AUV 水下对接的发展与应用现状
2023-05-04袁学庆刁家宇李卫民张晋效
袁学庆,刁家宇,,李卫民,张晋效,徐 龙
(1.中国科学院沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳 110016;2.中国科学院 机器人与智能制造创新研究院,辽宁 沈阳 110169;3.辽宁工业大学 机械工程与自动化学院,辽宁 锦州 121000)
0 引 言
自主式水下机器人(autonomous underwater vehicle,AUV)作为海洋探索的一种有力工具,被广泛应用于水文观测、海洋监测、地质和生物调查等领域[1]。各种领域的工作都需要AUV 在水下独立自主完成,但是AUV 的水下工作存在功耗大和自身所能携带的能源有限等问题,使得AUV 在能源耗尽前需要返回水面支持平台进行能源补充。这将消耗大量的人力和物力成本,且工作效能受到极大限制。经过近几年相关领域的探索和研究,发现可以通过在水下建立对接DOCK 的方法解决此类问题[2]。水下对接系统具有广泛的研究前景[3-5],目前大量的国内外学者对此展开了深入的研究和探索,并取得了一定成果。本文针对一系列研究进展,以宏观视角对国内外先进研究成果分别从AUV 水下对接系统的分类、AUV 水下对接系统作业过程、AUV 水下对接精度的角度进行归纳和分析,并探讨对接技术在未来的发展趋势。
1 AUV 水下对接系统的分类
近几年,国内外研究学者根据不同的对接条件设计了多种AUV 水下对接系统[6]。其中美国具有代表性的科研成果有Woods Hole Oceanographic Institution 研发的Odyssey-IIB,Hydroid 公司开发的REMUS-100,Naval Ocean Systems Center 研发的Free Swimmer 和MBARI 研究所研发的Bluefin;日本各研究机构的代表性成果有川崎重工研制的Marine Bird 和东京大学研制的Tri-TON2;在欧洲方面,具有代表性的研究主要有Liverpool 大学研制的Swimmer;韩国则是Humanoid Robot Research Center 研制的ISIMI;中国为中国科学院沈阳自动化研究所和哈尔滨工程大学分别研发的“潜龙”号和“海灵”号对接AUV,同时,浙江大学等也均不同程度地为AUV 的水下对接技术做出了一定贡献。
根据目前国内外具有代表性的研究成果,按照自动化实现难度将AUV 水下对接系统分为3 类:以绳索、杆类为对接目标的捕捉式对接方式;以圆锥导向罩和笼箱类为对接目标的包容式对接方式;以水下平台为对接目标的落座式对接方式。其中由于以绳索、杆类为对接目标的捕捉式对接需要大量人工参与,且难以一次完成对接,所以该对接方式自动化程度最低;以圆锥导向罩和笼箱类为对接目标的包容式对接可以通过导向罩进行引导对接,允许的误差范围较大,且仅需要往前推动AUV 运动即可完成对接,因此该方式自动化程度最高;而以水下平台为对接目标的落座式对接方式类似于飞机着陆的对接方式,该方式没有明显的缺点和优点,因此该对接方式自动化程度为中等。表1 给出了水下对接系统的分类对比[7-9]。

表1 水下对接系统的分类对比Tab.1 Classification and comparison of underwater docking systems
