基于CVG 的滑跃甲板尾流抑制
2023-04-08杨穆清马东立
杨穆清,张 良,马东立
(北京航空航天大学 航空科学与工程学院,北京 100191)
0 引言
舰载机着舰过程要求高精度的航迹控制,但其着舰过程中需要穿越舰船的尾流区。舰尾流增大了航迹精确保的难度,是十分重要的环境影响因素。
航母上可供起飞的甲板长度非常有限,滑跃甲板有利于缩短起飞距离[1]。一些研究[2-4]证明滑跃甲板对提高起飞安全性有利。许多航母都采用了滑跃甲板,如俄罗斯的“库兹涅佐夫将军”号。虽然它可以帮助飞机在没有弹射器的情况下起飞,但滑跃甲板也会在飞行甲板上产生更强的尾流。因此,抑制滑跃甲板尾流强度,对提高舰载机起降安全性有重要的意义。
过去,许多学者对航母或驱逐舰/护卫舰的尾流进行了研究。Reddy[5]比较了获取全尺寸船舶尾流数据的各种技术,如手持式机械传感器、桅杆安装的螺旋桨风速计、激光测速仪等,并评估了每种技术的效用和优缺点。许多学者[6-11]采用CFD 和风洞试验方法研究了两栖登陆舰的尾流,如LHA 级和LPD 17 圣安东尼奥号两栖登陆舰,将CFD 得到的稳态解和频谱与风洞试验结果进行了对比,发现两者吻合良好。研究结果表明,舰船的尾流具有很强的非定常特性,会影响飞行安全。
尽管有大量学者对舰尾流开展了研究工作,但是专门针对滑跃甲板造成的尾流的研究并不多。郜冶[12]等利用CFD 方法对滑跃起飞过程舰体周围的流场进行了仿真研究。Bardera-Mora 等[13]研究了滑跃甲板产生的尾流对AV-8B 飞机起飞性能的影响,结果表明滑跃甲板的尾流对AV-8B 飞机起飞的影响不可忽略。
尾流场的非定常扰动不仅对于舰载机起飞有很大影响,对于着舰精度的影响也很大,舰载机着舰的最大误差是舰尾流对飞机的扰动造成的。以美军F-4J舰载机为例,0.3 m/s 的水平阵风(均方根值)可造成0.12 m 的垂直误差(1.96 m 水平误差),0.3 m/s 的垂直阵风(均方根值)可造成0.39 m 的垂直误差(6.38 m 水平误差)[14]。
为降低舰尾流对舰载机起降的影响,许多学者提出了不同的尾流抑制方案。Shafer 等[15]、Findlay 等[16]针对驱逐舰直升机甲板,研究了一系列主动、被动尾流抑制方法,并认为栅栏可以有效降低直升机甲板气流的不稳定性。Greenwell 等[17]利用风洞研究了高密度筛网对降低护卫舰飞行甲板气流不稳定性的作用,探索了筛网尺寸、角度等参数对尾流抑制效果的影响。Nangia 等[18]分析了不同的装置抑制舰尾流的效果,并指出柱状涡流发生器(cylindrical vortex generators,CVG)具有良好的效果。Lamar 等[19]研究了利用CVG减弱平直甲板两栖登陆舰的尾流强度,取得了较好的效果。Landman 等[20]将CVG 布置在平直甲板两侧,发现可以有效降低平直甲板的边缘涡。
前述学者利用CVG 在减弱驱逐舰和平直甲板两侧边缘涡方面取得了一定的研究成果,研究表明CVG在抑制舰尾流强度方面具有良好效果。舰船尾部可以看作是顺气流台阶,台阶后部存在较强烈的分离区,从而使得舰船尾部气流紊乱,产生复杂的尾流。而对于滑跃甲板,同样可以看作是一个台阶,甲板后部也同样存在较强的分离流动,加剧了甲板上方及舰船尾部气流的波动。考虑到滑跃甲板后部的流动与舰船尾部流动具有相似性,因此可以认为CVG 对于减弱滑跃甲板造成的气流波动也具有较高的潜力。
基于上述考虑,本文采用CFD 方法,开展基于CVG的滑跃甲板尾流抑制研究。首先,对比了滑跃甲板和平直甲板对舰尾流的影响;其次,将CVG 应用到滑跃甲板设计中,探究其对尾流抑制的效果。结果表明,CVG 对降低滑跃甲板舰艏涡强度有较好的效果,可有效减弱滑跃甲板对舰载机起降的影响。
1 舰尾流CFD 计算
1.1 几何模型
参照俄罗斯“库兹涅佐夫将军号”航母构建数值模拟用航母几何模型,如图1 所示。舰长304.5 m,甲板宽72 m,甲板距水面高度17 m,舰桥最高距水面36 m,滑跃甲板出口角14°。

