鸭式布局火箭滚转特性试验研究
2023-04-20李晓晖
李晓晖,惠 钰,郑 佩,杨 军
(西安航天动力技术研究所,陕西 西安 710025)
0 引言
鸭式气动布局以其响应特性快、升阻比大、舵面效率高、结构紧凑、可靠性高等优点,成为了战术导弹和火箭广泛采用的一种气动布局形式。但鸭舵在差动偏转进行滚转控制情况下,舵面将产生非对称的下洗气流,该气流将直接作用在尾翼上,在尾翼上诱导出非对称的气动力和力矩。该诱导作用体现在两方面:一方面是产生与鸭舵滚转控制力矩相反附加滚转力矩,导致鸭舵滚控失效或反效[1-2];另一方面将产生附加的侧向力与力矩,从而对偏航方向的气动特性造成一定影响[3]。
文中首先分析了当前鸭式布局火箭的滚转控制方案的技术特点,其次以某鸭式布局简控火箭为研究对象,开展了滚转控制的风洞试验研究,结合数据分析提出了尾翼固定条件下利用鸭舵实施滚转通道控制的方法,并最终通过飞行试验验证了该方法的可行性。
1 鸭舵滚转控制的技术分析
由于鸭舵与尾翼滚转耦合作用的存在,鸭舵滚转控制力矩和尾翼上诱导的反向滚转力矩的大小,将随着火箭外形参数和飞行参数的变化而变化,从而在某些飞行状态下出现鸭舵滚控失效或反效[1-2],如图1所示,其中mx为对模型轴线的滚转力矩系数。基于此原因,一般认为在固定尾翼条件下鸭舵难以有效实施滚转控制。
图1 鸭舵滚转力矩的反效特性Fig.1 Reaction characteristics of canard rolling moment
针对鸭式布局难以实施滚转控制的缺点,国内外的科研工作者提出了多种改进方案并成功实现了基于鸭舵的弹箭滚转通道的稳定控制。典型的改进方案有:
方案1,鸭舵只进行俯仰与偏航两通道控制,在尾翼后缘增加副翼进行滚转通道的控制。该方案优点是俯仰、偏航与滚转通道相互独立,避免了鸭舵差动与尾翼的耦合现象,实施简单;缺点是需额外增加副翼驱动机构,带来产品成本增加。
方案2,采用空气冲压装置,在尾翼的翼尖处,分别装上冲压式圆形进气道,通过阀门,冲压空气被从尾冀面上喷射出来,相当于一个二次引射装置。在翼面上可以形成不同方向和大小的控制力矩。即形成一个新的滚控系统。但是该方案结构复杂,应用较少。
