基于Simscape航空三级式起动/发电机建模仿真研究
2023-04-26宋勇刚
宋勇刚
(中国飞行试验研究院 航空电子机载设备飞行试验技术研究所,西安 710000)
起动/发电一体化一直是多/全电飞机发展的关键技术,而三级式无刷同步电机是航空电源中被广泛应用的发电机种类,因此如果在现有三级式同步发电机的基础上实现起动功能,将是最为经济的实现起动/发电一体化技术途径,这一技术也被广泛研究[1-6]。对三级式同步电机的起动/发电一体化研究中,仿真技术一直是不可或缺的手段,高效、准确的仿真模型一直是起动/发电技术研究基础,需要处理好旋转整流器(三相整流器)的建模,而三相全波整流器带不同负载情况下的仿真模型实现起来较为复杂。为了简化旋转整流器的建模,主流处理方法仍是将旋转整流器、励磁机的输出和主电机的输入均在电力域中进行仿真。参考文献[7]中首次提出了三级式同步发电机的Matlab/PSB模型,该模型的核心为基于数学模型的同步电机Simulink仿真模型,外层通过电压和电流测量模块实现PSB信号向Simulink模型的传递,利用受控电压源和受控电流源实现Simulink信号向PSB信号的传递,将核心的Simulink模型包装为PSB模型。该方法虽然实现了Simulink内核和PSB外壳之间的信号传递,但受限于受控电流源不能开路的特殊性,模型中还是会多出一些实际中并不存在的阻抗元件[8]。参考文献[9]中,作者利用Matlab/Simscape工具箱完成了对励磁机在 Electrical Domain的建模,实现了对励磁机和旋转整流器的电力域模型统一,但主电机仍然是Simulink模型,不能很好的仿真主电机电枢电流对励磁电流的影响。本文在参考文献[9]的基础上,利用Simscape工具箱建立了励磁机、旋转整流器和主电机的Electrical Domain模型,该模型可工作在起动状态和发电状态,实现起动到发电状态的转换,能够很好地支持起动控制算法的仿真研究。
