基于光的反射和折射原理的自动水位控制
2023-04-29闫奕霏张思恬刘玉颖李海艳
闫奕霏 张思恬 刘玉颖 李海艳
关键词 自动水位控制;光的折射定律;光的反射定律;生活物理
水是生命之源,人的生活离不开水,在现实生活中,饮水机已经成为家庭必备的饮水设施[1]。据不完全统计,全国大中城市约有80 %的家庭拥有饮水机。为方便换水,市面最常见的落地式饮水机的高度为1.2~1.5m,出水口约为成年人腿部高度,大部分人需弯腰接水,尤其对于老年人极为不方便。另外,传统饮水机需要使用者手动接水,手动停止饮水机出水,这存在着极大的安全隐患[2-4]。此外,交叉感染是强传染性病毒传播的一个重要途径,因此非接触性饮水机在医院、商场等公共场所的应用可以有效减少病毒的传播,为人民健康和生命安全提供可靠保障。
本文利用光的折射和反射原理,在激光发射器和激光接收器位置不发生变化的情况下,通过超声波传感器感知水杯位置,开始注水,调节三棱镜角度,激光传感器检测水杯内水位,实现对多种杯型的水位控制,当杯内水位到达预定水位停止注入。该装置成本低廉、操作简单,体积小巧,可以应用在多种场景,具有很强的推广应用潜力。
1 功能设计
利用光的反射和折射原理,实现自动检测不同杯型的水杯,当杯内水位到达距离杯沿1cm 处自动停止注水。
将杯子高度和三棱镜角度之间建立模型关系。通过调节舵机的角度,带动三棱镜转动指定角度,以实现对光路的改变。当超声波传感器感应杯子放到指定位置,水泵开始向杯内注水;杯中水位到达预定高度,通过三棱镜的折射和水面的反射,使激光接收器接收激光信号后,停止注水。
2 装置原理及模型推导
2.1 装置原理
光在均匀介质中沿直线传播,而在遇到两种均匀介质的分界面时,一般会同时产生反射和折射现象[5]。通过三棱镜1,2能够有效改变光路,实现光感控制。
光遇到水面、玻璃以及其他许多物体的表面都会发生反射。反射光线与入射光线、法线在同一平面上;反射光线和入射光线分居法线的两侧;反射角等于入射角。
