变循环调节机构发展现状及关键技术
2023-05-13冯子轩毛建兴胡殿印
冯子轩 ,毛建兴 ,胡殿印
(1.中国航空发动机集团有限公司,北京 100097;2.北京航空航天大学航空发动机研究院,3.航空发动机结构强度北京市重点实验室,4.中小型航空发动机联合研究中心:北京 100191)
0 引言
依据《美国空军2020 年愿景》、《美国航空航天倡议》、《美国国防部空间科学与技术战略》等美国国家级政府文件,第6 代战斗机要求具备超声速巡航与作战、超常规机动、超级隐身、超远程打击、超越物理域和信息域的实时控制等能力,其动力系统要求具备超大推力与推重比、超低油耗、超隐身、超机动、长耐久(寿命)、超低费用。常规循环发动机受部件及系统限制,难以满足第6 代战斗机的跨空域、跨速域飞行能力,因而要求发动机在不同循环控制方式之间实现灵活切换,以实现更宽的工作范围和满足更多的战斗任务需求。因此,变循环发动机(Variable Cycle Engine,VCE)应运而生。在亚声速巡航时采用涡扇工作模式,在超声速巡航时采用涡喷工作模式,以拓宽发动机工作范围、保证不同飞行状态下的高效推进[1]。自20 世纪90 年代起,美国政府通过开展综合高性能涡轮发动机技术(Integrated High Performance Turbine Technology Program,IHPTET)和通用的经济可承受的先进涡轮发动机(Versatile Affordable Advanced Turbine Engines,VAATE)等研究计划,大力发展变循环发动机设计技术。
变循环发动机是指通过调整部分结构的形状、尺寸、位置,改变内外涵道流量分配,实现在不同热力循环间的连续切换,以兼顾全飞行包线内的经济性、加速性和大推力要求。调节机构是实现变循环发动机工作模式切换的执行机构,其设计技术发展伴随着变循环发动机的整个研制历程。现有变循环发动机结构方案涉及模式选择阀、前/后涵道引射器、压缩系统/涡轮系统导向器等调节机构,其中,模式选择阀通常位于风扇出口,仅存在“打开”和“关闭”2 种状态,用于确定发动机的循环模式及涵道数量;前涵道引射器通常位于低压压气机后方,可连续调节内涵与外涵之间的流量分配;后涵道引射器通常位于加力燃烧室之前,与前涵道引射器配合共同调节外涵流量;压缩系统/涡轮系统导向器位于压气机/涡轮转子叶片之前,通过角度调节实现不同工作状态下转子进口气动参数的最佳匹配。通过各调节机构的协同调节实现发动机涵道比在宽调节范围内的精准控制。基于调节机构的目标功能,其设计要求可归纳为低泄漏量、高调节精度、快速响应、稳定调节,依据调节机构具体工作方式不同而各有所侧重。