方案3,采用环形尾翼,环形尾翼在其环形翼面上的压力指向箭体轴心,不可能产生滚转力矩,因此可大幅减小诱导的反向滚转力矩。但该布局翼面结构复杂、纵向性能差、阻力较大。
方案4,采用“T”形尾翼,在常规尾翼稍部增加垂直小翼形成“T”形翼,该布局在改变原有尾翼纵向性能的条件下,大幅减弱了诱导的滚转力矩,从而提升了鸭舵的滚转控制效能。但该布局形式在增加翼面结构复杂度的同时也带来了全箭阻力的增加。
方案5,采用自由滚转尾翼,该布局形式尾翼在鸭舵非对称流场的作用下可绕箭体轴线自由旋转,从而不在尾翼上形成诱导滚转力矩,同时其对纵向性能和阻力的影响很小。但由于尾舱内部需安装滚转轴承,因此在增加结构复杂度的同时也造成了结构重量的增加。
综上分析,以上方案无论是增加新的滚控系统(方案1、方案2),还是改变尾翼形式(方案3、方案4)降低诱导滚转力矩,或是尾翼/鸭舵气动解耦(方案5)去除诱导滚转力矩,都不同程度上增加了结构复杂度,带来额外的成本增加。
因此有必要对鸭舵滚转特性进行深入研究与分析,掌握滚转舵效的变化规律,以在不改变现有气动外形的基础上,寻求新的鸭舵滚控的解决方案。
2 滚转特性试验及结果分析
2.1 试验模型及方法
以某“+—+”形鸭式布局的火箭为研究对象,开展鸭舵滚转单项风洞试验,气动外形见图2。

图2 气动外形Fig.2 Aerodynamic configurations
试验在FD-06风洞进行,试验模型由头部、圆柱中段和带4片稳定尾翼的尾部组成,头部安装4片鸭舵,可对火箭进行俯仰、偏航和滚转控制,风洞试验模型见图3。试验攻角范围-10°~+10°,试验马赫数范围0.5~4.0,滚转舵偏角取0°,±2°、±5°。试验中尾翼可选择自由旋转或固定。

图3 风洞试验模型Fig.3 The model of wind tunnel test
2.2 试验结果分析
试验中mx为对模型轴线的滚转力矩系数,my为相对模型顶点的偏航力矩系数,mz为相对模型顶点的俯仰力矩系数,δx为滚转舵偏角,舵偏角和试验坐标系的定义如图4所示。
