车窗防夹电机电流纹波降噪检测算法仿真分析
2023-05-19张艳钟毅刘辉
张艳、钟毅、刘辉
(上汽通用五菱汽车股份有限公司,柳州 545007;2 .武汉理工大学,武汉 430070)
0 引言
汽车良好的驾乘体验包括安全性、舒适性等多方位的要求[1]。目前市售车型的电动车窗在正常工作过程中的最大推力可达500 N,车窗在如此大的推力下若不带有防夹功能,对于儿童而言更易发生误操作导致的窒息等危险。
目前市场主流防夹方法主要依靠霍尔传感器实现,但需要额外安装霍尔传感器用于检测车窗电机运动状态,并且每个车门需要独立的防夹控制器模块。李超提出了电机电流和纹波相结合的防夹策略,基于电流纹波的防夹控制器能够实现多个车窗的防夹功能的集中控制,成本更低、集成度更高[2]。然而车窗电机换向过程中产生的纹波包含大量干扰噪声,无法直接使用。
综合上述问题,本文主要研究车窗电机电流纹波信号去噪算法,提出了基于改进小波阈值去噪和麻雀搜索算法优化变分模态分解的联合去噪算法,有效提取纹波信号作为车窗防夹的判断依据并保留细节特征。
1 基于车窗防夹的改进小波阈值去噪算法分析
对直流电机运动过程进行分析以研究防夹工作原理,提出一种以样本熵为参数的改进小波阈值去噪算法。
1.1 车窗直流电机的防夹分析
机电机脉动频率的计算公式如公式(1)所示。
式中:f为纹波频率,p为电机极对数,n为电机转速,k为换向器数,c为奇偶系数。
p、k、c可视为固定参数,则电流脉动频率正比于电机转速。根据电流脉冲个数可计算出车窗的运动距离,这是纹波防夹方案的理论基础。
