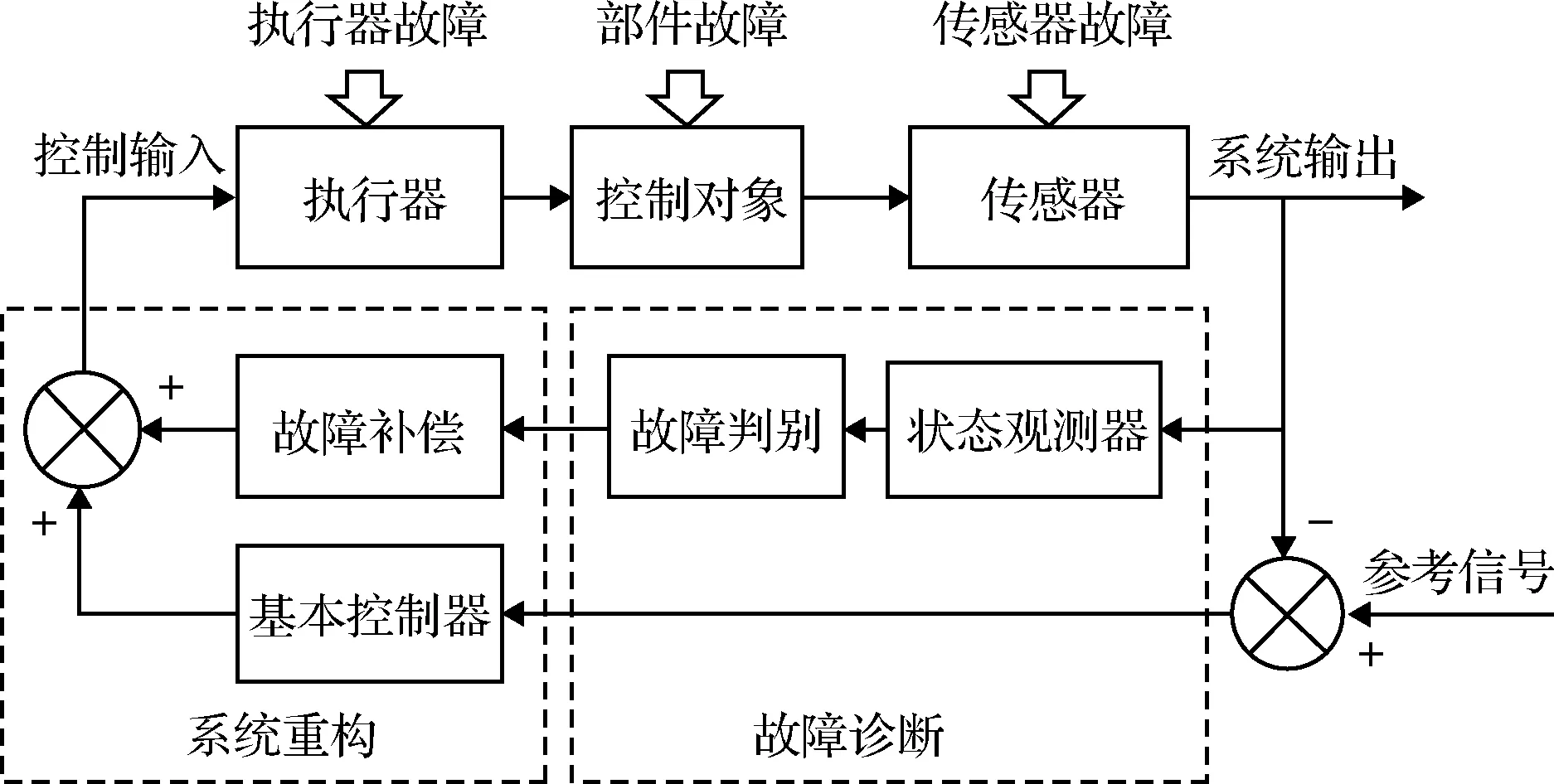
图2 基于观测器的故障诊断与系统重构方案Fig.2 Observer-based fault diagnosis and system reconfiguration scheme
综上,目前国内外关于系统资源配置与诊断重构方案综合优化方法的研究虽然取得了一定的进展和效果,但较少考虑空间飞行器正常模式与故障模式对资源配置的需求冲突,以及故障诊断与系统重构对故障处理时间的需求冲突,难以科学分配并利用系统的有限资源、充分发挥系统潜力。因此,后续需进一步解决空间飞行器有限资源配置在正常模式与故障模式下的统筹分配难题以及故障诊断与系统重构方案的协同优化难题。
1.3 诊断重构方案在轨调整方法
在诊断重构方案在轨调整方面,国内外研究多采用自适应控制方法,实现空间飞行器姿态控制系统容错方案的在轨调整。张众正[44]针对搭载冗余飞轮作为执行机构的空间飞行器,利用自适应控制技术,实现其姿态跟踪容错控制;屠园园等[45]针对卫星控制系统执行器故障,设计了一种自适应模糊滑模容错控制器,实现了在轨容错能力的有效提升;黄怡欣等[46]针对执行器故障条件下的小行星探测器姿态控制问题,提出了一种基于自适应迭代学习的容错控制方法,在探测器参量变化、外部环境干扰等不确定情况下实现了姿态控制系统的高效容错。
综上,目前国内外关于诊断重构方案在轨调整方法的研究已经取得了一定进展,但大都仅通过采用自适应控制方法保证系统在故障下的稳定性和鲁棒性,并不能保证诊断重构方案的性能在各类实际因素变化下保持最优,因此系统故障后未必能够保持高性能运行。对此,可探究诊断重构能力在长期运行过程中随资源配置等约束条件在轨变化的动态演化规律,由此指导诊断重构方案的在轨优化。
1.4 待突破难点
