多源干扰下高超声速飞行器自主精细控制
2023-05-19王陈亮朱玉凯乔建忠
郭 雷,王陈亮,王 雨,朱玉凯,乔建忠
(1. 北京航空航天大学自动化科学与电气工程学院,北京 100191;2. 北京航空航天大学宇航学院,北京 100191)
0 引 言
高超声速飞行器(HFV)是国防装备和民用空天技术的重要发展方向。在军事领域,高超声速飞行器是各军事强国争相研制的利器,俄罗斯在2022年俄乌冲突中将高超声速武器首次投入实战,美国以《国防工业生产法》来急速推进高超声速武器研发,美国首款陆基高超声速武器“暗鹰”和首款空基高超声速导弹AGM-183A即将服役。在民用领域,2022年8月中国亚轨道运载器首次成功实现重复使用飞行,高超声速飞行器成为天地航班化高效飞行和全球极速运输的关键载体。
大空域、宽速域、高动态、一体化构型、多样化任务等特征使得高超声速飞行器本体、飞行环境和飞行任务充满干扰和不确定性[1-3],飞行器在飞行过程可能面临故障损伤、突发威胁、器件退化、燃料快速消耗、烧蚀变质心、机体变形、动力不确定等问题。例如,2010年5月,美国空军实验室X-51A高超声速飞行器进行第一次飞行试验,在发动机切换到纯燃料工作140 s后遭遇故障,飞行任务失败。2012年8月,X-51A进行第三次飞行试验,在飞行约31 s后,控制舵面发生故障,导致飞行器失去控制。2021年10月,美国陆军和海军联合进行高超声速助推滑翔导弹飞行试验,因遭遇助推器异常而失败。事实上,大多数事故是由非理想条件、未设定模式和强不确定环境造成的。
因此,由强不确定因素、未预设突变和强博弈对抗态势等引起的“极端”飞行环境是制约高超声速飞行器控制系统自主性、精确性和可靠性的主要因素之一。与此同时,高超声速飞行器本身是强耦合、强不确定、强非线性、静不稳定、快时变、多约束、欠驱动系统。为实现高超声速飞行器的高可靠和智能化目标,飞行器控制技术需从适应偏差向适应本体、适应环境和适应任务升级[4-8],需要提高飞行器控制系统在线学习和应对极端环境的能力。然而,相比于理想环境,极端环境下飞行器的多源干扰和不确定性问题极为突出,极端环境也会将耦合、时变、约束等因素的影响放大,使得传统控制方法难以满足高超声速飞行器超稳、超快、超准的控制需求。如何实现多源干扰下飞行器自主精细控制,赋予飞行器强自主、强适应、强生存等智能行为能力,是高超声速飞行器研发中需要解决的核心技术问题。