车窗防夹功能关键在于判断车窗位置以及车窗是否发生加持。根据上述分析,电机转速与电流纹波频率成正相关,因此纹波信号可以进行防夹判别。但纹波信号幅值相对直流分量较小,且存在大量噪声,易受外界环境干扰,需要对原始纹波信号进行去噪处理才能使用。
1.2 小波阈值去噪原理与影响因素分析
实际工程中采集到的信号一般包含白噪声,并且存在很多突变或者尖刺。利用Mallat 算法对其进行小波变换之后呈现不同的特性:真实信号的小波系数模值比较大,噪声或者突变的小波系数模值比较小。因此小波阈值去噪的主要思想是,对Mallat 分解后每一分解尺度细节分量中的小波系数做处理。在这一过程中,目前比较常用的是Donoho 提出的阈值法,其中影响小波阈值去噪效果的因素包括:小波基、分解层数、阈值以及阈值函数等。
一般认为,选取的小波基在时域上与实际采集信号越相似,处理效果越好。分解层数一般取决于对最低频率区间的要求,Mallat 算法分解最后得到一个近似分量和分解层数个细节分量。选择合适的阈值,对大于阈值的系数视为真实信号保留,对小于阈值的系数视为噪声。确定阈值之后选择合适的阈值函数,经典的阈值处理函数如公式(2)硬阈值函数和公式(3)软阈值函数所示。
设置阈值λ为0.5,绘制软硬阈值函数如图1所示。
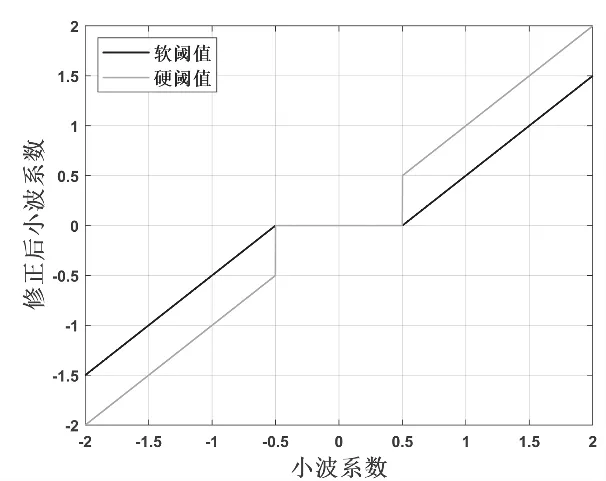
图1 阈值λ=0.5 软硬阈值函数
根据图1可知,硬阈值函数在阈值λ 处跳变,导致重构后的信号中存在额外振荡,信号平滑度下降。而软阈值函数处理后的小波系数恒小于原系数,这与小波系数大于阈值时视为有效信号的原则相违背,也使重构后的信号易丢失细节信息、重构误差较大。
1.3 基于样本熵的改进小波阈值去噪算法分析