从技术发展趋势看,基于能力量化评估的自主诊断重构是保障未来空间飞行器安全可靠自主运行的一项关键技术,具有良好的发展和应用前景。目前国内外学者从多种角度进行了探索和研究,取得了一定进展,但因后续深空探测等任务中的空间飞行器具有不易在轨维修、资源严重受限、系统特性复杂等特点,现有理论方法在系统性和实用性等方面仍存在不足,主要待突破难点总结如下:
1)如何结合机理知识和工程数据建立完整的空间飞行器模型,实现其诊断重构能力的表征、判定和量化;
2)如何在资源严重受限下,实现有限资源配置在正常模式与故障模式下的统筹分配;
3)如何在时空严苛约束条件下,实现故障诊断与系统重构方案的协同优化;
4)如何构建诊断重构能力的演化模型,实现诊断重构过程的动态调整。
2 创新研究思路
针对上述难点,可采用理论发展和方法创新相结合的路线开展研究。总体创新思路如图3所示。
首先,构建空间飞行器数据驱动模型并利用机理知识对其进行可解释性分析,基于此发展空间飞行器可诊断性与可重构性理论,实现复杂系统诊断重构能力的表征、判定和量化,为后续的设计工作提供定量指导依据;
然后,挖掘不同模式在概率逻辑方面的因果关系和资源配置方面的耦合关系,基于此研究资源约束下正常模式与故障模式一体化设计方法,实现有限资源在不同模式下的合理分配,在设计阶段通过优化系统资源配置提升诊断重构能力;
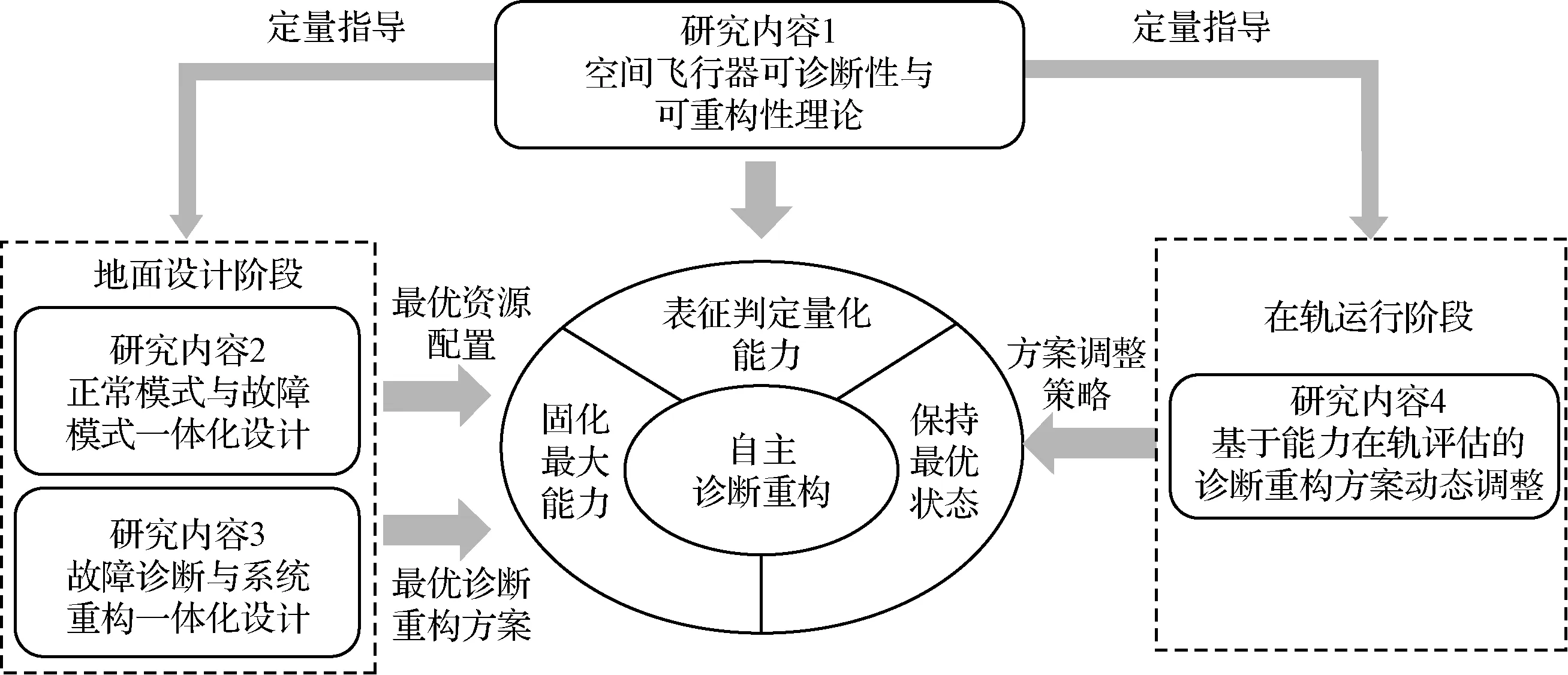
图3 总体创新思路Fig.3 Overall innovation ideas
接着,挖掘诊断与重构过程所需时间的制约机理,基于此研究时空约束下诊断与重构一体化设计方法,实现诊断重构时机的协同优化,在设计阶段通过优化诊断重构方案最大化诊断重构能力;
最后,挖掘资源配置等约束条件在轨演化规律,基于此研究系统能力在轨评估方法和诊断重构方案在轨调整方法,在运行阶段通过动态匹配诊断重构方案与当前的诊断重构能力保持系统最优状态。
2.1 空间飞行器可诊断性与可重构性理论
为实现空间飞行器诊断与重构能力的完整表征、准确判定及完备量化,针对其不易在轨维修、资源严重受限、系统特性复杂等特点,基于机理知识与全寿命周期实际工程数据,开展空间飞行器可诊断性与可重构性理论研究,具体研究思路如下。