以绳索、杆类为对接目标的捕捉式对接方式可以通过在AUV 上安装绳索和杆类的对接目标进行捕捉对接。典型的以绳索、杆类为对接目标的捕捉式对接方式的水下对接系统有Odyssey-IIB 水下对接系统和美军远期防水雷计划项目研究的LMBS 水下对接系统,对接结构如图1 所示[10-11]。其中,Odyssey-IIB 水下对接系统的机构由V 形剪和对接杆组成,当A U V靠近对接机构时,V 形剪就会触发弹簧,捕捉杆被顶到一侧,定位杆进入槽中会被捕捉杆锁住。美军远期防水雷计划项目研究的LMBS 水下对接系统可以利用鱼雷管来进行发射和回收AUV,该潜艇装有分别存放机械手和存放AUV 的2 具鱼雷发射管,机械手在鱼雷发射管内部,可进行向外伸展并捕获AUV,通过液压驱动的关节进行捕获,AUV 可以在机械手的操作下,被放入另一具鱼雷发射管中。
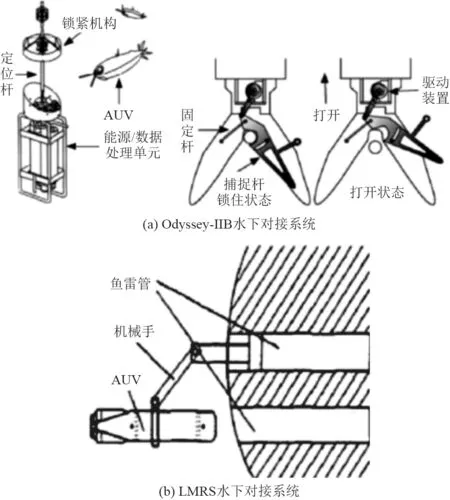
图1 以绳索、杆类为对接目标的捕捉式对接结构Fig.1 Capture docking mode with rope and rod as docking targets
以圆锥导向罩和笼箱类为对接目标的包容式对接结构,需要AUV 进入对接管或对接箱笼内完成对接。该类装置通常使用渐缩形的入口装置进行导向,使AUV 进入预定的轨道,顺利完成对接。典型的以圆锥导向罩和笼箱类为对接目标的包容式对接方式结构有REMUS AUV 水下对接系统和“海灵”号水下对接装置,对接结构如图2 所示[12-13]。其中,REMUS 自主式无人潜器的对接目标分两部分组成,一是圆锥导向罩,二是对接管,在其导向罩的上方安装有用于AUV和对接目标进行互动的搜索的声学设备[13-14]。哈尔滨工程大学在中国船舶科学研究中心研究成果基础上,研制了一种喇叭口式的引导对接装置。该套系统于2015 年完成海试成功,类似于REMUS 对接系统。同时,中国科学院沈阳自动化研究所研究的水下对接系统、浙江大学的“海豚二号”、日本东京大学研制的KOLABOT 对接系统,西班牙“赫罗纳大学”研发的Sparus 对接系统也与之类似。

图2 以圆锥导向罩和笼箱类为对接目标的包容式对接结构Fig.2 Inclusive butt structure with cone guide cover and cage type as butt target
平台坐落式对接原理类似于在航空母舰上舰载飞机着陆方式,不再垂直降落。当AUV 接收到对接命令,会对准水下平台缓慢降落,然后利用锁紧机构进行锁紧对接。对接装置包括坐落平台、导引索、阻拦索、挂钩等设备。典型的以水下平台为对接目标的落座式对接方式的研究有日本川崎重工研制的Marine Bird 和中国科学院沈阳自动化研究所的“探索者”号,对接结构如图3 所示[15-17]。其中,Marine Bird 水下回收系统的回收过程类似于飞机着落的过程,同时AUV下腹有2 个V 字形的捕捉臂,当AUV 接近平台时,捕捉臂便会锁紧对接平台。1994 年12 月,中国科学院沈阳自动化研究所研制成功的中国第一台潜深1 000 m的无缆水下对接机器人“探索者”号,在坐落过程中采用4 个捕捉臂捕捉裙带口进行锁紧,水下对接平台可以自动确定方向和深度。该AUV 已经顺利完成海上的回收试验。

图3 以水下平台为对接目标的落座式对接结构Fig.3 Seated docking structure with underwater platform as docking target
