应召搜潜中多机吊放声纳螺线路径规划问题研究*
2023-04-12孙秀文郑有志
唐 晨,孙秀文,郑有志
(海军指挥学院,南京 210016)
0 引言
潜艇隐身性能得到较大提高的同时,人们对反潜搜索也更加重视[1]。应召搜潜[1-4]是一种常见的反潜搜索行动样式,是指搜潜兵力应其他兵力的召唤,前往发现潜艇的海域,搜索潜艇的战斗行动。在应召搜潜中,螺线路径搜潜[5]是一种十分有效的搜潜方法。当搜潜兵力为反潜直升机时,其最主要的探测手段是吊放声纳[6]。反潜直升机突出的灵活机动性,保障了其吊放声纳可以按螺线路径逐点悬停[7]搜潜。同时,现代海上作战,任务海区附近的水面舰艇编队往往携有多架反潜直升机。因此,对应召搜潜中多机吊放声纳螺线路径规划问题进行研究,建立模型,给出各反潜直升机的飞行路径和吊放位置计算方法,对于应召搜潜实践具有一定的理论和现实意义。
1 多机吊放声纳螺线路径建模
1.1 问题分析
在应召搜潜中,已知潜艇的丢失位置且其规避速度小于搜潜兵力的搜索速度,潜艇的规避速度不变、规避方向未知,通过建模计算可得:最佳搜潜路径为一条以潜艇丢失位置为中心的螺线[5]。假设满足上述条件,计划用任务海区的n 架反潜直升机共同执行螺线路径搜潜任务,需要规划路径。
应召搜潜的关键在于尽可能缩短延误时间[8-9],以缩小潜艇的扩散范围。因此,当多机吊放声纳螺线路径搜潜时,也应尽快展开搜潜行动。据此,可以起飞时距离潜艇丢失位置最近的反潜直升机为基准兵力,协调其他反潜直升机的搜潜行动。其中,基准兵力的飞行路径在其初始位置与潜艇丢失位置连线上。基准兵力飞行至预计与潜艇相遇位置,立即使用吊放声纳按螺线路径搜潜。剩余反潜直升机的起始吊放位置,以潜艇丢失位置与基准兵力初始位置连线为基准线,等角度间隔配置在以潜艇丢失位置为中心的各方向上。