基于改进布谷鸟搜索优化RBF神经网络的抽油机故障诊断
2023-04-14李博文宋文广徐加军
李博文,宋文广,徐加军
(1.长江大学 计算机科学学院,湖北 荆州 434023; 2.中石化胜利油田分公司胜利采油厂,山东 东营 257000)
目前,油田逐渐走向数字化,抽油机常被应用于偏远野外地区进行采油工作。油田环境复杂多变、恶劣,且井下存在诸多不明因素,造成抽油机故障,导致采油效率低下,浪费人力和物力资源,增加采油成本,甚至可能引发安全事故。因此,抽油机工况高效率、高精度的诊断,对于保障油田采油率及安全生产具有重大的意义。
国内外普遍采用示功图分析法、专家系统诊断法、计算机诊断法及神经网络诊断法[1]。陈妍等[2]的研究表明,井下示功图分析法操作较为复杂,地面示功图分析法过于依赖于理论,专家系统诊断法运用专业知识和经验也存在不稳定性。张仙伟等[3]的研究表明,采用计算机诊断法处理抽油机碰泵等故障,仍需根据人工经验判断,效率不高。王琼[4]经研究发现,随着神经网络诊断法的发展,其无须依赖人工经验,在消耗少量资源的情况下,综合分析抽油机工况数据,就能完成故障诊断。Zhou等[5]使用UKF-RBF模型研制智能油田故障诊断系统,在多故障分类上有较好的效果,但计算雅可比矩阵易产生线性化误差,导致最终结果与实际存在偏差。徐通等[6]使用PSO-RBF 模型研制智能油田故障诊断系统,检测精度达到90%以上,但粒子群算法易早熟陷入局部最优,导致最终结果与实际存在偏差。
径向基函数(radial basis function,RBF)神经网络的优势为可自主寻求数据中心,结构相较于反向传播(back propagation,BP)神经网络等更简单,同时硬件要求低[7-8]。为提高RBF 的训练速度,解决其易陷入局部最优的问题,可优化RBF 以取得更好的效果。目前,被应用较为广泛的有粒子群搜索(particle swarm optimization,PSO)、遗传算法(genetic algorithm,GA)和布谷鸟搜索(cuckoo search,CS)等。文献[9-10]表明,PSO 易早熟,GA操作复杂,CS 的健壮性和寻优能力在多峰值优化上更强。但CS在迭代后期易出现在全局最优值附近震荡的缺陷及缺乏活力的现象。因此,提出引入动态发现概率和自适应步长来解决CS 的不足,然后优化RBF,最后诊断抽油机故障,在加速训练速度的同时,提高诊断的精度。
1 抽油机故障诊断模型设计
1.1 RBF神经网络
RBF神经网络总体结构由网络输入层、网络隐含层及网络输出层[11]3 部分组成。RBF 的输出表达式如下:
式中:x为输入特征;p为输入特征数量;yj为输出层的第j个神经元的输出;δi为与第i个神经元相关的宽度参数;ci为与第i个神经元关联的中心;w为隐含层到输出层的连接权值;h为总神经元数量。
因此RBF 神经网络模型的效果受中心点、宽度及连接权值影响,可通过使用改进的CS 算法来优化目标参数。
1.2 改进布谷鸟搜索算法
布谷鸟搜索算法存在收敛速度慢、后期缺乏活力的不足之处。为弥补其缺陷,提高其性能,本文引入动态发现概率和自适应步长因子进行优化。CS 算法模拟自然界中布谷鸟通过借其他鸟类的巢穴寄生鸟蛋的习性,寻求最优解。受布谷鸟寄生的宿主发现,蛋异常的概率设定为pa,pa∈[0,1]。基于以上规则,布谷鸟通过Levy 飞行寻宿主的鸟巢位置,其表达式如下:
式中:为第i个鸟巢在第t轮迭代的位置;α为步长因子;L(λ)为Levy随机搜索路径[12-13]。
L(λ)的表达式如下:
式中:u∼N(0,σ2),v∼N(0,1),u、v为服从正态分布的随机数;为第b个鸟巢在第t轮迭代中最优异的鸟巢位置。
鸟巢的位置更新后,生成随机数r∈[0,1]。当r>pa时,再次随机更新鸟巢位置。
通过整体对CS 算法进行分析,当发现概率pa保持不变时,无论鸟巢优劣,均会以同等概率被替换,造成了一定的寻优损失。同时受u、v影响,L(λ)步长随机性强。如全程采用大步长,会导致结果陷入局部最优;如全程采用小步长,虽然结果更优,但会牺牲搜索效率。因此经综合考虑,引入一种动态发现概率Pd和自适应步长s,使得更优的鸟巢易被保留,同时在不同的搜索阶段,令搜索效率和精度保持平衡状态,进而达到最佳效果。
动态发现概率表达式如下:
式中:pmax、pmin分别为最大和最小发现概率;gmax、g分别为CS初始最大和当前迭代数。
根据当前搜索值距离全局最优值的距离,自适应调整步长s的大小,其中第t+1 代搜索路径的步长表达式如下:
式中:f为当前最佳鸟巢的目标函数值;f'为下一轮更新后,择优所选鸟巢位置对应的目标函数值;为第t代搜索路径的步长。
可得到优化后的PSCS算法如下:
通过式(6)可知,当目标函数快速收敛时,|1-f'/f|会相应地增大,使得CS保持大步长状态进行寻优;相反,当目标函数收敛缓慢时,搜索步长也会相应地缩小,避免遗漏全局最优值。因此与CS的寻优效果相比,PSCS 可最大限度地淘汰劣质结果,并提高寻优的效率。
1.3 改进PSCS-RBF算法
经动态发现概率和自适应步长改进后的PSCS算法,可优化RBF神经网络,具体内容如下。
(1) 对CS 的参数包括鸟巢的总数量n、目标函数f(x)、最大迭代次数gmax等进行初始化。根据RBF 的3 层结构,确定n个鸟巢的初始位置,以及代表RBF 神经网络的心点c、宽度δ、连接权值w等需寻优的参数。
(2) 计算当前初始化后的鸟巢的目标函数,然后选出最小的目标函数值并标记为f,记录该鸟巢对应的位置x。
(3) 通过式(1)引入自适应步长,动态调整迭代的速度,更新鸟巢位置,再次计算该组鸟巢的目标函数,选出最小的目标函数,并与f对比,将更优的值赋值给f'。
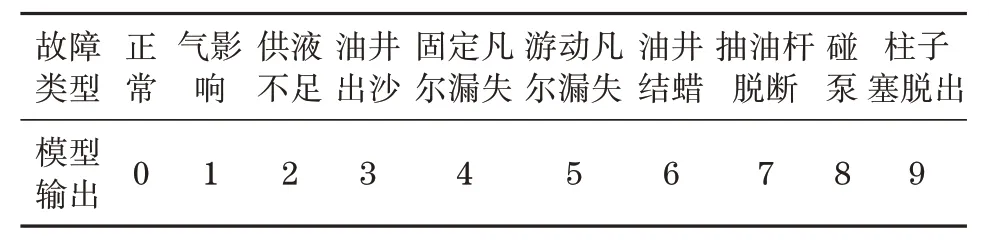
(4) 此时1 组随机数r被生成,其中r∈[0,1]。比较r与Pd的大小值,当r>Pd时,再次更新鸟巢位置,并计算目标函数值,选择最小的记为f',记录其对应的位置x'。比较f'与f,选择出最小值赋值给f,并将其鸟巢位置赋值给x;当r (5) 通过循环更新迭代,当目标函数值满足要求且达到最大迭代数gmax时,将会得到最优目标函数f,并将其对应的鸟巢位置x解编作为RBF 神经网络的心点c、宽度δ以及连接权值w等参数。 油田的抽油机实际工作中,通常会因操作不当、环境复杂、内部机械磨损的积累、化学成分腐蚀等各种不可预料的因素,导致故障的产生。抽油机在井下工作时出现不同的故障,都会反映成对应形状的示功图,可基于此分析常规的抽油机故障。目前,将抽油机故障划分为气影响、油井出沙、游动凡尔漏失等10 余种类型[14-15],不同的故障对应不同形状的示功图。如抽油杆由于疲劳破损、化学腐蚀、卡死等原因出现故障;当油气混流,导致油气比显著升高,引发气影响故障;当井下油层的供液量与深井泵的排除量不匹配,造成柱塞脱离液面时,显示为供液不足故障。 