本文以变循环发动机跨代发展为主线,聚焦调节机构目标功能及结构方案演变,系统梳理了调节机构的发展历程、功能分类及设计要求。进一步针对调节机构设计过程中涉及的运动学及动力学仿真、试验中所涉及的温度/机械载荷试验室模拟及位移和变形在线监测等关键技术进行归纳,并对相关领域的技术发展需求进行总结,以期为中国变循环发动机调节机构设计与研制提供参考。
1 变循环调节机构发展历程
变循环发动机设计起始于20 世纪60 年代,至今已提出了多种变循环发动机设计方案。20世纪70年代,美国PW 公司提出了可控气流变循环方案,采用内外涵独立流路设计,对应各自的燃烧室和排气喷管,通过调节机构的截流单独控制2 股同心气流的排气温度和速度;美国国家航空航天局(National Aeronautics and Space Administration,NASA)与海军航空推进中心提出了变几何涡轮方案,采用可调低压涡轮导向器叶片角度来改变其面积来验证变几何涡轮的作用,且为了改善喘振裕度,将第1 级静子叶片也设计为可调;美国GE公司提出了双涵道变循环方案,采用多个调节机构组合调节,最终达到调节发动机涵道比的效果[2]。
20世纪90年代,英国RR公司提出了选择放气式变循环方案[3],采用低压放气阀和高压放气阀,在亚声速飞行时,低压放气阀打开,高压放气阀关闭,进入发动机的气流将在低压放气阀和核心机处分开,发动机工作在涡扇模式;而在超声速飞行时,高压放气阀打开,低压放气阀关闭,发动机工作在涡喷模式。法国SNECMA 公司提出了带中间风扇的MCV99变循环方案[3],采用设置在压气机出口处由单独涡轮带动的风扇,以辅助进气口供气,在起飞和亚声速巡航时,外涵道、辅助进气门和压气机引气门打开,风扇系统运行,发动机以涡扇模式工作;在超声速巡航时,3 个门都关闭,以涡喷模式工作。
变循环发动机调节机构研制最为成功的是美国GE 公司,自20 世纪70 年代开始相关技术积累,围绕变循环调节机构申请了大量发明专利,迄今已研制了5代变循环发动机[4]。
GE公司设计的第1代变循环发动机如图1所示。在第1代变循环发动机(YJ101)中,设计了可调面积涵道引射器(Variable Area Bypass Injector,VABI)、后涵道引射器和可调面积低压涡轮导向器,通过调节核心驱动风扇CDFS的可调导叶角度来调节核心机流量[5]。
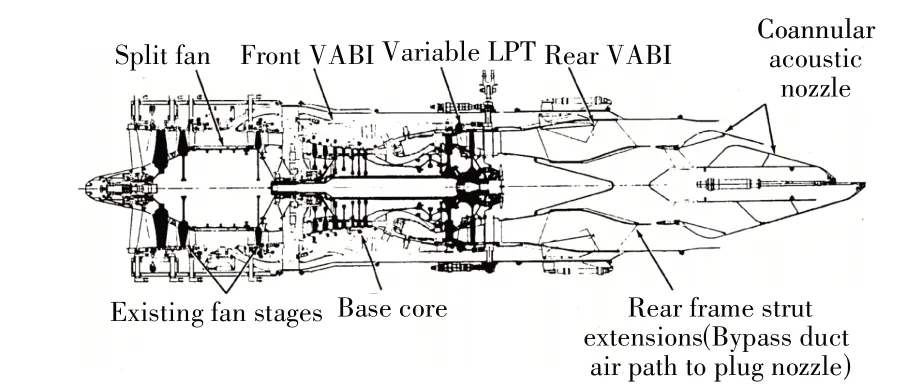
图1 GE公司设计的第1代变循环发动机
GE公司设计的第2代变循环发动机如图2所示。在第2代变循环发动机(GE21)中,采用了核心机驱动风扇技术(Core-Driving Fan Stage,CDFS),并引入前后涵道引射器、模式切换阀(Mode Selecting Valve,MSV)3 个关键调节机构,以实现涵道比的更宽范围调节,从而实现涡扇模式与涡喷模式之间的转换[6-7]。
