基于不同路面谱的行进间高炮瞄准线两轴稳定性能研究
2023-04-12王智伟赵永娟张春帅郭伟峰冀云彪
王智伟,赵永娟,张春帅,郭伟峰,冀云彪
(1.中北大学机电工程学院,太原 030051;2.中北大学军民融合协同创新研究院,太原 030051;3.北方自动控制技术研究所,太原 030006)
0 引言
随着现代战场形势的日益发展,空袭成为未来战争中的重要部分,其发展呈多样化且具有强机动性等特点。自行高炮作为安装在装甲底盘上的武器系统,因其具有强火力、高机动等优点成为防空武器的重要一环[1]。行进间射击一直以来是自行高炮的重要发展方向,其行进间射击能力受到世界各国的重视[2]。相关研究表明,行进间射击相比于静止间射击精度差[3-4]。尤其在不平整路面下车体姿态振动引起的瞄准线扰动降低了对目标的探测跟踪能力,是造成行进间射击精度下降的重要原因。因此,改善行进间瞄准线的稳定精度,是提高目标探测和跟踪能力的重要手段。
瞄准线稳定平台能够有效地隔离动基座载体的扰动,其稳定原理按结构形式可分为两种,第一种是无源平台稳定,它是借助重力指向质心的原理消除载体产生的扰动量,该方法原理简单,无能量损耗,造价也相对较低,但其主要缺点是稳定时间慢,稳定精度低。第二种是有源平台稳定,它是利用惯性传感器测量车体姿态信息,通过计算机主动控制驱动器运动来消除载体运动的扰动量,其稳定精度相对较高,适用于光电观瞄系统跟踪稳定。有源平台稳定根据其控制方法又分为三轴稳定法和两轴稳定法。三轴稳定法是将观瞄系统固定安装在平台上,该平台在车体姿态改变时一直保持水平的状态,从而达到瞄准线的稳定,但三轴稳定平台的工作原理复杂,可靠性较差,且造价也十分昂贵,因此,工程上主要采用两轴稳定法。两轴稳定法是瞄准线在车体的扰动下相对于目标始终保持原有位置,而观瞄系统的基座会随着车体扰动时刻变化,因其稳定平台结构简单、造价低等优点应用十分广泛[5]。本文主要采用两轴稳定法,根据其工作原理建立了两轴稳定补偿量的数学模型,通过构建三维路面谱模型,计算不同等级路面和不同车体速度下车体振动姿态,并将其作为扰动量对两轴稳定平台的稳定性能进行分析研究。