本文在阈值函数中引入样本熵,提出了一种改进的小波阈值去噪方法(Improved Wavelet Threshold,IWT)。得到如公式(4)所示阈值函数。其中α表示每一尺度下细节分量小波系数的归一化样本熵。
对于改进的小波阈值函数分析可得:大于阈值λ 的部分采用硬阈值处理。在小于阈值λ 的部分:当所求小波系数样本熵较大时,信号包含噪声较多,利用指数函数阈值内侧小波系数迅速收缩,以保证噪声的滤除;反之,信号噪声较小,阈值函数收缩变缓,以最大程度保留信号。基于样本熵改进的小波阈值去噪算法如图2所示。
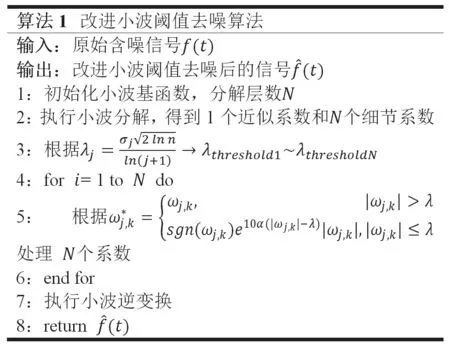
图2 改进小波阈值去噪算法
2 基于车窗防夹的优化变分模态分解和改进小波阈值联合去噪算法分析
Dragomiretskiy[3]提出了变分模态分解(Variational Mode Decomposition,VMD)。考虑到VMD 分解复杂信号的性能和麻雀搜索算法搜寻优化问题最优解的特性,使用麻雀搜索算法优化变分模态分解。
2.1 变分模态分解算法原理分析
变分模态分解处理信号的过程中,将一个实值输入信号f(t)分解为一系列子信号,即本征模态函数(Intrinsic Mode Function,IMF)。这些IMF 在保证能够重构信号的同时拥有一定的稀疏性特征,并且每个IMF 紧密围绕着各自的一个中心频率。VMD 的中心思想是构造一个变分模型,通过寻找变分问题的最优解以实现输入信号的分解。变分模态分解算法如图3所示。
2.2 麻雀搜索算法优化变分模态分解算法分析
