北斗高精度高可信PPP-RTK服务基本框架
2023-04-24李子申王宁波王志宇
李子申,王宁波,李 亮,王志宇
(1. 中国科学院空天信息创新研究院,北京 100094;2.齐鲁空天信息研究院,济南 250132;3. 哈尔滨工程大学,哈尔滨 150001)
0 引言
2020年7月31日,北斗三号全球卫星导航系统正式开通,标志着北斗系统进入全球化发展新阶段,也标志着我国定位、导航与授时(positioning naviga-tion and timing,PNT)体系朝着更加泛在、智能与可信的方向发展。总体上看,我国PNT体系的建设与发展,首先从以多源传感器融合为主的综合PNT[1]发展至软硬件弹性化集成与优化的弹性PNT[2];进而发展为将专家共性知识库转换为计算机知识图谱的智能PNT[2-3];最终,实现面向用户规定和隐性需求,并不断提升PNT相关服务系统有效性、完好性、安全性及保障性的可信PNT。其中,高精度高可信PPP-RTK(precise point positioning-real time kinem-atic)技术是实现可信PNT的重要基础[4]。
高精度定位技术自全球定位系统(global position-ing system,GPS)诞生之初便是卫星导航定位领域的研究与应用热点。随着应用需求的不断发展,卫星导航高精度定位技术也历经了多代更新与发展,形成了包括实时差分动态定位(RTK)[5]、精密单点定位(PPP和PPP-AR)[6-7]、基于参考站网的实时动态定位(网络RTK)[8]以及PPP-RTK等在内的高精度定位技术[9],以上各定位技术的特点如表1所示。现阶段,各类少人化与无人化装备的精准导航和控制,均主要依赖卫星导航高精度位置信息。目前,地基网络RTK技术基本能够满足小区域范围内的高精度应用需求,但受参考站密度和双向通信安全等多重因素制约,现有以网络RTK为主的技术体系难以适用于未来无人化场景下的规模化应用需求[10]。特别是对于陆上无人农场、海上海洋牧场等多类应用场景与服务对象,亟需形成统一的精准定位服务平台,提供无缝高效的高精度定位服务。在此条件下,PPP-RTK的技术优势日渐突出,并由区域高精度向广域高精度高可信方向不断深入发展[11]。

表1 现有主流高精度定位技术对比分析Tab.1 Comparative analysis of current mainstream high-precision positioning technologies
少人/无人化场景下精准导航与控制作业中,精准定位的可信性保障不可或缺。针对卫星导航高精度定位的可信性监测,可参考经典的完好性监测理论与方法[12]。其相关技术体系及标准起源于民用航空领域[13],大致经历了从单频单系统的接收机自主完好性监测(receiver autonomous integrity monitoring,RAIM)[14]发展至多频多系统联合的高级接收机自主完好性监测(advanced receiver autonomous integrity monitoring,ARAIM)[15-16];从广域增强、可信性服务等级较低的星基增强系统(satellite-based augmenta-tion system,SBAS)[17]发展至局域增强、可信性服务等级较高的陆基增强系统(ground-based augmen-tation systems,GBAS)[18]。同时,可信性监测技术经历了从单故障监测到多故障联合监测,从终端自主到服务端与用户端协同,对风险源的控制从单边置信度到误警与漏检双重检验的发展过程。对比来看,目前主流的卫星导航定位可信性监测技术,均是面向米级与亚米级伪距增强定位需求提出的,难以满足以载波相位和状态域改正信息为核心的PPP-RTK高可信监测需求[19]。