并且为缩短整体延误时间,以反潜直升机到各自起始吊放位置路程之和最小为判定法则,确定剩余反潜直升机的飞行路径和起始吊放位置。剩余反潜直升机抵达各自起始吊放位置后,立即使用吊放声纳按螺线路径搜潜。为保证行动上互不妨碍,各反潜直升机按逆时针或顺时针方向螺线路径合围潜艇。解决思路如图1 所示。
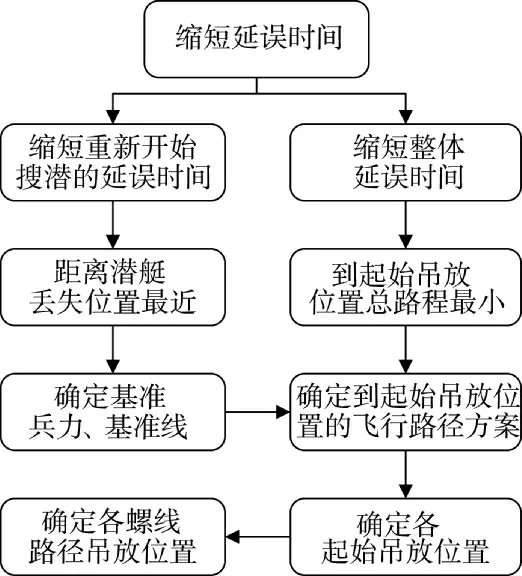
图1 解决思路流程图Fig.1 Flow of solution ideas
1.2 建立模型
根据上述分析,多机吊放声纳螺线路径规划问题,可以通过3 个模型予以解决,分别是反潜直升机起始吊放位置角模型、反潜直升机到起始吊放位置的飞行路径模型、螺线路径搜潜吊放位置模型。通过模型1,解决n 个起始吊放位置在潜艇丢失位置哪个方向上的问题;通过模型2,由路程之和最小判定法则,解决剩余n-1 架反潜直升机到各自起始吊放位置飞行路径最优方案问题,进而确定n 个起始吊放位置;通过模型3,解决n 架反潜直升机按螺线路径搜潜剩余吊放位置问题。
下面进行建模具体分析。建立直角坐标系,潜艇的丢失位置为原点O 点,Y 轴为正北方向,X 轴为正东方向。同时,建立极坐标系,潜艇的丢失位置O 点为极点,X 轴为极轴,极角为θ。建立直角坐标系后,即可获得起飞时各反潜直升机的初始位置,将距离O 点最近的位置编为H1、剩余位置依次编号H2-Hn。起飞时反潜直升机初始位置坐标记为。为便于讨论分析,作如下假设:一是各反潜直升机为同型号,且各反潜直升机接到任务后准备时间、飞行速度及其吊放声纳使用耗时相同;二是各反潜直升机按逆时针方向螺线路径合围潜艇。
1.2.1 反潜直升机起始吊放位置角模型
根据问题分析,基准兵力为H1点的反潜直升机,其起始吊放位置在直线OH1上。因此,在极坐标系中,基准兵力的起始吊放位置角与初始位置角相同。基准兵力起始吊放位置角θ1为:
基准线为OH1。剩余反潜直升机的起始吊放位置,以OH1为基准线,等角度间隔配置在以O 点为中心的各方向上。如图2 所示。因此,第i 个方向上起始吊放位置角θi为:
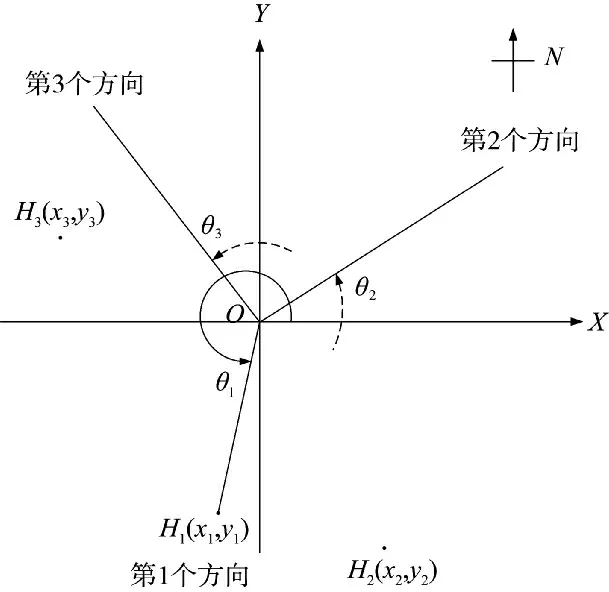
图2 3 架反潜直升机起始吊放位置角示意图Fig.2 Sketch map of dipping position angle of 3 helicopters against submarines
1.2.2 反潜直升机到起始吊放位置的飞行路径模型
为不失一般性,讨论第j 架反潜直升机飞到第i个方向上起始吊放位置的情况。假设潜艇的规避方向为第i 个方向,在反潜直升机起飞时,可机动至点。尔后,第j 架反潜直升机沿直线接近潜艇。第j 架反潜直升机飞到点放下吊放声纳搜潜时,潜艇恰好机动至点。即第j 架反潜直升机起始吊放位置为点。如图3 所示。
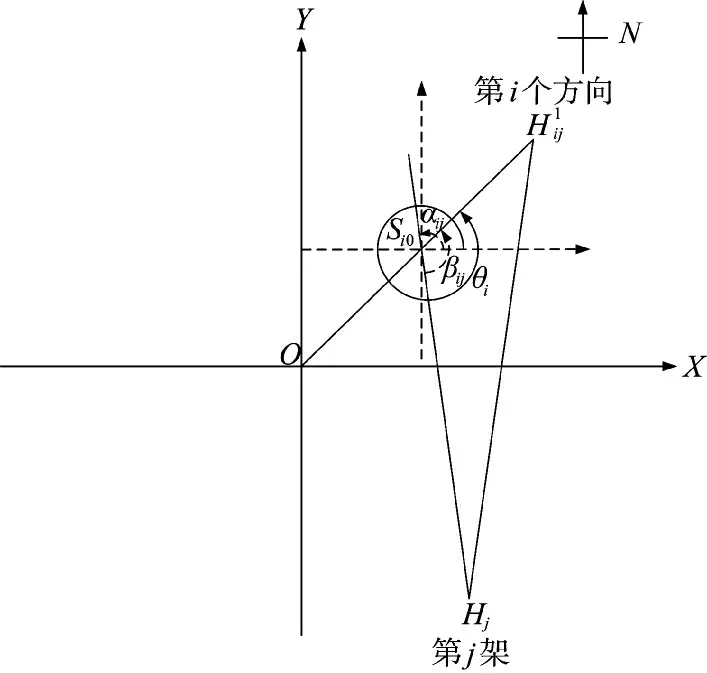
图3 第j 架反潜直升机在第i 个方向上起始吊放位置示意图Fig.3 Sketch map of dipping position of No.j helicopter against submarine in No.i direction
由运动原理,可得:
其中,vs为潜艇的规避速度;vh为反潜直升机的飞行速度;t0为潜艇丢失到反潜直升机起飞时的间隔时间;tij为反潜直升机从Hj点飞到点的时间;tdx为反潜直升机吊放声纳放下时间。
将式(4)~式(6)代入式(7),并与式(8)联立,化简可得:
由式(9)编程可得tij。
计算出tij,再由式(5),即可求得第j 架反潜直升机到第i 个方向上其起始吊放位置的距离。