2 AUV 水下对接系统作业过程
在AUV 水下对接过程中,可以根据对接距离、对接时所需信息和传感器等因素阶段划分对接过程,以方便针对AUV 对接问题进行精确优化[18]。根据使用的传感器、水下环境和需要的定位信息等因素,将AUV 水下对接过程划为3 个阶段:远程阶段、中程阶段和近程阶段。表2 为各个阶段的描述和对比。
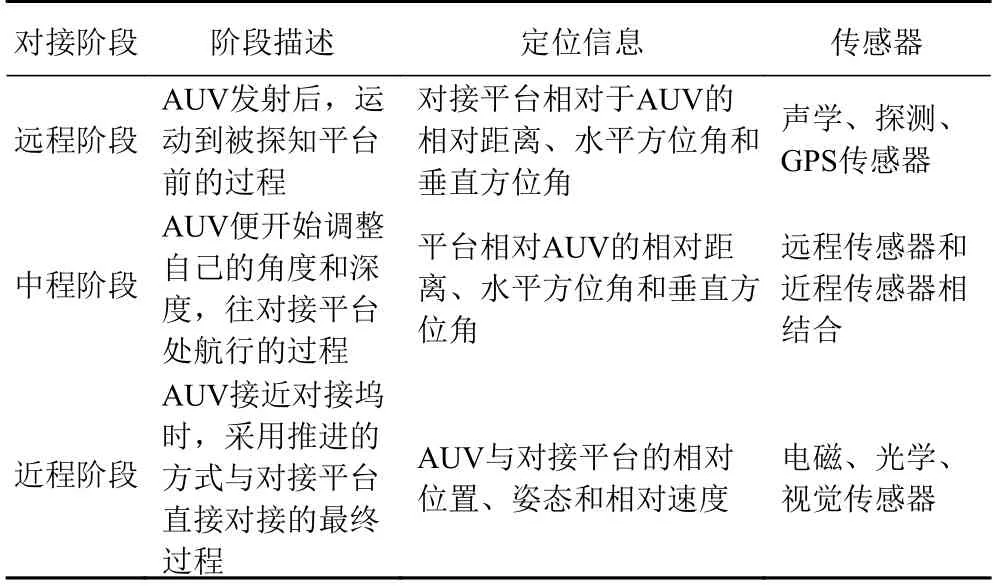
表2 各个对接阶段的信息对比Tab.2 Comparison of information at each interconnection stage
远程阶段又称“预接驳阶段”,是AUV 发射后,运动到被探知平台前的过程[19]。远程阶段不能直接进行通信或定位,该阶段可以利用LBL 和GPS 定位技术、惯性导航仪或磁罗经进行导航。远程阶段的位置信息通常需要获得对接平台相对于AUV 的相对距离、水平方位角和垂直方位角。该阶段适合的传感器为声学、探测、GPS 传感器。
中程阶段是指当AUV 与对接平台开始定位后,AUV 开始调整自己的角度和深度,往对接平台处航行的过程。该阶段通常使用超短基线定位系统(USBL)或LBL 进行声音定位[20-21]。由于中程阶段对接方式比较复杂,因此将AUV 中程阶段的水下对接方式划分为全向型对接和方向型对接进行讨论。对于全向型的对接平台,AUV 可从任意方向进行对接,所需的定位信息为平台相对AUV 的相对距离、水平方位角和垂直方位角。对于方向型对接平台,受可控自由度限制,路径需要重新规划,其需要的对接信息有平台相对AUV及其AUV 相对平台的相对距离、水平方位角和垂直方位角[22]。有关中程阶段用到的传感器文献较少,通常来讲,中程传感器可以使用远程传感器和近程传感器相结合的办法进行信息测量[23]。除此之外,采用USBL 导航也是已经被证实可行的方法[24]。
进程阶段是最后的引导和捕获,当AUV 接近对接平台时,通过高精度的测量传感器,进行精确的导航定位,采用推进的方式与对接平台直接对接的最终过程[25]。近距离阶段需要准确获取AUV 与对接平台的相对位置、姿态和相对速度。由于在近程阶段不需要调整位姿和深度,因此在近程阶段只需要少量且精准的定位信息,只要控制好航速和距离既可以完成对接。该阶段适合的传感器为电磁、光学、视觉传感器[26-28]。
整个对接流程图如图4 所示。

图4 水下对接流程图Fig.4 Flow chart of underwater docking
3 AUV 水下对接精度的问题
AUV 的水下技术研究尚未成熟,目前仍存在一系列的问题,尤其在对接精度方面。如AUV 在解决水下由涡流等不确定因素引起的干扰问题和选取处理图像信息的合理对接算法等。表3 为对接精度问题的简略分析。

表3 对接精度问题Tab.3 Docking accuracy problem
相对于空间的对接问题,水下的对接最主要的问题就是流体的干扰。流体干扰会严重影响对接的精度。AUV 在水下对接过程中最可能遇到流体干扰有以下3 种:①海流和波浪的干扰;②海底或庞大物体的轮廓流场干扰;③AUV 与水下平台非定向的移动,自发引起周围的流场改变。相对单种流体干扰问题,多种流场问题的耦合会更加复杂。对海流的扰动有2 种解决方法:①建立海流模型,把模型算法加入AUV 的六自由度方程中,运用新的算法进行控制;②对于圆锥导向罩或模块箱形的对接装置,可以使对接目标入口顺着海流方向。对于波浪影响可以根据波浪参数建立频谱回归方程,使AUV 的算法加入波浪的动态模型,以减少扰流的定位误差。对于水中庞大的物体引起的扰动,可采用流体力学的计算软件或理论计算进行控制,常用的理论计算方法有势流理论及其粘性流N-S 方程理论[29-33]。