1 稳定原理及坐标转换
两轴稳定法也称捷联稳定。在稳定过程中,稳定平台刚性连接在车体上随车体姿态而变化,瞄准线通过补偿量实时进行稳定补偿,实现瞄准线始终相对目标稳定[6]。
1.1 稳定原理
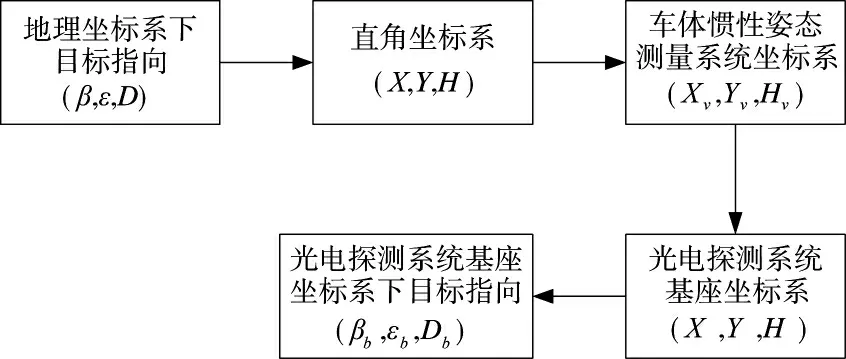
图1 瞄准线坐标转换流程图Fig.1 Flowchart of coordinate conversion of aiming line
如图1 所示,当瞄准线理想的方向矢量R 和实际方向矢量Rb相同时,瞄准线达到稳定状态。坐标转换流程中需要引入地理坐标系、车体惯性姿态测量系统坐标系、光电探测系统基座坐标系和光电探测器指向坐标系[7]。具体定义如图2 所示。
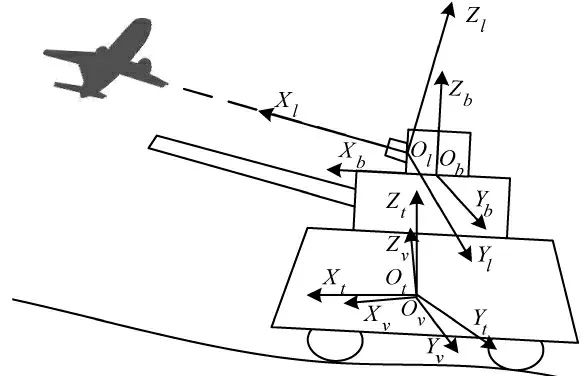
图2 各坐标系示意图Fig.2 Diagram of each coordinate system
1.2 坐标转换
1)地理球坐标系转换为直角坐标系
2)地理坐标系转换为车体惯性姿态测量系统坐标系
其中,
其中,θ、ψ、κ 为车体姿态角,即横滚角、俯仰角和偏航角。
3)光电探测系统基座直角坐标系转换为球坐标系
根据式(1)~式(3)即可将瞄准线的理想方向矢量转换到实际方向矢量。其中,式(2)中需通过计算不同路面谱下车体姿态角信息,分析行进间瞄准线稳定误差。
2 基于不同路面谱的车体姿态模型建立
路面谱是车体行进间射击时车体振动的主要激励,其振动主要影响武器系统的射击精度和武器的可靠性[8]。本章通过对路面谱重构,模拟不同路面下车体姿态振动曲线。
