丘陵山地拖拉机底盘三点调平机构稳定性分析
2023-05-10孙乾坤杨艳明郑德聪李志伟
孙乾坤,张 静,杨艳明,郑德聪,李志伟
(山西农业大学农业工程学院,山西 晋中 030801)
0 引言
我国土地面积广阔,丘陵山地占全国土地面积70%以上,丘陵山地地势起伏,多以陡坡斜坡形式存在,致使丘陵山区农业机械化发展受到了限制[1-3]。现有普通拖拉机底盘很难胜任大坡度、高起伏的作业环境,易出现倾翻的安全隐患。研发具有良好适应性和稳定性的丘陵山地拖拉机底盘,对于提高山区农机化水平有重大意义,其中调平机构是丘陵山地拖拉机关键部件。国内外对于拖拉机的调平机构做了大量研究。日本研制的S-30 型四轮驱动段轴式施肥拖拉机,各轮段轴臂采用独立动作实现施肥机在坡地行走时车身保持水平[4]。美国研发的坡地联合收割机电液自动调平机构,通过片膜与触点接触来控制电磁阀阀心的动作给油缸供油,从而保持其水平状态[4]。王涛等[5]研发了微型履带山地拖拉机车身液压自动调平机构,通过单片机处理倾角传感器和限位开关的信号,做出调平决策,进而实现车身自动调平。王学良[6]研制了一种全液压驱动的三角形四履带动力底盘,可满足横向及纵向坡面的调平。为此,根据丘陵山地拖拉机稳定性和适应性要求,设计一种可实现底盘自调整的三点式液压调平机构,并运用经典力学方法对底盘稳定性进行理论验证,旨在解决丘陵山地拖拉机自动调平的关键技术问题。
1 总体设计方案
丘陵山地拖拉机底盘包括传动系统、制动系统、行走系统、调平系统、转向系统及车架等,如图1 所示,主要由前驱动轮、前摇摆支撑臂、车架、散热器、快慢挡变速箱、变速箱、离合器、后摇摆支撑臂、后驱动轮、万向节、锥齿轮换向箱、前转向驱动桥、发动机机架、发动机和后转向驱动桥等组成。整机采用机械传动方式,发动机、变速箱及动力换向机构等以车架为载体布置于车架上,车架铰接于前后驱动桥上的摇摆机构,并在前转向驱动桥上布置一个调平液压缸与机架铰接,实现车身调平。底盘使用质量为2 200 kg,外形尺寸为2 545 mm×1 588 mm×1 251 mm,配套动力为58.8 kW,底盘轴距为1 800 mm,轮距为1 296 mm,底盘最小离地间隙为312 mm。

图1 丘陵山地拖拉机底盘结构示意Fig.1 Chassis structure of hilly mountain tractor
2 调平机构设计
2.1 结构设计
根据丘陵山地拖拉机工作特点,采用液压自动控制车架平衡方案,构成三点调平机构,如图2 所示,主要包括左侧驱动轮、前转向驱动桥、车身、调平油缸、固定铰接支座、右侧驱动轮。车架固定支撑座、摇摆支撑座及固定铰接支座。即在前转向驱动桥上设计摇摆支撑座及调平液压缸,与后转向驱动桥的摇摆支撑座形成三点调平机构,以摇摆支撑座为固定铰接点,机架固定支座与摇摆支撑座通过连接螺栓紧固,调平油缸通过固定铰接支座将前转向驱动桥与车身以圆柱形销钉连接。