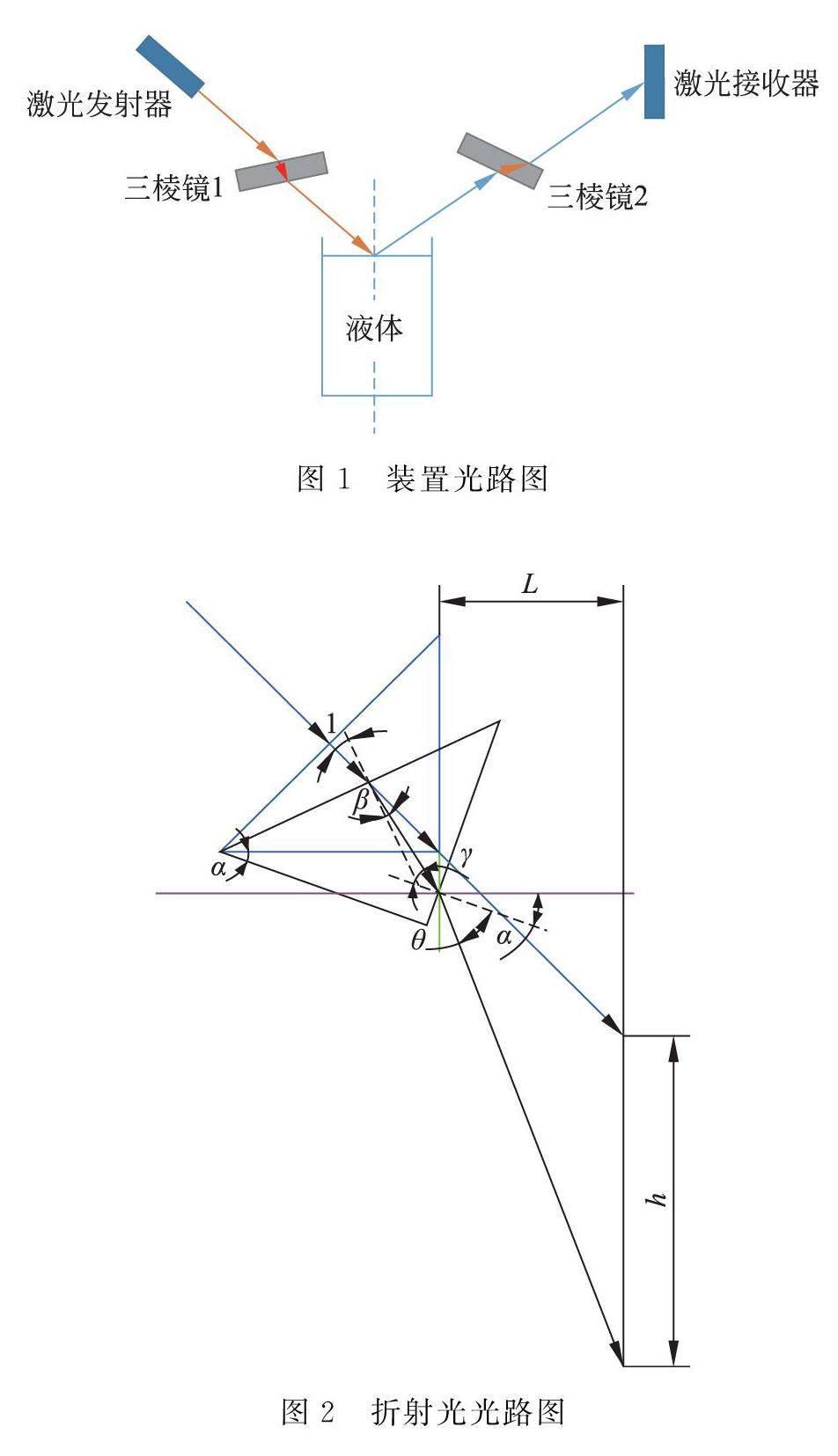
本装置利用光的反射和折射原理,以激光发射器为光源,通过调节三棱镜1的角度改变光的入射方向,将激光光路折射至杯沿平面下1cm 处杯体中心。当水位达到预定杯体高度(即杯沿下1cm),光通过三棱镜1照射到水面中心,通过光的反射,激光入射至三棱镜2。通过调节三棱镜2角度,可将光引至固定的激光接收器处。光路图如图1所示。
2.2 模型推导
本文建立了三棱镜从水平方向转动角度α 和杯子高度h/cm 之间的关系,模型推导如下:
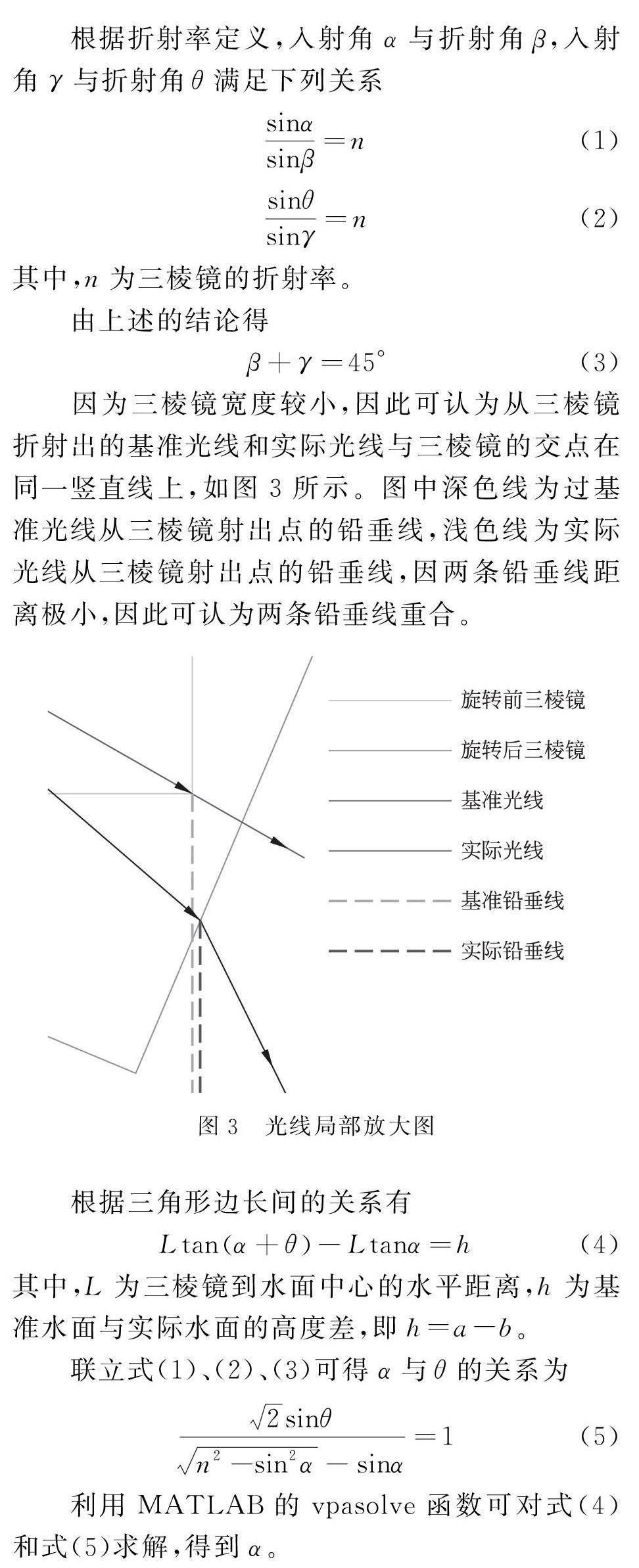
设杯子为基准高度a/cm 时,直角等腰三角形三棱镜恰好位于水平位置,光线不发生折射,照射点为水面中心。现计算杯子高度为h,光线照射在水面中心时,三棱镜需旋转的角度α(逆时针为正)。由于两角的两边分别垂直的两个角相等或互补且图中所标三棱镜旋转角度α 和入射角∠1均为锐角,所以可得入射角∠1等于三棱镜旋转角度α。三棱镜折射部分光路如图2所示。
本装置选取三棱镜作为折射介质片,在方便角度调节的基础上增加了折射次数,有效减小了装置的体积。
3 结构设计
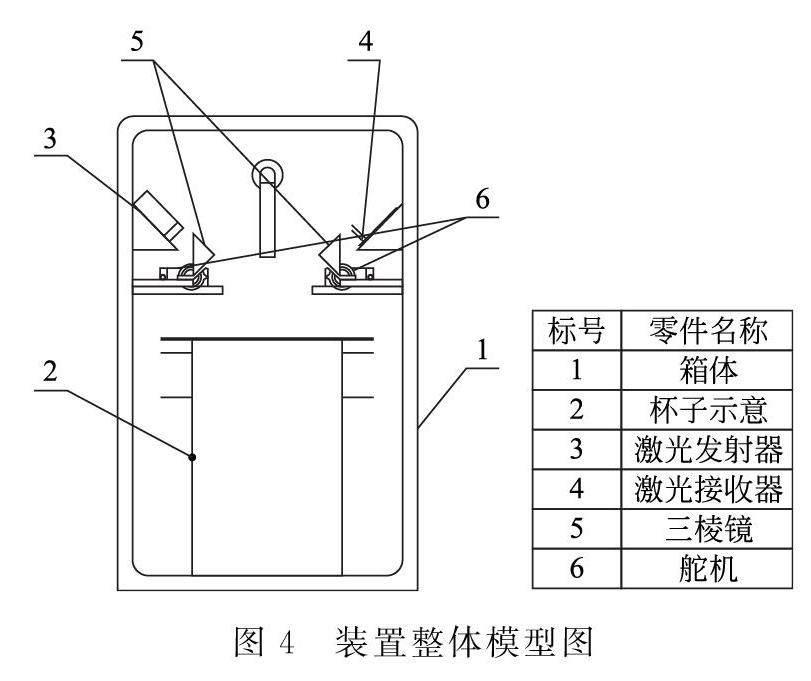
本装置由箱体,2个三棱镜,激光发射和接收器,水泵,PE 管,PG90舵机,继电器模块,尼龙线及5V 电池和各个连接件组成。装置各部分名称如图4所示。
装置后置区域,用来放置供水槽,其内部放水泵,实现供水功能;三棱镜一端由平开铰链连接,另一端连接舵机,通过单片机控制舵机使三棱镜绕铰链转动,两个三棱镜均做此处理。调节左侧三棱镜的角度以改变光的输入方向,将激光光路折射至杯沿下1cm 平面处的杯体中心,通过调节右侧三棱镜角度,可将光路引至固定的激光接收器處,从而实现不同杯型的水位控制功能。装置实物图如图5所示。