根据问题分析,基准兵力到其起始吊放位置的路径是确定的,在第1 个方向上(θ1)。而剩余n-1 架反潜直升机到另外n-1 个方向上()起始吊放位置的路径方案,则有种,如n=4时,有6 种。选出路程之和最小()的方案作为优选方案,即可确定剩余反潜直升机到起始吊放位置的飞行路径。由式(2)~式(4),可计算出所有

上述模型运用的是解析法求解,实际上还可以根据相对运动原理运用作图法求解。解析法相较于作图法的优点在于对人员的绘算要求不高,可以实现程序计算,能够大大缩短形成方案的时间。
2 多机吊放声纳螺线路径仿真
在应召搜潜任务中,计划用3 架反潜直升机共同执行螺线路径搜潜任务。潜艇丢失时刻为T 时刻;在以潜艇丢失位置为原点O 点、正北方向为Y轴的直角坐标系中,3 架反潜直升机起飞时的初始位置分别为(-30,-30)、(-50,-32)、(32,-32)。现在需要规划每架的飞行路径和吊放位置。设置参数如下:潜艇的规避速度vs为16 kn;反潜直升机的飞行速度vh为200 km/h;吊放声纳放下时间tdx为1 min、收起时间tdq为1 min、搜索时间ttc为3 min、作用半径ds为8 km、间隔系数ks为1.5;潜艇丢失到反潜直升机起飞时的间隔时间t0为0.2 h。
根据建模思想,将距离O 点最近的位置点(-30,-30)编为H1,其他两个位置点(-50,-32)、(32,-32)依次编为H2、H3。据此,对应位置的反潜直升机记为第1 架、第2 架、第3 架。其中,第1 架为基准兵力。
2.1 第1 架的飞行路径和吊放位置
由式(1),可得H1点的位置角θ1=225°。由θ1=225°和式(3),可得S10(-4.19,-4.19)。由θ1=225°和式(3)、式(4)、式(9)~式(11),可得第1 架吊放位置,如表1 所示。