图2 底盘调平机构机构示意Fig.2 Structure of chassis leveling mechanism
在车身调平过程中,通过控制液压油缸活塞的伸缩保证前后摇摆支撑座的中心线与前后桥的传动输入轴中心线重合,车身以该中心线为旋转中心完成车身在不同路况的横向调平。当底盘工作在向左倾斜的坡地路面时,左右两侧驱动轮均向左倾斜,此时调平油缸无杆腔出油,有杆腔进油,通过调平油缸的“拉回”运动,车身向右平衡,直到水平。当底盘工作在右倾斜的坡地路面时,调平油缸的无杆腔进油,有杆腔出油,通过调平油缸的“推出”运动,车身向左平衡,直到水平。当底盘在水平路面上工作时,调平油缸不工作。这样在越障和爬坡时可保证车身始终处于水平状态。
2.2 理论调平角度计算
衡量调平机构性能的主要指标是调平角度的范围,调平角度越大,拖拉机面对复杂作业环境的调平能力越好。调平机构的调平角度取决于摇摆支撑座的高度,达到理论最大调平角度时,前转向驱动桥的固定铰接座中心正好平行于摇摆支撑座的下边沿,由此计算最大横向调平角度,摇摆支撑座的摇摆中心点与固定铰接中心点的距离b=297.5 mm,摇摆中心点与摇摆支撑座的下边沿距离a=136.5 mm,底盘左倾斜结构如图3所示。
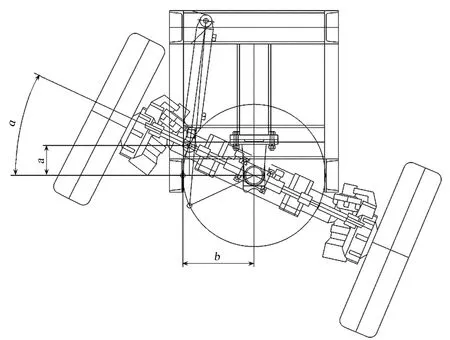
图3 底盘左倾斜最大调平机构Fig.3 Maximum leveling mechanism for left tilt of chassis
由式(1)可知,底盘最大调平角度αmax为25°,同理,右倾斜时求得最大调平角度为—25°。可确定底盘的调平角度为—25°~25°,满足丘陵山地拖拉机作业要求。
2.3 调平机构运动学分析
2.3.1建立数学模型
底盘调平机构调平原理如图4 所示,A点为摇摆支撑座与机架固定支座的连接点,B点为前转向驱动桥上的固定铰接支座,C点为车架上的固定铰接支座,通过调平油缸的伸缩完成底盘的调平工作。由此绘制矢量图,如图5 所示,以前转向驱动桥回转中心A点为坐标原点,垂直向上方向为y轴,建立符合右手定则的坐标系。

图4 底盘调平机构原理Fig.4 Principle of chassis leveling mechanism

图5 底盘调平机构矢量分析Fig.5 Vector analysis of chassis leveling mechanism

2.3.2Simulink 仿真模型
运用Simulink 软件对底盘调平机构进行运动学数学模型分析,得到调平机构角度、角速度及角加速度的仿真模型,如图6 所示。调平机构运动学仿真初始参数如表1 所示。

表1 调平机构初始位置参数Tab.1 Parameters of initial position of leveling mechanism
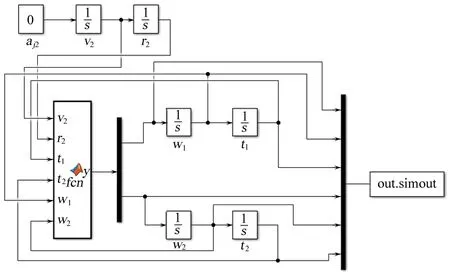
图6 底盘调平机构的Simulink 仿真模型Fig.6 Simulink simulation model of chassis leveling mechanism
2.3.3 仿真结果分析
调平油缸的动作范围为526~776 mm,速度设定为55 mm/s,最终确定仿真时间为4.5 s。调平油缸角度变化规律如图7 所示,底盘在调平过程中,转向驱动桥存在左倾斜和右倾斜两种状况,调平油缸变化范围为63.9°~107.5°,整个调平过程角度变化较大,可适应丘陵山地各种陡坡斜坡作业。

图7 调平油缸角度变化Fig.7 Angle change of leveling cylinder
如图8 所示,调平油缸的角速度为—0.206 1~—0.153 5 rad/s,角速度变化慢,变化范围小,说明油缸工作过程中运行平稳,有利于保持底盘工作的稳定性。

图8 调平油缸角速度变化Fig.8 Angular velocity change of leveling cylinder
调平油缸角加速度变化规律如图9 所示,其角加速度在—0.0035~ 0.0358rad/s2之间变化,角加速度数值大小先由0.035 8 rad/s2减小至0 后增大到0.003 5 rad/s2,其变化范围较小,说明调平油缸受力恒定,不会出现受力过大的现象。

图9 调平油缸角加速度变化Fig.9 Angular acceleration change of leveling cylinder
3 底盘稳定性分析
3.1 重心位置估算
拖拉机底盘的重心位置(d,e,h)直接影响整机的稳定性,拖拉机重心离地高度h越低,越靠近底盘几何中心,拖拉机在工作过程中稳定性越好。因此需要对拖拉机底盘的重心位置进行估算,拖拉机底盘主要部件呈纵向对称布置,可不考虑横向坐标e的影响,如图10 所示。