4 控制系统设计
4.1 控制板硬件
控制板主要由Arduino UNO 单片机[6]、舵机控制电路、超声波检测和水泵控制电路[7]和激光感应电路组成,控制板硬件设计框图如图6所示,利用Proteus 8 Professional软件[8]对控制部分进行仿真,单片机连接图如图7 所示。ArduinoUNO 是基于ATMEGA328P微处理器的微控制器,其具有14个数字输入/输出引脚,6个模拟输入,16MHz晶振时钟,USB连接,电源插孔,ICSP接头和复位按钮。
舵机控制电路利用单片机控制舵机,实现舵机的固定角度转动。
超声波检测和水泵控制电路由HYSRF05超声波模块,光耦隔离继电器驱动模块组成。当超声波传感器检测到物体距离≤17cm 时(即杯子放到指定位置),单片机连接超声波传感器Echo引脚的pin引脚转化为高电平,控制继电器开关打开,水泵开始注水,实现注水自动化。
激光感应电路由激光接收器,光耦隔离继电器驱动模块组成。当激光接收器接收信号输出高电平时,继电器驱动模块将该电平转化为单片机可以响应的电压,单片机对应引脚转化为高电平,水泵停止注水且之后超声波检测电路不再工作。
需要说明的是当超声波检测和水泵控制电路工作(即水杯放到指定位置)时,激光感应电路才可以工作。
4.2 软件设计
本装置利用Arduino IDE软件进行编程。该软件可以在Windows、Macintosh OS X、Linux三大主流操作系统上运行,而其他的大多数控制器只能在Windows上开发[9,10]。
4.2.1 舵机控制部分
舵机固连在三棱镜上,利用串口驱动单片机使舵机带动三棱镜转动固定角度,实现光路变化。转动角度和杯子高度关系如2.2 节模型推导所示。
4.2.2 水泵控制部分
水泵控制部分程序流程图如图8所示。水杯放到指定位置,超声波传感器感知物体(<17cm),开始注水(继电器2打开,水泵转动);装置通过两个三棱镜的折射和水面反射光路,当水位增加到指定高度时,激光接收器接收信号,停止注水。