VMD 需要人为设定模态个数和惩罚因子,无法自适应分解,因此本文考虑引入麻雀搜索算法(Sparrow Search Algorithm,SSA)。SSA 是2020年提出的群优化方法[4],具有较强的寻优能力,在收敛速度和收敛精度上表现较好,在迭代初期就能够迅速向全局最优值移动,并且具有一定跳出局部最优解的能力。因此,本文将该搜索算法应用于变分模态分解的参数确定过程中,选取样本熵作为适应度函数,将麻雀搜索算法应用于VMD 分解,即SSA-VMD,以实现自适应分解。
麻雀搜索算法的主要流程为,首先假设麻雀种群中有n 只麻雀,需要解决一个包含d 维变量的优化问题。按照公式(5)求适应度值。
其次,发现者按照公式(6)进行位置更新。
式中:t为当前迭代次数,j为变量维数,α∈(0,1.0],imax为最大迭代次数,Q为一个正态分布随机数。R2 ∈[0,1.0]为预警值,ST∈[0.5,1.0]为安全值。
接着,对于加入者,按照公式(7)执行位置更新。
最后,由于设置了侦查预警机制,按照公式(8)进行位置更新。
式中:β为随机数,K ∈[-1.0,1.0],ε为极小常数,fi为当前麻雀的适应度值,fg为当前全局最佳适应度值,fw为当前全局最差适应度值[5]。
2.3 基于SSA-VMD 和IWT 的联合去噪算法原理分析
结合改进的小波阈值去噪算法,对分解得到的模态分量设定规则:当相关系数r<0.2 时,利用改进小波阈值去噪算法处理;当相关系数r≥0.2 时,保留分解得到的IMF;利用去噪后模态分量和有效分量重构信号。将该处理过程总结为麻雀搜索算法优化变分模态分解和改进小波阈值联合去噪算法(SSA-VMD-IWT),如图4所示。