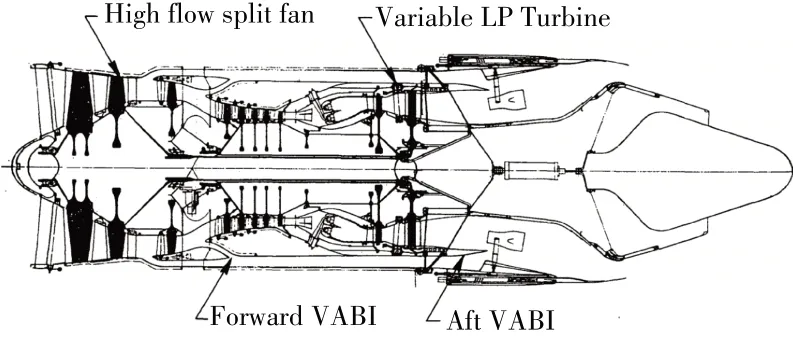
图2 GE公司设计的第2代变循环发动机
GE公司设计的第3代变循环发动机如图3所示。在第3代变循环发动机(F120)中,用1个被动旁路系统代替了模式选择阀,从而大幅减少作动机构零件数[8]。
GE 公司设计的第4 代变循环发动机(涡轮部件)如图4所示。在第4代变循环发动机中应用了可变压比技术(Controlled Pressure Ratio Engine,COPE)[9],在保持第2 代变循环发动机双涵道设计原理基础上,进一步结合在第3 代变循环发动机研制后总结得出的涡轮部件改进设想,这些涡轮部件包括高效可调面积高压涡轮导向器、高负荷跨声速高压涡轮、无导叶对转低压涡轮、可变面积喷管等。
图4 GE公司设计的第4代变循环发动机(涡轮部件)
美国GE 公司和英国RR 公司合作设计的第5 代变循环发动机(F136)如图5 所示。在第5 代变循环发动机的研制中提出了自适应发动机概念,在可控压比技术基础上,采用具有独立可调导叶的叶尖风扇(Fan-on-Blade,FLADE),以在更大范围内调节外涵流量[10]。
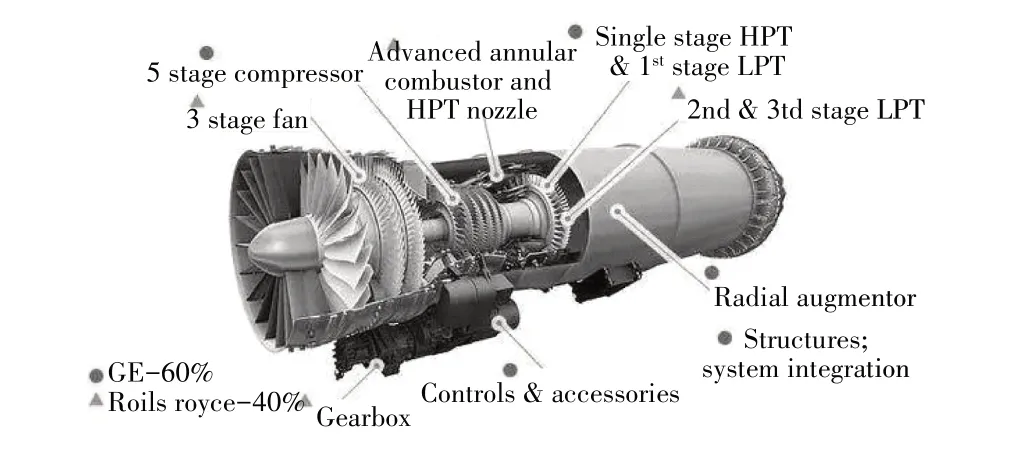
图5 GE、RR公司设计的第5代变循环发动机
在2003 年启动的VAATE 计划支持下,美国GE公司基于COPE 变循环方案,提出了研制更为先进的自适应循环发动机(Adaptive Cycle Engine,ACE)设计方案[11],采用FLADE、CDFS等调节机构将可调外涵道数量提升至3 个,可形成单涵循环、双涵循环、3 涵循环工作模式。在2016 年启动的自适应发动机过渡(Adaptive Engine Transition Program,AETP)计划支持下,2021年5月,美国GE公司完成了对下一代自适应循环发动机XA-100 的台架试车,达到了预期测试目标,发动机能在高推力和高效率2 种不同模式下无缝转换;同年9 月,启动第2轮台架试车;预计于2025年进入飞行试验验证阶段。GE 公司研制的下一代自适应循环发动机XA-100如图6所示。
图6 GE公司研制的下一代自适应循环发动机XA-100
2 变循环调节机构构型设计
2.1 模式切换阀调节机构
模式切换阀通常仅存在打开、关闭2 种极限状态,其调节机构设计的总体要求为低泄漏量、快速响应和可靠安装。依据阀体开闭的控制方式,可分为主动式和被动式。其中,主动式是采用联动环-连杆机构,该类机构通过转动或平动的联动环带动连杆,对阀体施加拉压载荷以控制其打开和关闭,周向转动联动环主动控制式模式切换阀和轴向滑动联动环主动控制式模式切换阀如图7、8 所示;被动式是通过控制阀体前后的压差,并设计提供反作用力的弹簧机构以控制阀体的打开和关闭,弹簧连接被动控制式模式切换阀如图9所示。