1 三级式无刷同步电机结构和数学模型
1.1 三级式无刷同步电机结构
航空三级式无刷同步电机由永磁副励磁机、旋转电枢式同步励磁机、旋转整流器和旋转磁极式主电机构成,三级式无刷同步电机结构如图1所示,其中励磁机和主发电机均为凸极同步发电机,区别在于励磁机没有阻尼绕组,而主发电机有阻尼绕组[10]。
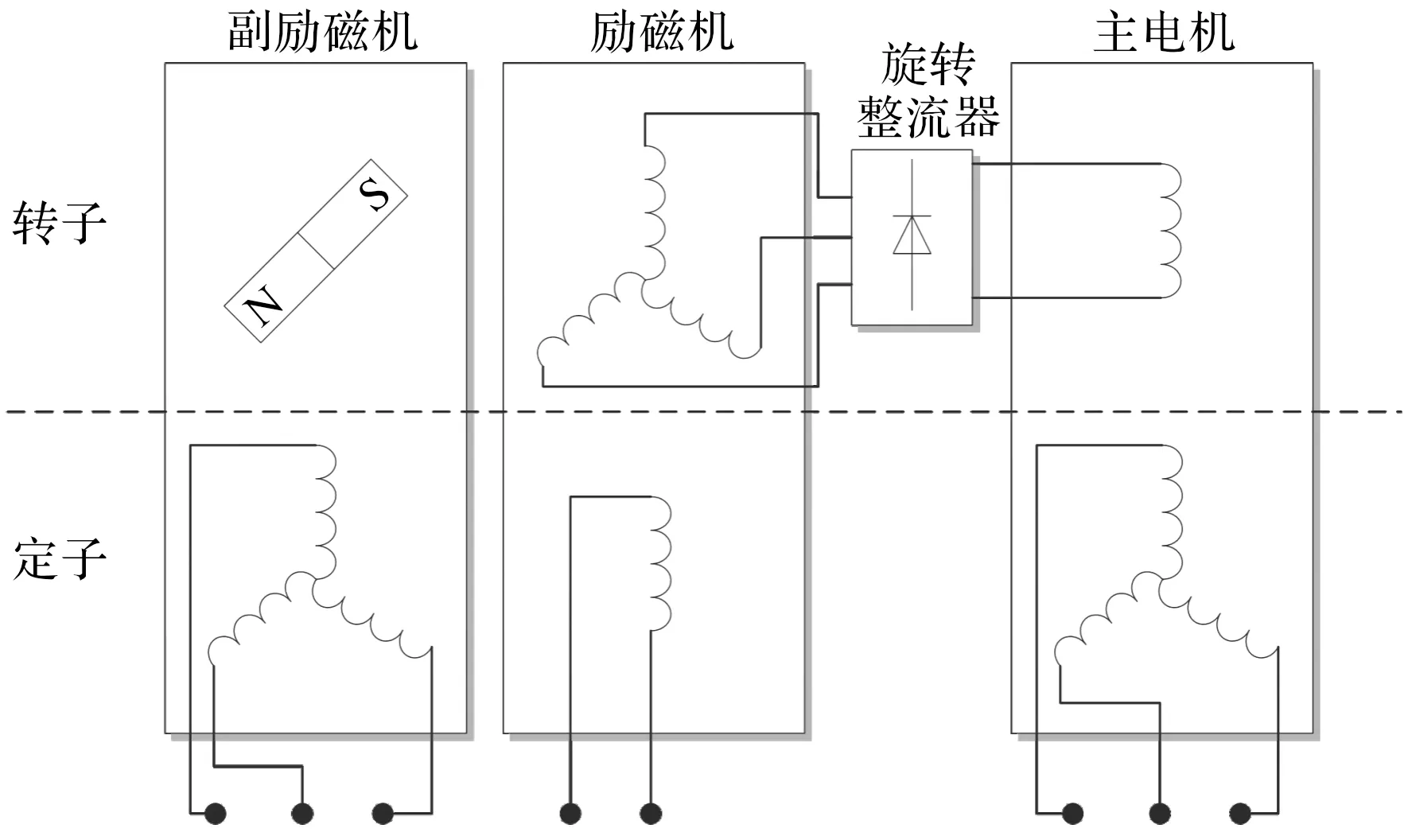
图1 三级式无刷同步电机结构
在发电状态时,副励磁机为励磁机提供励磁,励磁机转子输出的三相交流电经过安装在转子上的不可控整流电路-旋转整流器整流为直流电,为主电机转子励磁绕组提供励磁电压;在起动状态时,副励磁机不参与工作。当电机转速为零(或者转速较低)时,在励磁机励磁绕组施加直流电压无法在转子侧感应出足够的电压为主电机提供励磁,此时必须在励磁机励磁绕组施加交流电,励磁机转子绕组才能感应出交流电,经过旋转整流器后为主电机提供初始励磁。主电机有足够的励磁后,在定子侧施加正确的交流电压,才能够产生足够的电磁转矩,带动发动机转子旋转。
1.2 三级式无刷同步电机数学模型
针对三级式同步电机的仿真研究主要集中在起动过程,且发电过程中副励磁机的工作特性可以简化为受控电压源甚至直流电源,因此本文的仿真建模过程中忽略副励磁机,只针对励磁机和主电机进行建模。励磁机和主电机均为凸极同步电机,带有阻尼绕组的凸极同步电机在d-q旋转坐标系下的理想数学模型(采用电动机惯例)如公式(1)至公式(4)所示[11]。