图4 SSA-VMD-IWT 联合去噪算法
3 实验结果与分析
3.1 基于五菱某车型改进小波阈值去噪算法对电流纹波信号去噪测试结果
为了本测试及仿真实验是基于上汽通用五菱某车型的电动车窗升降电机,在同一工况条件的电机电流纹波信号测量采集和对比分析,用于验证小波阈值去噪算法的去噪效果。采集的信号如图5所示,由于电机固有特性及电压波动等因素,电流纹波信号尖刺明显、噪声较多。
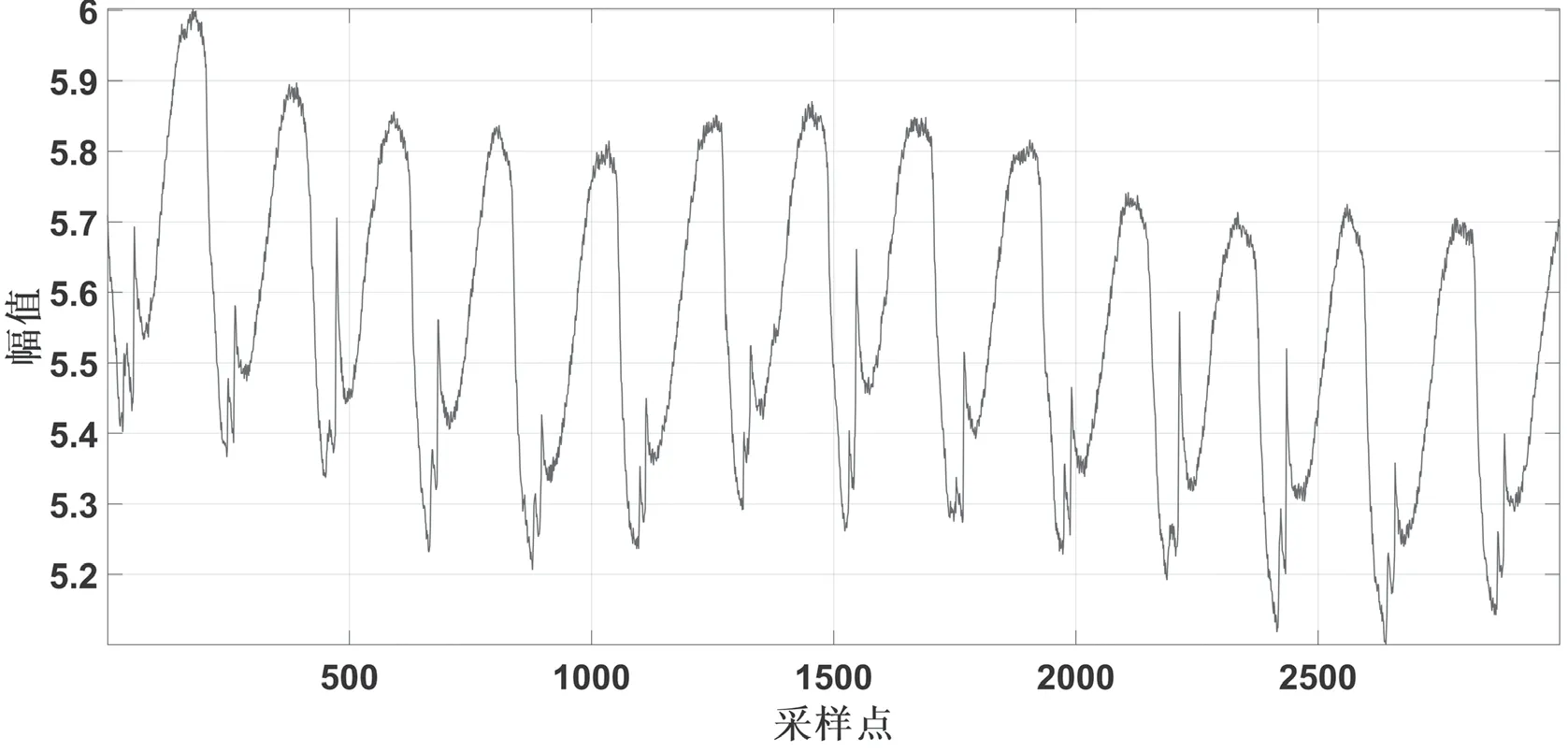
图5 直流有刷电机纹波信号
选择db3 小波进行3 层分解,选择硬阈值、软阈值,采用文献[6]提出的对比方法[6],以及本文改进阈值的方法,4 种不同阈值处理结果如图6和图7所示。
(3)定期清管。应根据管段输送的气质情况、管道的输送效率和输送压差,预测管道内黑粉沉积规律,确定合适的清管周期和工艺[9]。可暂定清管周期为1年,后期根据粉末量再调整,直到找到合适的清管周期。清管前可在黑粉易积聚位置打孔,确定黑粉积聚情况,选择合适的清管工艺。清管时应根据黑粉积聚量,循序渐进,多阶段多次清管,防止一次清出量过多,导致卡堵。同时,也要对上游伴生气输送管线开展清管作业,减少输往下游的黑粉量。
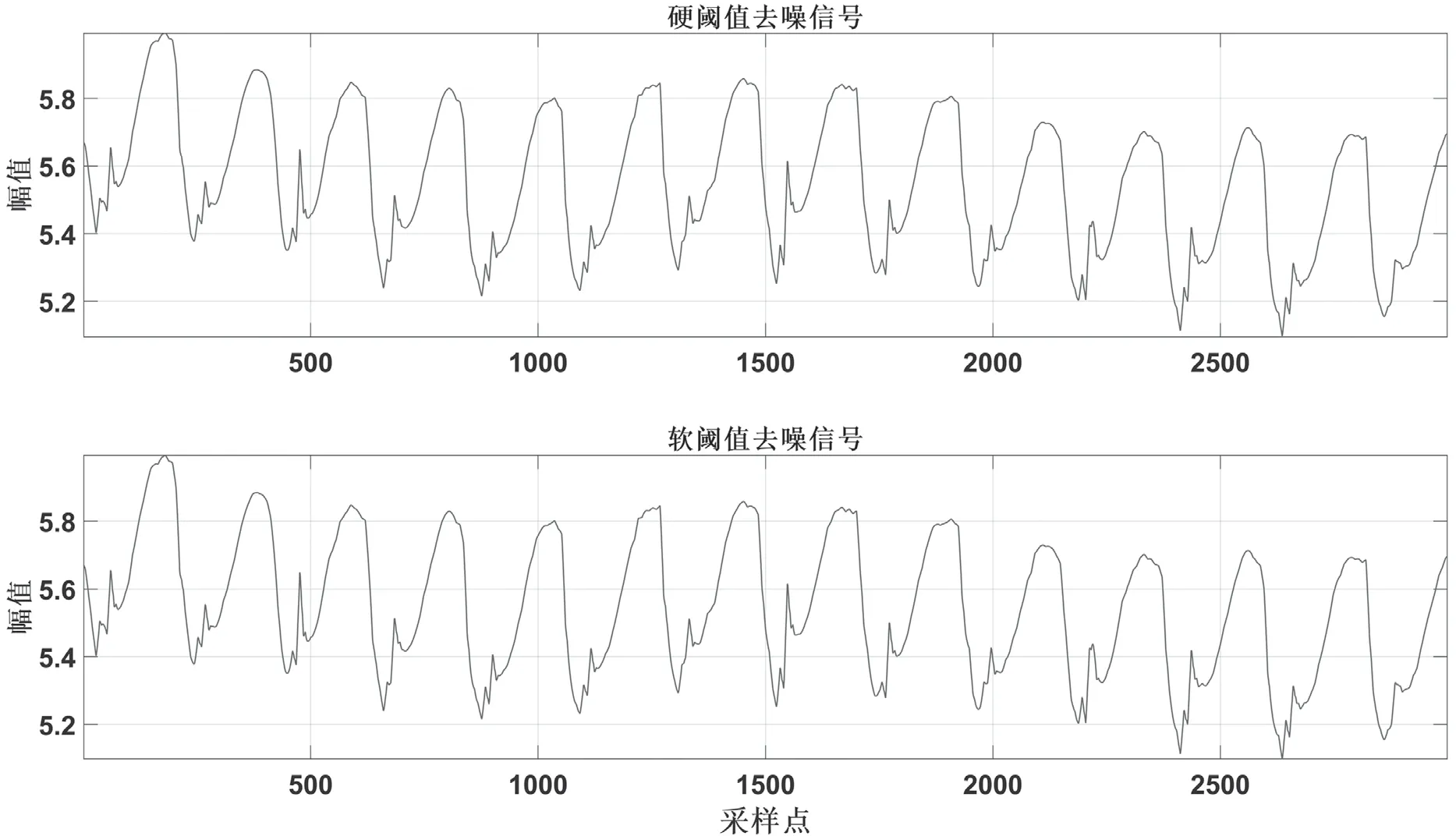
图6 软硬阈值函数去噪结果
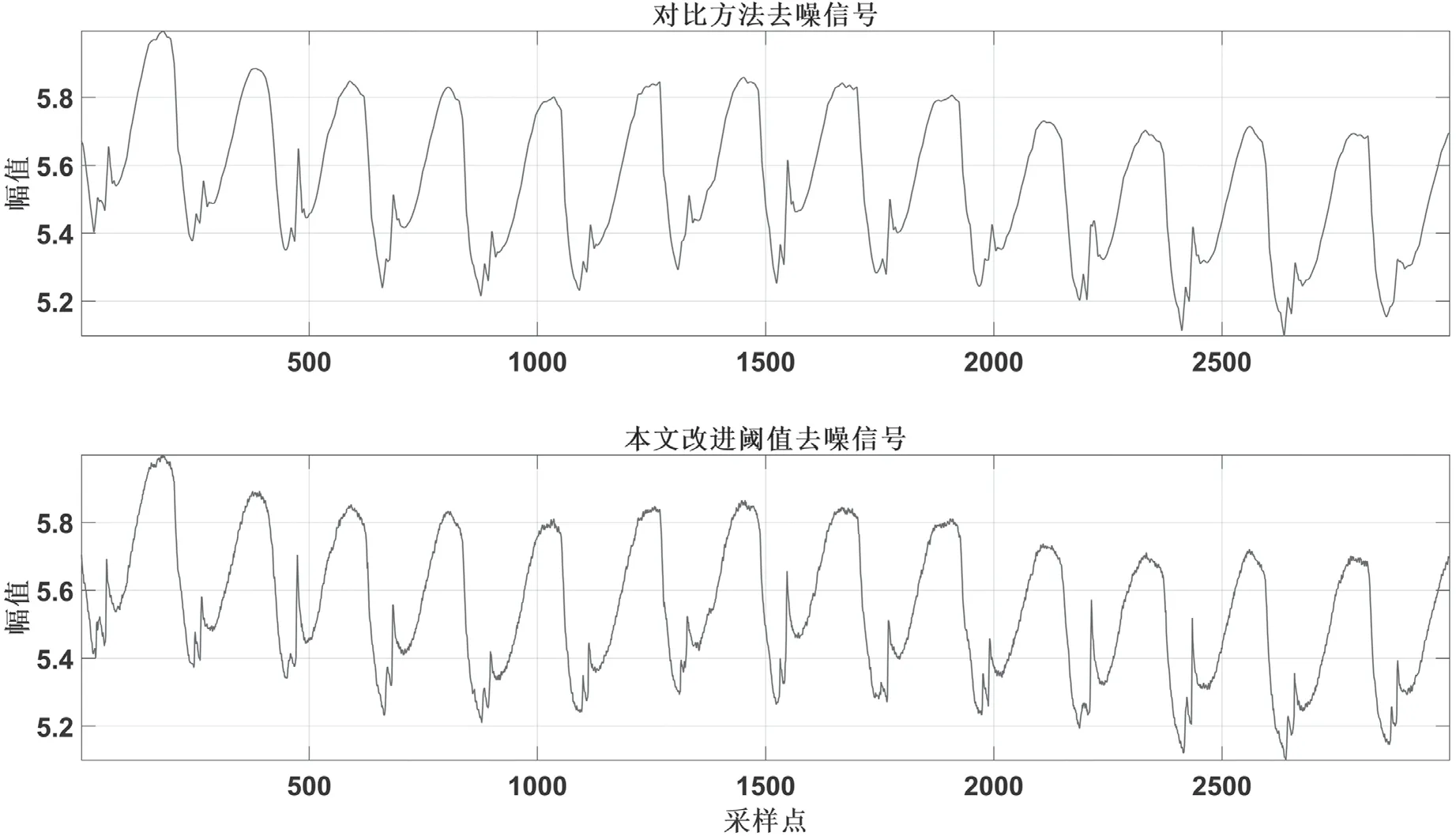
图7 对比方法与本文改进阈值函数去噪结果