本文从高超声速飞行器自主精细控制需求出发,梳理了国内外研究现状,探讨了极端环境下多源干扰与不确定性表征以及飞行器深耦合系统建模方法,提出了干扰在线预示、风险在线预警和强抗扰控制策略,并给出了一些值得深入探索的挑战性技术难题以及可能的解决思路,旨在弥补传统方法“预设任务、理想环境、程序化控制”的不足,推动高超声速飞行器控制系统技术的发展。
1 多源干扰与不确定性表征
为研究极端环境下飞行器的控制问题,首先要对各种典型干扰和不确定性进行表征和模拟。根据多源干扰系统理论[9],本部分从外部、内部和模型不确定性三个方面进行阐述。
气动因素是高超声速飞行器的外部干扰。对于大气扰动中的紊流和风切变,可分别利用Dryden紊流模型和边界层急流模型来表征[10];对于执行机构故障和退化,可以融合失效因子和加性/乘性故障进行表征[11];对于结构性损伤,可采用非连续切换系统模型来刻画[12]。另外,在军事对抗环境下,主动电磁干扰会严重影响导航和控制系统性能。
高超声速飞行器动力系统不确定性可看作系统内部干扰。例如,超燃冲压发动机产生的推力与马赫数、攻角、燃料当量比等存在复杂的非线性动静耦合关系。传统面向控制的高超声速飞行器模型[13-16]普遍采用多项式来拟合推力与马赫数、攻角、燃料当量比之间的关系,该方法存在显著误差和不确定性。近年来,利用影响系数法建立超燃冲压发动机模型的研究日益引起关注。文献[17]综合考虑了壁面摩擦、壁面传热、燃烧效率等干扰影响,基于影响系数法构建了包含连续性方程、动量方程、能量方程、气体状态方程在内的发动机流场和推力表征模型。文献[18]考虑了溢流效应影响,基于影响系数法计算了发动机推力,并对其中的不确定性进行了定量分析。
在高超声速飞行过程中,气流因受到强烈压缩和摩擦作用而会对机体产生极端气动加热现象。高超声速飞行器通常利用机体表面热防护材料的烧蚀来吸收热量,从而达到保护核心部件的目的。然而,机体烧蚀也造成了飞行器质量损失,进而导致飞行器转动惯量和质心变化,这可视作一种模型不确定性。文献[19]结合飞行器热防护材料的化学特性,通过有限元数值仿真分析了热防护材料的烧蚀速度。文献[20]提出了一种长短期记忆网络方法来模拟高超声速飞行器的烧蚀量,并通过地面烧蚀试验验证了其有效性。文献[21]给出了一种飞行器烧蚀质量估算方法,涉及飞行器几何外形、热防护材料和温度场的多个参数。另一方面,液体燃料在有动力高超声速飞行器总质量中的占比较高,例如,在文献[22]所研究的吸气式高超声速飞行器中,燃料质量占总质量的53.7%。