1)空间飞行器诊断重构能力表征
如图4所示。首先,构建空间飞行器的数据驱动模型,并利用机理知识对其进行可解释性分析,准确描述系统的输入输出特性及内部状态变化;其次,对空间飞行器的全寿命周期数据进行特征提取,分析典型故障模式并建立故障模式集,以确定空间飞行器的故障空间;接着,对空间飞行器部件数量、计算机存储空间及计算能力等资源配置包络进行数学表达;最后,给出故障现象到测量信息、资源配置到重构目标的映射关系数学表征,实现空间飞行器诊断重构能力的完整表征,为诊断重构能力判定与量化奠定基础。
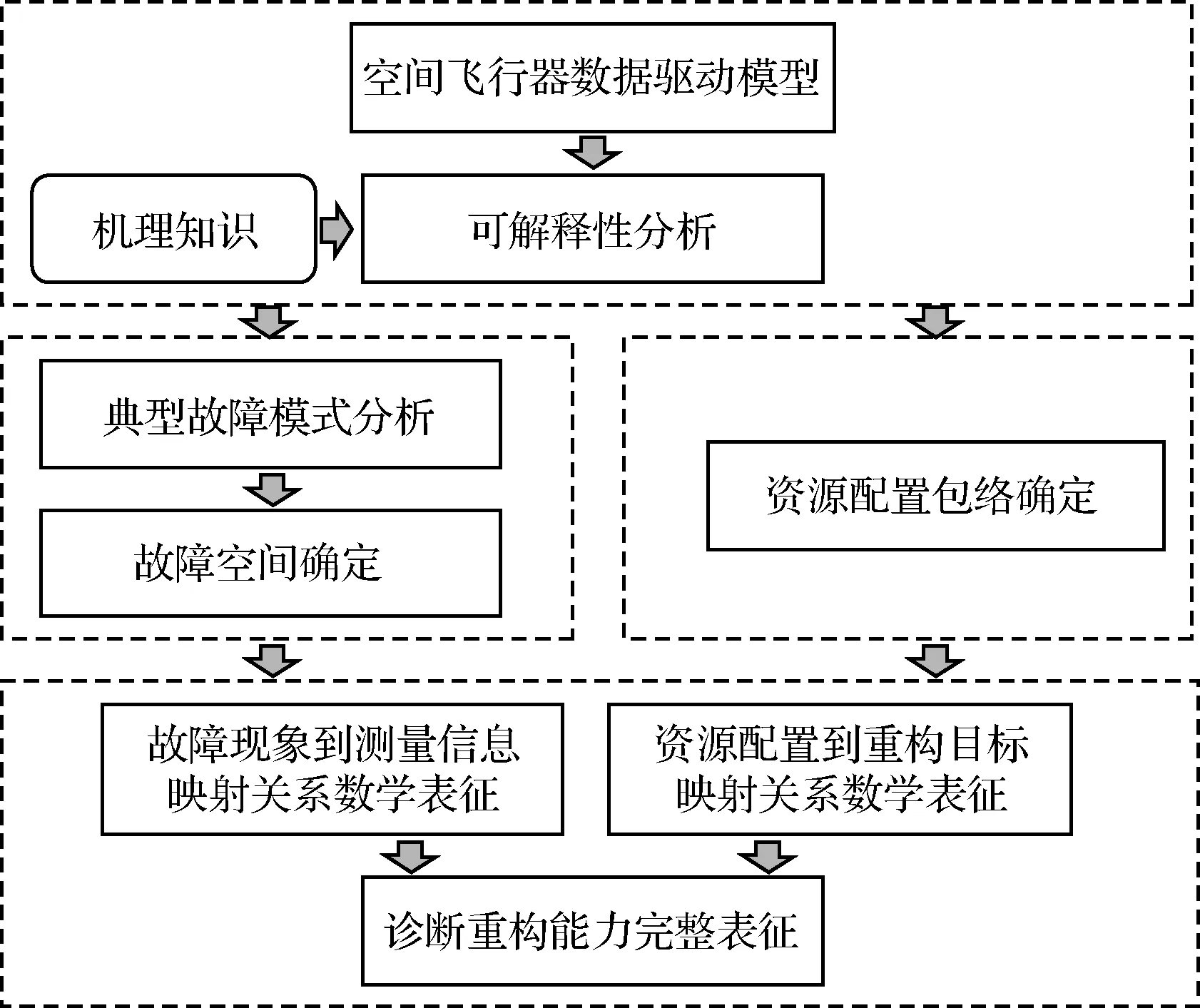
图4 空间飞行器诊断重构能力表征Fig.4 Representation of diagnosability and reconfigurability
2)空间飞行器诊断重构能力判定
如图5所示。首先,对诊断需求(检测、隔离、辨识)和重构目标(完全重构、部分重构、安全重构)进行逐层分解;其次,研究故障现象到测量信息间映射关系的连通性分析方法,建立不同诊断需求可行性分析模型,推导可诊断性判据,实现诊断能力的准确判定;最后,研究资源配置到重构目标间映射关系的连通性分析方法,建立各类时空约束条件下重构目标的可行性分析模型,推导可重构性判据,实现空间飞行器重构能力的准确判定。
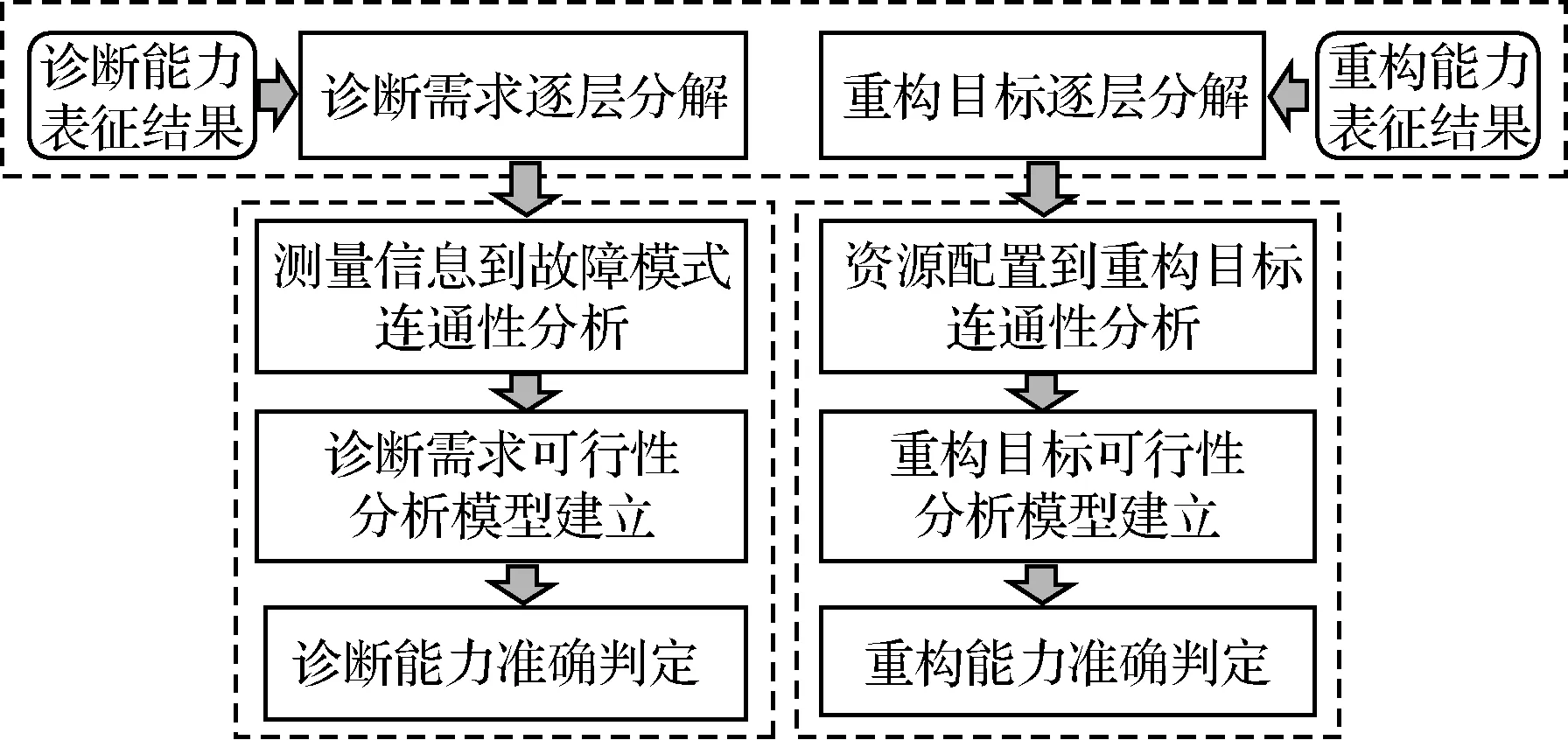
图5 空间飞行器诊断重构能力判定Fig.5 Determination of diagnosability and reconfigurability
3)空间飞行器诊断重构能力量化