通过观察4 种阈值函数对电机纹波信号的去噪结果发现,硬阈值、软阈值和对比方法阈值去噪效果相同。而使用本文提出的改进阈值函数进行去噪处理时,分层自适应阈值对于不同分解尺度的细节系数设置与其值有关的阈值,使得即使信号中包含幅值较大直流分量,也能够在去除噪声的同时保留有效信号。表现在波形上就是,去噪后信号平滑度不及其他3 种方法。
取对比方法提出的阈值去噪后信号以及本文方法去噪后信号,分别计算其与原始信号的差值,该差值即表示被去除的噪声。计算结果如图8所示。从图中可以看出,使用本文提出方法去除的部分,在整个采样时间内分布比较均匀;对比方法明显更多地去除了电机在换向过程中产生的尖刺,然而该行为丢失了一定的频率信息。对于2 个电机纹波信号,设置嵌入维度为2,容限取0.2倍信号标准差,计算原始信号、使用对比方法去噪后信号以及使用本文改进小波阈值去噪后信号的样本熵,结果如表1所示。
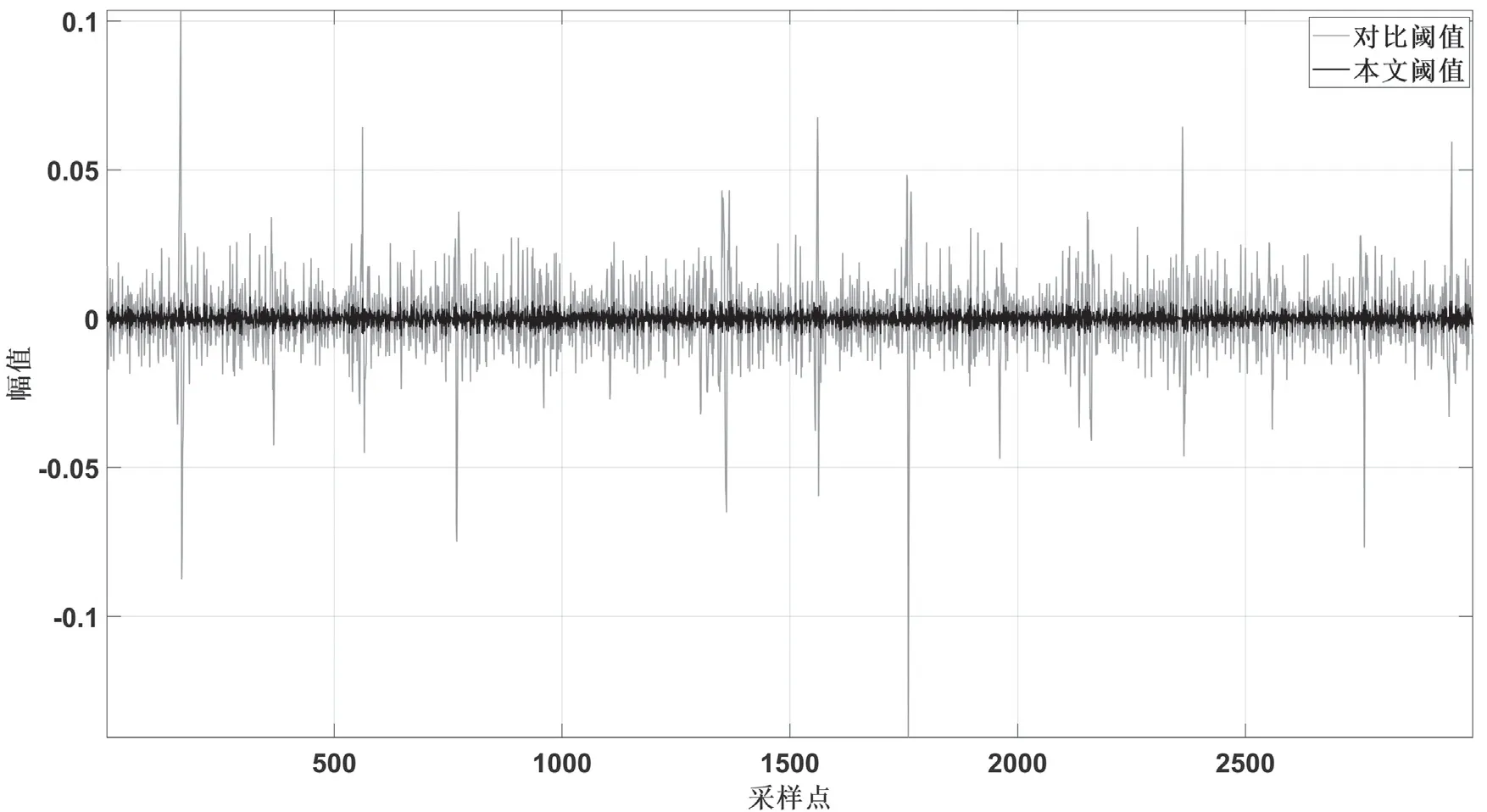
图8 被去除的噪声
由表1可知,使用2 种小波阈值去噪后的信号样本熵都明显下降,并且使用本文提出的方法去噪后,信号样本熵大于对比方法的结果。这表明本文提出的方法在去除信号噪声基础上,能够有效保留信号细节特征。

表1 2 个电机纹波信号不同方法样本熵
综合考虑噪声去除能力和信号细节保留能力,本文提出的改进小波阈值去噪算法对于信号中的噪声去除效果,优于传统方法和文献[6]提出的方法。去除的部分更接近白噪声,不会丢失原信号的细节特征。
3.2 基于五菱某车型SSA-VMD 和IWT 的联合去噪算法对电流纹波信号去噪测试结果