(1)
(2)
公式(1)为电压方程,公式(2)为磁链方程。对应的电磁转矩方程为:
Te=p0(ψdiq-ψqid)
(3)
在起动过程中,对于主电机还需要机械运动方程:
(4)

2 基于Simscape的航空三级式起动/发电机仿真模型建立
Simscape为Matlab/Simulink中的工具箱,主要是用来完成物理仿真,包含了液压系统、机械系统、模拟/数字电路、电力系统等。与Simulink中的其他工具箱不同,Simscape中信号的传递可以是双向的,这也导致了Simscape中的模块和其他工具箱中的模块不能直接连接,需要使用转换模块。Simscape语言是Simscape中可以支持用户定制特殊仿真模型的语言。利用Simscape语言可以建立Simscape基本库中没有的新元件,它使得物理系统建模更加简单和直观。使用它可以在文本文件中通过参数化、物理连接还有微分方程来定义/描述所需的元件。本文的仿真是在电力系统域即Electrical Domain中进行的。
2.1 主电机Simscape模型建立
当工作在起动状态时,主电机为整个系统提供驱动力——电磁转矩,因此主电机的模型涉及机械运动方程。虽然Simscape支持跨域模型,但考虑到主要关注点在整个系统的电气特性,且机械运动方程较为简单,因此将机械运动部分独立出来,在Simulink中进行建模,而电气部分则在Simscape的Electrical Domain中进行建模。这样也更容易实现从起动到发电状态的转换控制,因为在发电状态,电机输入为从发动机而来的机械转速,无需考虑输入转矩,此状态下可以舍弃机械运动模块。具体Simscape语言描述结构可以参考Matlab官方给出ThreePhaseExamples_lib中Synchronous Machine的源代码。