5 实验结果与讨论
我们利用实际高度分别为15cm、12cm 和10cm 的三个杯子对装置可行性进行了测试。
5.1 理论计算结果
利用2.2节中的模型,三棱镜折射率n=1.5,三棱镜30°角对应边长e=2cm,L =5cm,大、中、小三种杯型分别为15cm,12cm,10cm,其中大杯杯高为基准高度,故高度差h1=3cm, h2=5cm。
得:α1=68.29°,α2=78.62°。
5.2 实验结果与讨论
对每种杯型进行了6次测试,测试结果如表1所示。
从表1中我们可以看出,测量结果相对测量误差在5%范围内,测量数据准确,该装置可以实现功能。
我们最初实验采用亚克力板作为介质片1和2,所调杯型的高度12~16cm,且需叠加5个介质片;对装置进行优化使用三棱镜,杯型的可调范围为4.5003~14.656cm(理论分析结果如图9所示),显著增加了可调节范围。由于三棱镜体积略大,后续实验可以通过选取折射率更大的材料做折射介质片,增大折射率从而减小介质片厚度,使调节更加方便;或者是在介质1和介质2中镀增反膜或者增透膜等方式,增加折射光光强,即可以减小入射光光强,减小装置功率。
6 结语
本文利用光的反射和折射原理实现了自动注水和不同杯型的水位控制。装置以Arduino为控制中枢,利用舵机控制电路、超声波检测和水泵控制电路组成了控制部分;以激光发射器、三棱镜、激光接收器组成了光路部分。经过不同杯型的测试,装置可以精确识别水杯中的水位到达指定位置,并可以对不同杯型实现自动注水和停止注水,实验中注入杯内的水位与设定的理论水位误差在5%范围内;杯型可调范围在4.5003~14.656cm。该装置有针对性地解决了接水不便,安全隐患等问题,具有成本低、体积小、操作便捷等优点。并且包容性高,与其他功能的控制系统并行,互不干扰,应用市场大,有望大规模投入生产。