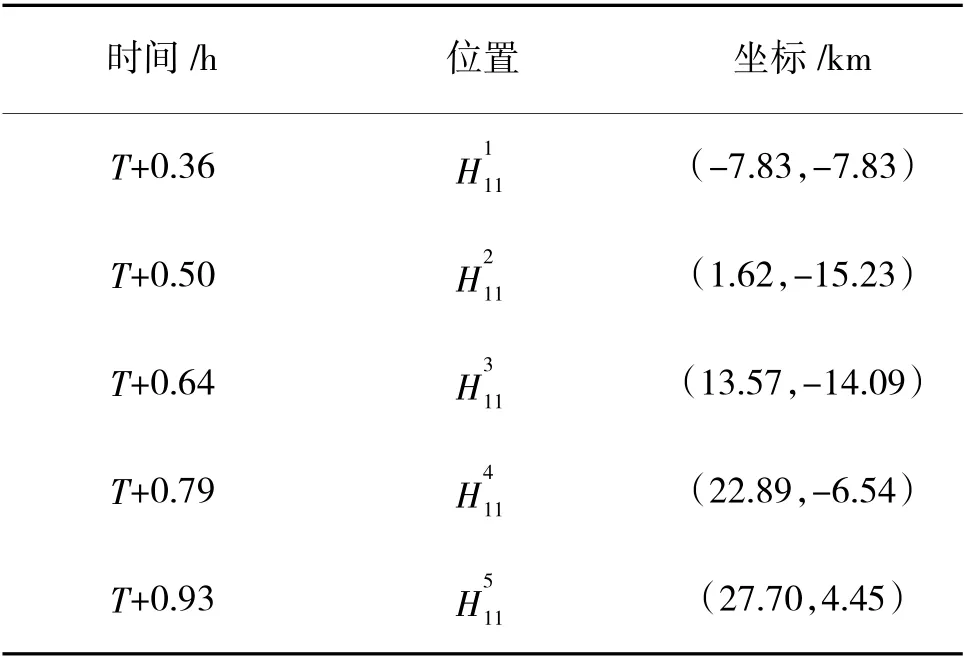
表1 第1 架吊放位置Table 1 Dipping position of No.1 helicopter

2.2 第2 架、第3 架反潜直升机的飞行路径和吊放位置
2.2.2 第2 架、第3 架飞行路径和吊放位置
由θ3=465°和式(3)~式(4)、式(9)~式(11),可得第2 架吊放位置,如表2 所示。
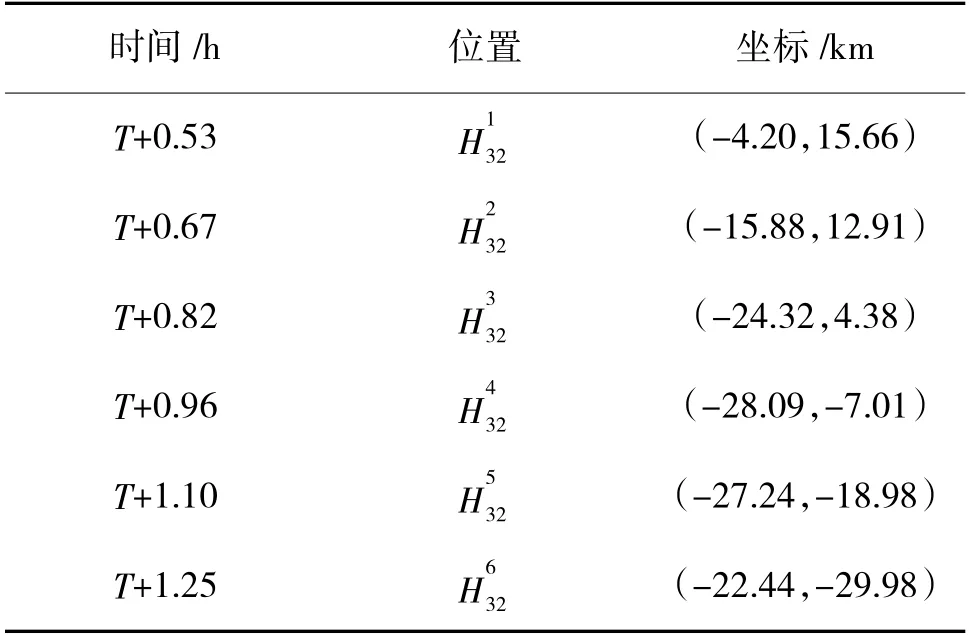
表2 第2 架吊放位置Table 2 Dipping position of no.2 helicopter
3 结论
针对多机吊放声纳螺线路径规划问题,本文从缩短应召搜潜的延误时间出发,建立了3 个模型,给出了理论分析和计算公式,并对模型进行了仿真验证。仿真结果验证了模型的可行性。在实际中,当符合模型条件时,运用模型可快速获得优化路径和吊放位置,一定程度上能够为搜潜人员提供决策参考。但潜艇的规避方式往往是复杂多变的,因此,下步还需要结合潜艇规避的其他可能情况,对多机吊放声纳路径规划问题展开进一步的研究分析。
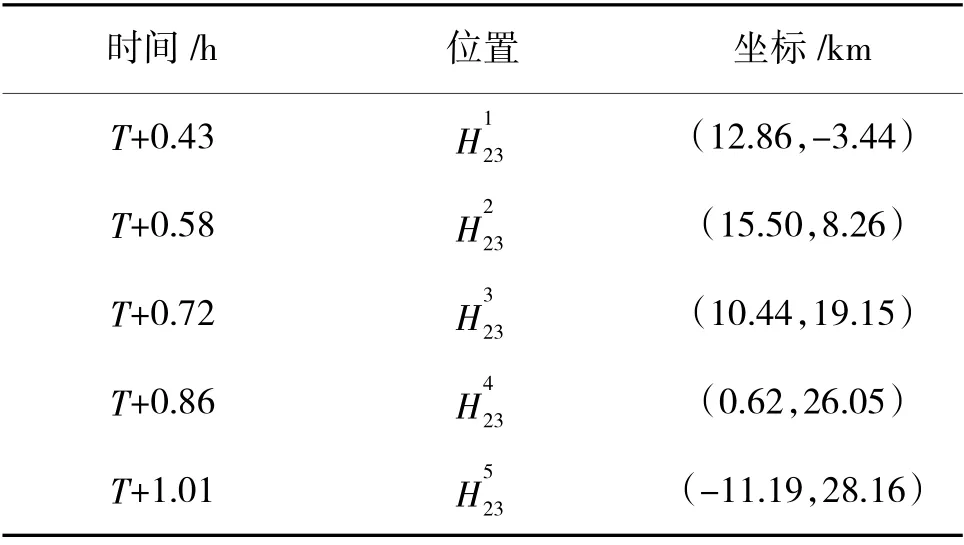
表3 第3 架吊放位置Table 3 Dipping position of no.3 helicopter
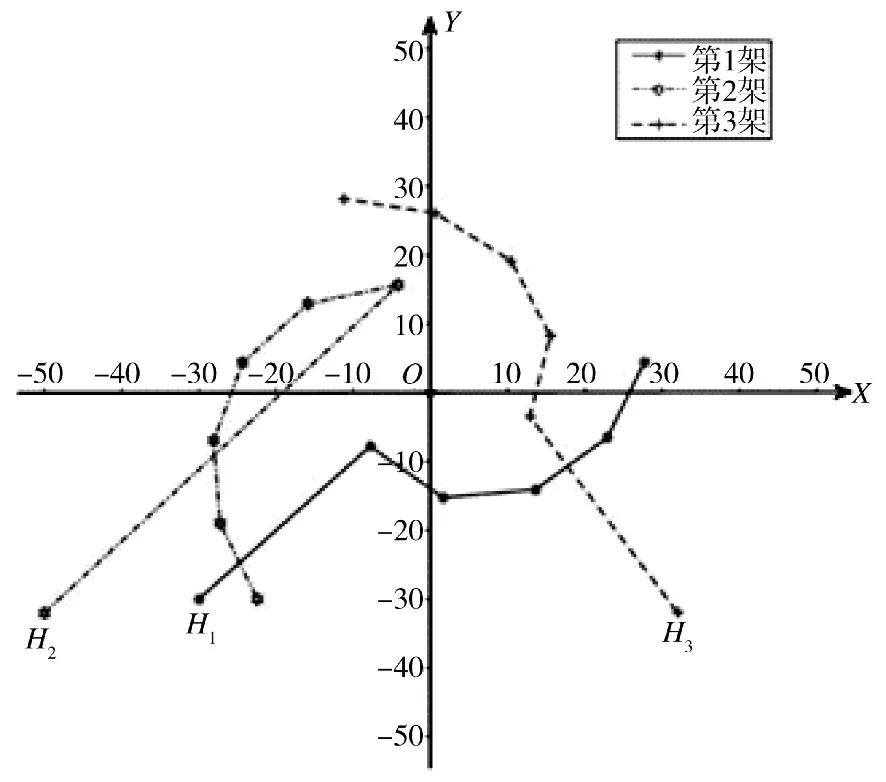
图5 3 架反潜直升机飞行路径和吊放位置示意图Fig.5 Sketch map of flight paths and dipping position of 3 patrol helicopters against submarines