图1 本文所用几何模型与俄罗斯航母侧视图Fig.1 Side view of the Russia aircraft carrier and the model used in present work
为了对比研究滑跃甲板对舰尾流的影响,还建立了一个平直甲板航母模型。与滑跃甲板模型相比,除前部甲板改为平直甲板以外,其他参数完全相同。图2给出了滑跃甲板与平直甲板模型对比图。
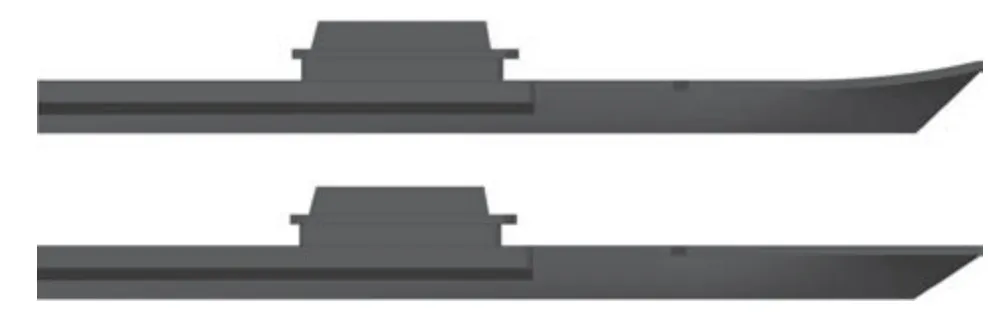
图2 滑跃甲板与平直甲板对比Fig.2 Comparison of the ski-jump deck and the flat deck
1.2 计算网格
图3 和图4 分别给出了舰尾流计算网格的远场网格情况及近场网格情况。网格总数约为700 万,外域为半球形,球面半径为3 000 m。外域前端距离舰体700 m,后端距离舰体5 000 m。外域后端距离舰体较远,有利于提高舰尾流的计算精度。计算中来流速度为30 kn。

图3 远场网格Fig.3 Mesh in the far field

图4 舰体表面网格Fig.4 Mesh on the carrier
CFD 计算过程中,数据监测点分布如图5 所示。其中,3 个绿色圆点为3 个理论起飞点;7 个红色方点位于航母理论下划线上,分别距离理论着舰点50 m、100 m、200 m、500 m、1 000 m、1 500 m 和2 000 m。通过对上述10 个监测点的3 个方向分速度进行检测,可以获得航母尾流的流动特性。10 个监测点编号及位置如表1 所示。