本次实验选择胜利油田共计1 278 组10 种常见类型的抽油机示功图作为实验样本,将改进后的PSCS-RBF 算法应用于抽油机故障诊断。将2/3 的实验数据作为训练样本集,对神经网络进行训练,其他1/3 数据用于检测所提方法的最终效果,主要步骤如下。 (1) 通过Max-Min 算法,将本次实验采集的示功图数据进行归一化处理。 (2) 为减小示功图变换对结果的影响,提高图像识别的稳定性和精度,采用形状不变矩与傅里叶描述子结合法,对归一化后的数据进行特征提取,作为RBF神经网络的输入层信息。 (3)用引入动态发现概率和自适应步长改进的CS 进行寻优,得到RBF 的中心矢量c、宽度δ、连接权值w等参数。 (4) 本次实验样本数据集有抽油机正常状态和9 种常见故障类型,因此规定输出层神经元数量为10。 (5) 采用最终得到的PSCS-RBF 模型,训练后对抽油机进行故障诊断,对比输出层的诊断结果与抽油机故障类型,最为接近的是为该抽油机所属的故障类型。抽油机故障编号见表1。 表1 抽油机故障类型编号Tab.1 Pumping machine working condition type number table 为验证研究中所提出的PSCS-RBF 抽油机故障诊断法的实际检测效果及优越性,本文使用胜利油田1 278 组10 种常见类型的抽油机示功图数据,分别使用PSCS-RBF 与CS-RBF、PSO-BP、UKFRBF、CS-BP 等目前被应用于抽油机故障诊断的主流方法,在同一平台进行试验和综合对比。 经实验可得,算法的训练误差和迭代次数对比如图1 所示。在同等情况下,对比PSCS-RBF 与CS-RBF 可知,经研究改进后的PSCS 算法,其寻优能力得到明显的提升。从整体上比较,PSCS-RBF在寻优前期速度更优,同时在迭代了约50 次逐渐趋于平缓,并得到了全局最优值,证明PSCS的寻优速度最快,效果最好。 图1 算法寻优曲线对比Fig.1 Comparison of algorithm search curves 采用6种诊断模型诊断所选抽油机的9种故障类型,所得精度曲线对比如图2 所示。故障类型编号与表1 的抽油机故障类型编号对应。抽油机故障诊断结果见表2。由表2 可知,改进后的PSCSRBF抽油机故障诊断法缩减了模型的总体耗时,平均精度可达约95.9%,体现优化后的RBF 相比于DBN、BP等算法,更适合于抽油机的故障诊断。 图2 算法诊断精度对比Fig.2 Algorithm diagnostic accuracy comparison 表2 抽油机故障诊断结果Tab.2 Pumping machine fault diagnosis results 本文针对当前抽油机故障诊断问题,提出一种改进的PSCS-RBF 诊断方法。引入动态发现概率和自适应步长,使CS能够优先淘汰劣等值,并能根据目标函数收敛速度自动调整步长,进而避免陷入局部最优。然后用改进的PSCS 算法寻优得到RBF 的相关参数,最后将PSCS-RBF 诊断模型用于抽油机的故障诊断实验,证实该方法的优越性。尽管在油田抽油机故障诊断的实际应用中,环境等因素较为复杂,不可避免地会出现诊断错误,但采用该方法诊断所得的结果具备一定的参考性,同时可为后续研究提供新的思路。2 实验方案验证
2.1 故障类型分析
2.2 故障诊断流程
2.3 实验结果



3 结语