图10 山地拖拉机重心位置Fig.10 Centroid position of mountain tractor
式中 λo—拖拉机质量分配系数
L—拖拉机轴距,mm
d—后驱动轮到重心距离,mm
拖拉机为四轮驱动且前后轮大小一致,所以取λo=0.40,底盘轴距L=100 mm,由式(7)可得d=1 080 mm,同时重心高度取h=745 mm。
3.2 纵向稳定性
3.2.1坡道纵向上坡翻倾角
由于丘陵山地拖拉机在上坡过程中一般为低速且等速情况,空气阻力忽略不计,可用坡道纵向上坡翻倾角、坡道纵向下坡翻倾角和坡道纵向滑移角3 个指标来衡量其纵向稳定性[7-10]。如图11 所示,在上坡过程中所受作用力:拖拉机的底盘重力G(N)、地面对底盘的法向支持力F2(N)、轮胎的牵引力F1(N)、轮胎的滚动阻力F3(N)、底盘的制动力F4(N);设纵向坡的角度为δ,分析受力情况,由力矩平衡可得:

图11 山地拖拉机底盘上坡受力分析Fig.11 Force analysis of mountainous tractor chassis uphill
由式(12)可知,上坡发生翻倾的极限角为55.38°,纵向上坡时,底盘质心与地面之间垂直距离h越小,地面对底盘的法向支持力F2与底盘后轮与地面接触点O1的距离越大,则底盘的稳定性越高,越不容易发生翻倾[11-12]。
3.2.2坡道纵向下坡翻倾角
由图12 可知,底盘下坡时受力情况与上坡相比仅增加了底盘制动力F4,由于丘陵山地拖拉机在下坡时一般为低速且等速情况,忽略空气阻力和惯性阻力的影响,通过力矩平衡方程可得

由式(16)求得,拖拉机底盘下坡发生翻倾的极限角为44.03°,小于上坡发生翻倾极限角55.38°,因此,在下坡时更容易发生翻倾。同理,在下坡时底盘重心与地面的垂直距离h越小,地面对底盘的法向支持力F2与 底盘后轮与地面接触点O2的距离越大,则底盘的稳定性越高,越不容易发生翻倾。
3.2.3坡道纵向滑移角
纵向滑移角指丘陵山地拖拉机底盘在空载状态下以制动方式停放在坡道上,不使底盘产生向下滑移的最大坡度角[13]。丘陵山地拖拉机底盘在上坡过程中处于制动时不产生滑移的最大坡度角为
丘陵山地拖拉机底盘在下坡过程中处于制动时不产生滑移的最大坡度角为

3.3 横向稳定性
3.3.1坡道横向翻倾角
假设拖拉机整车为刚体,建立拖拉机静态受力模型,如图13 所示,忽略空气阻力和惯性阻力等的影响,仅分析其横向静态稳定性。

图13 拖拉机底盘在横向坡道上受力分析Fig.13 Force analysis of tractor chassis on transverse ramps
随着坡度 β增加,重力线正好落在底盘下侧与地面的接触点O2上时,会发生横向翻倾,因此,不发生横向翻倾的极限翻倾角 βlim计算如下。
综上所述,为适应农艺要求,因拖拉机刚性结构B与h均难以改进,为增大整机的最大翻倾角,可通过将拖拉机刚性底盘调整为姿态可调式底盘的方式实现,改变底盘左右高度差,让轮胎与地面的接触角度小于地面倾斜度。不发生横向翻倾的极限翻倾角为40.01°,而底盘最大调平角度为25°,在达到横向极限翻倾角时,已达到最大调平角度,因此,底盘横向极限翻倾角为最大调平角即25°。因满足底盘坡地工作要求,具有良好的横向抗翻倾能力,可适应丘陵山地区横向坡面作业。

4 结束语
根据丘陵山地拖拉机调平功能和稳定性要求,设计了可实现底盘自动调平的三点调平机构,并进行了运动学仿真及稳定性理论验证。
(1)调平机构采用三点铰接结构调平方式,铰接装置分别布置于前后转向驱动桥差速器壳体上及前转向驱动桥内侧。在前进及作业过程中,通过调平油缸的“拉回”及“推出”动作,保证前后摇摆支撑座的中心线与前后桥的传动输入轴中心线重合,车身以该中心线为旋转中心完成车身在不同路况的横向调平。
(2)调平机构的调平范围为—25°~25°,上坡极限翻倾角为55.38°,下坡极限翻倾角为44.03°,上坡纵向滑移角为25.62°,下坡纵向滑移角为13.18°,可满足丘陵山地坡面作业需求。调平油缸角度范围为63.9°~107.5°,角速度范围为—0.206 1~—0.153 5 rad/s,角加速度范围为—0.003 5~0.035 8 rad/s2。
液压调平机构在车身调平过程中,系统压力、流量无明显变化,运行平稳,有利于保持底盘工作的稳定性,可适应丘陵山地各种作业环境。