本文建立的主电机Simscape模型如图2(a)所示。其中Main motor MEC Part为主电机机械运动仿真模块,输入为主电机电磁特性仿真模块sm TSmainSI输出的电磁转矩Te和负载转矩TL,输出为转子机械转速rpm。主电机电磁特性仿真模块输入为转子机械转速SPDrpm、励磁电压fd+和fd-、定子电压ua、ub、uc和n。u_m、i_m和Psiab均为为了监测控制方便而额外输出的定子三相瞬时电压、电流和定子磁链在两相静止坐标系下的分量。
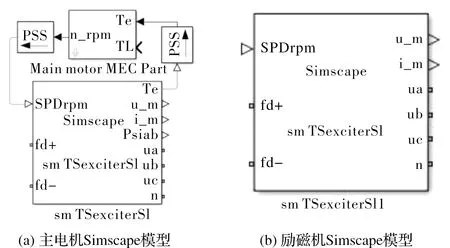
图2 Simscape仿真模型
2.2 励磁机Simscape模型建立
励磁机Simscape模型如图2(b)所示,励磁机模型与主电机模型类似,区别在于模型内部描述中不涉及阻尼绕组,模型不需要机械运动仿真部分,同时不需要输出电磁转矩和磁链Psiab。
2.3 旋转整流器Simscape模型
由于主电机的励磁输入和励磁机的输出均为电力系统域参数,串联其中的旋转整流器直接使用Simscape工具箱中Power Systems/Semiconductors中提供的Rectifier模块,为了测量其输出参数,在外围加入电压和电流测量模块即可。
3 航空三级式起动/发电系统仿真
三级式起动/发电机起动-发电过程仿真模型如图3所示。起动过程采用直接转矩控制(DTC)策略对主电机输出电磁转矩进行控制。DTC策略在定子静止坐标系中直接控制电磁转矩和定子磁链;采用转矩和磁链双滞环控制以获得快速的转矩响应[8],控制方法简单,非常适合起动控制。图3中的 Starter Control模块即为DTC控制模块,其输入为主电机定子三相电流和定子磁链,输出为逆变器控制信号。