如图6所示。首先,研究不同关键要素对空间飞行器诊断能力影响程度的量化分析方法,利用KL散度、黎曼距离等数学工具,从距离和方向等不同角度,对不同故障分布的差异性进行度量,建立通用的可诊断性量化评估指标体系;其次,研究不同资源配置对空间飞行器重构能力影响程度的量化分析方法,利用Gramian矩阵、李代数等数学工具,对空间飞行器在不同故障下的重构性能边界进行度量,建立通用的可重构性量化评估指标体系;最后,基于强化学习等智能算法对复杂非线性空间飞行器的能力量化指标进行数值计算,实现空间飞行器在各类资源约束与运行条件下诊断重构能力的完备量化,为后续的资源配置设计和诊断重构方案综合优化提供理论支撑。
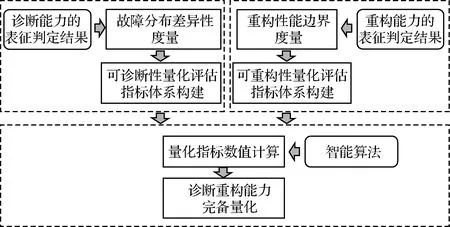
图6 空间飞行器诊断重构能力量化Fig.6 Quantification of diagnosability and reconfigurability
2.2 正常模式与故障模式一体化设计
为统筹平衡空间飞行器在正常模式与故障模式下的资源配置、有效解决资源严重受限带来的“顾此失彼”问题,以空间飞行器可诊断性与可重构性理论为基础,开展正常模式与故障模式一体化设计方法研究,具体研究思路如下。
1)标称性能与诊断重构能力关联机理构建
如图7所示。首先,从概率逻辑角度研究空间飞行器正常模式以及不同故障模式之间的因果关系,并从资源配置需求角度研究正常模式与故障模式之间的耦合关系;其次,基于不同模式间的因果关系对空间飞行器的大量故障模式进行聚类,实现多目标降维,并基于不同模式在资源需求方面的耦合关系对空间飞行器的不同资源配置进行聚类,实现多变量降维,以此简化标称性能和诊断重构能力关联机理构建过程;最后,以不同模式间的因果关系和耦合关系为抓手,对标称性能与诊断重构能力之间的关联关系进行量化表达,为空间飞行器正常模式与故障模式下平衡策略的制定提供理论依据。

图7 标称性能与诊断重构能力关联机理构建Fig.7 Correlation mechanism construction between nominal performance and diagnosability/reconfigurability
2)正常模式与故障模式平衡策略制定