根据国家标准GB/T7031[9],按照路面不平整度把路面分为A~H 8 个等级,随着路面等级越高,路面不平整度越大。通过路面不平整度函数量化路面谱,把路面功率谱密度作为路面统计特性,其拟合表达式如下:
其中,n 为空间频率,表示每米路面长度中波长的个数;n0=0.1m-1为参考空间频率;为路面谱系数,表示参考空间频率的路面功率谱密度,单位m3;ω 为分级路面谱频率指数,决定路面功率谱密度的频率结构。
2.1 路面谱重构
本文采用谐波叠加法构建三维路面谱模型。谐波叠加法是采用正弦或余弦的随机相位叠加确定路面谱相位,根据路面功率谱密度的统计特征将路面看作是具有各态历经性的高斯随机过程,由三角级数求和获得路面谱,具有较高的精度和良好的适应性[10]。已知空间频率(n1,n2)上的功率谱密度,将(n1,n2)划分为m 个等份区间,区间长度为,以每个区间中心的值代替在整个区间的对应值。把离散后的正弦函数叠加,可得二维时域路面谱模型:
其中,
v 为车体的速度,θi为[0,2π]的随机数。
将其转换为空间域内的谐波叠加式:
自行高炮行驶环境复杂多变,一般分为铺装路面、未铺装路面和乡间路面等,因此,本文分别选取对应的B、D 和F 等级路面进行模拟,各级路面的三维路面谱模型如下页图3~图5 所示。

图3 B 级三维路面谱模型Fig.3 Three-dimensional pavement spectrum model of Grade B
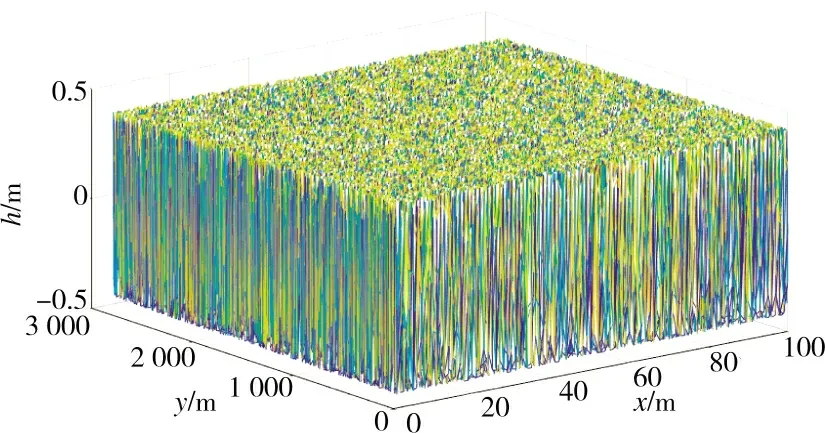
图5 F 级三维路面谱模型Fig.5 Three-dimensional pavement spectrum model of Grade F
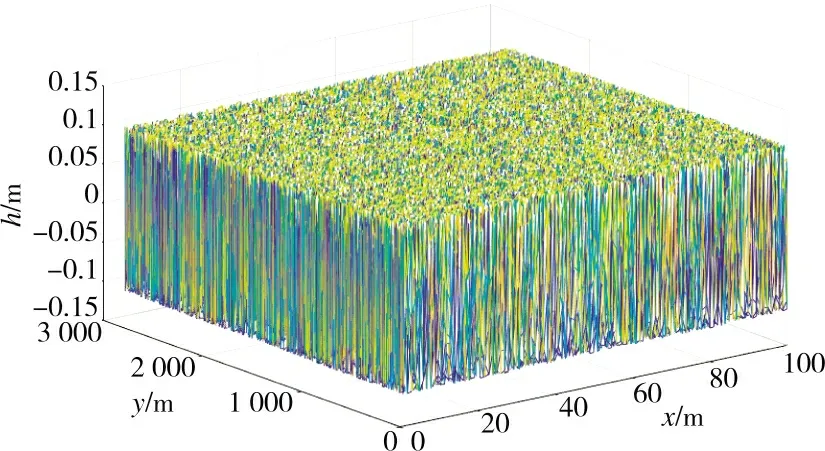
图4 D 级三维路面谱模型Fig.4 Three-dimensional pavement spectrum model of Grade D
