顾及空间分布和NLOS的UWB室内可信定位方法
2023-04-24高周正
高周正,李 岩,陈 琳
(中国地质大学(北京)土地科学技术学院,北京 100083)
0 引言
随着科学技术的快速发展,位置服务在人类社会、经济、军事等领域发挥着越来越重要的作用[1]。位置服务技术根据使用环境可分为室外定位技术、室内定位技术和室内外一体化定位技术。其中,以北斗卫星导航系统(BeiDou navigation satellite system,BDS)、全球定位系统(global positioning system,GPS)、GLONASS和Galileo为代表的全球卫星导航系统(global navigation satellite system,GNSS)具有全球覆盖、全天候、实时、高精度等优势,是提供室外定位、导航和授时(positioning, navigation and timing,PNT)服务的主要手段[2]。然而相关统计结果表明,人日常生活中70%~90%的时间是在室内度过[3]。室内环境下,GNSS因信号受遮挡,难以提供位置服务。为此,部分学者对基于红外线、超声波、蓝牙、Wi-Fi、地磁、惯性传感器等的室内定位技术进行了研究[4]。然而,这些室内定位技术存在传输距离短、信号稳定性差、定位系统复杂、受室内布局影响较大、定位精度低等局限性。此外,现有的室内定位技术主要用于二维平面定位,不能满足新兴行业(如物联网、智能穿戴等)对可信三维定位的迫切需求。
与传统室内定位技术相比,超宽带(ultra-wideband,UWB)以其时间分辨率高、功耗低、穿透力强、测距精度高等优点,正受到室内位置服务领域越来越多的关注[5-8]。常见的UWB定位方式包括信号到达时间(time of arrival,TOA)、到达时间差(time difference of arrival,TDOA)、到达角度(angle of arri-val,AOA)、接收信号强度(received signal strength indication,RSSI)和飞行时间(time of flight,TOF)等[9-10]。其中,TOF因标签与基站、基站与基站之间不需要严格时间同步、硬件实现简单、成本低且定位精度高等优点,具有广泛应用潜力[10]。同时,UWB在室内定位中所具备的强大优势,使其成为全球无缝定位的重要组成部分[11]。
目前,部分学者对UWB定位理论与技术方法进行了深入研究。陈磊等[12]基于最小二乘(least square,LS)和泰勒级数迭代参数估计方法,对基于TOF UWB测距二维平面定位算法进行研究。其利用LS进行全局寻优,并通过阈值筛选和权值级数获得泰勒算法迭代求解的最佳初值,从而提高UWB平面定位精度。基于仿真的静态和动态实验结果表明,该方法的平面定位精度可达10 cm。闫保芳等[13]基于LS和扩展卡尔曼滤波(extended Kalman filter,EKF)对不同室内环境采集的TOF UWB测距数据进行处理。实测结果表明,在存在非视距(non-line of sight,NLOS)误差的环境下,室内平面定位精度为1 m,非NLOS环境下,定位精度优于0.2 m。这些研究主要基于UWB进行二维平面定位,但当前实际应用对三维位置的需求越来越迫切。因此,部分学者对UWB三维定位技术展开了研究。李鹏等[8]综合利用模拟退火算法和粒子滤波辅助Chan算法实现UWB三维定位。仿真和实测TDOA UWB数据结果表明,LOS条件下可实现10~20 cm定位精度,NLOS条件下可实现优于60 cm的定位精度。吕鹏博等[14]采用LS拟合法对TOF UWB距离数据进行处理,实测结果表明,其定位精度优于40 cm。董佳琪等[15]将间接平差与卡尔曼滤波进行融合,以提高基于双边测距的UWB定位精度。仿真数据与实测结果表明,在10 cm测距误差的仿真实验中,该算法的三维定位精度优于9 cm,实地实验中该算法的点位误差为5.4 cm。
虽然当前学者对UWB不同定位技术和参数估计方法进行了较为深入的研究,但缺少对UWB定位结果可信度的评估策略的研究。为此,本文在前人研究的基础上,初步给出了一种顾及UWB基站空间分布和NLOS信号的UWB三维可信定位方法。同时,基于抗差理论的无迹卡尔曼滤波(unscented Kalman filter,UKF),对30 cm噪声的仿真UWB数据和实测TOF UWB测距数据进行处理,评估和分析本文室内可信定位方案的有效性。
1 UWB可信定位理论模型
TOF UWB通过标签与基站相互通信实现测距,其基本观测方程可表示为[16]
(1)
其中,dj(j=1,2,…,m)表示标签到第j个基站的距离值;(x,y,z)和(xj,yj,zj)分别表示标签和基站的坐标。
1.1 抗差UKF UWB定位模型
经典的KF适用于线性系统[17],当状态方程或观测方程为非线性变换时,常采用EKF[18]。EKF的核心思想是将非线性函数在滤波值处进行泰勒展开,并忽略二次及以上项。该过程中,只保留了一次项系数,舍弃的高次项会引入截断误差,特别是对于UWB这种小范围的定位方法来讲,该误差对定位精度的影响将十分显著。为此,本文提出了采用UKF算法,通过无迹变换(unscented transformation,UT)对非线性系统的后验概率密度函数进行近似,从而计算状态向量的均值和协方差,避免线性化的截断误差[19]。
UKF的函数模型可表示为[19]
(2)
其中,x和z分别表示状态向量和新息向量;f(xk-1)和h(xk)分别表示非线性状态方程和非线性观测方程;wk和vk分别表示k时刻状态噪声向量和测量噪声向量。