随着卫星导航的应用领域逐渐向自动驾驶、无人农场及智能牧场等领域拓展,用户对高精度与高可信的需求同步提升,高精度与高可信集成的卫星导航定位技术将是卫星导航领域的发展趋势[20]。在高精度PPP-RTK的基础上,本文提出了高精度高可信PPP-RTK概念,即: PPP-RTK系统端与用户端精准定位性能超出告警极限及时告警的能力,融合精确性(accuracy)、完好性(integrity)、连续性(continuity)以及可用性(availability)等多项指标,综合表征PPP-RTK服务的用户可信赖程度。
1 高可信PPP-RTK基本框架
PPP-RTK技术是近几年才兴起的一种高精度定位手段,目前国内外基于载波相位层级的高精度定位研究主要围绕PPP-RTK技术体系开展[9]。PPP-RTK技术融合了PPP广域覆盖和RTK/RTD快速收敛的特点,通过布设全球稀疏观测站和局域稠密观测站,生成卫星精密轨道、精密钟差、精密信号偏差、空间电离层及空间对流层参数等改正信息,以状态域表达方式播发给用户,为用户提供厘米级差分定位服务[21]。相比传统的PPP/PPP-AR技术,PPP-RTK增加了空间电离层和对流层精密改正信息的播发,大大加快了终端用户高精度定位的收敛速度[22];相比网络RTK技术,PPP-RTK改正信息以状态域参数的形式表达,对影响定位的各类风险源进行矢量化与精细化处理,扩大了高精度定位的服务范围,并对定位结果的可信性具有分析预判的能力[23-24]。
与民航广泛采用的卫星导航定位技术相比,PPP-RTK技术在基础理论、技术体系及风险源处理策略等方面均存在较大差异[25]。民航GBAS等基于伪距差分设计的完好性监测技术并不适配PPP-RTK技术体系[23],因此,本文设计了面向载波相位层级的北斗/GNSS PPP-RTK“云-边-端”多重风险源可信监测总体技术方案,如图1所示。

图1 北斗/GNSS PPP-RTK“云-边-端”全链条风险源可信监测技术方案Fig.1 Credible monitoring technology scheme for risk sources across the cloud-edge-end of BDS PPP-RTK full chain
其中,“云端”风险源可信监测主要是对卫星精密轨道、精密钟差、码偏差、相位偏差及空间大气精密信息等改正产品进行可信概率分布与信号解构编码的监测[26];“边端”风险源可信监测主要是依托北斗/GNSS区域加密站,对计算的区域电离层与对流层产品进行空间大气活动异常监测;“终端”风险源可信监测主要是针对用户终端[27],开展多源融合应用为主的用户端定位风险自主监测[28]。
2 高可信PPP-RTK核心技术思路
按照高可信PPP-RTK“云-边-端”服务框架设计,高可信PPP-RTK核心技术主要包括以下几个方面:1)多重风险源可信概率分配体系;2)PPP-RTK改正产品概率域可信监测及预警技术;3)可信监测服务信息的参数表达及播发策略;4)用户终端多源融合自主可信监测方法。