从图中来看,在三维路面不平整度的分布中,由于功率谱密度随等级增加而变大,因此,随着路面等级的增加,相较于理想道路基准平面其振动幅度也随之增大。
2.2 车体姿态求解
本文采用简化模型的方法对车体姿态求解,该方法将车体看作一个平面,并将其简化为三角形ABC,根据三角形的顶点坐标和车体偏航角,即可确定车体姿态信息[11]。首先建立车体简化模型如图6所示。
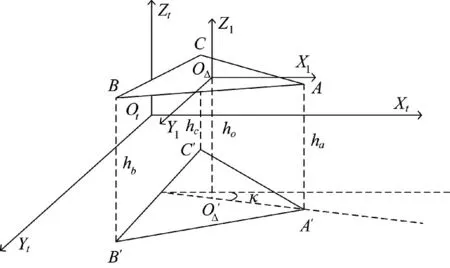
图6 车体简化模型Fig.6 Simplified model of hull
自行高炮在行进间射击时车体速度一般为10 m/s。因此,本文以10 m/s 的速度在不同路面下行驶和同一等级路面下以5 m/s,10 m/s 和15 m/s 速度行驶的两种情况,分别对车体姿态进行计算。
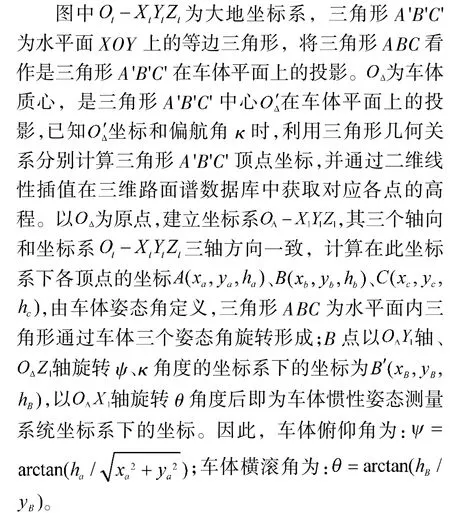
车体以10 m/s 速度且偏航角10 mil 时在B、D和F 级路面下行驶的车体俯仰角和横滚角振动曲线如图7 和图8 所示。
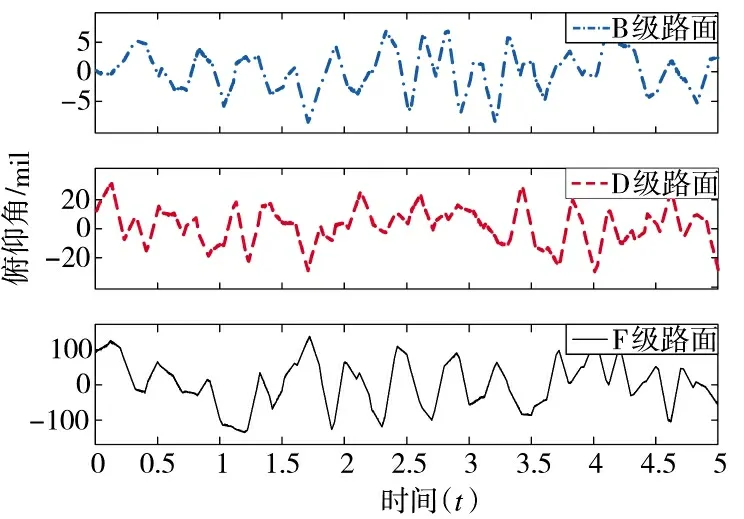
图7 不同路面谱下车体俯仰角曲线Fig.7 Pitch angle curve of hull under different pavement spectra

图8 不同路面谱下车体横滚角曲线Fig.8 Roll angle curve of hull under different pavement Spectra
车体在D 级路面下行进,偏航角10 mil 时,以不同车体速度行驶时车体俯仰角和横滚角振动曲线如图9 和图10 所示。

图9 不同速度下车体俯仰角曲线Fig.9 Pitch angle curve of hull at different velocity
图10 不同速度下车体横滚角曲线Fig.10 Roll angle curve of hull at different velocity