图4 坐标系与滚转舵偏角定义(顺气流方向)Fig.4 Definition of coordinate system and rolling rudder deflection angle(downstream direction)
2.2.1 滚转特性分析
为验证试验方法的正确性,开展了不同马赫数下滚转力矩系数的对比试验。滚转舵偏5°和2°条件下的滚转力矩系数试验曲线如图5、图6所示。
图5 滚转舵偏5°条件下滚转力矩系数Fig.5 Rolling moment coefficient of 5 degrees rolling rudder deflection
可见该鸭式火箭滚转控制特性的试验结果与文献[2]、文献[4]的结果一致,随试验马赫数的增加,滚转舵偏产生的滚转力矩系数呈现先增加后减小的趋势,且在马赫数小于2~3之间某一值时,滚转力矩系数出现反效现象。另外对比图5和图6可见,随着滚转舵偏角的增加,滚转力矩系数呈增加趋势。
为对比尾翼对舵面滚转特性的影响,分别在马赫数1.5和马赫数3.0(滚转舵偏5°)条件下进行了尾翼滚转和尾翼固定两种情况的对比试验,如图7和图8所示。
图7 马赫数1.5条件下滚转力矩系数Fig.7 Rolling moment coefficient of Mach number 1.5

图8 马赫数3.0条件下滚转力矩系数Fig.8 Rolling moment coefficient of Mach number 3.0
在马赫数1.5条件下,尾翼固定时火箭的滚转力矩系数mx为正值,即出现滚转反效现象;尾翼滚转时火箭滚转力矩系数为负值,可进行滚转控制。
在马赫数3.0条件下,尾翼滚转和尾翼固定条件下,火箭的滚转力矩系数mx均为负值。同时由于尾翼滚转避免了诱导滚转力矩,尾翼滚转条件下的滚转力矩系数值mx明显大于尾翼固定条件下的值,因此采用自由滚转尾翼时可提升鸭舵的滚转控制效率。
2.2.2 滚转舵偏对偏航力矩的影响分析
对鸭式布局固定尾翼火箭而言,滚转舵偏与攻角的耦合作用,使得在箭体两侧出现非对称的洗流作用,从而使得火箭左右压力不等,从而导致出现了附加的偏航力矩,见图9和图10,其中δ为滚转舵偏角α为攻角。