2.1 面向“云-边-端”多重风险源的可信概率分配体系
针对北斗/GNSS PPP-RTK可信服务多重风险源权威指标体系缺乏以及风险源统筹监测可用性难以保障等问题,在充分了解“云-边-端”所有潜在风险源的基础上,构建基于北斗/GNSS PPP-RTK “云-边-端”可信监测故障树模型,设计多重风险源并发态势下可信概率分配调整方案,以提升高精度高可信服务的可用性,建立标准化PPP-RTK可信监测技术指标体系。
PPP-RTK定位故障源的确定是建立可信概率分配体系的基础。研究PPP-RTK“信号采集-数据处理-通信播发-终端定位”导航定位全过程,对各类可能诱发定位故障的风险源进行集中梳理,构建了北斗/GNSS PPP-RTK“云-边-端”可信监测故障树模型,如图2所示。

图2 北斗/GNSS PPP-RTK“云-边-端”可信监测故障树模型示意图Fig.2 Fault tree model for credible monitoring of BDS PPP-RTK across cloud-edge-end
在可信监测技术指标方面,目前尚无面向北斗/GNSS PPP-RTK的可信监测权威技术指标。为建立标准化PPP-RTK可信监测技术指标体系,在充分认识PPP-RTK故障源的基础上,研究PPP-RTK多重风险源可信概率分配方法,深入分析各项风险源的内在机理和影响机制,进而全面把握多重风险源的可信概率控制水平。
2.2 北斗/GNSS PPP-RTK改正产品概率域可信监测及预警技术
改正信息的可信性是保障无人系统安全作业的关键。传统定位域可信性监测基于各类风险源精确已知的先验故障概率、可信性风险及连续性风险等技术指标,在定位域构建保护水平,开展可信检验。PPP-RTK的可信监测对象是状态域改正参数,基于定位域的可信监测方法难以适用于PPP-RTK服务体系。因此,研究PPP-RTK各类状态域改正信息在观测量层面的误差传播规律,构建状态域参数的相关检验统计量;在此基础上开展卫星轨钟与空间大气相互免疫的序贯监测,进行改正信息可信监测风险控制,计算各类改正信息误差达到最大告警极限的危险误导信息概率;根据多类型用户不同等级可信监测的控制要求,实现PPP-RTK各类改正信息可信的严密监测。北斗/GNSS PPP-RTK改正信息概率域可信监测技术流程如图3所示。
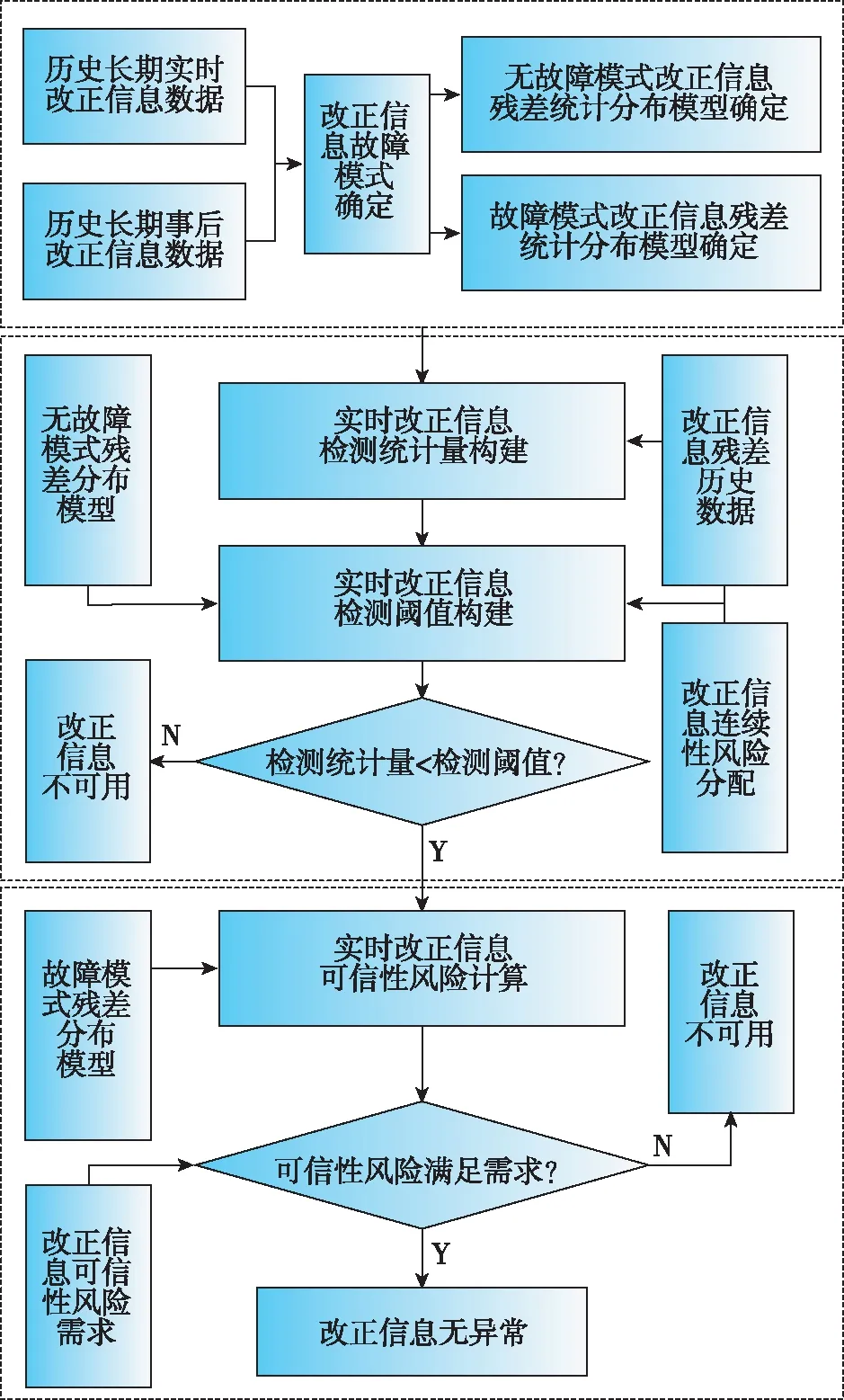
图3 PPP-RTK改正信息概率域可信监测技术流程图Fig.3 PPP-RTK correction information probabilistic domain credible monitoring technology flowchart
针对卫星轨钟、卫星偏差及空间大气之间的误差耦合特性,提取风险源误差去耦合后的改正信息残差,并基于历史长期、大量改正信息残差样本数据,分析不同故障模式下不同改正信息的误差统计分布特性。