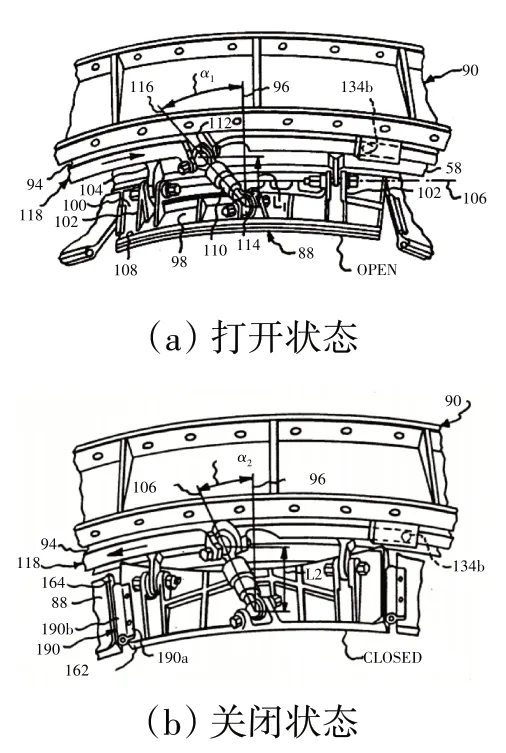
图7 一种周向转动联动环主动控制式模式切换阀[12]
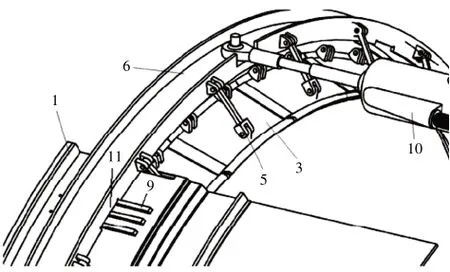
图8 一种轴向滑动联动环主动控制式模式切换阀[13-14]
2.2 涵道引射器调节机构
涵道引射器除打开、关闭2 种极限状态外,还因其几何面积比对主流的影响,存在用于精准流量控制的中间状态,其调节机构设计的总体要求包括低泄漏量、高调节精度和可靠安装。按照阀体对流场的干预形式可分为节流式和导流式。其中,节流式在关闭状态采用环形阀体结构将涵道流场截断,一种形式是将作动筒置于机匣内部,在打开状态将阀体隐藏而不再对流场产生影响,内置作动筒截流式前涵道引射器如图10 所示;另一种形式是将作动筒置于机匣外部,通过曲柄-连杆机构控制阀体前后移动,外置作动筒截流式前涵道引射器如图11 所示。导流式在打开状态采用射流方式将内涵气流导入外涵的同时,对气流方向加以控制,而减小不同涵道气流掺混时产生的损失,作动筒内置导流式前涵道引射器如图12所示。
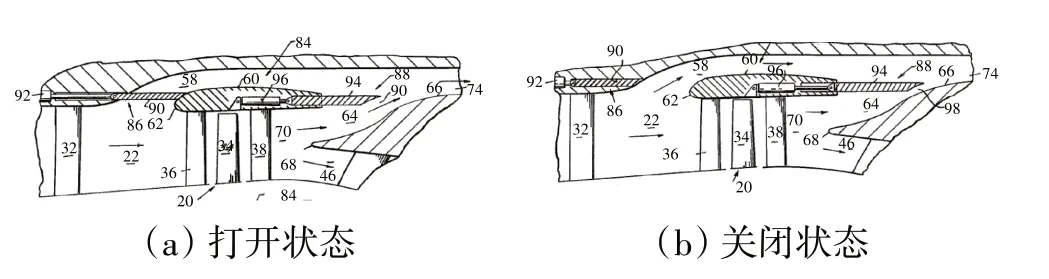
图10 一种内置作动筒截流式前涵道引射器[12]
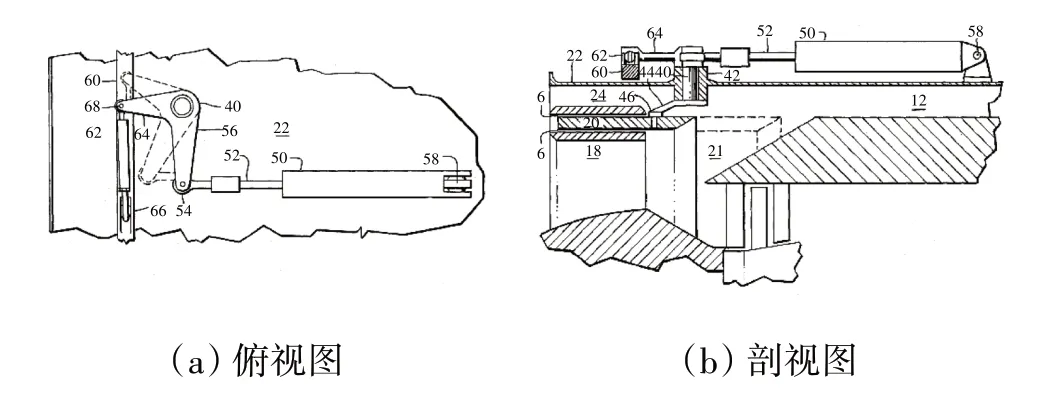
图11 一种外置作动筒截流式前涵道引射器[16]
图12 一种作动筒内置导流式前涵道引射器[17]
针对后涵道引射器调节机构设计,按照外涵道与内涵道气流的掺混形式,可分为导流式与预混式。其中,导流式在改变外涵气流方向时依旧保持其轴对称特征,阀体结构简单,2种射流式后涵道引射器如图13所示。预混式通过波瓣型阀体结构或设计开槽,使外涵气流方向呈周期对称特征,阀体结构相对复杂,4 种掺混式后涵道引射器如图14所示。
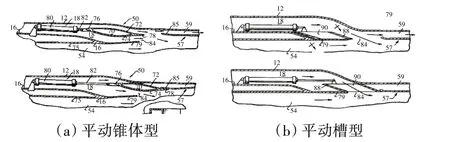
图13 2种射流式后涵道引射器[18]

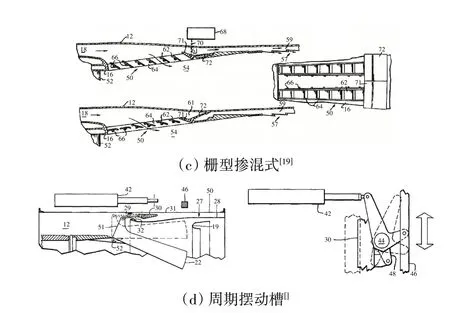
图14 4种掺混式后涵道引射器
2.3 导向器调节机构