由图7~图10 看出,随着路面等级增加,车体姿态角的振幅逐渐增加,振动频率大致相同;当车体速度增加时,同一等级路面下车体姿态角振幅基本一致,而振动频率增加。因此,不同路面等级和不同车体速度分别对车体姿态角的振动幅度和振动频率产生影响,通过振幅和振动频率的变化对瞄准线造成不同程度的稳定误差。
2.3 瞄准线稳定模型建立
根据两轴稳定原理,瞄准线稳定平台示意图如图11 所示。
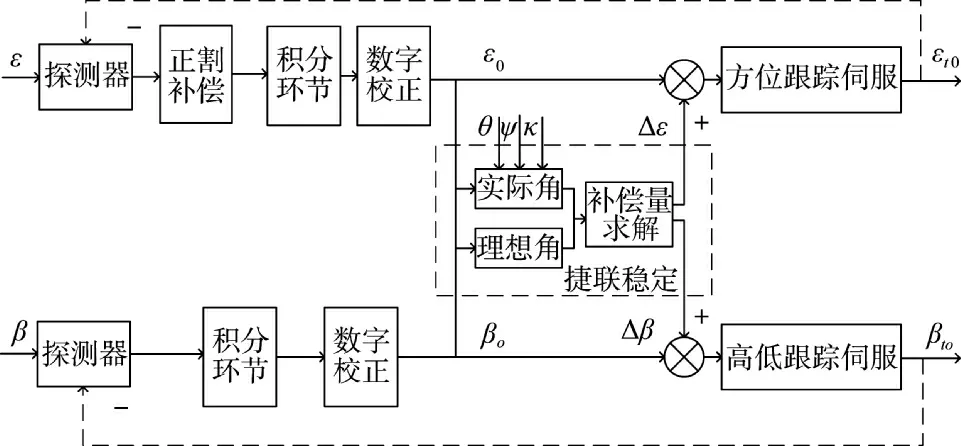
图11 瞄准线稳定原理图Fig.11 Stability principle diagram of aiming line
瞄准线稳定平台由探测器、正割补偿模块、数字积分器、随动跟踪伺服模块、数字校正模块和捷联稳定模块组成。探测器是获取跟踪装置相对于目标的跟踪误差,将其简化为模型输入和输出之差;正割补偿模块是改善在高仰角下方位角几何偏差导致容易丢失目标的问题,因此,在方位上添加正割函数作为方位角补偿,其补偿因子为俯仰角[12]。其中,数字校正模块和捷联稳定模块是为了提高系统动态性能和稳定精度,是瞄准线稳定模型建立的关键。
以俯仰稳定系统为例,其系统原理框图如图12所示。
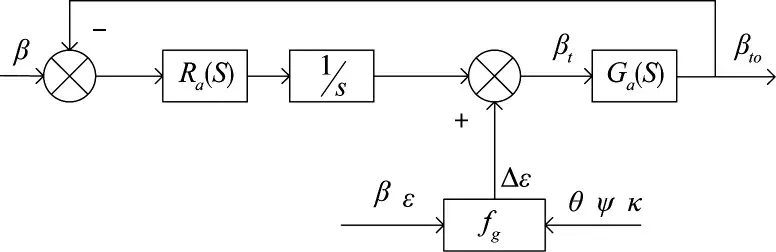
图12 俯仰稳定原理框图Fig.12 Principle block diagram of pitch stability
图中Ga(s)为俯仰跟踪伺服系统传递函数,Gc(s)为数字校正传递函数,fg为捷联稳定模块。俯仰稳定系统以双通道实现对行进间的瞄准线稳定,具体可分为跟踪通道和稳定通道[13],如图13 为高低系统跟踪通道。

图13 俯仰跟踪通道框图Fig.13 Block diagram of pitch tracking channel