针对卫星轨钟以及对流层等频率无关改正信息的可信性监测,在提取卫星轨钟改正信息残差的过程中,对流层干分量延迟通过建模控制,卫星轨钟误差用改正信息修正,将消电离层整周模糊度、接收机钟差及对流层湿分量作为待估参数进行估计;在提取对流层改正信息残差时,对流层延迟不再作为待估参数,改为用对流层改正信息进行修正,其他风险源控制方式与卫星轨钟改正信息一致。通过几何无关组合抑制与卫星和接收机相关的风险源,利用电离层和卫星几何无关偏差改正信息修正电离层延迟误差和几何无关卫星偏差,将几何无关组合整周模糊度和接收机偏差作为待估参数进行求解;最后通过几何无关组合观测量和各项待估参数、修正风险源之间的差和,提取电离层改正信息残差[29-30]。在完成改正信息残差提取后,根据历史长期改正信息残差样本统计分布和方差-协方差获取改正信息误差传播规律,以及无故障模式和故障模式下改正信息残差统计分布特性,设定预期代价函数,选取适配的统计分布模型对改正信息残差进行建模表征,作为改正信息可信监测无故障假设和故障假设下的概率分布模型。
改正信息可信监测风险控制主要包含误警错误约束和漏检错误约束。其中,改正信息误警错误约束主要保障无故障模式下高可信服务对不同应用场景下改正信息的误警率控制需求。根据无故障模式下假设的改正信息残差统计分布模型以及服务平台对不同应用场景下改正信息的误警率需求,求取改正信息检测阈值。通过比较改正信息检测统计量与检测阈值,判断是否需要对当前改正信息告警。顾及不同改正信息误差相互耦合以及改正信息可信监测效率,在本文中采取序贯监测方案,即首先对卫星轨钟改正信息进行可信监测,然后再监测对流层改正信息,最后监测电离层改正信息。
改正信息可信监测的漏检错误约束主要保障改正信息超出告警极限及时告警的能力。传统定位域可信监测漏检率约束通过分配的可信风险概率要求构建保护水平,与告警限值比较实现漏检错误的检验。由于目前尚无面向北斗/GNSS PPP-RTK应用场景的权威可信指标及分配体系,本文采用概率域可信监测方法实现改正信息可信监测漏检错误的约束。针对不同卫星不同改正信息可信风险求和获取总体改正信息可信性风险,并与服务平台需求的改正信息可信性风险进行比对,从而判断总体改正信息可信性风险能否满足云端改正信息的可信监测要求,并解决可信性风险分配体系缺乏的问题。
2.3 可信监测服务信息的参数表达及播发策略
可信监测服务表达与编码播发是实现北斗高精度高可信时空服务的关键环节。北斗高精度高可信时空服务表达主要针对多站信号接收环境差异导致的改正信息对应观测残差服从非零均值与非标称高斯分布等问题,开展非高斯改正信息残差高斯化包络补偿方法的研究,夯实可信监测质量标识高斯分布理论假设基础,保障复杂应用场景下时空信息的高精度与高可信。针对现有PPP-RTK信息播发编码协议未能兼容完备可信性监测信息的问题,重点围绕可信服务信息开展解构与重编码工作;面向多用户多任务场景的应用需求,形成分级播发精准可信的改正产品,提高北斗/GNSS PPP-RTK高可信服务效能。可信监测服务信息的参数表达及播发包含两个主要的技术环节:一是可信监测服务信息的生成与表达方法;二是可信监测信息的编码及播发方法。
(1)可信监测服务信息生成与表达方法
由于北斗/GNSS PPP-RTK改正产品误差在空-时维度上的相关性以及统计样本数量的限制,改正产品残差分布可能存在非零均值、截断、多峰等多种非标称高斯分布特征。利用传统零均值高斯包络方法需要较大的膨胀系数以包络改正信息残差非高斯特征,将导致改正信息质量标识可用性急剧降低,可信监测产品的可用性难以保障。