导向器通常要求在一定角度范围内实现高精度调节,其调节机构设计的总体要求包括高精度调节和可靠安装。其重点在于结构形式简单(尺寸小、质量轻),精准快速调节(刚度大、阻力小),长期稳定服役(耐摩擦、寿命长、可靠性高),以及关键件失效预防(转轴弯矩小、预防连杆断裂)。同时,“联动环-曲柄-转轴-花键”结构是导向器调节机构的主要形式,可进一步通过连杆结构实现多级调节机构的协同控制。基于总体结构布局要求适应性开展联调/分调机构、连杆结构强度、转轴结构支点及连接结构摩擦设计是该机构细节设计的主要内容,重点关注温差、压差影响下传动结构抗变形能力及流量泄漏问题。不同驱动形式、支撑方式的导向器如图15所示。
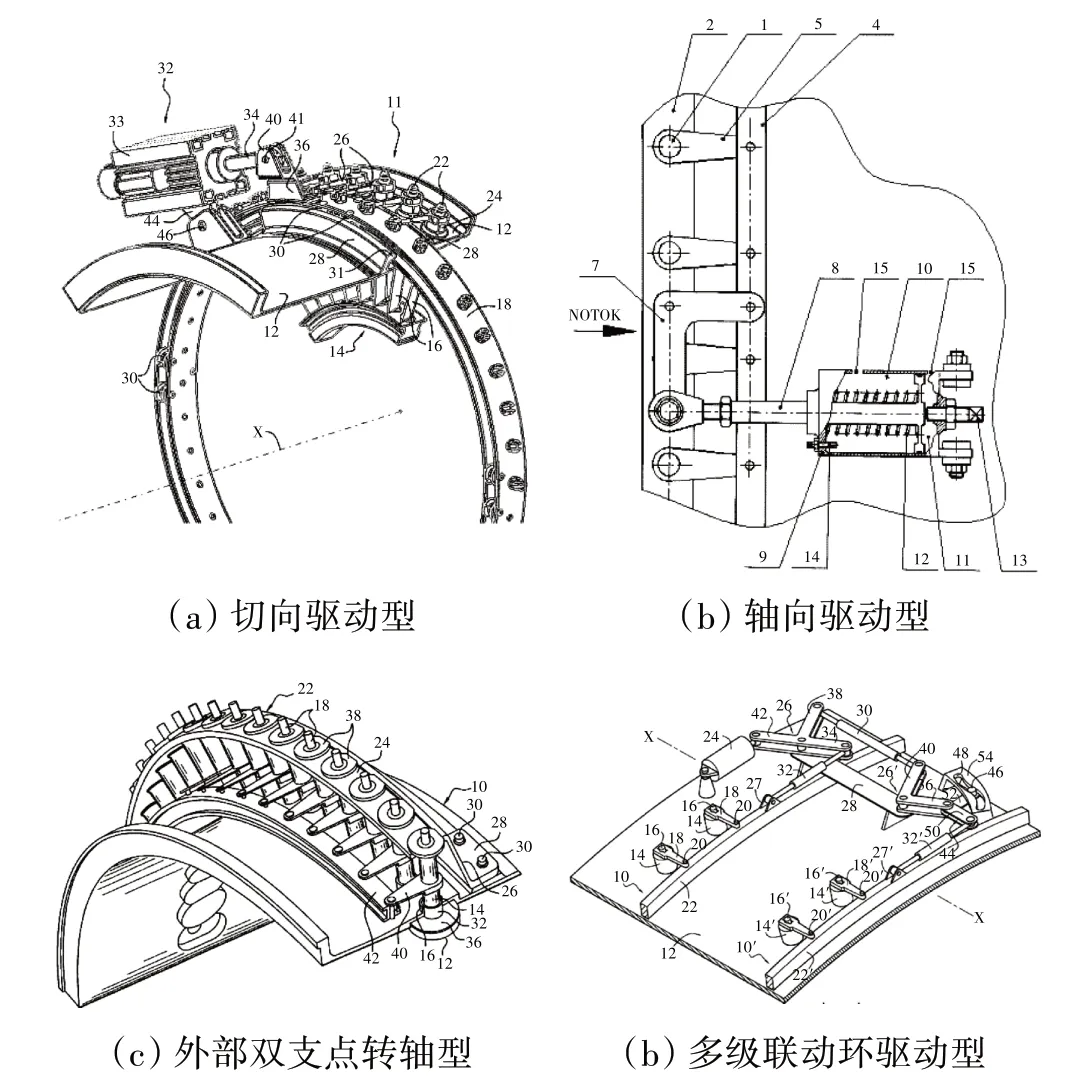
图15 不同驱动形式、支撑方式的导向器
2.4 调节机构设计要求
变循环调节机构的总体设计要求包括低泄漏量、高调节精度、快速响应、稳定调节,需重点解决。
(1)高热力负荷下的低泄漏量设计问题。运动件与静止件间隙增大,是造成流量泄漏的主要因素。因此,需开展高温结构抗变形设计,以满足热、机械变形下调节机构的低泄漏量设计要求。
(2)高温刚度衰减导致的调节误差问题。高温环境造成机构传力路径上的结构刚性降低,是导致调节误差的主要原因。因此,需合理设计联动环等关键结构,通过变形协调设计提升机构高温抗变形能力,以实现精准调节。
(3)瞬态调节过程的快速响应问题。调节过程涵道温度、压力瞬变、气动阻力是影响响应速度的关键因素。因此,需开展流热固瞬态分析,获取温度、机械负载,通过原理构型设计,减小气动阻力,缩短响应时间。
(4)空间布局受限时的机构稳定调节问题。高性能指标导致机构服役条件苛刻,紧凑安装约束导致空间布局受限。因此,需简化安装结构、缩短传力路径、减少零件数量、降低运动复杂度以实现可靠安装,支撑调节机构高精度调节设计要求。
3 机构力学响应仿真技术
3.1 瞬态调节流固耦合分析
依据流热固耦合分析中系统方程形式和求解方式不同,可分为分区耦合方法和整体耦合方法[19]。其中,分区耦合法采用计算流体动力学(Computational Fluid Dynamics,CFD)和计算结构动力学(Computational Solid Dynamics,CSD)分别求解流体方程和固体方程,使用有限元(Finite Element Method,FEM)、有限差分(Finite Difference,FD)和有限体积(Finite Volume,FV)方法等基于网格的欧拉方法求解流体控制方程;使用拉格朗日有限元方法求解固体方程。然而,由于分区耦合方法在本质上很难保证准确的动量和能量守恒;当2 相界面动态变化剧烈时,数值误差不断累积而发散,甚至导致计算失败。