使用上一节采集到的信号,分别使用文献[7]中提出的VMD和SG 滤波方案[7]、文献[8] 提出的VMD 和软阈值小波去噪方案[8]以及本文提出的SSA-VMD-IWT 联合去噪方案,实验过程中统一采用SSA 寻优结果确定的参数。设定种群数量为20,最大迭代次数20 次,最终得到模态分解个数为4,惩罚因子为2 483.64。然后将这2 个参数代入VMD 分解(图9),对分解结果进行采用3 种不同方法进行去噪,得到去噪结果如图10~图12所示。
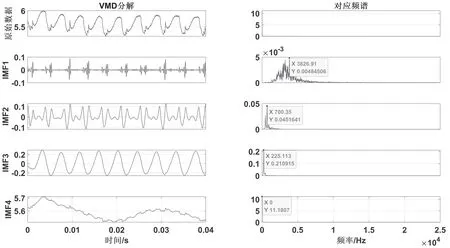
图9 VMD 分解结果与频谱
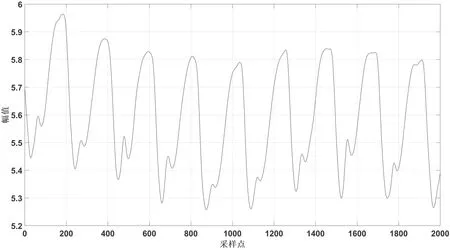
图10 VMD+SG 去噪结果
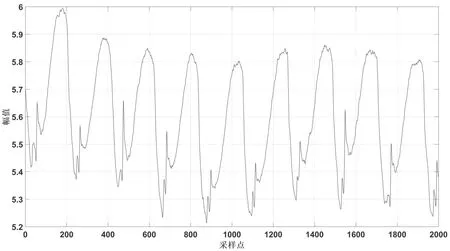
图11 VMD+SWT 去噪结果
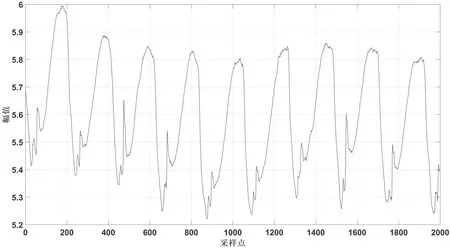
图12 VMD+IWT 去噪结果
分析不同的去噪结果可以发现,VMD+SG 去噪方案得到的结果中仍然包含直流分量,并且其波形是3 种去噪结果中信号波形最平滑的。实际电机纹波信号分解得到的4 个分量,与原信号的相关系数分别为0.0315、0.1294、0.9576 和0.4984,其中直流分量即分解结果中IMF4 与原信号的相关系数为0.4984,表明其与原信号相似程度较高,大于设计的相关系数阈值0.2。
故VMD+SG 去噪方案对IMF2、IMF3 和IMF4 进行SG 滤波处理,使得最终结果包含直流分量且波形最为平滑。而采用VMD+SWT 去噪方案和本文提出算法得到的去噪结果,均能在去噪的基础上保留纹波信号的局部特征,且本文算法得到的去噪后信号在局部表现上略好于VMD+SWT 方案。