因此,贮箱内燃料消耗和晃动对飞行器的影响不可忽视。类似于烧蚀,燃料消耗也会引起飞行器质量、转动惯量和质心变化[22-23]。从烧蚀质量和剩余燃料出发,结合飞行器外形参数和质量分布,利用多体动力学建模可表征质心变化的影响[24-25],质心变化使得传统单一平衡点形式的飞行器模型难以适用。此外,现有文献一般采用等效力学模型(如单摆模型和弹簧-质量模型)来模拟贮箱内的燃料晃动[26-27],进而将晃动产生的力和力矩融合到飞行器动力学方程中。
传统高超声速飞行器模型大多仅考虑飞行器自身的动力学特性,未深入探索极端环境导致的多源干扰因素与飞行器状态的时空动态关联关系。极端环境造成的干扰具有多来源、多类型、多通道特征,在数学表征上呈现出加性、乘性以及与飞行器状态深耦合的隐性等形式。因此,亟需开展飞行器姿态/轨迹/干扰一体化表征的深耦合系统建模方法研究。
2 干扰在线预示与风险在线预警
为提升飞行器控制系统极端环境下的适应性和安全性,基于在线估计的干扰预示和风险预警尤为重要。干扰/异常信号观测器是实现干扰预示和风险预警的重要途径,可以根据需要灵活设置在飞行器的不同回路中,可视为一种无传感的软测量技术。文献[28]为高超声速飞行器姿态系统设计了线性干扰观测器,文献[29]构造了非线性干扰观测器以估计飞行器纵向运动模型中的外界干扰。文献[30]设计了滑模干扰观测器来估计飞行器弹性振动,文献[31]提出了神经网络干扰观测器来应对纵向运动中的未知非线性扰动,文献[32]基于跟踪微分器为飞行器纵向运动模型设计了干扰观测器。针对高超声速飞行器上升段三维制导控制一体化模型,文献[33]提出了非线性干扰观测器来估计阵风等扰动。为估计飞行器舵面故障,文献[34-35]设计了固定时间观测器和自适应变增益观测器。文献[36-37]引入了自学习机制来在线辨识飞行器的执行机构退化因子。文献[38-41]将高超声速飞行器控制系统中所有的干扰和不确定性视为变化率有界的集总扩张状态,并构造扩张状态观测器对其进行估计。
总之,现有方法初步具备了对于特定典型干扰和故障的预示和预警功能。但是,针对高超声速飞行器极端环境下的多源干扰和异常信号估计、分离、预测和溯源能力还有待提升。就干扰在线预示和风险在线预警问题,仍需结合多源干扰系统理论开展系统性的研究工作。
3 高超声速飞行器自主精细抗干扰控制