整体耦合求解算法不明显区分流体域和固体域,把流体和固体看成是单一的整体连续介质,只认为每个子域具有不同的材料属性。从而能够在相同的数学框架下构建统一的运动控制方程,采用同样的未知变量,实现同时求解[20-22],具体包括任意拉格朗日-欧拉法[23-24]、整体欧拉描述法[25-26]、整体拉格朗日描述法[27-28]。其中,整体拉格朗日描述法消除了欧拉描述下自由表面和界面追踪的问题,避免了欧拉描述下通过求解压力泊松方程带来的复杂计算,为直接数值模拟(Direct Numerical Simulation,DNS)提供了高效的解决方案。然而,整体拉格朗日法面临网格纠缠、畸变问题,限制了其在流固耦合求解中应用。
调节机构作动过程的流固耦合分析问题,存在几何特征复杂(如模式切换阀及其封严结构)、结构柔性(如涵道引射器的薄壁阀体)、空间跨度大(cm 级位移)、瞬态特征显著(s 级响应时间)等特征,使得分区耦合求解方法面临不收敛、整体耦合求解方法面临网格畸变等数值问题,是调节机构瞬态载荷分析的主要挑战。因此,需进一步突破高效网格重构分析技术,解决传统动网格技术中的网格畸变问题,并提升瞬态模拟的数值稳定性[29]。此外,近年来迅速发展的基于整体拉格朗日框架的无网格方法,也有望成为实现瞬态流固耦合高精度模拟的可行途径[30]。
3.2 多体系统运动学/动力学数学模型
调节机构在运动输入端和输出端之间具有多级传动结构,通过多个运动副进行连接,是典型的多体系统。近年来,国内外学者针对多体系统的建模方法、求解策略、设计方法等开展了深入研究,为其在调节机构设计中的应用奠定了有利基础。按照建模过程中是否考虑结构变形,可将多体系统模型进一步划分为运动学模型和动力学模型。
多体系统运动学模型假设各传动结构为刚体,不考虑结构变形,用于研究各部件在调节过程中的运动关系。空间机构的常用分析方法包括方向余弦矩阵法、球面三角法、Denavit-Hartenberg(D-H)矩阵法[31]等。其中,D-H 矩阵法通过引入1个描述空间坐标变换的4 阶矩阵,以构建多体系统刚体运动学控制方程,具有表达形式简单、通用性强的优点。
为进一步考虑运动过程中的结构变形影响,进一步发展了多体系统动力学模型,按照方程的形式差异,可分为微分代数方程、非线性微分方程和关于系统边界状态矢量的总传递方程[32]。类似D-H 矩阵法的思路,绝对节点坐标方程(Absolute Node Coordinate Function,ANCF)法[33-34]在总传递方程中采用绝对节点坐标描述机构位置,并基于弹性理论描述结构变形,从而为调节机构瞬态大位移、大变形耦合问题提供一种快速求解方案。
3.3 运动学/动力学3维仿真分析
在3 维仿真分析方面,类似地也可分为不考虑结构变形的刚体运动学仿真和考虑结构变形的柔性动力学仿真。区别于多体系统数学模型,3 维仿真分析的优势在于对传动机构在3 维空间中的结构尺寸及变形状态具有更加精准的描述能力,通常与3 维建模软件和3 维有限元分析软件结合,以检验调节过程中的机构卡滞问题[37-39]。