由操作和导航引起的对接问题通常会导致在规定时间和地点内AUV 偏离对接目标或未能找到对接目标。这一系列问题是AUV 能否对接成功的关键问题。对于AUV 对接过程中的操作问题,可以采用基于混杂系统的控制算法、模糊控制算法、分层递阶控制算法和评价函数算法等实现水下过程中的控制,以达到优化对接时间、减少耗能、减少碰撞率的目的。而对于导航问题,可以通过选择合适的导航传感器的类型来提升对接的准确率。同时,在控制准确对接的工作下,还要进行失误检测。常用的失误检测方法可以借助水面监控和水下对接通信技术实现。对于防止对接失误的方法中,哈尔滨工程大学设计的水下对接系统采用水下对接裙的方法,也可以引导AUV 顺利进度对接航道。为了万无一失,在对接结束后,应设置对接失误策略。若AUV 未发现对接目标,则AUV 应通过水面遥控或自主航行到初始位置进行二次对接,Odyssey-IIB AUV 便有此功能[34]。
合理的控制算法也能保证对接的最终精度。对接控制策略是AUV 根据海洋环境、流体干扰、对接状态、对接装置的性能等因素制定最合理对接路径的策略,目的是减少AUV 在水下的对接时间和对接失误,并保证最终顺利完成对接。对接控制策略和控制算法相对应,常用的水下对接控制策略有基于混杂系统的控制算法、模糊控制算法、分层递阶控制算法和评价函数算法。
1)混杂系统的控制算法是基于连续变量和离散变量的动态系统混合而成的系统算法[28]。在对接过程中,将各个对接阶段分别设置一个离散子目标状态,并建立监督控制模型。当水下对接过程比较复杂时,可以使用基于混杂系统的控制算法。
2)模糊控制算法的优势是在整个对接过程中不需要详细的了解周围的环境,它可以根据AUV 的姿态和性能,把对接过程分为若干个单元,随着AUV 越来越接近对接平台,对接精度也会越来越精确[35]。
3)分层递阶控制法是将对接的控制算法分层处理,每层都有独立的执行功能,执行上层的同时,也会对下层进行监控。通常对接控制可以分为3 层:规划层、决策层、执行层。规划层进行目标任务规划;决策层对每个目标进行详细方案的制定;执行层完成决策层的命令[36]。
4)水下对接可采用对速度和位置的匹配评价进行控制引导,这个过程可采用现行二次校正器控制,需要同时惩罚额外的能量消耗,且最终的相对距离要求为0[37]。
4 发展方向和关键技术讨论
根据国内外的最新研究成果,AUV 对接系统的发展方向如下:以锥形罩类DOCK 为主的适用性更强的对接方式;范围更广的控制和导航技术;涵盖DOCK不同状态的对接方式;搭载通用性的标准化对接接口;基于神经网络的智能对接算法。
4.1 以锥形罩类DOCK 为主适用性更强的对接方式
根据前文分析,对接系统可以分为以绳索、杆类为对接目标的捕捉式对接方式;以圆锥导向罩和笼箱类为对接目标的包容式对接方式;以水下平台为对接目标的落座式对接方式。然而第1 种对接方式需要配备较长的绳或杆,水中水流对其会造成不可估量的影响;第3 种对接平台式对接对AUV 轨迹的精准度要求较高;唯有第2 种,可以在改造后的情况下结构更符合流体力学原理且具有导向的作用。同时现阶段,国内外学者对对接装置的研究更倾向于第2 种对接方式,即以圆锥导向罩和笼箱类为对接目标的包容式对接方式。李开飞等[38]通过对锥形对接装置的对接过程进行了多体动力学的理论分析;王香[39]利用ADAMS对锥形对接装置的对接过程进行了多体动力学的仿真模拟;闫鹏[40]对锥形对接装置的对接过程进行了水动力学分析等。