作为目前工业领域使用最为广泛的控制方法,PID控制具有补偿阶跃干扰的能力。然而,高超声速飞行器的强非线性、强不确定和快时变特性以及极端环境下的多源干扰使得PID控制难以保证系统稳定性和控制品质。针对高超声速飞行器六自由度运动的线性特征模型,文献[42]提出了一种自适应控制方法。文献[43]针对纵向运动的线性化模型给出了一种抗饱和切换控制策略,文献[44]则基于纵向运动的时变线性模型设计了指令跟踪控制器。
为应对高超声速飞行器的强非线性,许多基于非线性模型的控制方法被陆续提出。文献[15]针对一类高超声速飞行器的非线性纵向运动模型,提出了一种多输入多输出滑模控制方法。文献[45]设计了一种非线性H∞控制器,文献[46]给出了一种非线性模型预测控制方法,文献[47]则将自适应动态规划应用到了高超声速飞行器。基于浸入与不变控制技术,文献[48]进行了输出反馈控制器设计。为处理非匹配干扰和不确定性,文献[49-50]提出了自适应反步控制方法,文献[51-52]则进一步引入动态面技术来克服反步设计的“微分爆炸”问题。为提升过渡过程品质,文献[53]构造了指定性能控制器。上述控制方法可有效处理参数不确定性和抑制范数有界干扰。
在任何工作中,都需要专业人才的辅助和支持,农村基层统计工作需要人才的加入。但是由于农村的环境和条件有限,一直无法吸引专业人才加入,很多地区的农村基层统计工作都是由兼职人员来完成。工作人员在年龄、素质和水平方面都不达标,也没有接受专业化的技能培训,这也导致了统计队伍整体水平不高,所以农村基层统计工作急需专业人才的加入[1]。
为增强系统的抗干扰能力,具有干扰估计和补偿能力的主动抗干扰控制方法备受关注。针对高超声速飞行器,文献[28-35]提出了多种基于干扰观测器的控制(Disturbance observer-based control,DOBC)方法。以扩张状态观测器为核心,文献[38-41]为高超声速飞行器设计了自抗扰控制(Active disturbance rejection control,ADRC)策略。上述主动抗干扰控制方法已初步得到应用。然而,DOBC和ADRC方法大多局限于单一同质等价干扰,忽略了干扰的多源性和动态特征,难以进行干扰预示和风险预警。针对多源干扰系统,复合分层抗干扰控制(Composite hierarchical anti-disturbance control,CHADC)框架包括干扰估计、前馈补偿和反馈抑制等环节[9,54-56],已被广泛应用于卫星、无人机等飞行器对象,显著提高了自主精细控制能力。