如图8所示。首先,基于故障树分析,研究正常模式与不同故障模式的概率重要度评价方法,从故障概率的角度量化不同模式的重要程度;其次,基于故障模式影响分析,研究正常模式与不同故障模式的关键重要度评价方法,从故障影响的角度量化不同模式的重要程度;最后,结合概率重要度与关键重要度的分析结果,对正常模式与不同故障模式进行综合重要度评价,基于此制定正常模式与故障模式之间的平衡策略,为空间飞行器提供有限资源在正常与故障模式下的统筹分配机制。
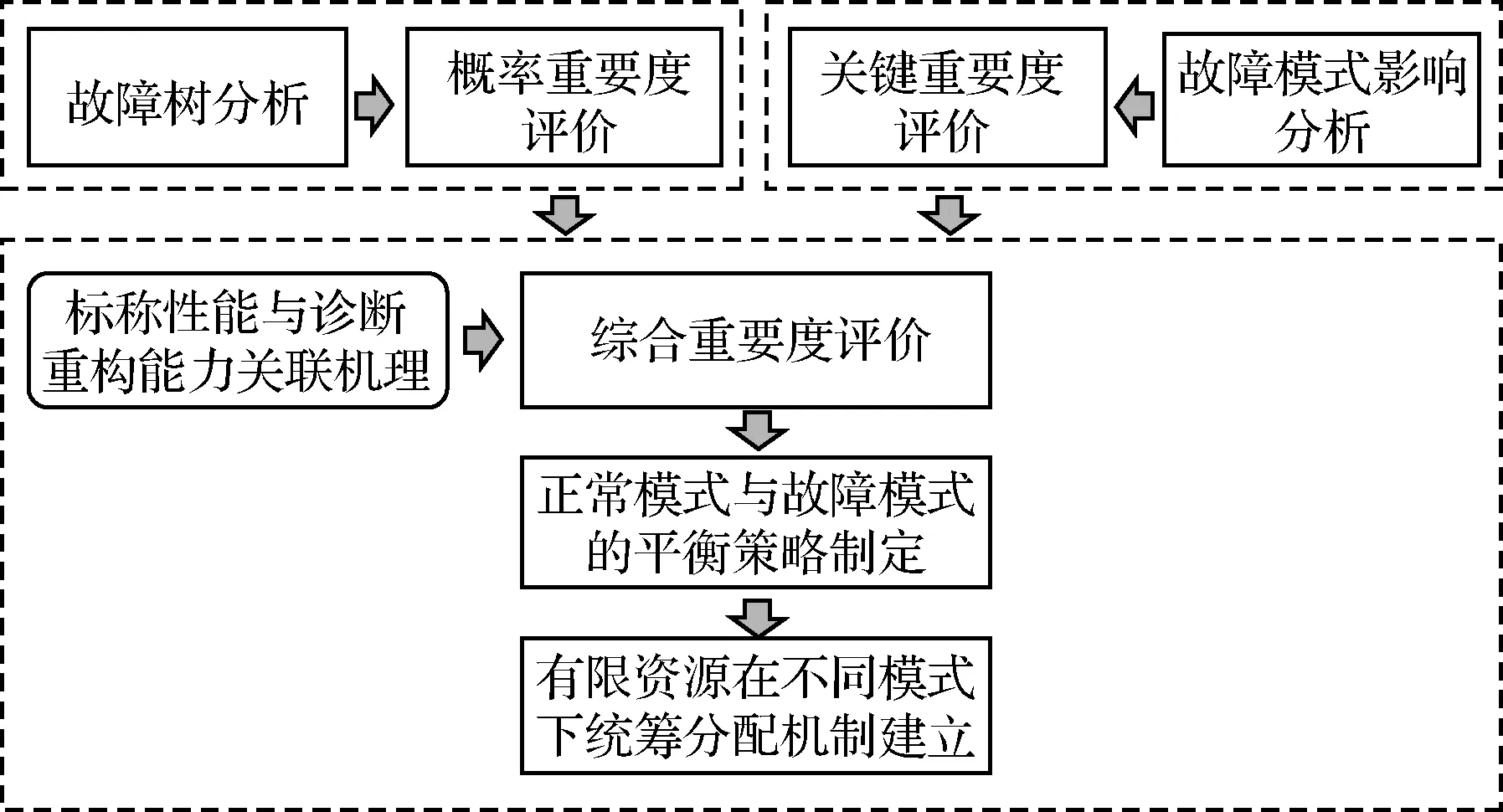
图8 正常模式与故障模式平衡策略制定Fig.8 Balance strategy between the normal and fault modes
3)正常模式与故障模式一体化设计
如图9所示。首先,基于正常模式与故障模式间的平衡策略以及具体的任务需求,制定科学的奖惩机制,并根据奖惩机制确定正常模式与故障模式一体化设计的目标函数;其次,研究空间飞行器在不同模式下资源包络的量化方法,对优化过程中的解目标空间和自变量空间进行描述,由此确定正常模式与故障模式一体化设计的约束条件;最后,基于深度强化学习等多元手段研究多目标优化问题的高效求解方法,进而对空间飞行器进行正常模式与故障模式一体化设计,实现其有限资源在不同模式下的统筹分配,在系统设计阶段提升空间飞行器标称性能与自主诊断重构能力。
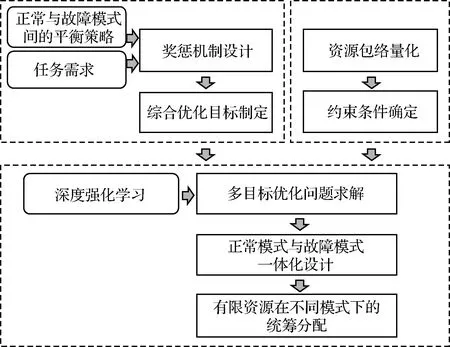
图9 正常模式与故障模式一体化设计Fig.9 Integrated design of the normal and fault modes
2.3 故障诊断与系统重构一体化设计
为了从时间上协同空间飞行器故障诊断与系统重构方案,解决故障诊断与系统重构对故障处理时间的需求冲突,以空间飞行器可诊断性与可重构性理论为基础,开展故障诊断与系统重构一体化设计方法研究,具体研究思路如下。
1)诊断能力与重构能力关联机理构建
