卫星总体与姿态控制一体化优化设计方法
2023-05-19陈小前陈献琪
陈小前,陈献琪,曹 璐,张 翔,姚 雯
(1. 军事科学院,北京 100091;2. 军事科学院国防科技创新研究院,北京 100071)
0 引 言
以多学科设计优化(MDO)为核心的飞行器总体优化理论,主要用于概念设计阶段,通过将结构、动力、气动等多个紧密耦合的学科一体化设计,实现综合设计性能的优化[1-3]。粟华等[4]针对空间机动飞行器的多学科设计优化问题,构建了考虑轨道、电源、结构、推进和姿轨控5个学科的耦合优化模型,研究了连续和离散混合变量的MDO求解技术,优化后的飞行器总质量指标降低了约18%。龚春林等[5]将多学科设计优化思想引入到导弹方案总体设计问题中,基于多学科并行设计思想,开发了面向导弹总体设计的多学科设计优化原型系统。吴文瑞等[6]重点研究了多学科设计优化中的协同优化技术,在遥感卫星总体参数设计问题中进行了方法有效性验证。龙腾等[7]以对地观测卫星为研究对象,建立了考虑轨道、控制、有效载荷、电源及结构分系统设计约束的多学科优化模型,提出了一种约束高效全局优化算法,并通过算例验证了所提方法的有效性和工程适用性。姚雯等[8]针对卫星总体设计问题,研究了考虑不确定性条件下的多学科设计优化方法,提升了卫星设计的稳健性和可靠性。叶年辉等[9]重点针对固体火箭发动机开展了多学科设计优化研究,结合Kriging代理模型提出了一种多目标自适应优化方法。姜欢等[10]针对面对称飞行器开展了飞行器气动外形优化设计研究,实现了多学科耦合集成优化设计。
尽管飞行器多学科设计优化技术取得了较为丰硕的理论和应用成果,但工程实践表明,现有理论研究仍存在一定局限性。首先,总体设计实质为总体方案静态参数优化,没有考虑飞行过程的运动参数/控制变量优化,无法实现效益综合最优;总体方案确定的硬件条件是对控制过程的强约束,割裂两者的设计,会导致方案迭代效率低下,也难以达到整体最优。因此,飞行器系统性能最优必须统筹总体方案的静态参数与任务过程的动态控制,以任务能力为导向,实现静/动耦合、软/硬一体的综合优化,创新发展总体与控制一体化设计的基础理论。尤其是对于需要长期在轨运行的卫星,系统控制对于任务成败极其关键,探索总体与控制一体化设计方法显得尤为重要。
面向更加复杂的卫星在轨任务和系统控制要求,迫切需要在卫星总体设计阶段就充分考虑应用阶段的动态任务及其控制过程。本文通过开展卫星总体参数与控制过程的一体化精细优化研究,提出了一种卫星总体与姿态控制一体化优化设计方法,并将其应用于某具有敏捷姿态机动功能的对地观测卫星的总体设计。针对该卫星的姿态机动场景,建立了总体设计学科简化模型,重点讨论了姿态控制分系统学科模型与总体设计强耦合关系,通过对该卫星的总体与姿态控制一体化优化问题进行求解,获得了比传统卫星总体设计方法性能指标更优、冗余度更低的设计方案。