图5 监测点的位置Fig.5 Positions of the monitoring points
表1 监测点编号与位置Table 1 Index and position of the monitoring points
1.3 计算方法
1.3.1 主控方程
采用数值模拟方法求解Navier-Stokes 方程可以较为精确地分析流场的流动特性,是目前数值模拟复杂流场的主要方法,在航空领域获得了广泛应用。
质量守恒方程表达式为:
其中,S m为源项。
动量守恒方程表达如下:
其中:p为 静压;ρg和F为重力和外力矢量;为应力张量,表示如下:
其中:μ为分子黏性;I为单位张量。
1.3.2 湍流模型
舰尾流存在强烈的分离流动,非定常特性突出,湍流模型是捕捉这些特征的关键因素。虽然湍流可由Navier-Stokes 方程描述,但通过直接数值模拟(direct numerical simulation,DNS)计算航母的舰尾流是不可行的,因为所需的计算资源远远超过可用的计算能力。大涡模拟(large eddy simulation,LES)方法与DNS 方法相比,需要更少的计算资源,但需要非常精细的网格和较小的时间步长,这只能在非常小的几何尺度上实现。RANS 方法是CFD 模拟中使用最广泛的方法,具有合理的计算成本,但时间平均速度场和压力场求解会消除许多湍流结构,因此LES 方法和RANS 方法不适合本文的研究工作。
考虑采用脱体涡模拟(detached eddy simulation,DES)来平衡计算资源与计算精度之间的矛盾。在DES 方法中,边界层中采用非定常RANS 方法,分离流动区域内则采用LES 方法。采用LES 方法的区域通常是湍流流动的核心区域,大尺度非定常湍流流动起主导作用。在该区域内,DES 方法采用类似LES 方法的亚网格尺度模型。在近壁区域,则采用雷诺平均的N-S(Reynolds averaged N-S,RANS)方程,降低了对网格精细度的要求,能够有效减少计算网格数量,降低计算量。同时,在分离流动区域采用LES 方法,能够保证分离流动的计算精度。
根据Menter[21]的工作,对DES 湍流模型的湍流动能耗散项进行了修改:
图6 给出了采用DES 和RANS 方法计算得到的监测点6 的速度波动的对比。甲板风速为30 kn。可以发现,DES 方法的速度脉动强度比RANS 方法的强,这是因为DES 方法允许将大的涡结构分解为较小的尺度。这有助于更好地预测舰体后面的尾流,并进行频谱分析。
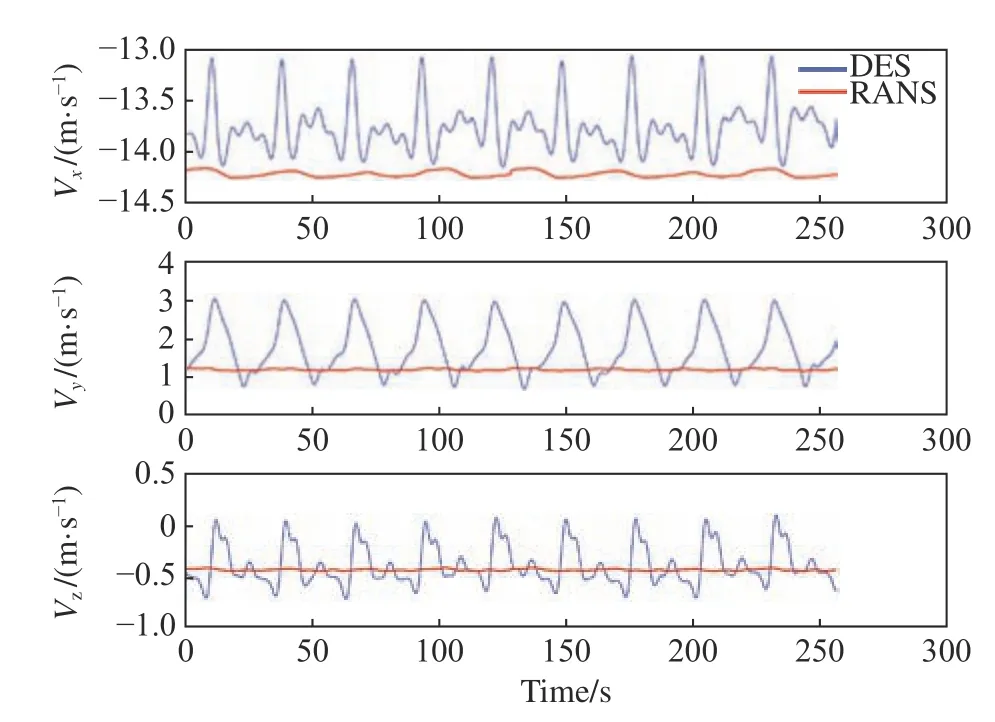
图6 不同湍流模型计算速度波动结果Fig.6 Velocity fluctuations computed with different turbulence models
图7 给出了不同湍流模型下尾流区涡量等值面计算结果。图7(a)是DES 方法的结果,图7(b)是RANS方法的结果。从图中可以看出,DES 方法可以捕捉到更多的旋涡结构细节,更适合本文的研究工作。