在CHADC的理论框架下,通过充分融合DOBC和ADRC各自优势,可针对高超声速飞行器提出强抗扰控制(Enhanced anti-disturbance control,EADC)方法。以一类滑翔类高超声速飞行器为例,其姿态系统模型可描述如下[34,38]:
(1)
(2)
(3)
式中:α,β,γv,θ,m和V分别为飞行器攻角、侧滑角、倾侧角、航迹倾角、质量和速度;g,L和Z分别为重力加速度、升力和侧向力;ωl,ωm和ωn分别为滚转角速度、俯仰角速度和偏航角速度;Il,Im和In为三轴转动惯量;Ml,Mm和Mn分别为滚转力矩、俯仰力矩和偏航力矩,其表达式为
(4)
式中:ρ,S,b和l分别为大气密度、飞行器参考面积、翼展和平均气动弦长。在忽略一些影响较小的因素后,力矩系数cl,cm和cn可表示为
(5)
(6)
(7)
(8)

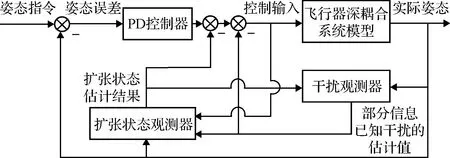
图1 强抗扰控制框图Fig.1 Diagram of enhanced anti-disturbance control
4 飞行器精细抗干扰控制系统性能仿真测试评估
作者团队基于“干扰表征-方法设计-性能评估”三维表征的仿真测试思想,在MATLAB环境下开发了面向极端环境的高超声速飞行器控制性能测试评估软件。软件涵盖飞行器标称模型模块、极端环境干扰模拟与注入模块、控制方法模块、性能对比分析模块等,其中控制方法模块包括ADRC等传统控制方法和强抗扰控制方法。在综合考虑极端环境因素和飞行器力/力矩系数不确定性的情形下,结合蒙特卡洛仿真对不同控制方法进行测试评估。
在测试过程中,将高超声速飞行器三轴舵面均设置为失效50%,将飞行器质量和转动惯量设置为每200 s均匀减少其初始值的1%来部分模拟机体烧蚀的影响。在此基础上,将飞行器力和力矩系数在[-40%, 40%]范围内随机组合拉偏,针对EADC和ADRC两种控制方法进行蒙特卡洛测试,其中每次蒙特卡洛测试包含50次仿真。测试结果如图2~3所示,其中不同曲线代表不同单次仿真中飞行器高度和攻角变化情况,超出图边界的曲线对应失稳的仿真结果。在50次仿真中,EADC有47次完成下压段飞行,3次失稳,通过率为94%;ADRC有29次完成下压段飞行,21次失稳,通过率为58%。
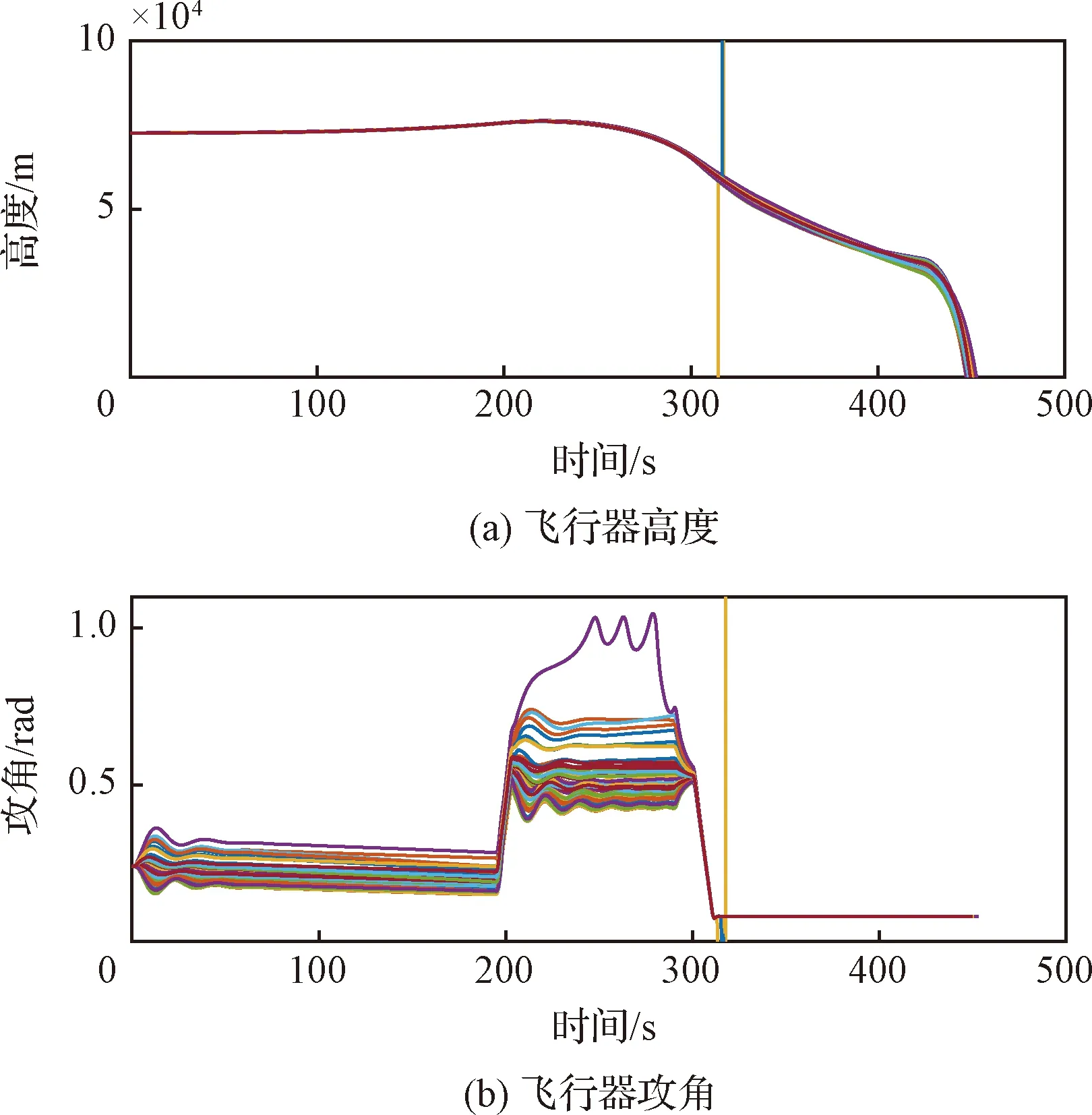
图2 EADC测试结果Fig.2 Test results of EADC
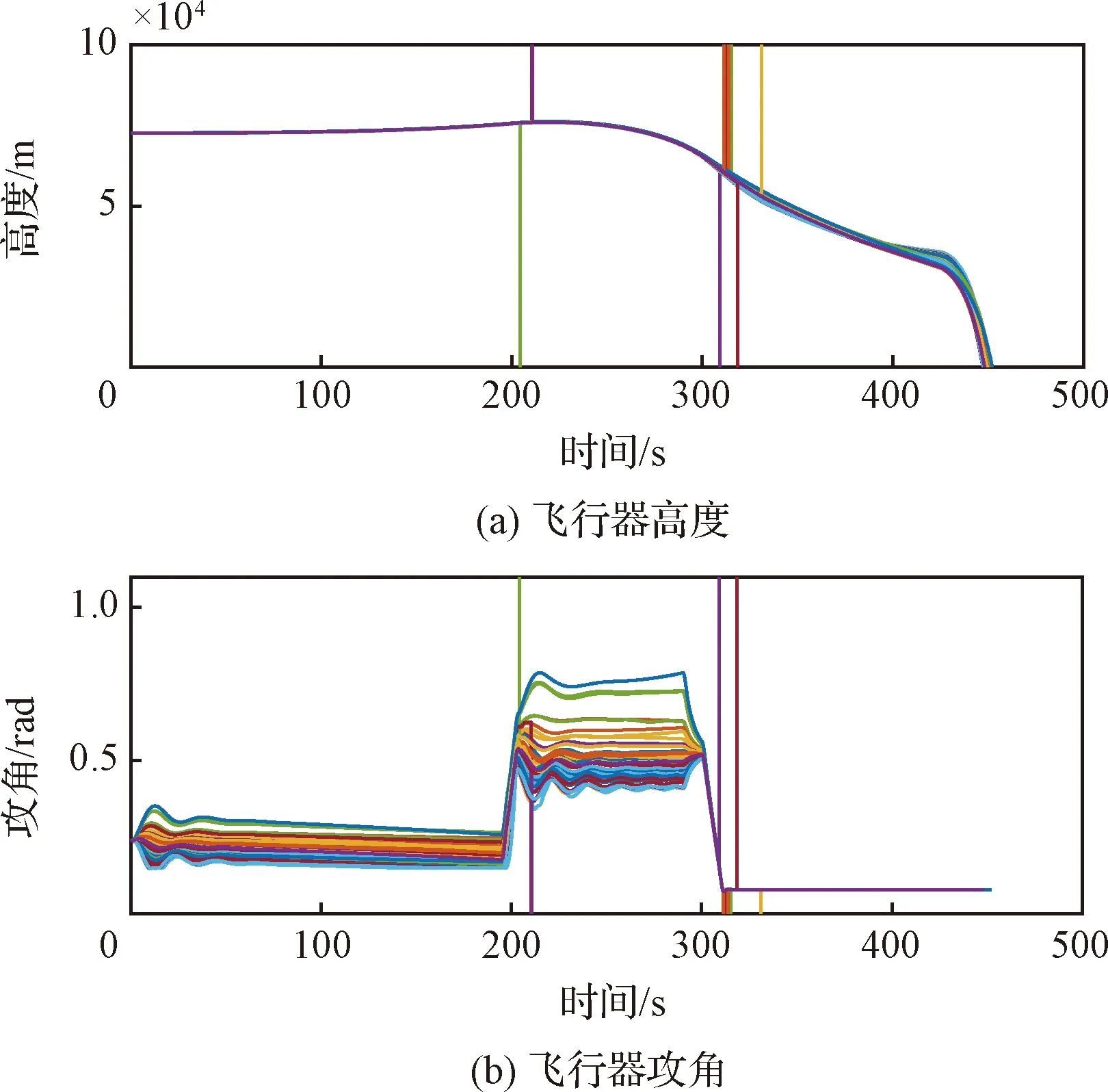