随着国内外学者的研究,锥形罩的结构逐渐由锥形发展到凹型,由实心状发展到蜘蛛网状,但如何减少AUV 第一次接触DOCK 时产生的碰撞载荷和如何通过导向罩形状减小AUV 前进时由水流带动的阻力等问题仍需解决。未来还需在目前已有的锥形导向罩上继续升级,使AUV 更快、更精准、更坚固地与DOCK进行对接。基于ADAMS 的对接流程图和基于Star 的对接流程图如图5 所示。

图5 水下对接仿真流程图Fig.5 Flow chart of underwater docking simulation
4.2 范围更广的控制和导航技术
由于水中存在一系列的水流和障碍物等问题,使得AUV 精确对接尤为复杂,因此可靠的控制和导航技术是保证AUV 对接的核心和关键技术。合适的控制和导航技术可以测量AUV 相对DOCK 的位置和速度,并按照预设的算法形成制导指令,通过姿态控制系统控制DOCK,使其按着预定的轨道顺利对接。
随着控制技术的发展,依靠优秀的控制技术完成了许多对接试验:Hydroid 公司[41]进行了Hydroid REMUS 100 型号的AUV 发射和回收试验,试验中DOCK始终浮于水面之上,对接时通过制导系统进行音频导航,经AUV 拉紧DOCK 捕捉线的末端完成对接。PALOMERAS N 等[42]进行了Sparus II 型号AUV 的对接试验,对接装置通过光学和声学制导系统辅助对接,最后通过锥形罩导向接驳。
然而上述试验研究在对接范围和操作条件上都存在一定的局限性。这些操作方法的实现需要有以下条件:AUV 的加速度和速度恒定;DOCK 完全是静止状态;忽略对接过程中电流的干扰。以上文献的试验也是在保证AUV 和DOCK 足够近的情况下进行的。虽然控制方法的通用性比较强,但是上述控制方法仅适合于AUV 最终对接过程的接驳阶段。因此还需要更加复杂和范围更广的控制技术。
4.3 涵盖DOCK 不同状态的对接方式
传统的AUV 对接通常是假设DOCK 被固定在地基中进行对接,然而随着科技的发展,这种静态对接方式已经不再满足现在的技术需求。因此动态对接是现在急需解决的一个问题。
在仿真层面,沈阳自动化研究所通过机械系统动力学自动分析仿真软件ADAMS(automatic dynamic analysis of mechanical system)和控制仿真软件Matlab/Simulink 分别对AUV 和DOCK 建立了静对接、悬浮对接和拖拽对接3 种对接运动接驳方案,并通过不同对接方案分析了对接时的水动力和碰撞力[43]。在试验层面,国内外多家研究机构进行了各种关于动静的运动状态对接试验。2018-2019 年期间,沈阳自动化研究所首次通过AUV 和水下基座的自主式试验研究,验证了动静与动动对接技术,试验中水深为7 m 处,对接后需要进行自主充电和数据传输。其中动静试验共进行了10 次对接,全部对接成功。动动对接试验共进行了22 次对接,全部对接成功。
虽然简单的动态问题已经试验成功,但其技术还不够成熟,未来应该具有保证更准确、更迅速的动态对接技术,同时还需涉及对接的追赶动态对接和相向动态对接问题。其中,不同状态对接方式的示意图如图6 所示。