1 卫星总体与姿态控制一体化优化设计方法
卫星可以分为有效载荷和卫星平台两个主要部分,卫星平台具体包括结构、电源、推进、姿态确定与控制、热控、测控、数据管理等多个相互关联的分系统。因此卫星优化设计是一个典型的复杂多学科耦合设计问题。
目前,卫星设计通常采用先总体优化设计后分系统详细设计的串行设计流程[11],如图1所示,以卫星姿态控制分系统的详细设计为例,首先进行卫星总体多学科设计优化得到较优的卫星总体设计参数,然后基于当前卫星设计参数构建相应的姿态动力学系统,开展卫星姿态的最优控制算法设计工作,通过仿真分析验证卫星姿态控制效果。当前的串行设计流程看似递进自然,但却忽略了卫星姿态控制系统设计参数和卫星总体设计参数之间的相互作用,导致卫星总体设计性能无法充分挖掘。比如,卫星结构分系统直接关系到卫星的转动惯量特性,进而决定了卫星姿态动力学系统的控制难度,会导致在相同的控制能力下,卫星姿态机动的响应时间存在差异。这对于敏捷卫星的设计至关重要。进一步,卫星在轨姿态变化也会影响太阳能电池阵的太阳光入射角度,从而影响电源系统的供电功率。如果在卫星总体参数设计阶段直接按照最坏情形进行设计,则存在一定的设计冗余。
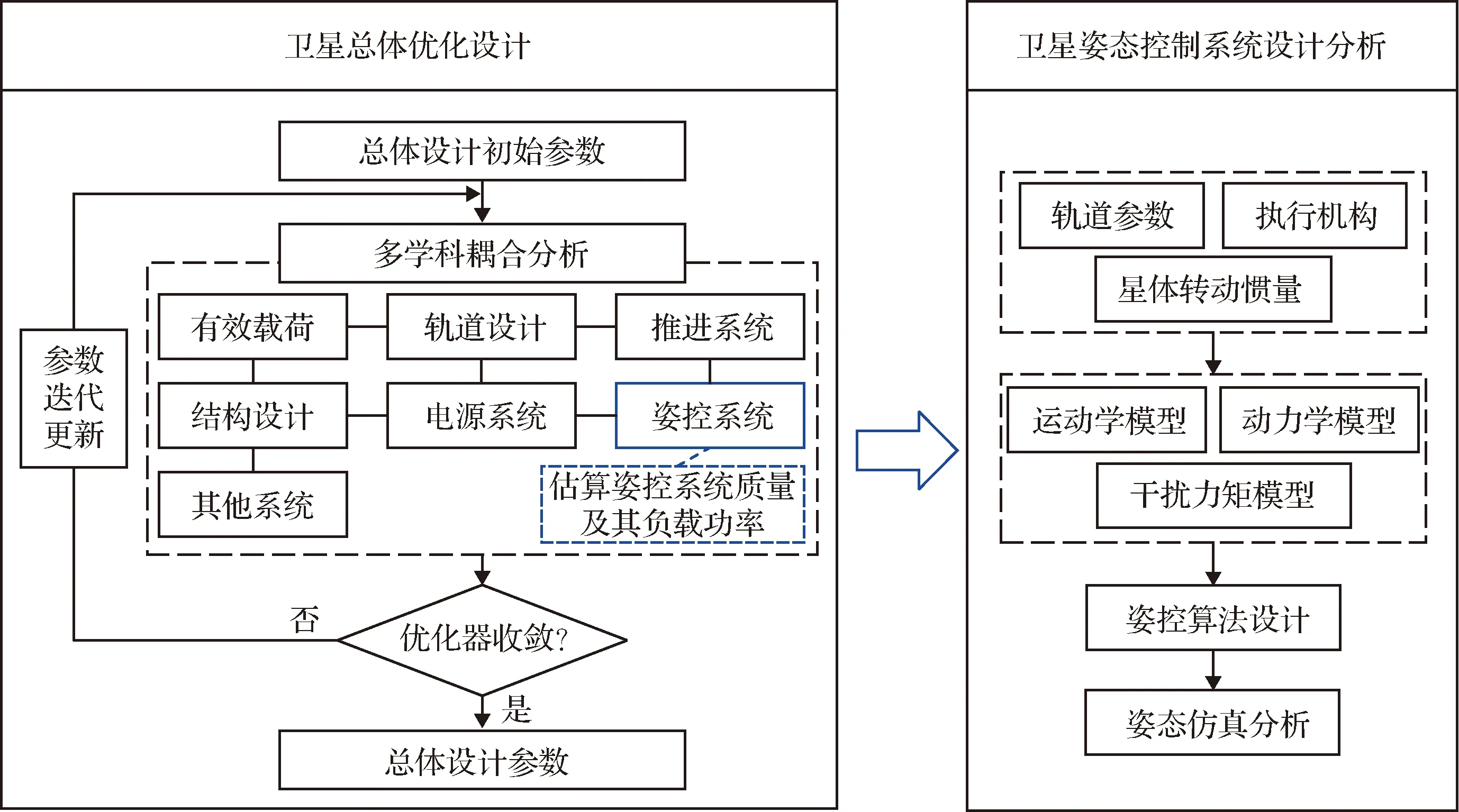
图1 卫星总体与姿态控制的串行设计流程Fig.1 The sequential design flowchart for satellite overall system and attitude control
鉴于卫星总体方案与控制系统设计强耦合、强约束的关系,本文重点面向具有复杂在轨任务要求的卫星总体参数设计问题,开展了耦合卫星姿态控制过程的卫星总体多学科设计优化方法研究。卫星总体设计方案中的轨道参数、星体转动惯量、执行机构能力等将直接影响卫星姿态动力学系统,从而影响卫星姿态控制与机动过程。通过对卫星姿态机动过程进行详细分析与评估,探究姿态控制对卫星总体方案参数设计的影响。进一步,通过结合面向应用阶段在轨任务的卫星姿态控制过程,开展卫星总体参数与控制过程的一体化优化设计研究,重点解决传统总体与控制相对独立设计带来的迭代低效、性能局限和方案冗余等问题。
基于上述思路,本文提出了一种卫星总体与姿态控制一体化优化设计方法,其框架如图2所示。通过将卫星姿态控制仿真过程嵌入到卫星总体多学科设计优化迭代中,实时根据当前卫星总体设计参数进行姿态控制算法设计并进行姿态机动性能评估,从而反馈指导总体设计参数更新,最大限度消除卫星姿态控制分系统设计和卫星总体设计之间的界限,实现卫星总体参数与姿控系统的综合最优设计。
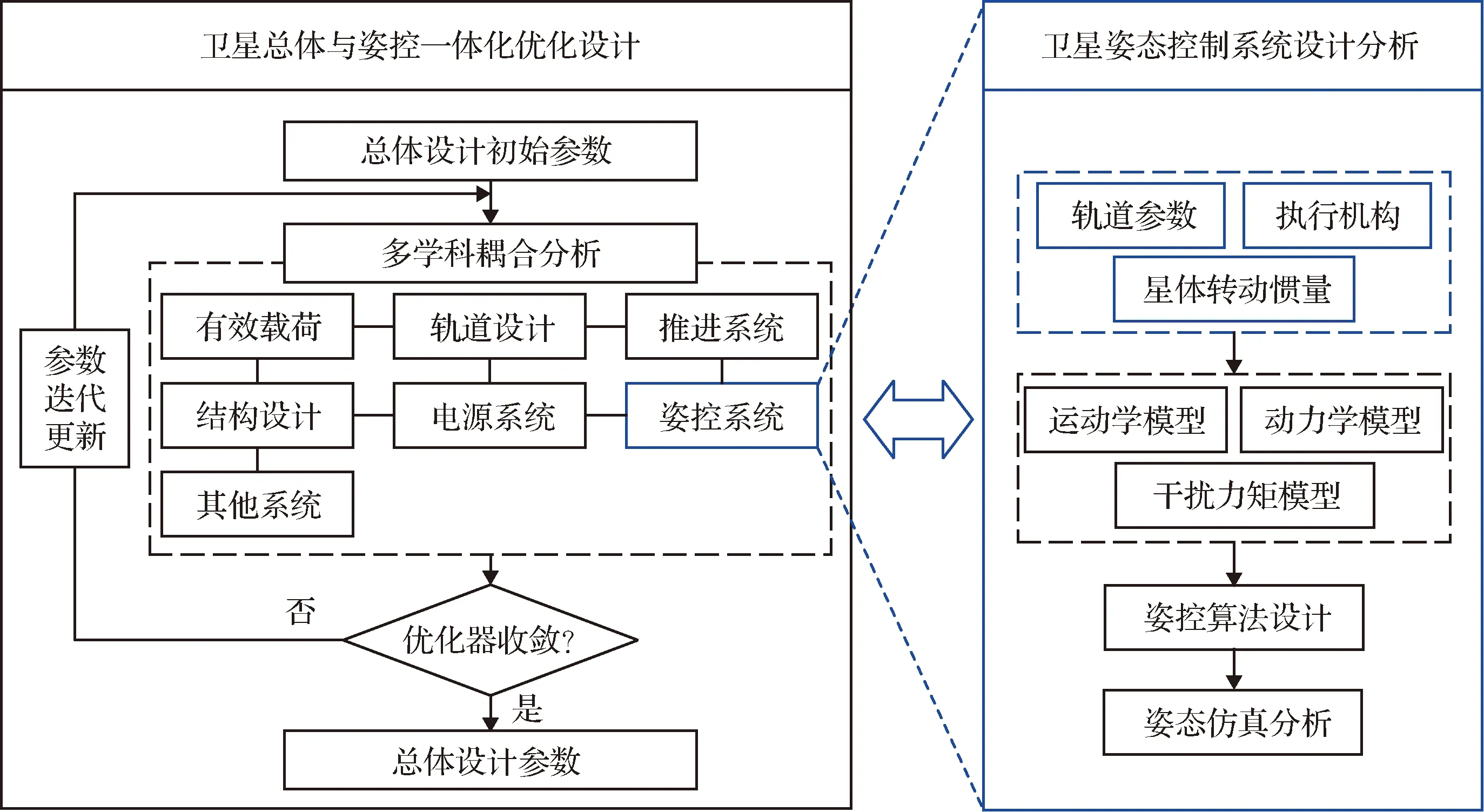
图2 卫星总体与姿态控制一体化优化设计框架Fig.2 The integrated optimization design flowchart for satellite overall system and attitude control