如图10所示。首先,通过分析诊断时间对诊断算法收敛性和诊断精度的影响,量化诊断时间对诊断能力的作用机理;其次,通过分析重构时机对重构算法收敛性和重构效果的影响,量化重构时机对重构能力的作用机理;最后,通过分析诊断时间对重构时机的制约、诊断精度对重构效果的影响,构建诊断能力与重构能力的关联机理,为故障诊断与系统重构协同优化提供依据。
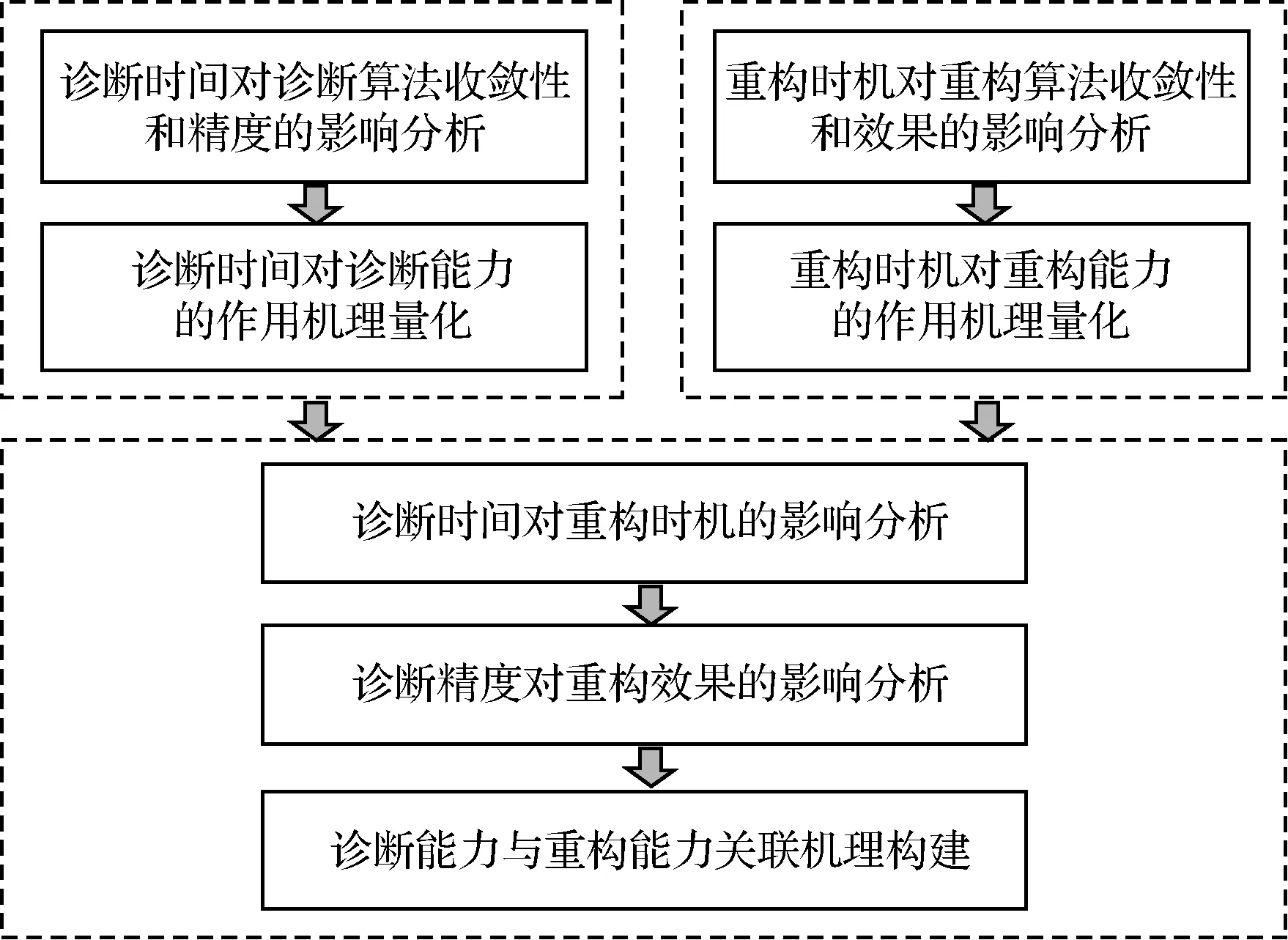
图10 诊断能力与重构能力关联机理构建Fig.10 Correlation mechanism construction between diagnosability and reconfigurability
2)故障诊断和系统重构算法设计
如图11所示。首先,基于先验信息,通过格式标准化、异常数据清除等方式,实现故障样本数据的预处理,考虑到不同任务需求对诊断重构深度(部件级、系统级)的要求不同,对样本进行分层,利用分层聚类算法对空间飞行器故障数据进行分析,实现样本数据的准确分类;其次,对已分类数据进行特征提取,通过添加噪声、变化强度和裁剪等方法对故障样本数据进行增广,扩充数据集规模,实现正常样本与故障样本的数据平衡,为故障诊断与系统重构算法设计提供充足的数据支持;最后,利用增广的故障样本数据集,基于机器学习算法和微分对策理论等工具设计面向在轨应用的轻量化故障诊断算法与系统重构算法,实现计算资源严重受限条件下的空间飞行器故障诊断与系统重构,为其故障诊断与系统重构的协同优化提供基本算法。
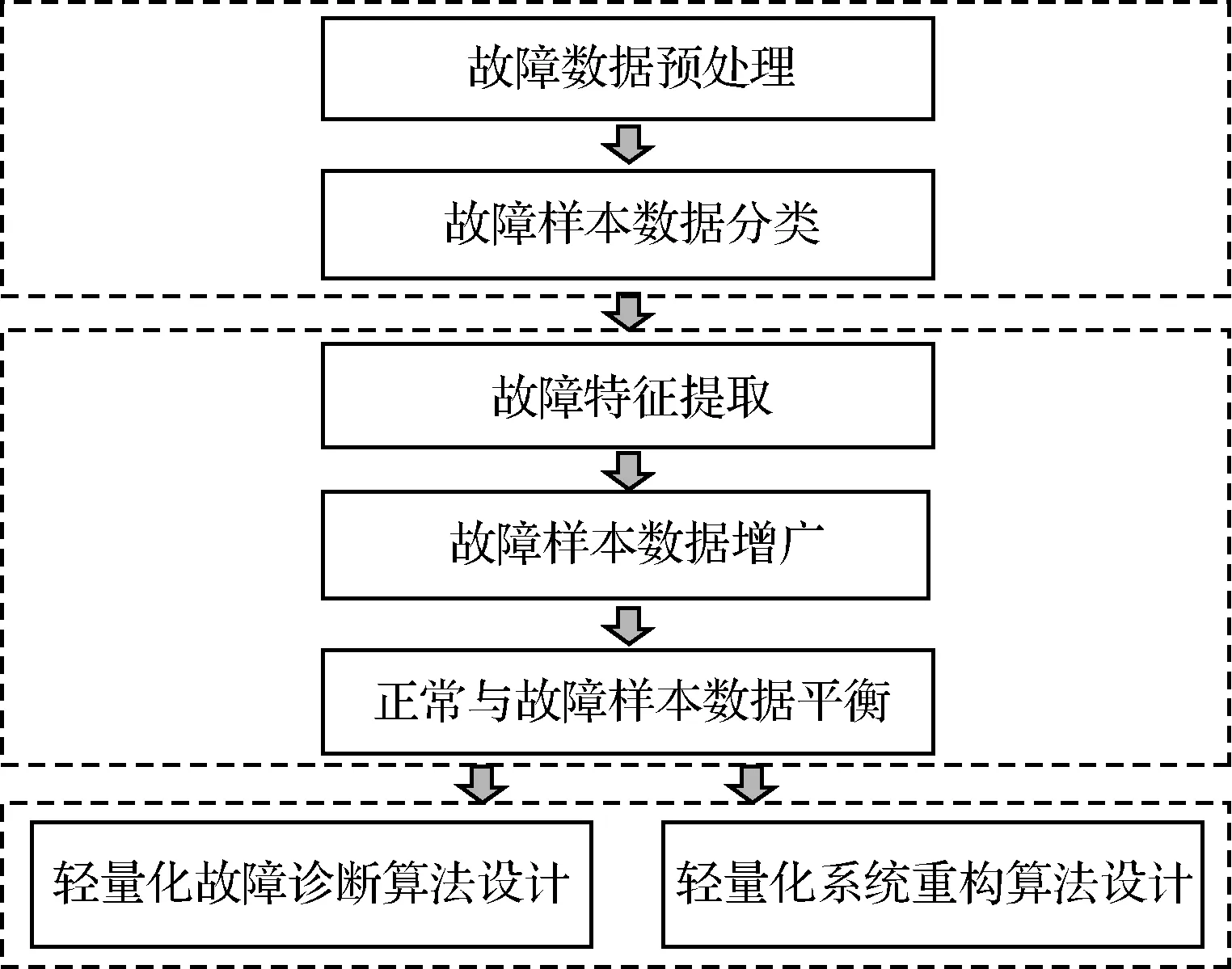
图11 故障诊断和系统重构算法设计Fig.11 Design of the fault diagnosis and system reconfiguration algorithm
3)故障诊断与系统重构一体化设计