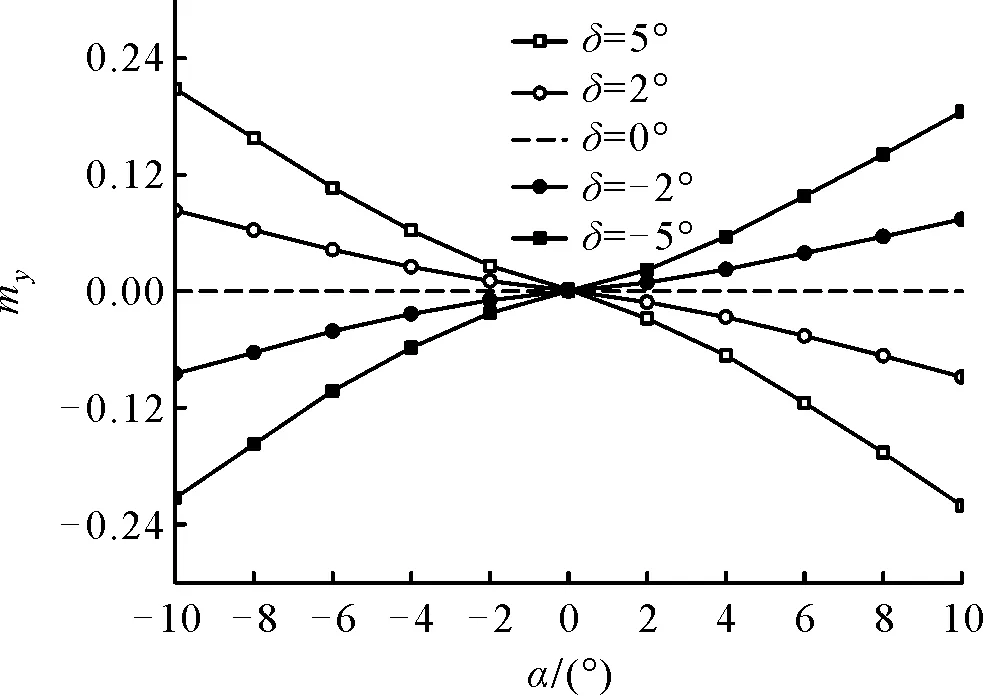
图9 马赫数1.5条件下偏航力矩系数Fig.9 Yaw moment coefficient of Mach number 1.5
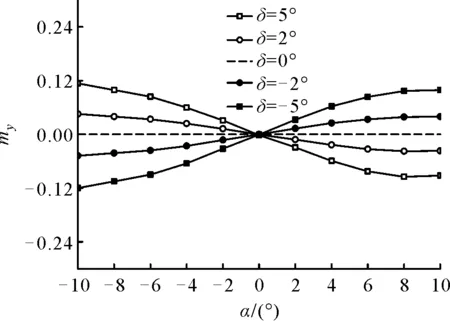
图10 马赫数3.0条件下偏航力矩系数Fig.10 Yaw moment coefficient of Mach number 3.0
由图8、图9可见,在零攻角条件下,滚转舵偏不产生附加偏航力矩;正攻角条件下,负滚转舵偏产生正偏航力矩,正滚转舵偏产生负偏航力矩;偏航力矩数值随攻角和滚转舵偏角绝对值的增加而增加,但在小攻角(±4°范围内),偏航力矩维持在一个较小的量值。
2.2.3 滚转舵偏对俯仰力矩的影响分析
同样,由于滚转舵偏与攻角的耦合作用,使得箭体两侧舵面局部攻角不同,从而产生附加俯仰力矩,见图11和图12。由图,滚转舵偏产生的附加俯仰力矩整体属于小量,约占附加偏航力矩的1/10。
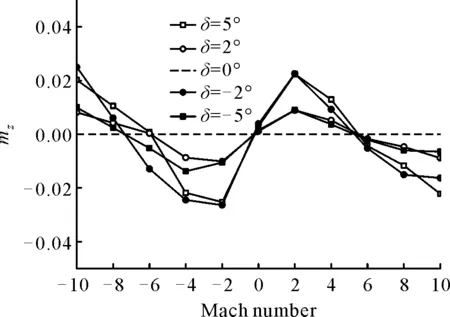
图11 马赫数1.5条件下俯仰力矩系数Fig.11 Pitch moment coefficient of Mach number 1.5

图12 马赫数3.0条件下俯仰力矩系数Fig.12 Pitch moment coefficient of Mach number 3.0
3 鸭舵滚控方案及飞行验证
3.1 固定尾翼鸭舵滚控方案
不同攻角条件下,5°滚转舵偏的滚转力矩系数试验值参见图13。由图13可见,在试验马赫数小于2.0~3.0之间某一值时,滚转力矩系数mx为正值,表现为滚转反效;但在马赫数大于该值后,滚转力矩系数为负值,可用于进行火箭滚转通道控制。
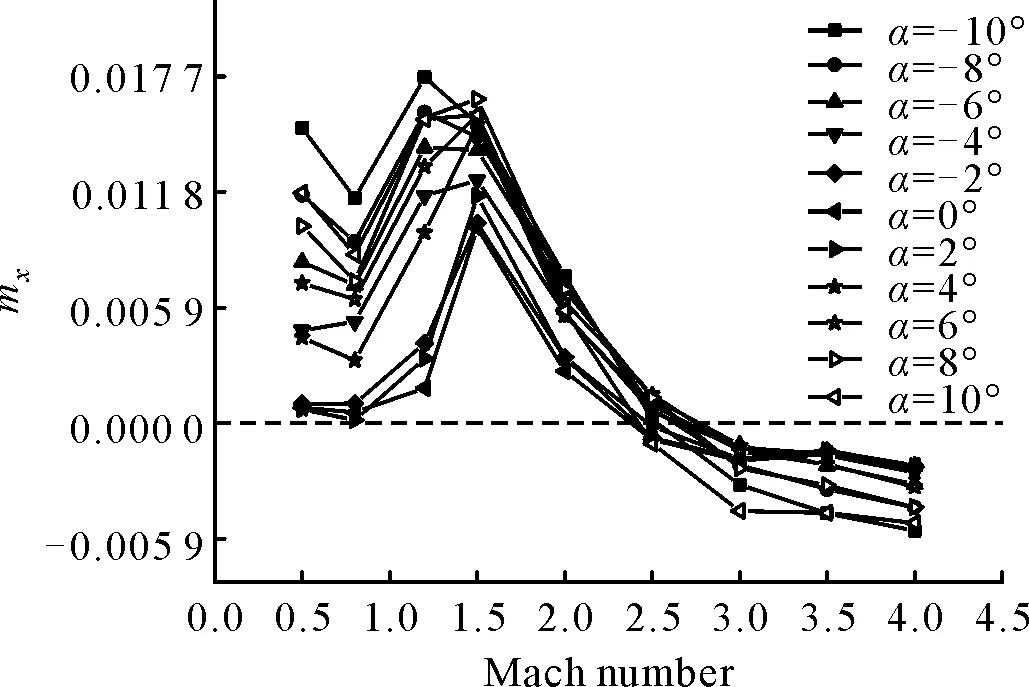
图13 马赫数3.0条件下俯仰力矩系数Fig.13 Rolling moment coefficient of 5 degrees rolling rudder deflection