2 卫星总体与姿态控制一体化设计学科模型
以某对地观测敏捷卫星为例,选取合成孔径雷达为有效载荷,具有全天候对地观测能力,对总体设计学科模型进行建模。
2.1 轨道模型
轨道为太阳同步回归圆轨道。选取轨道高度h为设计变量,轨道偏心率为0,降交点地方时(DNT)为上午10时0分左右,轨道倾角可以根据太阳同步回归轨道设计方法进行计算,公式如下:
(1)
式中:i为轨道倾角;Re为地球赤道半径;n为轨道平均角速度;J2=0.001 082为地球主要的引力摄动项。
根据轨道高度h,可计算轨道周期TN为
(2)
参考轨道的受晒情况由星蚀因子ke表示。对于圆轨道,参考轨道的星蚀因子计算公式为
(3)
2.2 结构分系统模型
假设卫星主体构型为长方体,垂直于发射方向的横截面为正方形。星体结构尺寸的边长为b,高度为l,结构壁厚为t。结构材料采用铝合金5A06[12],材料密度ρ=2.64 g/cm3,则结构质量Mstr、卫星体积Vsat以及星体转动惯量(Ix,str,Iy,str,Iz,str)的估算公式如下
(4)
式中:Msat为卫星总质量;Msp为太阳能帆板质量。
假设太阳能帆板为正方形,采用双翼式安装方式,距离星体侧面的安装距离和星体结构尺寸边长相同,则太阳能帆板部分的转动惯量(Ix,sp,Iy,sp,Iz,sp)为
(5)
式中:Asp表示太阳能帆板面积。
记卫星的转动惯量矩阵Ixyz为diag(Ix,Iy,Iz),其值为星体转动惯量和太阳能帆板转动惯量之和。卫星的横截面积Af,即其迎风面积,取卫星本体的最大截面积与太阳能帆板面积之和,即
(6)
卫星结构必须有足够的强度、刚度和稳定性,以承受运载火箭的发射环境。因此结构分系统设计还需要根据运载火箭的频率与过载特性进行强度、刚度和稳定性设计,使得结构壁厚t达到设计要求的临界壁厚,具体计算公式见文献[13]。
2.3 电源分系统模型
电源分系统主要包括太阳能电池阵、蓄电池以及电源控制器等。本文将太阳能帆板面积Asp和卫星设计寿命Tlife作为电源分系统的设计变量,估算电源分系统质量Meps、太阳能帆板质量Msp和蓄电池质量Mba。进一步,假设卫星所有供电均直接由蓄电池提供,根据卫星长期负载功率和姿态机动峰值功率两部分需求,评估当前设计情形下电源系统所允许的姿态机动性能。
寿命末期单位面积太阳能电池阵的输出功率PEOL为
PEOL=ηspFsIdcosθ(1-dy)Tlife
(7)
式中:ηsp为太阳能电池阵的能量转换效率,选用GaInP2/InGaAs/Ge太阳电池片,取其值为30%[14];Fs为太阳照射强度,为1367 W/m2;Id为太阳电池阵布片系数,取值为0.77;θ为太阳入射角,考虑最坏情形取为23.5°;dy表示太阳能电池阵输出功率年下降率,取为2%。