(3)

UWB的非线性观测方程为
(4)

(5)
(6)

基于式(5)中的2n+1个Sigma样本点和状态方程(3),计算预测状态向量及方差协方差
(7)
基于式(7)中的信息,再次进行UT
(8)
将式(8)代入非线性观测方程(4),预测k+1时刻的观测信息及其方差协方差
(9)
(10)
基于式(8)、式(9)和式(10),可实现当前时刻状态更新及方差协方差更新
(11)
(12)
然而,由于UWB观测值中常存在NLOS信号,使得受NLOS污染后的UWB距离值定位精度严重降低。为此,本文在UKF中引入IGG-III抗差理论模型[17],以削弱异常观测的影响,提高了参数估计的精度和滤波的可靠性。
抗差UKF(robust UKF,RUKF)通过等价方差阵替换经验误差方差阵,减弱异常UWB观测值对参数估计的影响[17],即
(13)
式中,γ为方差膨胀因子,可表示为
(14)

1.2 UWB定位可信度评估模型
评估定位结果精度通常采用内符合精度和外符合精度两种方案,其模型可分别表示为
(15)
(16)

然而,如式(15)所示的内符合精度是基于观测残差、观测值先验权和几何强度因子(position dilution of precision,PDOP),白噪声条件下其结果尚且理想,复杂条件下容易受观测粗差的影响,实际应用中难以准确在线反映实际定位结果的可信度。如式(16)所示的外符合精度,则需要通过与真值进行比对才能得出,无法实时在线应用。为此,针对UWB定位本身特性,设计了一种顾及基站空间分布强度、密度和NLOS误差的UWB定位结果实时可信度在线评估模型
σk=σLOS·ζDOP,k·κGEO·χ
(17)
(18)
式中,σLOS、ζDOP,k、κGEO和χ分别表示不受NLOS影响的单位权中误差、UWB工作区域平均DOP(k=NDOP、EDOP和VDOP)、当前时刻空间几何强度奇异阻抗因子和基站空间分布密度再平衡因子;mNLOS和vLOS分别表示由IGG-III探测出来的NLOS基站数和不含NLOS的观测残差向量;Θs表示基于当前标签位置的不同象限基站数,s=0、1、2、3、4分别表示理想条件下各象限平均基站数和第一、二、三、四象限基站数。
1.3 UWB可信定位算法框架
根据上述模型,本文UWB可信定位算法架构可通过图1简单表示。首先,利用8个LinkTrack P基站(有效测距范围500 m,www.nooploop.com),采集各基站至标签的距离;然后,基于Bancroft算法[20]和迭代LS对UKF进行坐标初始化;在此基础上,进行UKF状态更新和观测更新;同时,利用IGG-III抗差理论对可能存在的NLOS观测值进行识别探测;基于以上计算结果与过程信息,结合式(15)、式(16)和式(17)分别给出UKF的内符合精度、外符合精度和可信度方案评估精度。