图7 不同湍流模型涡量等值面Fig.7 Vorticity iso-surfaces computed with different turbulence models
2 计算结果与分析
2.1 滑跃甲板的影响
图8 给出了30 kn 航速下,滑跃甲板与平直甲板涡量等值面。对称平面内速度云图和流线图对比如图9 和图10 所示。由图可见,在航母船艏存在一个较大的分离区,滑跃甲板的分离区比平直甲板的分离区大得多。与平直甲板相比,滑跃甲板会使飞行甲板上方的气流湍流度增加,非定常特征更明显。甲板前部边缘存在两个涡流区,滑跃甲板的边缘涡要比平直甲板的强烈得多。两个边缘涡流经3 个起飞点,影响起飞安全性。

图8 滑跃甲板和平直甲板涡量等值面Fig.8 Vorticity iso-surfaces between the ski-jump and flat decks

图9 对称面速度云图Fig.9 Velocity contours in the symmetry plane of the carrier

图10 对称面流线Fig.10 Streamlines in the symmetry plane of the carrier
图11 和图12 显示了在监测点1 和监测点3 有无滑跃甲板时的速度波动。对比发现,滑跃甲板显著增加了波动。关注图11 和图12 中速度的x分量Vx,可以发现,平直甲板在x方向上的平均速度大于滑跃甲板。这意味着,在相同航行速度下,滑跃甲板航母上的有效甲板风速度小于平直甲板航母的,不有利于降低舰载机的起飞速度,不利于提高起飞的安全性。表2给出了滑跃甲板和平直甲板之间Vx的差异。从表中可以发现,滑跃甲板的平均速度比平直甲板的低约1 m/s(1.9 kn)。飞机从航母起飞时的最大需用升力系数与速度的平方成反比。这意味着滑跃甲板对起飞存在一定程度的不利影响。

图11 监测点1 速度波动Fig.11 Velocity fluctuations at monitoring point 1

图12 监测点3 速度波动Fig.12 Velocity fluctuations at monitoring point 3

表2 不同监测点x 方向速度分量Table 2 x-velocities at different monitoring points
图13 和图14 给出了监测点1 和监测点3 有无滑跃甲板时的功率谱密度。由图可见,有滑跃甲板的速度分量功率谱密度均大于无滑跃甲板的。在监测点1,3 个速度分量的功率谱密度增大约40 dB。在低频段,监测点3 的差量小于监测点1 的差量,但趋势相同。

图13 监测点1 功率谱密度Fig.13 PSD at monitoring point 1 with and without the ski-jump

图14 监测点3 功率谱密度Fig.14 PSD at monitoring point 3 with and without the ski-jump
滑跃甲板不仅对甲板前部的起飞点有影响,对甲板后部和尾流区也有一定的影响。监测点4 位于着舰点后方50 m。图15 和图16 给出了监测点4 扰流速度的时域曲线和功率谱密度。可以看出,即使该点位于着舰点后方50 m,滑跃甲板的扰动强度仍高于平直甲板,滑跃甲板尾流扰动幅值比平直甲板高约10~20 dB。