太阳能帆板质量为
Msp=Pspρsp=PEOLAspρsp
(8)
式中:ρsp为太阳能帆板比能量。
按照一个轨道周期进行计算,太阳能电池阵产生的总电能为
Etotal=ηspPEOLAsp(1-ke)TN
(9)
根据能量平衡原则,可以计算出蓄电池的质量为
(10)
式中:ρba为蓄电池比能量;ηba为蓄电池能量转换效率;dDOD为蓄电池平均充放电深度,选用锂离子蓄电池,其值取为20%。
(11)
进行电源分系统设计时要求该时间大于0,且小于一个轨道周期。
2.4 推进分系统模型
推进分系统主要根据速度增量需求来估算推进剂质量Mfuel和推进分系统质量Mps。卫星的速度增量主要包括轨道高度维持和卫星报废离轨两部分,具体计算公式详见文献[15]。
2.5 姿态确定与控制分系统模型
假设姿态确定与控制(ADC)分系统采用零动量稳定方式,采用反作用飞轮作为执行机构进行卫星姿态的三轴稳定控制与机动,选择磁力矩器进行饱和飞轮的卸载与控制。
传统卫星总体设计中姿态确定与控制分系统设计主要根据轨道高度、迎风面积、卫星转动惯量和太阳电池阵质量等来计算卫星在轨运行过程中受到的各种环境干扰力矩,而后确定飞轮的角动量容量,然后根据经验公式对分系统的质量Madc和功率Padc进行粗略估算[16]。需要注意的是,该种估算方式仅考虑了卫星为了克服干扰力矩进行对地定向的三轴姿态稳定功能,而并未考虑卫星姿态机动任务要求,从而无法实现对卫星姿态机动仿真过程的能量消耗进行准确评估。因此,对于空间姿态机动能力要求较高的敏捷卫星设计而言,卫星在轨应用任务复杂,传统卫星参数设计中粗糙的学科分析过程则无法满足卫星精细化的总体设计要求。
为了能够准确评估卫星姿态机动任务所消耗的能量,需要将姿态控制仿真分析过程嵌入到卫星总体参数优化设计中。根据卫星总体设计参数实时更新轨道高度和卫星转动惯量等,进而更新卫星姿态动力学模型,通过设计合适的姿态控制算法,实现对卫星姿态的机动控制,从而得到反作用飞轮的转速与控制力矩的变化过程。通过近似构建飞轮电流和飞轮转速、输出力矩之间的关系表达式,则可以得出飞轮电流和功率的实时变化过程,进而对整个姿态机动任务中飞轮的电量消耗进行较为准确的评估。
首先在轨道坐标系中建立安装有反作用飞轮的卫星姿态动力系统;考虑到卫星在轨运行环境复杂,姿态会受到非线性时变干扰力矩的影响,因此选择设计稳定鲁棒的滑模控制器,使卫星跟踪期望的姿态信号,进一步通过使用连续的双曲正切函数避免滑模控制中的抖振现象;最后构建反作用飞轮的动力学模型,计算姿态机动任务电量消耗。
(1)卫星姿态动力学系统

(12)

(13)
式中:Jx,Jy,Jz分别表示三个坐标轴方向上反作用飞轮的转动惯量;Ωx,Ωy,Ωz表示飞轮相对于星体的角速度。
(2)滑模控制器设计

(14)
针对上述误差系统,选取一种线性滑模面s=k1e1+e2,从而设计出姿态跟踪滑模控制器为