图1 UWB可信定位算法基本架构图Fig.1 Algorithm structure of UWB credible positioning
2 实验与结果分析
为验证本文的UWB定位方法,分别采用实测数据和仿真数据对其进行综合分析。实验设备除LinkTrack P外,还采用了M40 GNSS/惯性导航系统(inertial navigation system,INS)组合导航系统、莱卡全站仪等设备(见图2)。其中,M40的GNSS和INS数据用于提供RTK(real-time kinematic)/INS紧组合结果,用作参考真值。莱卡全站仪用于测定8个UWB基站坐标(见表1)。实测数据采集时,利用布设在中国地质大学(北京)西操场跑道附近(见图2)的8个基站,围绕跑道采集4 000个观测历元动态实测UWB数据。本次实验中,标签离基站最远距离为164 m、最近为3 m。为增加NLOS误差,实验过程中,数位实验参与人员不定期地从各基站旁边经过。在仿真实验中,基于实测实验的8个基站和区域中心点坐标,在真实距离的基础上,仿真仅加入均值为0.0 m、标准差为0.3 m的高斯分布白噪声,无NLOS噪声,仿真4 000个观测历元UWB静态数据。

图2 UWB定位实验设计与部分实验设备Fig.2 Design of UWB positioning and part of the used equipment

表1 实验中的UWB基站坐标Tab.1 Coordinates of UWB base stations used in test
为了对比,分别采用迭代LS和RUKF两种参数估计方法进行数据处理;在实测数据中,为进一步分析非线性化误差和抗差模型的影响,另引入了抗差迭代LS(RLS)的结果。精度评定分别采用内符合精度、外符合精度和可信度三种方案。
2.1 区域几何精度因子与NLOS分析
由于仿真数据中仅加入了高斯白噪声,这里以实测数据为例,分析整个UWB定位区域的几何精度因子和NLOS误差情况。由图3测试区水平精度因子(horizontal dilution of precision,HDOP)和垂直精度因子(vertical dilution of precision,VDOP)分布情况可知,因基站布设在高程差异较小的平面上,测试轨迹区域UWB平面几何强度(0.7~0.8)是垂向(11~25)的近30倍,这是引起UWB平面定位精度远优于高程的决定性原因,这也是大部分学者目前只研究UWB平面定位的原因。此外,从图4的残差分布可以看出,实验设备的噪声基本在0.3 m以内,然而动态实验中存在明显的 NLOS误差。

(a) HDOP

(b) VDOP图3 测试区HDOP和VDOP分布情况Fig.3 Distribution of HDOP and VDOP around the test field