图6 不同模式的水下对接示意图Fig.6 Schematic diagram of different modes of underwater docking
4.4 搭载通用性的标准化对接接口
接口问题尚未出现实质性的进展,但在未来的发展中,水下对接的通用性将是必不可少的功能。标准化的接口可以保证通用性和多功能性,包括不同型号AUV 之间的对接和不同型号DOCK 之间的对接,使对接平台成为集成的对接交换站。标准化接口的出现将会开辟一个全新的对接技术领域,对信息和能源的水下传输具有重要意义。
4.5 基于神经网络的智能对接算法
根据船舶动力学分析,船舶通常有6 个自由度需要考虑,即纵摇,摇摆,升沉,横摇,俯仰和偏航;而水面运动仅需要3 个自由度,即横摇、横摇和偏航。通过分别设置船舶与干扰模型构建神经元。船舶状态和环境信息可以作为输入参数,其中减缓状态包括位置、航向、船舶在各自由度的力和速度以及推进器的状态,环境信息包含个自由度的水流大小、方向和作用力,通过敏感度分析得到关键参数作为输入输出参数。训练样本可以来自真实的船舶对接或仿真模拟。对训练完成的神经网络进行优化求解得到。最终,理想结果是可以通过神经网络持续输出船舰航速及角度顺利进入DOCK。其控制策略可由图7 表达。

图7 智能对接的神经网络流程图Fig.7 Neural network flow chart of intelligent docking
5 结 语
1)本文介绍各个国家对于AUV 水下对接系统的研究成果。同时,为进一步阐明AUV 水下对接系统的结构,根据形态结构以及对接目标,将AUV 水下对接系统分为3 类并分别举例讲解:以绳索、杆类为对接目标的捕捉式对接方式;以圆锥导向罩和笼箱类为对接目标的包容式对接方式;以水中平台为对接目标的落座式对接方式。
2)根据对接装置和运动形式,对国内外AUV 水下对接系统的对接阶段进行划分,划分为远程阶段、中程阶段和近程阶段,同时分析了每个阶段所需要的信息。之后介绍了水下对接技术常用到传感器,根据3 个阶段进行介绍,其中远程阶段适合用声学传感器、测深传感器和GPS;中程阶段适合用USBL 超短基线进行定位导航;近程阶段可以用电磁传感器,视觉、光学传感器进行定位导航。在实际工程中AUV 应采用多种传感器的联合工作。
3)介绍AUV 水下对接的对接精度问题。首先介绍水下对接的干扰问题,分别分析·海流和波浪的干扰、海底或庞大物体的轮廓流场干扰、AUV 与水下平台非定向的移动,自发引起的周围的流场的改变的3 种流体干扰问题;随后从操作控制和导航两方面提出了对接失误的解决策略。最后总结了4 种常用的水下对接控制策略:基于混杂系统的控制算法、模糊控制算法、分层递阶控制算法和评价函数算法。
4)对AUV 对接的关键技术和发展方向从以下5 个方向进行探讨和分析:以锥形罩类DOCK 为主的适用性更强的对接方式;范围更广的控制和导航技术;涵盖DOCK 不同状态的对接方式;搭载通用性的标准化对接接口;基于神经网络的智能对接算法。为接下来关于AUV 水下对接的研究方向提供参考。
水下对接技术是AUV 水下回收、能源补充、信息传递的关键技术,随着水下对接技术的不断发展,AUV 对接的相关技术会更加成熟,涉及AUV 对接的相关领域将更加丰富,AUV 作为海底观测网系统的组成也会发挥越来越重要的作用。