k3tanh(s/ε))
(15)
式中:k1,k2,ε均为正常数;k3为正常数且满足条件k3>||d||。最终,在控制器(15)的作用下卫星可以实现对卫星期望姿态的跟踪任务。
(3)执行机构动力学模型
以反作用飞轮为例,其电流I与其转速ω和输出力矩τ之间的关系可近似建模[17]为
I=(a0ω+b0τ)2+I0
(16)
式中:a0和b0为模型系数。当飞轮的转速和输出力矩均为零时,飞轮存在一个基准常值电流I0。假设飞轮的输入电压始终固定为U=28 V。
(17)
通过准确仿真不同卫星总体参数条件下的姿态机动过程就可以得到不同卫星设计下较为准确的能量消耗,从而指导卫星电源分系统设计,进而影响最终卫星总体设计方案。
2.6 其他分系统模型
有效载荷分系统的质量Mpl和功耗Ppl取为固定值,分别为30 kg和30 W。
数管分系统质量Mdh一般占卫星干重的5%,功率Pdh为卫星长期负载功率的5%。
测控分系统质量Mttc一般占卫星干重的5%,功率Pttc为卫星长期负载功率的5%。
热控分系统质量Mtm一般占卫星干重的5%,功率Ptm为卫星长期负载功率的5%。
3 卫星总体与姿态控制一体化优化模型
3.1 一体化优化设计模型
根据上述建立的卫星总体与姿态控制一体化设计学科模型,梳理各学科之间的耦合关系,得到其总体设计结构矩阵如图3所示。由图可知,轨道和卫星结构通过轨道角速度、卫星横截面积和卫星转动惯量等状态变量直接影响卫星姿态动力学系统,从而影响卫星姿态控制仿真分析结果。进一步,卫星姿控分系统设计和推进、电源分系统也存在耦合作用,从而影响卫星总体设计。

图3 卫星总体设计结构矩阵Fig.3 The satellite overall design structure matrix
卫星总体与姿态控制一体化优化模型共包括5个设计变量,分别是轨道高度h、星体结构边长b、星体结构高度l、太阳能帆板面积Asp和设计寿命Tlife。
卫星总体设计约束主要包括:(1)星蚀因子满足ke≤0.35;(2)卫星容积满足Vsat≥0.5 m3;(3)结构可靠性因子满足Fstr≥1。此外,在本文研究的总体与姿态控制一体化优化设计问题中,由电源分系统设计要求可知,仍需满足0≤tadc≤TN,即允许敏捷卫星进行持续姿态机动的时间大于零,且小于一个轨道周期。
卫星概念设计的优化目标包括两个部分。考虑到卫星质量与卫星成本直接正相关,因此期望卫星设计质量Msat越小越好。同时对敏捷卫星而言,要求其姿态机动能力越大越好,即允许敏捷卫星进行持续姿态机动的时间tadc越长越好。当在卫星总体设计中耦合考虑卫星姿态控制仿真分析过程时,允许卫星进行持续姿态机动的时间根据式(17)进行较为准确的估算,即
(18)
综合以上,卫星总体与姿态控制一体化优化模型可以表述为
(19)