同样,计算不同方法所得信号的样本熵如表2所示。可以看出,3 种方案所得信号样本熵与原始信号相比明显减少,其中VMD+SG 方案减小程度最大,与该方案所得信号波形最平滑的表现相符。本文提出的方案减小程度介于VMD+SG 和VMD+SWT 方案之间。进一步与3.1 小节结果对比发现,采用VMD 和小波阈值去噪结合的方式,去噪后样本熵分别降低0.020 3、0.029 0。说明对于含噪较多的纹波信号,VMD 与小波阈值联合去噪方法一定程度上能够改善改进小波阈值去噪算法对包含直流分量的信号去噪效果变差的问题。

表2 4 种去噪方法比较
4 试验结论
试验结果表明,麻雀搜索算法优化的变分模态分解和改进小波阈值联合去噪算法,能够在有效去除信号噪声的基础上,保留信号的局部特征。在实际使用中,需要根据实际使用需求选择合适的去噪算法。如果只需得到纹波信号的主要频率成分,可以直接根据VMD 分解结果选择合适的模态分量,如图9中的IMF3。若需要在去噪基础上保留更多的局部信息,则本文提出的SSAVMD-IWT 联合去噪算法能有效满足需求。
5 结束语
本文提出了基于麻雀搜索算法优化的变分模态分解和改进小波阈值联合去噪算法,在实现变分模态分解自适应分解的基础上,利用相关系数区分含噪程度,以进行改进小波阈值去噪处理。该算法在保留纹波信号细节特征的同时有效去除噪声,使去噪后的纹波信号可以用于车窗防夹系统,并设计了车窗纹波防夹测试系统的软硬件部分进行测试。但由于本文提出的算法引入群优化算法的随机性,该算法的鲁棒性、适用性还需要大量数据进行更深层次的研究。