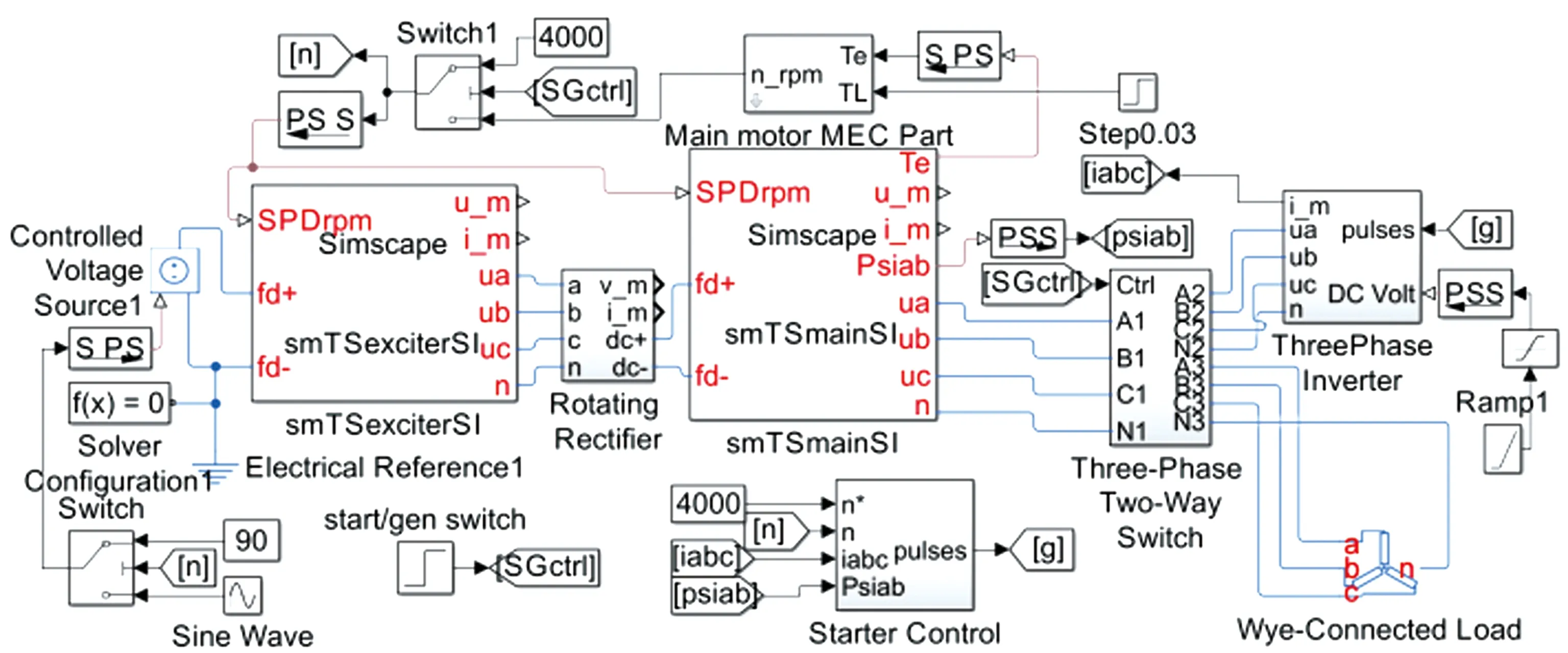
图3 三级式起动/发电机起动-发电过程仿真模型
起动初始阶段用交流电压源对励磁机进行励磁,转速高于500 r·min-1后切换为直流励磁电压,当转速达到4 000 r·min-1并保持稳定后,系统切换为发电状态,直接将励磁机和主发电机的输入转速设定为4 000 r·min-1,并断开电压型逆变器,接入三相负载。为了缩短起动仿真过程,起动过程中的负载转矩设置比较小(TL=10 Nm)。为了减小起动过程中的电流冲击,励磁机励磁绕组内先输入交流电,在0.01 s后,逆变器输入直流电压开始增加,0.015 s时,给定电磁转矩设置为10 Nm并稳步增加,同时施加负载转矩。起动过程中电磁转矩给定增加至 60 Nm后保持恒定。在转速低于3 800 r·min-1之前转速为开环控制,之后转速闭环控制接入,使转速最终稳定在4 000 r·min-1。0.27 s时,切换为发电状态。发电过程中的副励磁机输出用直流电压源代替,为了简化仿真模型,发电过程输出电压未进行闭环稳压控制。
仿真结果如图4至图8所示。图4为主电机转速和电磁转矩变化曲线,可以看出主电机电磁转矩很好地跟随了给定转矩,在起动初始阶段线性增加,因电磁转矩与负载转矩的差异逐渐增大,电机转速变化率也逐渐增加。起动阶段后期电磁转矩保持恒定,此时转速以恒定的速率增加,直到转速达到预设的4 000 r·min-1时,DTC控制策略控制电磁转矩迅速减小至负载转矩值(10 Nm)。在起动状态转换为发电状态后,起动发电系统转速给定为 4 000 r·min-1,此时电磁转矩与发电机所带负载功率相关,电磁转矩变为阻碍电机转动的转矩,因此其值变化为负值。图5为主电机定子磁链变化曲线,结合图4,表明DTC策略能够很好地控制起动阶段的电磁转矩和定子磁链。