调节机构作动过程的动力学仿真分析问题,需重点关注关键件柔性变形、装配间隙、尺寸公差、传动摩擦等因素,在设计后期,可基于瞬态流固耦合分析所得机构气动负载,分析给定运动规律下的惯性负载,量化关键柔性件变形,从而在仿真层面验证机构可行性,并实现调节精度有效评估[40]。区别于分级调节,多级联调机构仿真分析2 种求解逻辑。一方面,与分级调节类似,针对已有调节机构设计方案,开展各组件运动规律的仿真分析,得到输出端的运动规律;另一方面,考虑到各级叶片调节规律的差异,需依据目标运动规律求解各连杆结构参数及连接关系,属于反问题[41-43]。
柔性变形是造成机构卡滞的最关键因素,特别是对于工作在高温环境下的薄壁、细长杆等抗变形能力较差的零部件,瞬态变形状态的精准模拟对机构卡滞问题的仿真分析尤为重要。现有研究普遍采用有限元模型,在刚体运动学分析基础上进一步引入柔性件定义,将运动仿真软件(如ADAMS)与变形分析软件(ANSYS或ABAQUS等)相结合,量化柔性件变形量[35]。
装配间隙、尺寸公差是调节机构制备中必然存在的,而在ADAMS等运动仿真分析软件中,仅支持定义无间隙、精确结构尺寸力学模型的定义,因此,有必要根据含间隙铰的力学模型,并利用其它约束联合建立等效的约束,并通过参数化建模及尺寸随机抽样等方式,采用二次开发实现集成应用。常用运动副间隙模型包括基于拉格朗日方程的连续接触模型(忽略运动副微小变形和运动副间摩擦力)、基于牛顿法的接触-自由模型(忽略运动副间碰撞特性)、基于动量定理的自由-碰撞-接触模型(系统动力响应与实际最为接近)。
传动摩擦是伴随曲柄连杆、结构支撑产生的机构运动阻力,是影响调节精度和响应速度的关键内容。解决该问题的基本途径是通过准确表征运动副的接触状态,实现摩擦力及其阻力矩的准确评估;进一步在3 维仿真分析中定义阻力矩与调节量间的数学关系,准确表征传动摩擦影响。
4 机构可行性试验验证
4.1 瞬态温度、机械负载试验室模拟
在调节过程中关键柔性件的变形受到温度、机械负载(气动载荷和惯性载荷)的共同影响,在工程上通常采用全尺寸试验件吹风试验(技术成熟度5 级以上),以从试验层面验证机构可行性并量化调节精度。然而,由于吹风试验成本高、周期长,通常用于设计后期的部件级考核验证,而难以支撑初期阶段(技术成熟度3~4 级)的迭代设计。为此,需进一步发展试验室环境下的温度、机械复杂试验模拟技术,通过数值仿真确定对关键件局部加热、加载方案,使结构刚度及变形状态与实际服役状态相似,从而在较低技术成熟度阶段实现设计方案的验证,以缩短设计迭代周期。