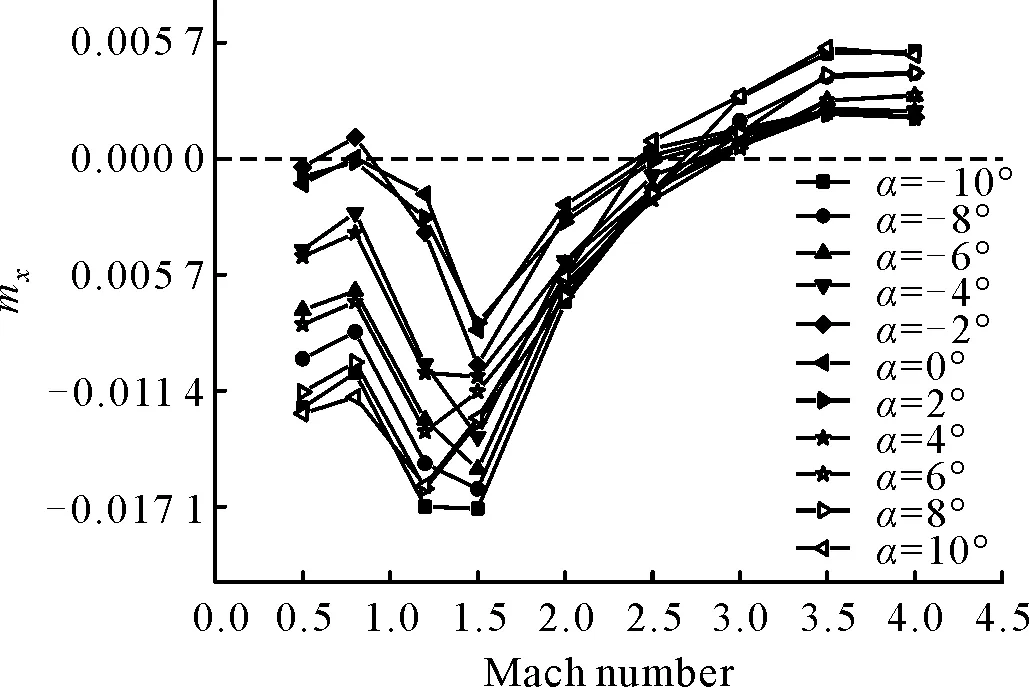
图14 滚转舵偏-5°条件下滚转力矩系数Fig.14 Rolling moment coefficient of -5 degrees rolling rudder deflection
由于滚转舵偏将产生附加的偏航力矩,需要额外的偏航舵偏来平衡,为此将附加偏航力矩和偏航舵偏产生的偏航力矩进行转化,得到对质心的偏航力矩系数myg曲线,如图15和图16所示。
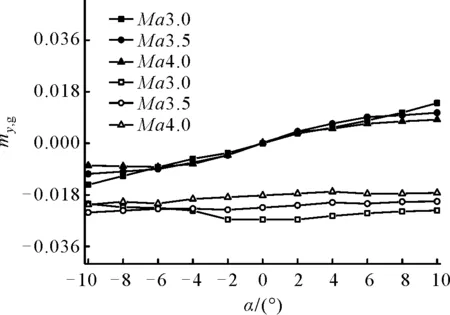
图16 滚转舵偏-5°条件下偏航力矩系数Fig.16 Yaw moment coefficient of -5 degrees rolling rudder deflection
图15、图16中实心图标数据为滚转舵偏产生的附加偏航力矩系数,空心图标则为偏航舵效。由图中数据可知,对文中火箭方案,需要最大付出0.58°的偏航舵偏来平衡滚转舵偏产生的附加偏航力矩。
滚转舵偏引起的对质心的附加俯仰力矩和俯仰舵偏产生的相对质心的俯仰力矩系数mz,g对比曲线如图17和图18所示。
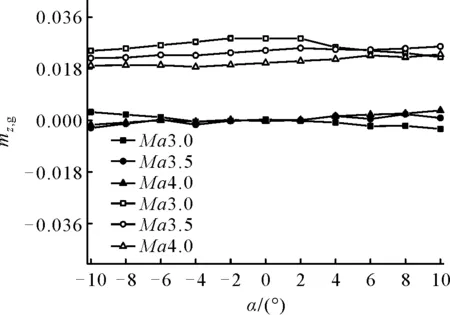
图17 滚转舵偏5°条件下俯仰力矩系数Fig.17 Pitch moment coefficient of 5 degrees rolling rudder deflection
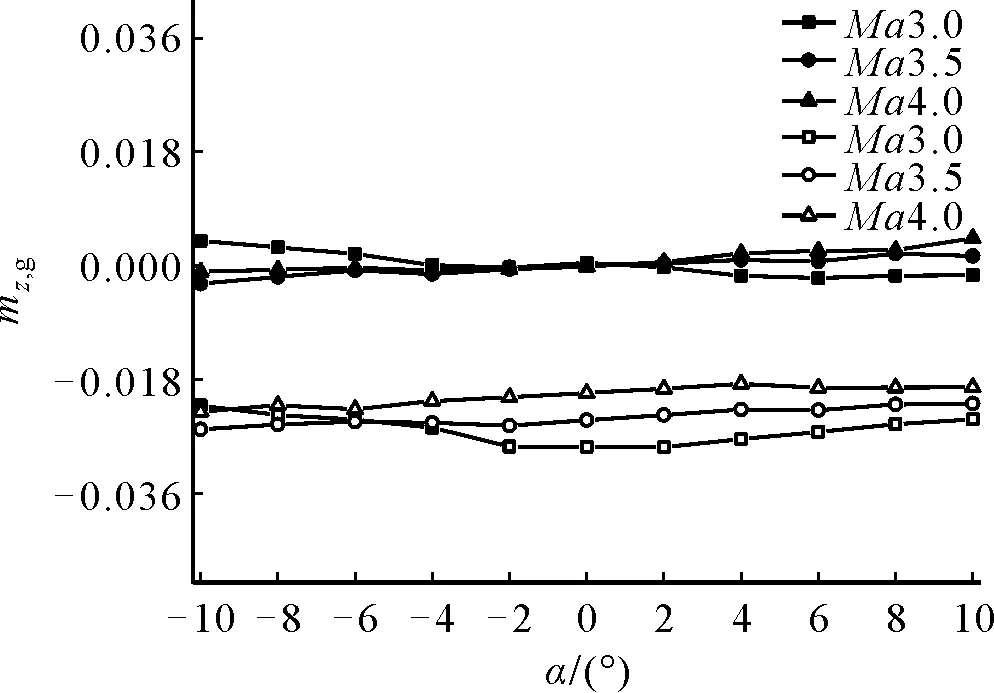
图18 滚转舵偏-5°条件下俯仰力矩系数Fig.18 Pitch moment coefficient of -5 degrees rolling rudder deflection
图中实心图标数据为滚转舵偏产生的附加俯仰力矩系数,空心图标则为俯仰舵效,可见对文中火箭方案,滚转舵偏产生的附加俯仰力矩为小量,几乎不会对俯仰舵效造成影响。