图4 主电机转速和电磁转矩变化曲线
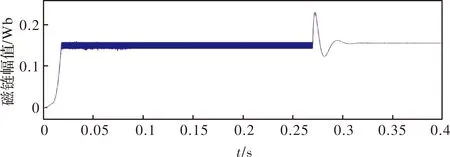
图5 主电机定子磁链变化曲线
图6为主电机定子端电压和电流变化曲线,表明采取励磁机励磁电压先于主电机电枢电压进行施加和主电机电枢电压逐渐增加,均能很好地限制起动初始时刻的主电机定子电流,有利于减小起动冲击。
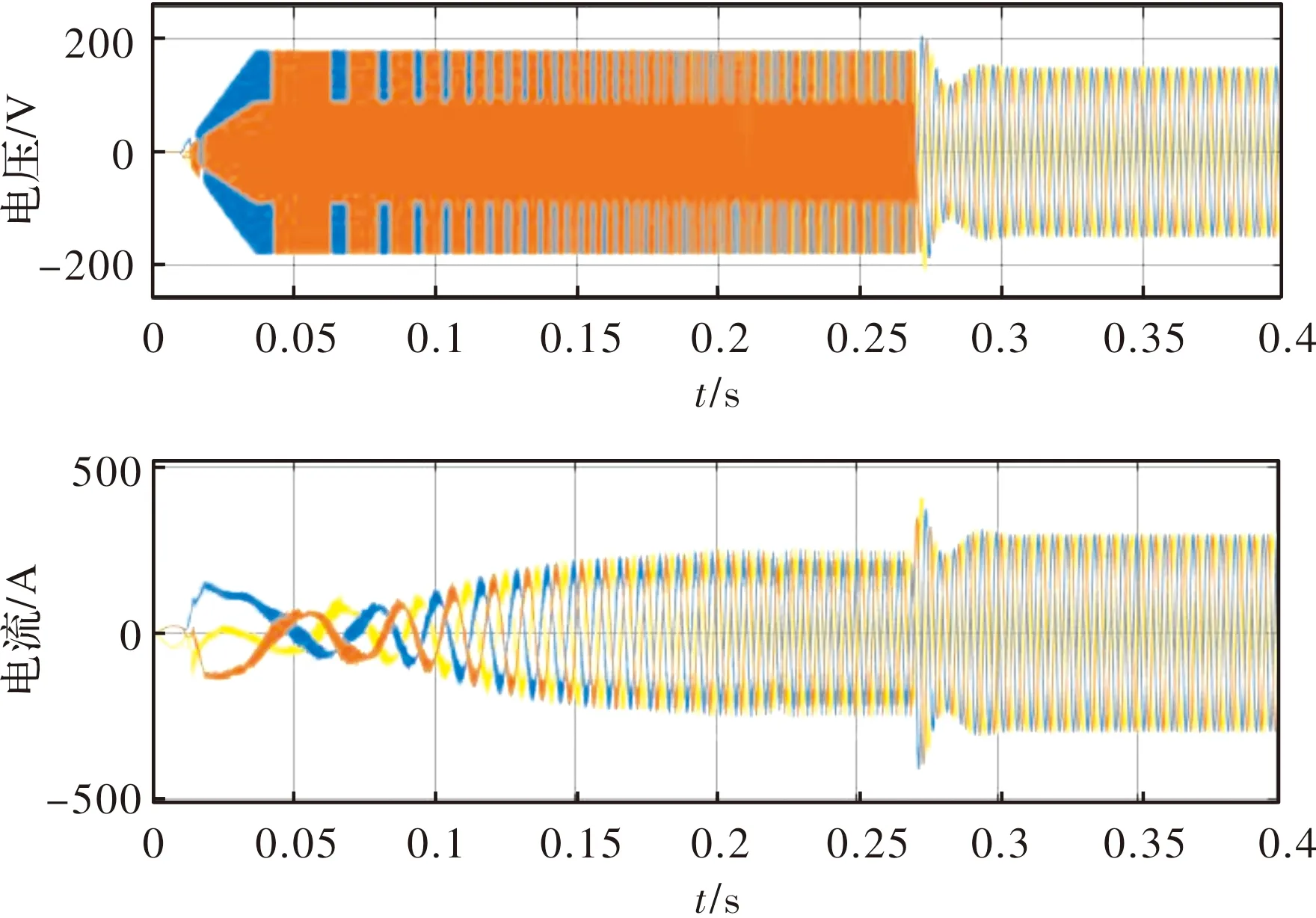
图6 主电机定子端电压和电流变化曲线
图7为励磁机输入励磁电流变化曲线,图8为旋转整流器输出电压和电流变化曲线。可以看到在电机初始转速为零时,采用交流励磁能够在转速为零时为主电机提供初始励磁电流(旋转整流器输出电流),在转速增大后,及时切换为直流励磁,能够保证主电机励磁电流更加平滑的增加。图8中的电压曲线表明本文建模方法能够很好的对整个系统的电气特性进行仿真。
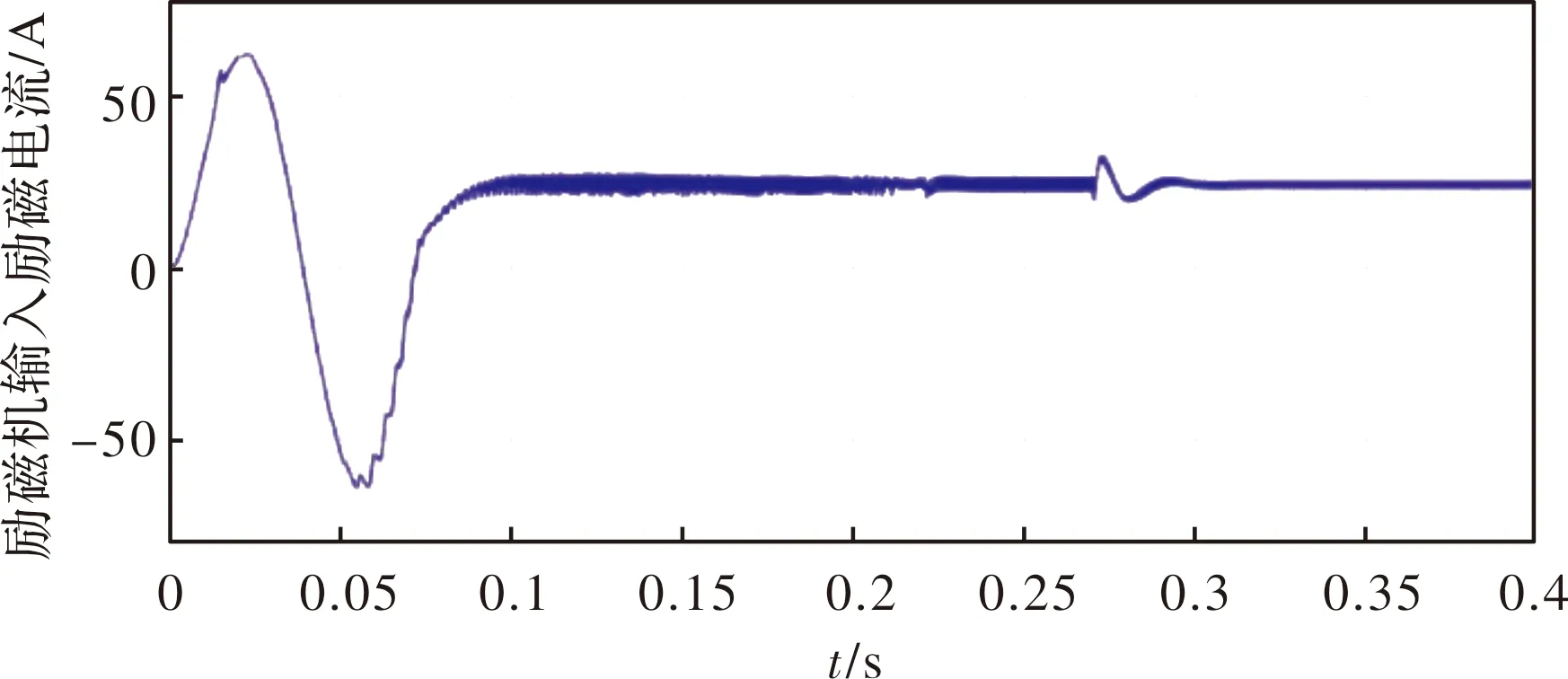
图7 励磁机输入励磁电流变化曲线

图8 旋转整流器输出电压和电流变化曲线
仿真结果表明本文所建立的三级式起动/发电机模型正确,能够支持后续的系统控制策略仿真。
4 结论
在分析研究当前三级式起动发电机建模仿真方法的基础上,提出了基于Simscape电力系统域的三级式起动发电机统一域建模方法,给出了三级式起动发电机从起动到发电过程的仿真系统。仿真结果表明本文提出的建模方法可行、建模结果正确,能够支持针对航空三级式起动/发电系统领域的仿真研究。