在俯仰跟踪通道中,以某自行高炮稳定伺服系统为例,其伺服系统的传递函数为[14]:
数字校正传递函数是提高稳定平台对目标的跟踪精度,故采用超前-滞后校正提高系统对数幅频特性曲线中低频段的放大倍数、增大中频段的斜率并且降低高频段的幅值,从而改善系统的动态品质。通过频率法经参数调节[14],确定参数为Kc=20、T1=0.901 1、T2=2 传递函数模型为:
瞄准线稳定通道如图14 所示。
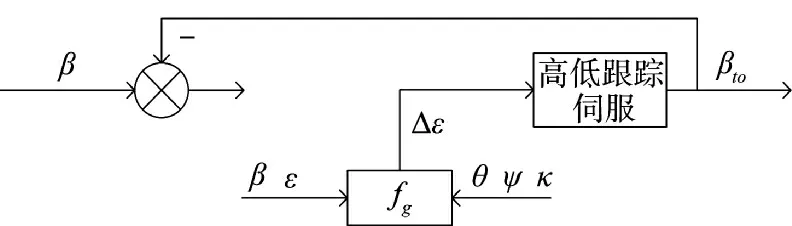
图14 俯仰稳定通道框图Fig.14 Block diagram of pitching stable channel
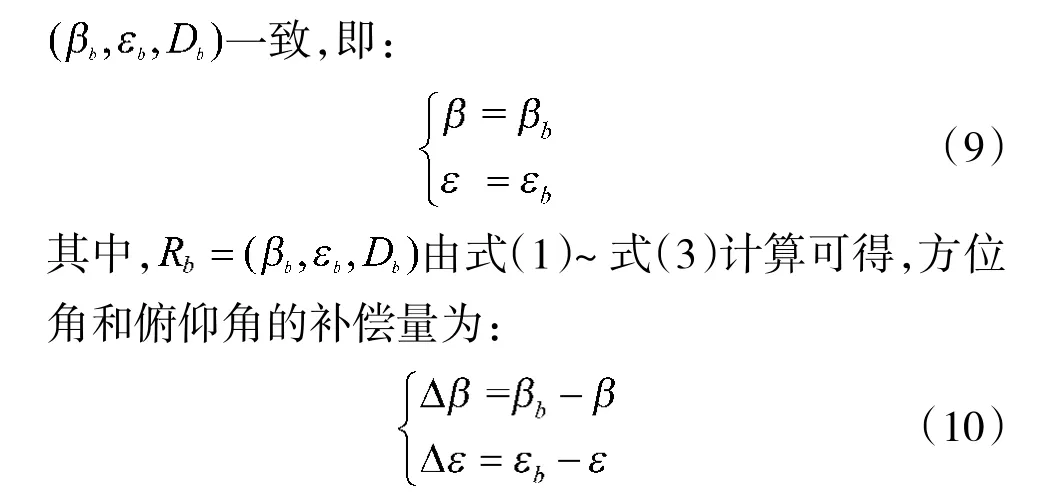
图中捷联稳定模块fg计算方位角和俯仰角的补偿量,若要使瞄准线相对稳定,则必须满足瞄准线理想的方向矢量与实际方向矢量
3 仿真分析
以B 级路面为例,车体以10m/s 速度行驶下有无瞄准线稳定补偿的稳定误差曲线如图15 和图16所示。
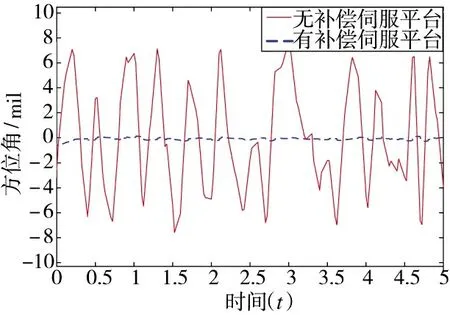
图15 B 级路面下行驶方位角稳定误差曲线Fig.15 Stability error curve of driving azimuth angle under B-level pavement
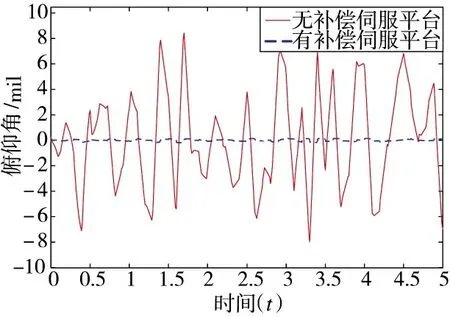
图16 B 级路面下行驶俯仰角稳定误差曲线Fig.16 Stability error curve of pitch angle driving under B-level pavement
通过对仿真结果采样和计算,车体在不同路面下以10 m/s 速度行驶时,两轴稳定补偿的伺服平台稳定误差降低比例如表1 所示。
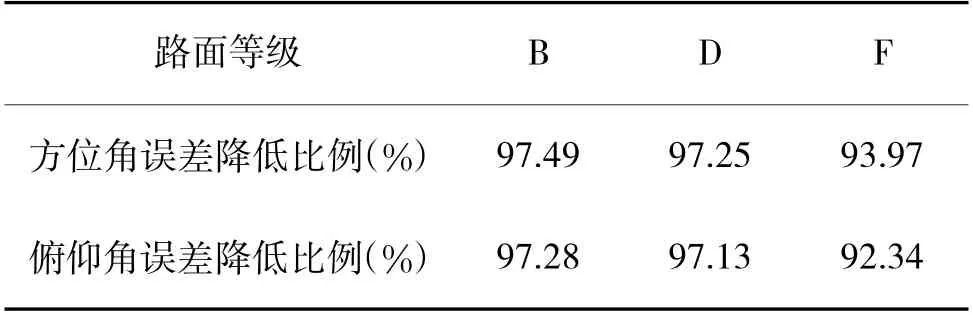