图15 监测点4 速度随时间变化曲线Fig.15 Velocity variation with time at monitoring point 4

图16 监测点4 功率谱密度曲线Fig.16 PSD at monitoring point 4
2.2 柱状涡流发生器
根据上述研究结论,滑跃甲板对舰尾流具有较大的影响,能够显著增加扰动强度。因此,抑制上翘舰艏的分离,降低舰艏产生的涡流强度,具有重要的意义。本文提出了一种基于柱状涡流发生器(CVG)的滑跃甲板尾流抑制方法,可有效降低滑跃甲板的影响。采用的CVG 如图17 所示。
图17 柱状涡流发生器(CVG)Fig.17 Cylindrical vortex generator (CVG)
图18 给出了安装CVG 前后舰体对称面速度云图。由图可见,未安装CVG 时,滑跃甲板后方存在很大的分离流动区域,其尾迹覆盖整个甲板上方。安装CVG 后,滑跃甲板后方大范围的分离区域基本消失。图19 给出了甲板上方流线对比。可见,安装CVG 前,滑跃甲板后方气流紊乱,且湍流扫过整个甲板上方。安装CVG 后,甲板上方气流变为附着流动。

图18 安装CVG 前后对称面速度云图Fig.18 Velocities in the symmetry plane with and without CVG
图20 给出了舰艏局部流线对比,可见未安装CVG时,气流翻越舰艏后迅速分离,形成很大的回流区,对整个甲板上方气流产生较大扰动。图21 给出了CVG内部流线侧视图。图22 给出了航母安装CVG 前后涡量等值面的对比情况。由图可以看出,增加CVG后,气流向上翻越舰艏时进入CVG 内部空间,在CVG的约束下形成内部旋涡,旋涡从CVG 排出,从而在滑跃甲板两侧形成强而稳定的旋涡(这两道旋涡比未安装CVG 时更强)。滑跃甲板上表面绕流则由无CVG 时的分离流转变为附着流,从而基本消除了甲板前端的分离区,使得甲板上方流速更加稳定,降低了对舰载机的干扰,有利于提高舰载机起飞安全性。