综上分析,针对鸭式布局固定尾翼火箭可采用如下滚控方案:结合滚转舵效随马赫数的变化曲线,找到滚转正效的马赫数范围,在该范围内利用鸭舵实施滚转控制,但需预留一定的偏航与俯仰舵偏来平衡滚控带来的附加力矩影响。
3.2 飞行试验验证
在滚转控制方案的基础上,开展滚转控制的飞行验证工作。选定某单级鸭式布局火箭在保证发动机状态、外形、质量一致的情况下,开展滚转控制对比试验。该火箭发动机工作时间为16 s、飞行马赫数范围0~4.5。
图19为滚转无控状态,在翼面安装偏差和离架扰动的作用下,火箭的滚转角速度呈现先正向增加,达到峰值后逐渐减小至负向峰值,随后在阻尼力矩和干扰力矩的共同作用下,逐步平衡至64°/s左右。
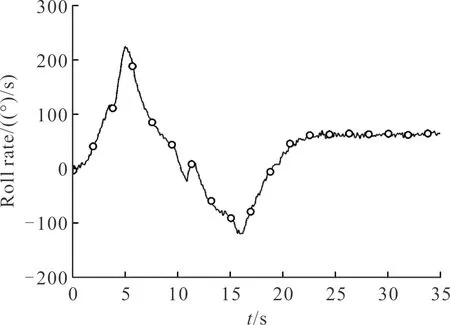
图19 滚转控制验证飞行试验(滚转无控)Fig.19 Rolling control flight test(no rolling control)
图20为滚转有控状态,鸭舵对滚转通道的控制时间为13~33 s(Ma>3.0),控制目标为滚转角速度稳定至0°/s。由图20中曲线可知,在滚转控制介入前,火箭的滚转角速度变化与无控状态一致,在翼面安装偏差和离架扰动的作用下,火箭的滚转角速度逐步增加至正向峰值,之后逐步减小;在13 s时滚转控制介入,火箭的滚转角速度很快稳定至0°/s附近,可见文中确定的滚转控制方案可行。
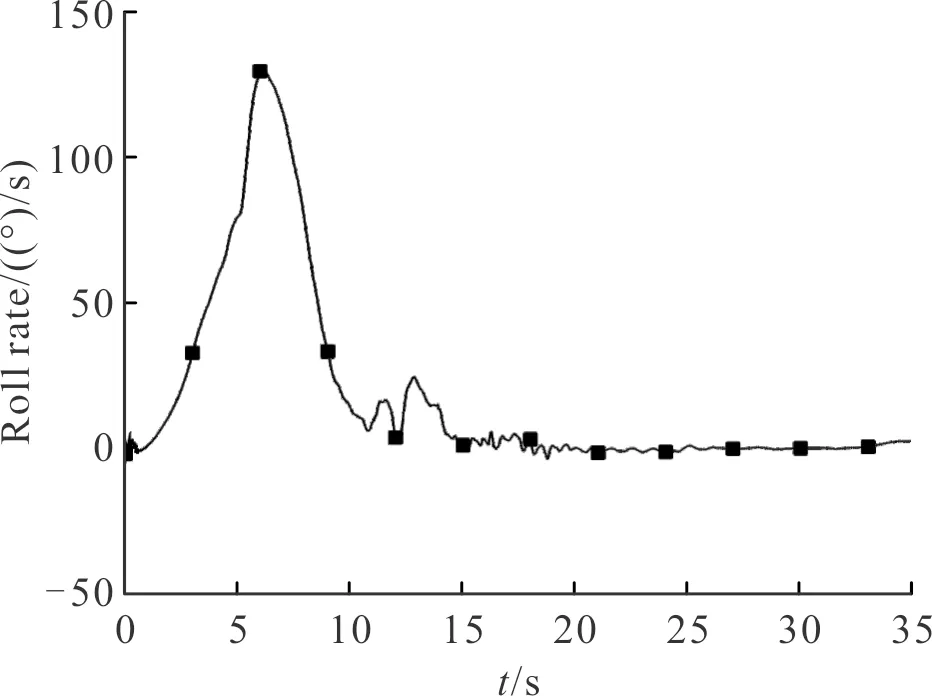
图20 滚转控制验证飞行试验(滚转有控)Fig.20 Rolling control flight test(rolling controlled)
4 结论
综合文中的研究分析结果,可得以下结论:
1)滚转舵效存在的反效现象,是鸭式布局火箭在尾翼固定条件下难以实施有效滚转控制的直接原因。
2)鸭式布局火箭存在滚转舵偏角时,会在俯仰和偏航通道带来附加的干扰力矩。
3)随飞行马赫数的增加,鸭式布局火箭的滚转舵效存在一个正效点马赫数,即飞行马赫数大于该正效点马赫数后,滚转舵效即转为正常。
4)在鸭式布局火箭滚转正效的马赫数范围内,预留一定的偏航与俯仰舵偏来平衡滚控带来的附加力矩影响后,可利用鸭舵进行有效的滚转控制。