表1 车速10 m/s 时不同路面下稳定误差降低比例Table 1 Reduction ratio of stability error under different road conditions at vehicle speed of 10 m/s
从表1 看出,车体以10 m/s 的速度在B、D 和F级路面上行驶时,通过两轴稳定法对方位角和俯仰角的补偿,车体扰动造成的瞄准线稳定误差降低92%以上,B 级和D 级能达到97%以上,抗干扰能力均有显著提升。
车体在B、D 和F 及路面下瞄准线稳定误差对比曲线如图17 和18 所示。
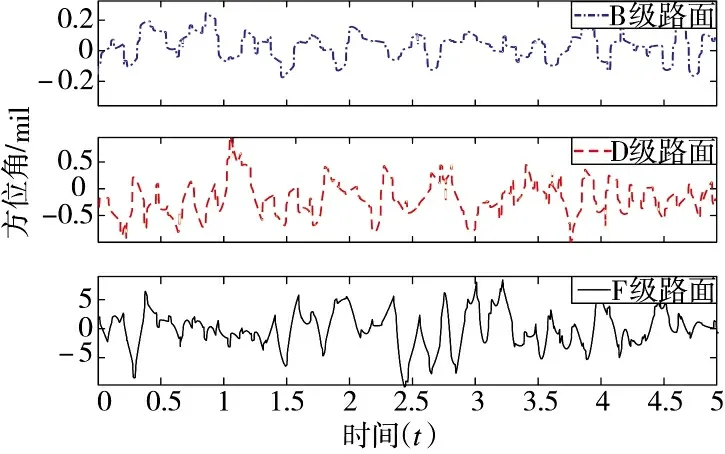
图17 不同路面下方位角稳定误差Fig.17 Azimuth stability errors on different pavements
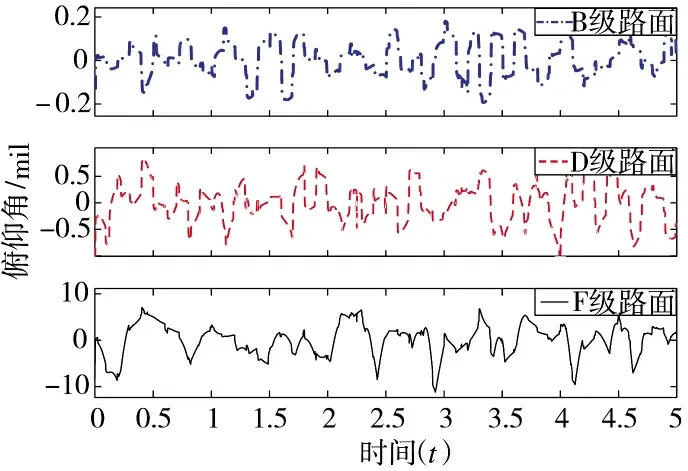
图18 不同路面下俯仰角稳定误差Fig.18 Stability error of pitch angle on different pavements
车体在D 级路面下以5 m/s、10 m/s 和15 m/s的速度行驶,方位角和俯仰角的稳定误差曲线如图19 和20 所示。
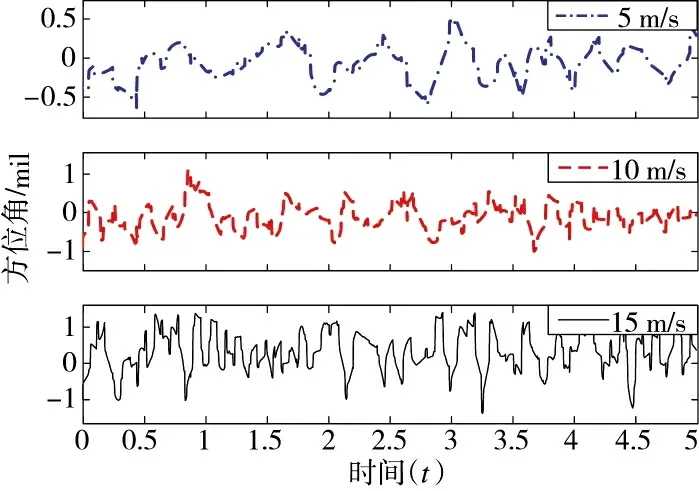
图19 不同速度下方位角稳定误差Fig.19 Azimuth stability error at different velocity
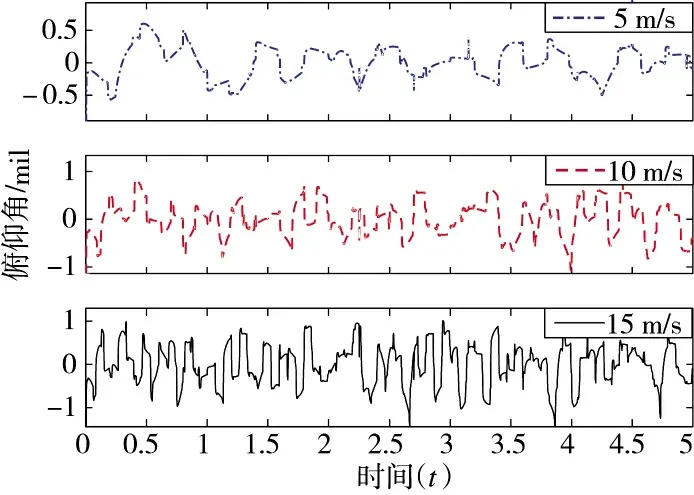
图20 不同速度下俯仰角稳定误差Fig.20 Stability error of pitch angle at different velocity
不同工况下瞄准线稳定误差特性如表2 和3所示。