对于模式选择阀而言,由于多采用分瓣式结构特征,阀门片之间以及阀门片与支板等承力结构之间存在间隙,通常需要设计密封结构以满足低泄漏量设计要求,因此,其测试关键在于模拟温差、压差下泄漏量准确监测。
对于前/后涵道引射器而言,考虑到其流量控制存在中间状态,要求全过程满足调节精度要求,因此,其测试关键在于阀体位置的精准测量;此外,由于阀体结构通常为薄壁筒体,在稳态、瞬态载荷下的变形量测试也是验证结构变形预测精度、预防机构卡滞问题的关键内容。
对于压缩系统/涡轮系统导向器而言,由于其转轴多位于内外涵道之间,同样受到温差、压差影响,密封结构的流量泄漏是其试验测试的关键内容;此外,考虑到转轴往复运动存在的摩擦、磨损问题,需对封严结构接触部位的磨损状态进行监测,确定磨损量随往复运动次数的变化规律。
4.2 关键柔性件位移及变形在线监测
现有针对调节机构的可行性验证,通常仅监测机构运动输出,以验证机构调节精度及是否发生卡滞。由于缺少必要的在线监测手段,尚未实现柔性关键件变形的在线监测,导致机构调节精度不足或发生卡滞问题时难以实现故障原因的准确定位。位移及变形在线监测的难点在于:(1)调节机构组件多、空间小,传统接触式传感器敷贴、引线困难;(2)部分调节机构工作于高温环境,要求位移、变形传感器具有高温测试能力并满足精度要求;(3)瞬态调节过程响应时间往往在3 s以内,为保证全调节过程的状态测量精度,传感器需具有一定的频响能力;(4)考虑惯性力是影响瞬态变形的关键因素,为避免传感器对测试结果的不利影响,需尽可能降低传感器在运动机构中的附加质量。
为有效监测瞬态调节过程中关键柔性件的位移及变形状态,同时避免传感器对调节过程的附加影响,应用微小型接触式传感器及非接触式传感器等,在低附加质量下实现调节机构位移及变形实时监测,是实现调节机构故障定位、误差归因的关键手段。
5 结论
(1)调节机构设计的总体技术要求为低泄漏量、高调节精度、快速响应和可靠安装,需重点关注高热力负荷下的低泄漏量设计、高温刚度衰减导致的调节误差、瞬态调节过程的快速响应及空间布局受限时的机构稳定调节问题;
(2)调节机构作动过程的流固耦合分析具有几何特征复杂、结构柔性、空间跨度大、瞬态特征显著等特征,使得传统流固耦合分析存在网格畸变、收敛性降低问题,高稳定性动网格技术及无网格分析方法是解决该问题的主要途径;
(3)调节机构作动过程的运动学及动力学仿真需重点关注关键件柔性变形、装配间隙、尺寸公差、传动摩擦等因素对机构卡滞、调节精度的影响;
(4)调节机构可行性试验需进一步突破瞬态调节过程中温度、机械负载的试验室模拟技术,以支撑初期阶段的迭代设计,应用微小型接触式传感器及非接触式传感器等测量手段,在低附加质量下实现调节机构位移及变形实时监测,是实现调节机构故障定位、误差归因的关键手段。