图4 实测和仿真UWB数据LS和RUKF残差Fig.4 Residuals of LS and RUKF for measured/simulated UWB data
2.2 仿真数据结果分析
由于仿真数据中无NLOS误差,因此没有进行RLS解算。图5所示为迭代LS和RUKF计算的平面散点图和位置误差时间序列图。据此可知,1)迭代LS和UKF的计算结果均表明UWB平面位置精度(cm级)远优于高程精度(m级),由于是静态数据(没有基站空间分布密度的影响)且没有加入NLOS误差,因此这种差异是由空间几何强度因子引起的,该结论与2.1节中的理论分析一致;2)由于没有加入NLOS误差,因此式(14)中抗差模型不会被激活,迭代LS结果与RUKF的差异是由线性化误差引起的,这也证明在UWB这类局部区域的距离交汇定位技术中,线性化误差是显著的,引入UKF是必要的。这种线性化误差对定位精度的影响在图6所示累积分布函数(cumulative distribution function,CDF)曲线中表现得更为明显和直观,即UKF平面精度100%优于5 cm,高程100%优于3 m;而与之对应的LS结果则分别为27 cm和4.8 m。

图5 LS和RUKF点位误差序列Fig.5 Position errors calculated from LS and RUKF
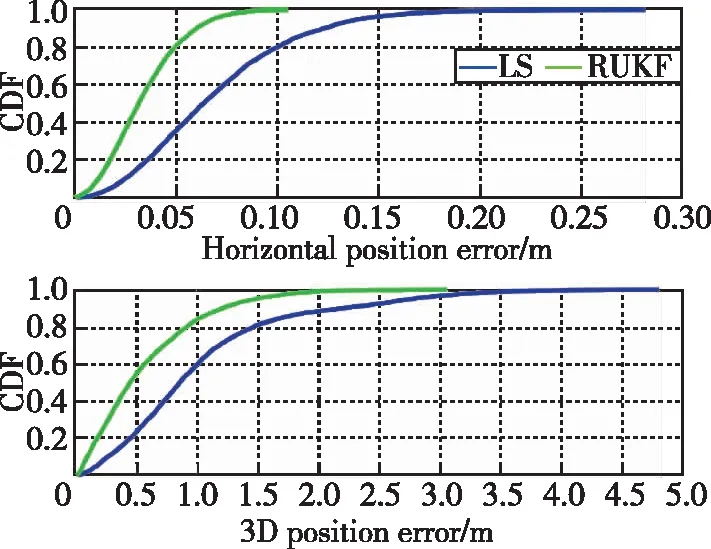
图6 LS和RUKF位置误差CDF曲线Fig.6 Position CDF calculated from LS and RUKF
两种参数估计方法的平面和高程统计结果(均方根误差(root mean square error,RMSE)和平均误差)如图7所示,基于迭代LS的水平和高程RMSE分别为8 cm和1.3 m,平均误差为7 cm和1.0 m;而基于UKF的水平和高程RMSE分别为4 cm和0.7 m,平均误差为3 cm和0.6 m。非线性化误差对定位RMSE的影响为46.2%~50.0%,对平均误差的影响为40.0%~57.1%。

图7 仿真数据平面和三维统计结果Fig.7 Statistics result for horizontal and 3D position errors
在此基础上,以外符合精度(Real error)为参考,分别对UKF UWB定位的内符合精度(Sigma)和可信度(Credible)进行分析(图中分别给了2条±Sigma曲线和2条±Credible曲线,用于直观表征精度指标对真实误差的包裹情况)。如图8所示,在仿真数据中,内符合精度指标Sigma和可信度指标Credible均能较好地评估平面精度,甚至内符合精度指标Sigma更接近外符合精度Real error。但在高程方向,内符合精度Sigma要显著差些(在正误差部分,大部分内符合精度指标Sigma比外符合精度Real error值小,即无法正确评估此时结果的可信度)。然而,得益于式(18)中的空间几何强度奇异阻抗因子,基于本文的可信度方案给出的可信度(Credible)指标在平面和高程均能较好地表征UWB定位结果的可信度。这表明,即使在理想的白噪声条件下,本文的方案亦能有效评估UWB定位精度。