式中:F(X)为一体化设计的综合优化目标。卫星设计质量Msat越小,允许卫星进行姿态机动时间tadc越长,优化目标F越小。
3.2 模型优化求解方法
据上述分析可知,优化模型(19)是一个耦合卫星姿态控制过程仿真的多学科设计优化问题。常见的多学科设计优化求解策略包括多学科可行法(MDF)[18]、单学科可行法(IDF)[19]、协同优化(CO)[20]、并行子空间优化(CSSO)[21]、解析目标分流(ATC)[22]等。考虑到该问题复杂的多学科耦合特性,采用基于多学科分析的MDF方法对该问题进行优化求解。
MDF方法的内层循环为多学科分析迭代过程,外层循环为总体设计的参数优化迭代过程。在内层循环中,当前后两次迭代中耦合变量的变化量小于给定的误差范围时,认为多学科分析过程收敛,满足了相容性约束。本文选取卫星总质量与功率变化量作为判定多学科分析的收敛依据。在外层循环中,采用序列二次规划算法(SQP)对卫星总体设计参数进行梯度寻优。
4 算例分析
4.1 算例参数设置
在姿态确定与控制系统设计中,假设飞轮的转动惯量为2×10-3kg·m2,最大转速为每分钟6 000转,最大输出力矩为60 mN·m。当转速为零和最大转速时,飞轮的常值功耗分别为1.2 W和5.5 W。当飞轮处于最大加速或减速条件下,其峰值功耗为45 W。飞轮输入电压U始终稳定在28 V。因此,可以计算出飞轮电流模型未知参数如表1所示。据此模型则可以实时准确评估飞轮耗电功率。
表1 飞轮电流模型系数Table 1 Current model parameters of the reaction wheel
在对地观测敏捷卫星总体设计时,要求卫星可以沿滚转、俯仰、偏航三轴进行快速机动,以实现对地面任意区域的扫描成像。本文假定典型的卫星姿态机动场景为进行±45°的周期侧摆扫描,侧摆周期Troll为160 s,以此姿态跟踪任务为目标开展姿态控制算法设计并进行姿控仿真分析。
仿真中,设置卫星的初始姿态角为x1(0)=[π/4,0.01, -0.02]Trad,初始姿态角速度为x2(0)=[0, 0, 0]Trad/s,期望姿态角信号为x1d=[π/4cos(πt/8), 0, 0]Trad。滑模控制器(15)中的控制参数选择为k1=0.8,k2=0.01,k3=0.03,ε=0.005。考虑到卫星在轨飞行过程中还存在一定的外部干扰力矩,故在仿真中假设卫星受到的外部干扰力矩为
d=10-6×

(20)

4.2 优化结果分析
图4中给出了卫星总体与姿控一体化优化与传统卫星总体设计优化的迭代收敛曲线图。在计算目标函数时,允许的持续机动时间单位为分钟。由于给定的初始设计方案不满足设计约束,因此在优化初期算法主要朝着设计可行域进行搜索,造成了优化目标的收敛曲线先上升后下降,最终设计结果均满足设计约束要求。可以看出,一体化优化设计结果优于传统卫星总体设计结果,最优目标函数值为-1.33,相比于传统卫星总体设计的目标函数-1.15,整体性能提升了约15.65%。