图20 安装CVG 前后舰艏局部流线Fig.20 Streamlines around the bow with and without CVG

图21 CVG 内部流线侧视图Fig.21 Side view of streamlines inside CVG
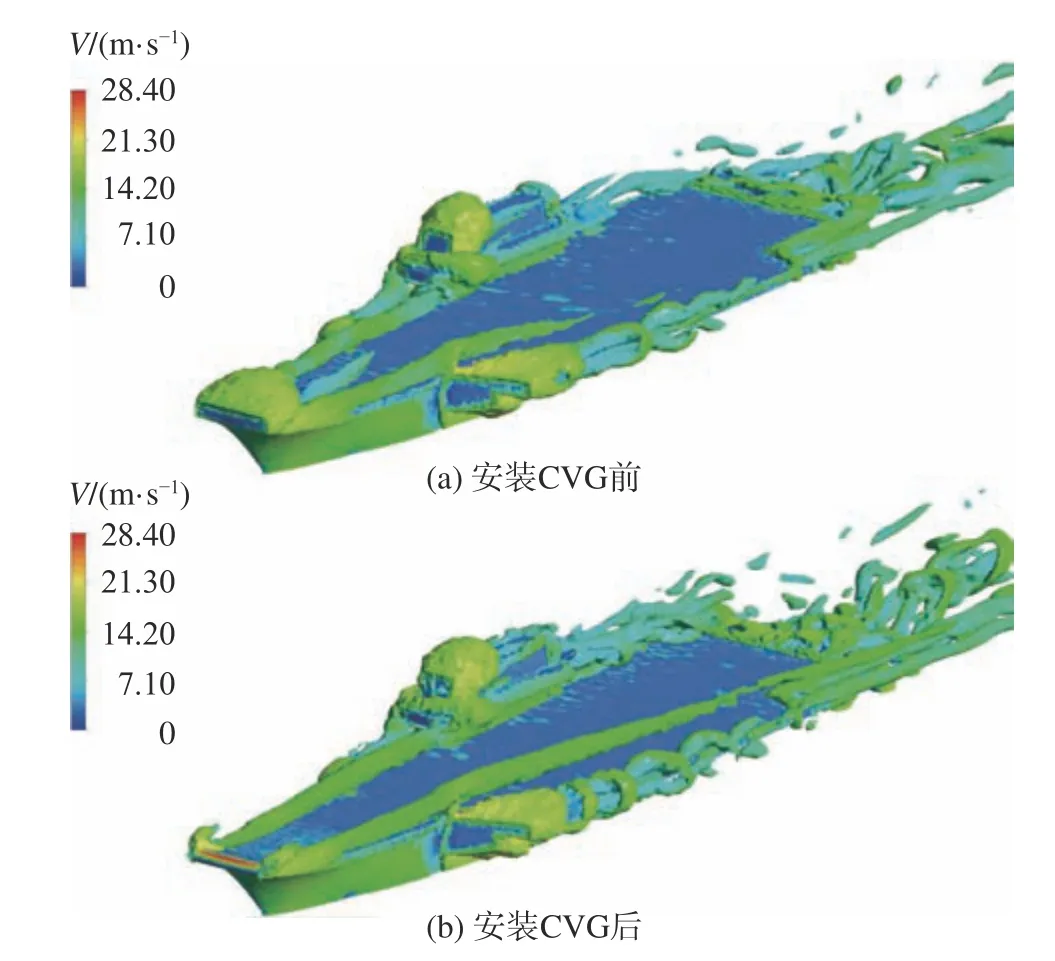
图22 安装CVG 前后涡量等值面Fig.22 Vorticity iso-surfaces with and without CVG
图23 和图24 给出了起飞点1 气流速度随时间的变化关系以及功率谱密度曲线。可以看到,增加CVG 后,起飞点1 各向分速度的震荡幅值均大幅减小。增加CVG 后Vx的功率谱密度降低约30 dB。而且由于消除了舰艏分离区,甲板不再被尾迹区覆盖,因此甲板上x向分速度均值较无CVG 时有较大幅度提高。无CVG 时,Vx均值为13.44 m/s,增加CVG 后,Vx均值增加为14.48 m/s。
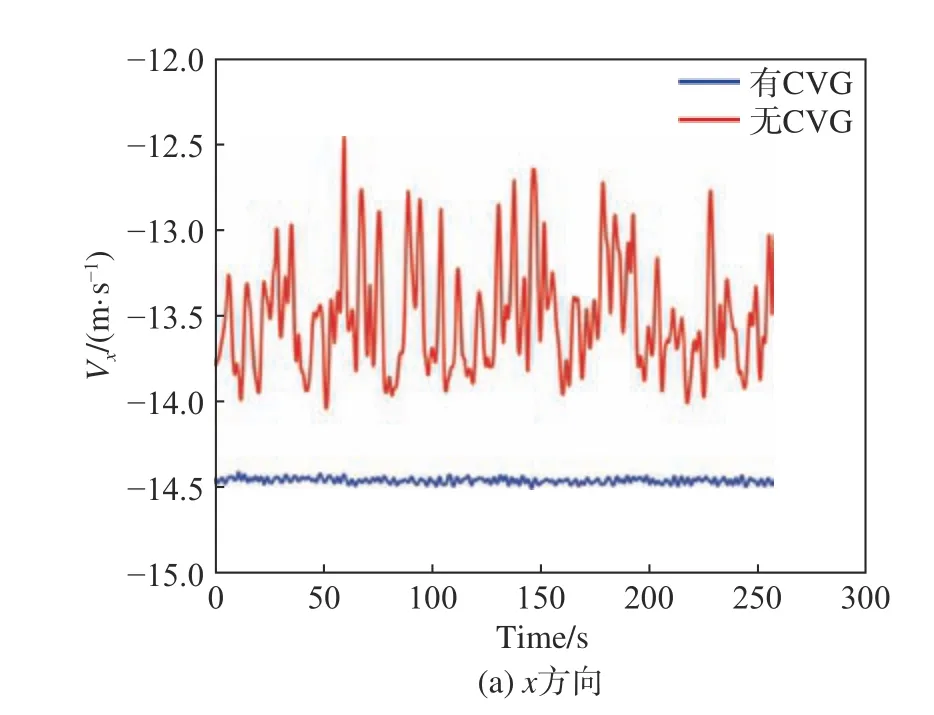