图8 静态仿真数据RUKF内符合精度(Sigma)、外符合精度(Real error)和可信度(Credible)Fig.8 Compliance accuracy of Sigma, Real error, and Credible for static simulated UWB data RUKF
2.3 实测数据结果分析
基于实际采集的受NLOS影响的UWB动态数据的定位结果如图9所示,RUKF在定位精度改善方面的优势亦非常显著,特别是在高程方向。对应的CDF曲线和统计结果如图10和图11所示,非线性化误差和NLOS误差在平面上对两种参数估计方法的定位精度影响较小,RMSE统计值均为0.3 m。平均误差(0.3 m和0.2 m)的差异主要由抗差模型引起,当均采用RLS和RUKF时,平面定位精度无差异,即非线性化误差对UWB平面精度的影响可以忽略。迭代LS、RLS和RUKF的三维RMSE分别为3.6 m、3.2 m和2.5 m,即抗差理论和非线性化误差的影响分别为11.1%和21.9%,二者耦合后的影响为30.5%。与仿真实验类似,动态UWB实测平面精度亦远优于高程精度,这种差异在采用迭代LS解算时更明显。与静态仿真结果相比,动态实测UWB在平面和三维的定位精度均存在显著降低,这种差异是NLOS误差、非线性化误差和UWB设备随机噪声的耦合,这可以结合图4中的观测残差和图9中的定位误差序列分析得出。

图9 LS、RLS和RUKF动态点位误差序列Fig.9 Dynamic position errors calculated from LS, RLS, and RUKF

图10 LS、RLS和RUKF动态位置误差CDF曲线Fig.10 Dynamic position error CDF calculated from LS, RLS, and RUKF

图11 动态数据平面和三维统计结果Fig.11 Statistics result for horizontal and 3D dynamic position errors
图12所示为动态实测UWB定位中的内符合精度、外符合精度和可信度计算结果(图中分别给了2条±Sigma曲线和2条±Credible曲线,用于直观表征精度指标对真实误差的包裹情况)。可以看出,由于实际UWB观测值受NLOS误差和观测随机噪声的影响,使得基于高斯白噪声假设的内符合精度评估指标(Sigma)难以准确评估实际定位误差(Real error),而是给出过于理想化的精度指标,从而不能很好地反映实际定位精度。这种不符现象,在动态应用中变化的非线性化误差和DOP奇异的耦合扰动影响下更加明显。而本文综合顾及NLOS误差、测站几何分布、测站空间分布密度的可信度指标(Credible),分别利用IGG-III抗差理论、空间几何强度奇异阻抗因子和基站空间分布密度再平衡因子削弱NLOS、DOP异常和测站空间分布密度不均衡的影响,从而较为实时准确地预测各历元的定位精度,且与外符合定位误差(Real error)具有较高的精度一致性和误差变化趋势一致性。其中,这种变化趋势一致性(对比图12中的绿色曲线和黑色点),在历元1~1 000、1 500附近、2 200附近、2 600附近、3 200附近以及3 500~4 000表现得尤为明显。

图12 实测UWB数据UKF内符合精度(Sigma)、外符合精度(Real error)和可信度(Credible)Fig.12 Compliance accuracy of Sigma, Real error, andCredible for dynamic test UWB data
3 结论
针对传统UWB定位算法中的非线性化误差、非视距误差和结果精度在线可信评估等问题,本文提出了基于IGG-III抗差理论的UKF UWB三维定位方法和顾及UWB基站空间分布的结果精度可信评估方法,给出了详细的理论模型,并分别基于仿真数据和实测数据对其进行了综合分析验证。结果表明,1)在只存在白噪声影响的条件下,非线性化误差对UWB定位精度的影响超过40%;2)在NLOS条件下,非线性化误差对UWB定位精度的影响接近22%,NLOS对定位精度的影响接近11%;3)本文给出的可信度计算模型在仿真静态实验和实测动态实验中均可较好地实时评估UWB定位精度,该方法表现出了一定的实用价值。然而,该方法对于不同测距精度的UWB设备、不同UWB基站构型等场景下的泛化能力尚需进一步研究。