针对此,本文提出了基于最优保护水平的对偶包络参数优化方法,实现对实时改正信息残差的有偏包络,保障PPP-RTK改正产品的可用性;并通过对比优化后包络参数与传统对偶包络参数的包络边界以验证算法的有效性。首先,分析非零均值、截断、多峰等对统计特征精度描述的要求,调节时间滑动窗口,采集实时改正信息残差与历史数据;在此基础上,构建单峰包络累积分布函数(cumulative distribution function,CDF),实现改正产品残差的单峰对称包络。通过高斯对偶CDF双边包络单峰以及包络统计特征生成相应改正信息偏差与质量标识,实现可信改正产品残差在有偏条件下可信服务信息的再表达,由此补偿改正信息的非高斯特性,降低标准差膨胀系数,提高可信服务的可用性。
(2)可信监测信息编码及播发方法
可信监测信息编码及播发主要分为可信监测服务数据解构重编码以及分级服务信息播发策略两部分,技术路线如图 4所示。通过开展可信监测服务表达、解构编码与播发方法研究,标定PPP-RTK改正产品可信信息,保障PPP-RTK高精度高可信服务的连续性和一致性,实现改正产品的分级播发,提高北斗/GNSS PPP-RTK高精度高可信产品信息的服务性能。

图4 可信服务信息解构编码与播发技术路线Fig.4 Technical route of credible service information deconstruction, encoding and broadcasting
由于北斗/GNSS PPP-RTK高可信服务缺乏标准的编码和播发协议,以及偏远山区、海洋等区域通信资源严重受限等问题,导致北斗/GNSS PPP-RTK定位精度和连续性受到制约。为此,将现有高精度与高可信参数根据编码协议进行整合优化生成紧凑格式的精准可信产品,实现可信服务数据增强。针对多任务场景的不同导航性能需求,设计PPP、PPP-AR和PPP-RTK产品分级播发策略,并根据改正信息的后验质量监测,对异常改正信息单独追加可用性告警标识,以满足可信监测服务及时告警时间的要求。
2.4 用户终端多源融合自主可信监测方法
从保障多源传感器融合的用户端导航定位服务的精度、完好性、连续性和可用性角度出发,分别研究:1)构建多源导航自适应动态重构技术,最大限度保障导航的连续性;2)基于多重假设解分离准则和自主完好性监测外推的多源融合系统完好性监测技术,保障多源融合系统的完好性;3)构建异源异构导航传感器故障树模型,以系统级故障检测性能最优实现多重风险源的完好性风险和连续性风险优化分配,保障多源融合系统服务的可用性。用户端可信监测技术框架如图5所示。

图5 多源融合定位可信监测技术框架Fig.5 Technical framework of credible monitoring for multi-source fusion positioning
3 总结与展望
北斗高精度高可信定位已成为未来5~10年的发展趋势,北斗/GNSS PPP-RTK精准可信定位技术是无人装备实现精准、可靠、连续作业的前提。在推动数字经济发展的进程中,高精度和高可信相互依存,一方面,高精度是实现多重风险源并发态势下北斗/GNSS PPP-RTK高可信监测的基础;另一方面,高可信是实现北斗/GNSS高精度时空信息无人化应用的先决条件。目前,高可信包含并依赖北斗等GNSS本身的完好性,并在此基础上朝着精细化、矢量化、载波相位层级以及终端与服务端协同的方向拓展。高可信技术除本文提到的数据处理之外,还涉及信号异常、信号干扰以及通信链路等方面内容,仍需要深入研究。