图4 一体化优化与传统方法[16]的目标函数迭代结果Fig.4 The iterative history of the objective function for the integrated optimization and the traditional optimization methods[16]
表2对比了一体化优化和传统方法的卫星总体设计结果及其性能。可以看出,二者在卫星姿态持续机动时间指标上几乎相同。但相较于传统方法,一体化优化方法的卫星设计质量下降了约13.75%,可大幅节约卫星发射成本,体现了卫星总体与姿态控制一体化优化设计方法的优越性。
表2中同时列出了梯度搜索的初始方案和分别采用两种方法得到的优化设计方案。可以看出,经过优化后两种方法得到的轨道高度均相同,但是结构边长、结构高度、太阳帆板面积以及设计寿命参数存在较大差异。通过卫星姿态控制仿真分析,可以更加精确地计算卫星进行姿态机动所消耗的能量,相比传统方法中直接以最坏情形进行设计,大幅压缩了设计冗余度。采用一体化优化方法得到的设计寿命由1.02年增加为2.08年,理论上相同设计质量下需要携带更多燃料,但由于卫星电源分系统质量显著减小(13.78 kg降为5.86 kg),导致多学科耦合效应下卫星需要携带的燃料质量也有所下降,最终卫星总设计质量仅需79.02 kg。卫星质量的降低导致卫星转动惯量也大幅减小,通过卫星姿态仿真计算得到的一个周期的侧摆扫描姿态机动任务所消耗电量仅为0.22 W·h,相比于传统方法的粗略估算降低约92%,因此设计冗余度更低,最终所需太阳帆板面积由1.78 m2减小为0.77 m2。未来可进一步针对卫星平台开展结构拓扑优化,实现卫星平台的轻量化设计,提高卫星载荷比重。
轨道高度越高,卫星运行周期越长,可持续姿态跟踪的时间范围越大。优化结果表明,最终轨道高度均取到了设计变量的上限,且允许机动时间tadc和轨道周期保持一致。当以卫星总体质量为唯一优化目标开展总体设计时,优化后的轨道高度为843.5 km,卫星质量为77.75 kg。由此可知,即使增大轨道高度会增加卫星质量,但增加允许姿态机动时间可使得当前综合优化目标f降幅更大。本文所建模型仅考虑了轨道高度对低轨卫星携带推进剂质量和姿态动力学模型的影响。但需要指出的是,轨道高度的取值有时还依赖于卫星载荷的观测性能要求。因此,设计师可根据具体任务设计要求建立合适的优化模型。

表2 一体化优化与传统方法的设计结果比较Table 2 Comparison of design results between the integrated optimization and the traditional optimization methods