如图12所示。首先,基于构建的诊断能力与重构能力关联机理,量化诊断时间、诊断精度对重构效果的影响,以此构建综合的重构性能评价指标,作为空间飞行器诊断重构方案设计的统一优化目标函数;其次,基于不同因素对诊断能力和重构能力的影响机理和空间飞行器可诊断性与可重构性理论,分析诊断重构时间约束和可用资源配置包络,确定故障诊断与系统重构一体化设计的约束条件;最后,描述优化过程中解的目标空间和自变量空间,并结合强化学习等方法求解多约束优化问题,以搜索最优的诊断重构算法参数以及诊断时间与重构时机,实现故障诊断与系统重构的一体化设计,确保诊断重构能力的协同优化;基于空间飞行器正常模式与故障模式、故障诊断与系统重构的一体化设计结果,得到其自主诊断重构的地面最优设计方案。
2.4 基于能力在轨评估的诊断重构方案动态调整
为实现空间飞行器在轨诊断重构能力的动态优化,针对其在轨资源配置包络与可处理故障空间变化导致诊断重构能力难以保持最优状态的问题,考虑故障传播、性能退化等实际因素,以“两个一体化”设计结果为基础,开展基于能力在轨评估的诊断重构方案动态调整方法研究,具体研究思路如下。
1)资源配置在轨演化规律及闭环系统极限能力分析
如图13所示。首先,针对空间飞行器在轨实际影响因素,包括故障传播(单一故障、耦合故障等),性能退化(电池性能下降、部件磨损、推进剂消耗等)等,分析各因素对空间飞行器可用资源配置包络的影响,利用主成分分析等特征选择算法提炼可用资源配置包络的主要变化特性;然后,利用建模与反馈结合的闭环系统理论分析手段,实现闭环系统反馈机制对抗异常和故障等不确定性因素极限能力的动态评估,以确定空间飞行器可处理故障空间的变化特性。
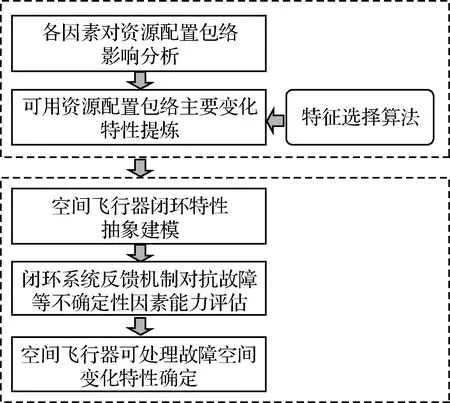
图13 资源在轨演化规律及闭环极限能力分析Fig.13 Analysis of on-orbit resource evolution law and closed-loop system’s ultimate capacity
2)空间飞行器诊断重构能力在轨评估