图23 监测点1 速度随时间变化曲线Fig.23 Velocity variation with time at monitoring point 1


图24 监测点1 功率谱密度曲线Fig.24 PSD at monitoring point 1
图25 和图26 给出了起飞点3 气流速度随时间的变化关系以及功率谱密度曲线。可以看到,增加CVG 后,起飞点3 的x和y向分速度的震荡幅值大幅减小。起飞点3 处,增加CVG 后Vx的功率谱密度降低约20 dB。甲板上x向分速度均值较无CVG 时提高。无CVG 时,Vx均值为14.03 m/s,增加CVG 后,Vx均值增加为14.58 m/s。同时可以看到,增加CVG 后,起飞点3 处y向气流速度绝对值增加,但是波动幅度减低。这是由于CVG 两侧排出的旋涡强烈而稳定。该旋涡加强了气流的侧洗,使得y向速度绝对值增加,但是由于该涡比无CVG 时的边缘涡稳定,因此速度波动幅度降低。

图25 监测点3 速度随时间变化曲线Fig.25 Velocity variation with time at monitoring point 3

图26 监测点3 功率谱密度曲线Fig.26 PSD at monitoring point 3
综上可见,增加CVG 可大幅降低滑跃甲板上表面气流各向分速度的震荡幅值,各向分速度均值较无CVG 时有较大幅度提高。这意味着,增加CVG 可增加甲板上方气流流动的稳态分量,同时减弱瞬态分量,降低波动幅值,使得气流速度更加稳定,这对提高舰载机起降过程的安全性有较高价值。
CVG 不仅对降低起飞点处的速度波动有益处,对着舰点附近气流扰动也能起到很好的抑制作用。图27 和图28 给出了监测点4 处气流速度随时间的变化关系以及功率谱密度曲线。可以看到,着舰点附近气流各向扰动速度均大幅降低,气流更加稳定。有CVG 时Vx的功率谱密度较无CVG 时的约降低20 dB,达到与平直甲板相当的水平。另外,x向分速度均值较无CVG 时有较大幅度提高。无CVG 时,Vx的均值为14.51 m/s;有CVG 时,Vx的均值为15.72 m/s。更高的水平速度分量,可以降低舰载机着舰时的啮合速度,提高着舰安全性。

图27 监测点4 速度随时间变化曲线Fig.27 Velocity variation with time at monitoring point 4

图28 监测点4 功率谱密度曲线Fig.28 PSD at monitoring point 4
3 结论
本文对平直甲板和滑跃甲板尾流进行了数值模拟,并提出了一种基于柱状涡流发生器(CVG)的滑跃甲板尾流抑制方法。在30 kn航速条件下,研究得出以下结论:
1)滑跃甲板降低了甲板上表面气流平均速度,在起飞点1 处,x方向平均速度降低了约1 m/s。同时,速度的波动幅度大幅增加。与平直甲板相比,速度波动功率谱密度增大约40 dB。滑跃甲板对下滑线上气流也有较大影响,距离着舰点50 m 处,x向速度波动功率谱密度增加约20 dB。
2)CVG 对于降低滑跃甲板造成的气流波动具有较好的效果。增加CVG 后,起飞点1 附近气流x速度分量增加约1 m/s,速度波动功率谱密度降低30 dB,恢复到与平直甲板相当的水平。下滑线上气流速度波动功率谱密度降低约20 dB,基本与平直甲板情况相当。
3)CVG 两侧排出的旋涡强烈而稳定。该旋涡从甲板上方扫过,会增加气流侧洗,增加y向速度绝对值,但使得速度波动幅度减弱。
综上所述,CVG 可以有效提高起飞点和下滑线上的x方向速度分量,降低对舰载机起降速度的要求。同时,速度波动幅度降低,有利于舰载机更精确的进行航迹控制。因此可见,CVG 对于降低舰尾流强度、提高舰载机起降安全性有重要意义。