结合给定飞轮参数和设计的轨道高度,基于两种方法得到的卫星转动惯量开展卫星姿态控制仿真验证,计算得出机动过程中三个主轴方向上飞轮的最大输出力矩和最大转速结果如表2所示。可以看出,为了实现侧摆扫描机动,采用传统方法设计的卫星系统所需飞轮最大输出控制力矩接近0.04 N·m,而一体化优化方法仅需约0.02 N·m。同时,姿态机动过程中飞轮的最大转速也由约436.87 rad/s减小为249.28 rad/s,远小于飞轮的饱和转速628 rad/s。因此,采用一体化优化设计的卫星控制冗余度更大,相同任务条件下姿态机动能力更强。
图5展示了采用一体化优化方法得到的卫星真实姿态角和期望姿态角变化过程。可以看出,在设计的滑模控制器作用下,卫星的姿态角能够稳定地跟踪上期望姿态信号,成功实现了±45°的周期侧摆机动任务。
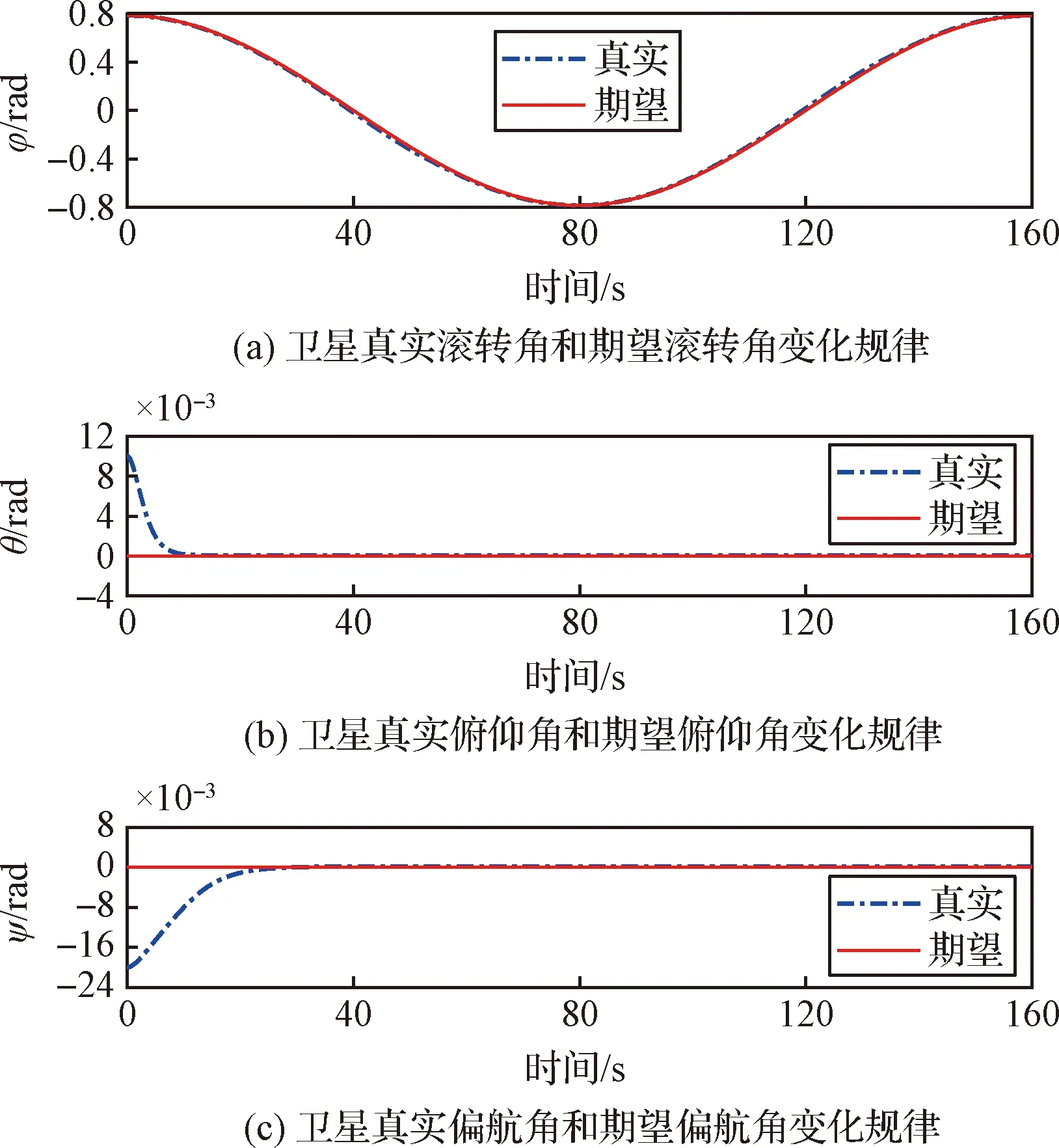
图5 卫星真实姿态角和期望姿态角仿真结果Fig.5 Simulation results of the actual and desired satellite attitude angles
反作用飞轮作为执行机构,其控制力矩变化过程如图6所示。可以看出,在滚转角方向上,飞轮输出的控制力矩最大,且最大值未超过飞轮的最大输出力矩。图7给出了飞轮转速仿真结果,可以看出滚转轴方向的飞轮转速呈正弦变化规律,符合卫星系统的角动量守恒定律。
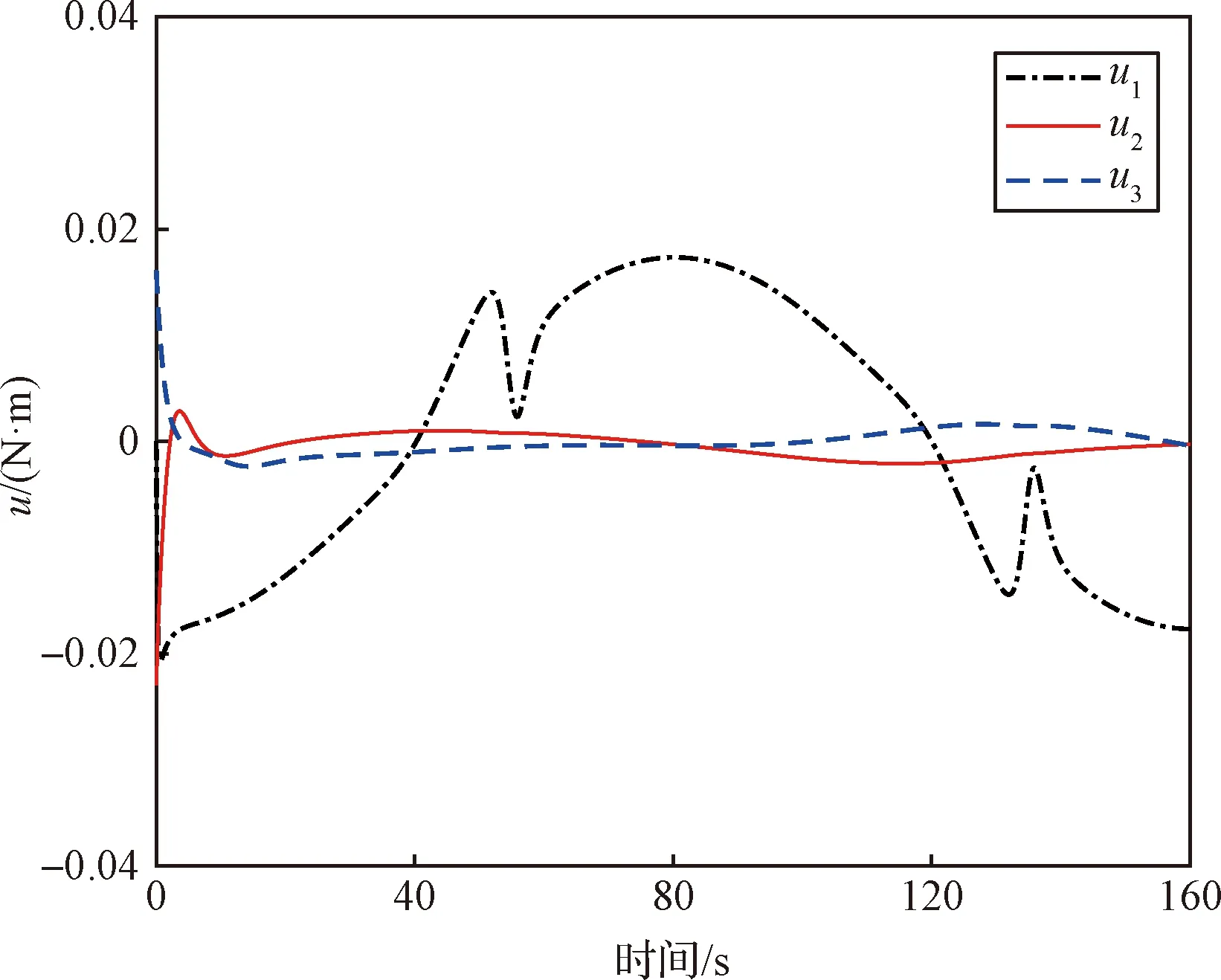
图6 飞轮控制力矩仿真结果Fig.6 Simulation results of the control torques of reaction wheels

图7 飞轮转速仿真结果Fig.7 Simulation results of the rotation speed of reaction wheels
5 结 论
本文面向具有复杂在轨姿态控制任务的卫星总体参数设计问题,开展了卫星总体与姿态控制一体化优化设计方法、学科模型构建与算例验证研究,较好解决了传统卫星总体与控制相对独立设计导致的迭代长周期、性能受局限和设计高冗余问题。相比传统方法中直接以最坏情形进行设计,采用一体化设计方法可大幅压缩设计冗余度,降低卫星总体质量。算例结果表明,卫星姿态控制过程是和卫星结构设计紧密关联、相互耦合的,且对最终卫星总体设计结果具有较大影响。将卫星姿态控制分系统详细设计纳入卫星总体设计过程开展一体化优化设计具有十分重要的意义。
本文对该问题仅进行了初步探讨,比如姿态控制算法选择了简单易用的滑模控制器,今后可进一步结合能量最优控制技术开展卫星总体与控制一体化优化设计研究。未来随着智能技术的快速发展,卫星“体”与控制“脑”将高度融合,形成智慧整体,具备智能感知、认知控制、持续学习、动态演进等能力,卫星总体与控制一体化更是卫星智能化发展的必然趋势。