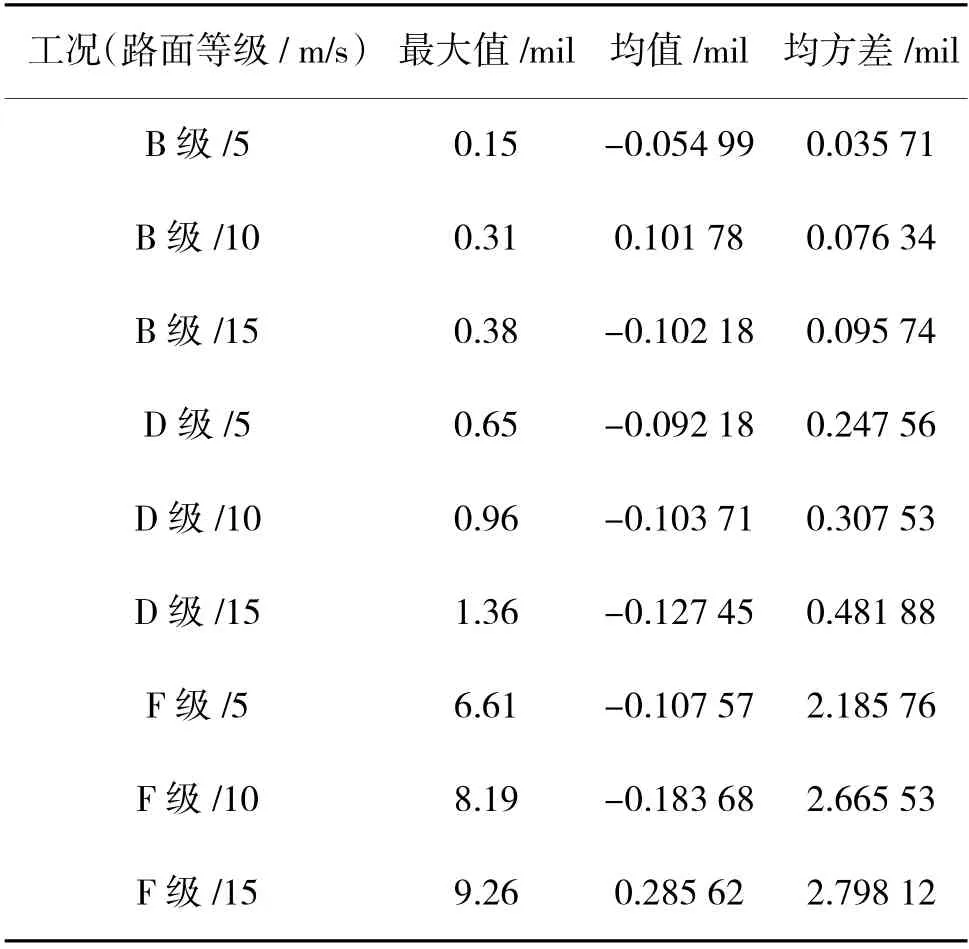
表2 B、D 和F 级路面不同速度下方位角稳定误差Table 2 Azimuth stability error of B、D and F grade pavement at different velocity
从表2 和表3 看出,B 和D 级路面下瞄准线稳定误差最大值均小于1.5 mil,而F 级路面下稳定误差在10 mil 左右。在路面等级相同时,随着车体速度的增大,稳定误差也随之增大,但是高等级路面下车体速度对稳定精度影响更加显著。因此,车体速度在15 m/s 以下时,B 和D 级路面下抗干扰效果更好,是车体在行进间探测与跟踪目标较理想的路面。
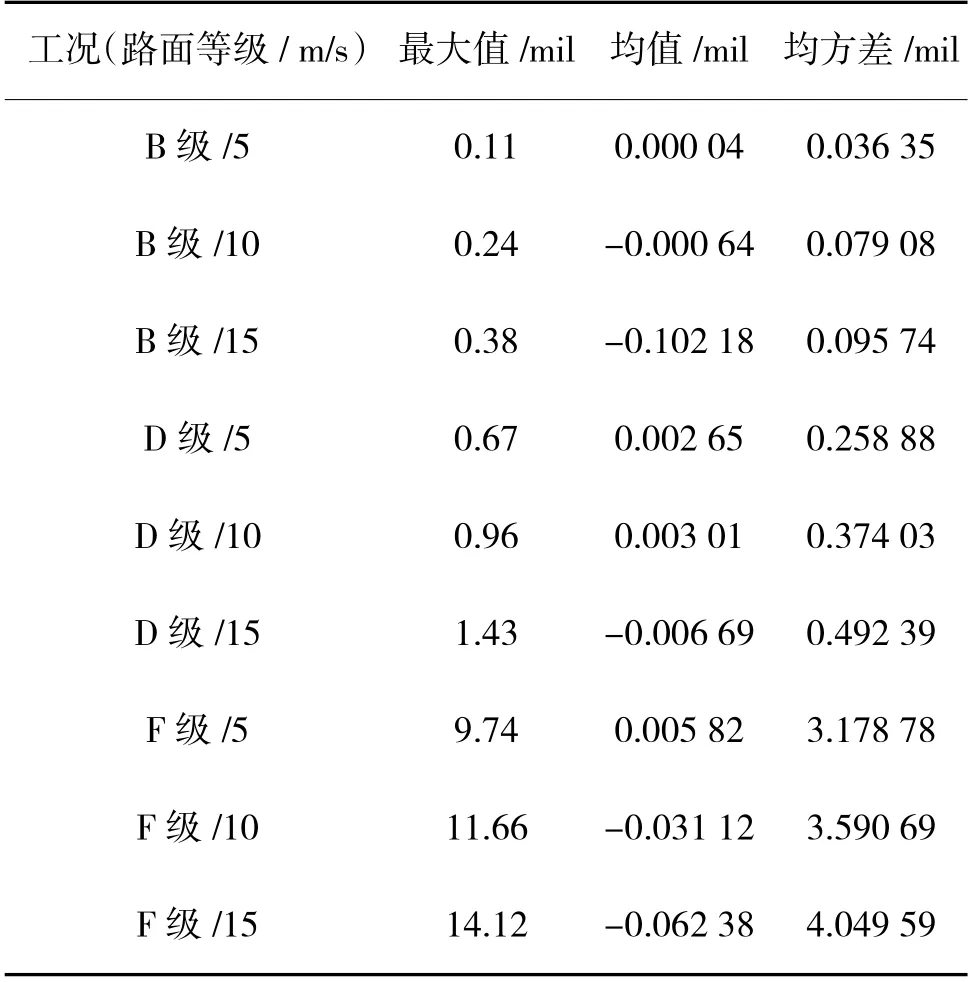
表3 B、D 和F 级路面不同速度下俯仰角稳定误差Table 3 Angle stability error of B、D and F grade pavement at different velocity
4 结论
本文以不同等级路面和不同车体速度下车体姿态振动作为干扰源,采用两轴稳定法,构建瞄准线稳定模型。通过仿真分析,两轴稳定法在B 和D级路面下稳定误差的抑制能力达到97%以上,在F级路面能达到92%以上。随着路面等级和车速的增大,稳定精度随之恶化,其中高等级路面下车速变化对瞄准线稳定的影响更大;在F 级路面下瞄准线稳定精度较B 级和D 级路面有所降低。究其原因是F 级路面产生的非线性扰动较大,两轴稳定法已经达到稳定极限,而基于经典控制策略的伺服控制器在非线性系统中处理能力较差。因此,基于现代控制策略设计合适的伺服控制器改善稳定跟踪平台的抗干扰能力,为解决当前高速越野环境下高炮及智能无人化系统的稳定跟踪平台设计和稳定伺服系统抗扰性研究提供理论的支撑,为今后的研究指明方向。