如图14所示。首先,分析可用资源配置包络和可处理故障空间变化对诊断重构能力的作用机制,构建空间飞行器诊断重构能力的在轨演化模型;然后,面向空间飞行器计算资源严重受限的现状,利用网络剪枝、权值量化、低秩近似等技术从模型结构、参数规模等角度实现空间飞行器诊断重构能力评估算法的轻量化,以降低其在轨计算负荷、提升其在轨计算效率,实现有限计算资源下空间飞行器诊断重构能力的在轨轻量化评估,为其诊断重构方案的在轨动态调整提供定量的指导依据。
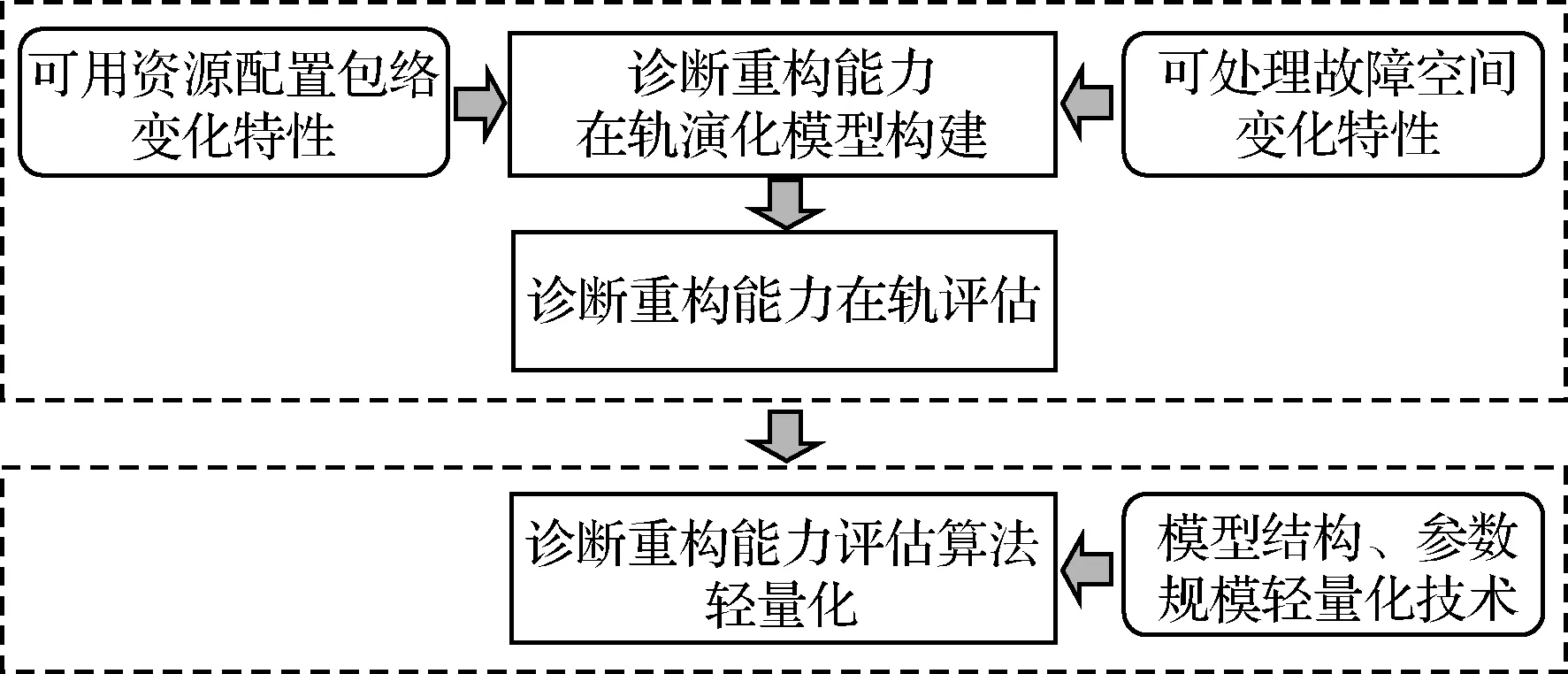
图14 空间飞行器诊断重构能力在轨评估Fig.14 On-orbit evaluation of diagnosability/reconfigurability
3)诊断重构方案在轨动态调整
如图15所示。首先,基于可用资源配置包络和闭环系统可处理故障空间的变化特性,建立方案在轨调整的动态阈值,根据诊断重构能力评估结果和动态阈值的比对,实现诊断重构方案调整时机的自主决策;然后,基于能力评估-方案调整-预期结果的动态反馈,在给定的调整时机对空间飞行器的诊断方案与重构方案进行在轨动态调整,实现诊断重构方案与系统当前诊断重构能力的动态匹配,使系统诊断重构方案在空间飞行器长期运行过程中一直保持最优状态。
3 结束语
本文以诊断重构能力的定性判定和定量表达为突破口,提出了基于诊断重构能力量化评估的空间飞行器自主诊断重构方法:通过研究可诊断性与可重构性理论,实现系统诊断重构能力的表征、判定和量化;以此为指导,提出正常模式与故障模式一体化设计方法,实现空间飞行器有限资源在不同模式下的统筹分配,并提出故障诊断与系统重构一体化设计方法,实现空间飞行器诊断方案与重构方案的协同优化,进而在设计阶段从资源配置和诊断重构方案两个角度共同保证系统诊断重构能力的最大化。此外,通过挖掘空间飞行器所面临约束条件的在轨演化规律,提出基于能力在轨评估的诊断重构方案动态调整方法,进而在运行阶段保持系统最优状态,全面提升空间飞行器的自主诊断重构水平。