图3 ADRC测试结果Fig.3 Test results of ARDC
从测试结果可以看出,EADC具有较强的环境适应性和可靠性,而ADRC应对极端环境的能力不足。
5 研究展望
在国内外现有研究成果的基础上,为进一步提升高超声速飞行器极端环境下的自主性、适应性和可靠性,以下关键技术领域值得深入探索。
1)飞行器深耦合系统建模与可控能力量化。针对极端环境下高超声速飞行器强不确定、强耦合和多源干扰等问题,需开展机理和数据混合驱动的控制系统建模与验模方法研究,深入挖掘干扰与飞行器状态、输入、输出以及其他干扰之间的交联耦合特征,探索干扰的传递机理和影响边界,突破极端环境下系统可控能力量化、飞行器平衡状态重构优化等关键技术。
2)多源干扰在线预示和异类风险在线预警。针对极端环境相关的加性、乘性、隐性等多源异质异构干扰,需进一步开展因果和溯源分析,发展干扰的可观测性、可分离性与可补偿性理论。同时,根据飞行器的响应数据和物理机理,分析飞行器所受干扰的来源和形式,在线辨识和预示极端环境干扰,探索失效、退化、损伤、威胁等异类风险因素的识别、量化与预测方法。
3)变质心情形下多通道协调智能强抗扰控制。针对高超声速飞行器机体烧蚀、燃料消耗与晃动等因素带来的质心变化问题,需融合干扰抑制、补偿和消纳(利用)机制,开展多通道协调智能强抗扰控制方法研究,突破多通道协调自调参强抗扰控制、混合异类执行机构控制自分配等关键技术,满足飞行器变质心条件下高精度控制需求。
4)基于事件触发机制的全回路安全调控。面向失效、退化、损伤、威胁等多类风险,需在飞行器“感知-决策-控制-执行”全回路的框架内,融合干扰在线预示和风险在线预警,开展基于事件触发机制的安全调控方法研究,突破动态事件触发机制设计、在线快速制导重构、在线柔性控制重构等关键技术,赋予飞行器异常状态下自主动态调节能力。
6 结束语
围绕极端环境下高超声速飞行器强自主、强适应、强生存等智能行为需求,本文探讨了器件失效退化、烧蚀变质心、燃料消耗晃动、动力不确定性等多源干扰与不确定性表征和飞行器深耦合系统建模方法。在此基础上,提出了具有干扰在线预示和风险在线预警能力的强抗扰控制方法,并给出了一些值得深入探索的挑战性难题以及可能的解决思路。飞行器自主精细抗干扰控制研究的目的是提升飞行器极端环境下强自主、强适应、强生存等智能行为能力,实现从单一同质干扰估计到复合干扰分离和利用、从干扰不变到适应可变、从传统稳定性到均衡性的跨越,推动高超声速飞行器控制系统技术的发展。