舰载直升机-舰船耦合流场数值计算研究综述
2023-04-08王逸斌马晨阳朱春玲
王逸斌,马晨阳,李 通,赵 宁,*,朱春玲
(1.南京航空航天大学 非定常空气动力学与流动控制工业和信息化部重点实验室,南京 210016;2.中国船舶集团有限公司 系统工程研究院,北京 100094)
0 引言
随着我国海洋安全意识的不断增强,海军的发展与海洋战略也愈加受到重视,载机舰这类现代海军主力海上装备得到了迅猛发展。载机舰是以携带一定数量舰载机为主要武器的大型水面作战舰船,它攻防兼备、舰机一体、海空并制、机动性强,拥有全面的作战打击能力,在海洋作战中有很强的实战能力和威慑作用。近年来,我国加强了海军力量建设,各种先进的作战舰船陆续下水服役。中国第一艘航空母舰“辽宁号”于2012 年正式交付中国人民解放军海军,我国海军从此进入航母时代。2017 年,我国055 大型驱逐舰首舰在上海江南造船厂下水。同年,我国首艘自主设计、研发和建造的国产航母于大连正式下水,并于2019 年12 月交付海军,命名“山东舰”。2020年9 月25 日,我国第一艘两栖攻击舰075 型下水。2021 年4 月23 日,中国自主设计的大型两栖攻击舰船“海南舰”正式入列中国人民解放军海军。这些载机舰船的列装,使得海军武器装备体系逐步现代化和完备化,中国海军成为当前复杂国际环境下保护中国海上安全和利益的坚实后盾。
无论是航母还是两栖攻击舰或其他载机舰,舰载机是必不可少的装备。舰载机的起降离不开舰船甲板等固定起降区域,但是由于受甲板起降点的有限尺寸、海面自然风、舰面湍流(包含上层建筑尾流、舰艏涡等)以及船舶运动的综合影响,舰载直升机起降成为了极具挑战性的海上作业,其危险系数远远高于普通地面起降。而直升机在舰船甲板上进行起降作业时,旋翼的下洗涡系与舰面的尾流涡系存在相互干扰与掺混,特别是在多机起降时,旋翼与旋翼之间的涡流也会形成相互干扰,从而造成更为复杂的混合涡流区,这些都会对直升机等舰载旋翼类飞行器的安全起降作业造成不利影响,甚至会危及飞行员的生命安全。因此,有必要充分认识舰船飞行甲板上方空气流场的特性、舰载机-舰船耦合流场的特性,以及流场对舰载直升机起降安全的影响。
本文从舰船表面流场特性分析入手,分别分析了航空母舰类(航母、两栖攻击舰等)和非航空母舰类(护卫舰、驱逐舰等)的舰面流场主要特征;并进一步分析了直升机尾流及其与舰船耦合流场的流动特征。在此基础上,整理分析了国内外关于舰船表面空气流场的数值计算研究,以及舰载直升机-舰船耦合流场的数值计算研究,并给出了相关结论。
1 机-舰耦合流场特征
1.1 孤立舰船流场特征
对于驱护舰之类的非航空母舰类舰船,主要搭载舰载直升机,飞行甲板位于机库后方,起降区的流场主要受上层建筑和机库后方的涡流区影响。这类舰船机库后方飞行甲板的流场结构与后台阶的流动结构相似,国内外采用试验与计算的方法对这类基本的流动结构开展了探索[1-9]。图1 为二维后台阶流动的主要流动特性,其主要包括台阶后方的大范围回流区以及非定常自由剪切层。流动在台阶边缘发生了流动分离,并伴随着非定常剪切层,随后气流在台阶下游壁面上再附。如果从三维流场的角度来观察上层建筑与机库周围的流动结构,则可以把它们近似简化成一个三维钝体,其主要的流动结构见图2。从图中可以观察到,钝体后方的流动与二维后台阶近似,但是由于存在三维效应,可以看到在钝体后方存在一个近乎与地面相接的反“U”形涡。虽然实际中的上层建筑比钝体模型或者后台阶模型都要复杂,但是其基本的流动结构是相似的(见图3中所示的SFS2 模型后方的流线图),而机库后方的飞行甲板区域往往较小,因此直升机的降落位置很有可能位于再附区域或者回流区,这会增加舰载直升机降落的难度。

图1 二维后台阶的流动结构示意图[10]Fig.1 Flow structure of a two-dimensional back facing step[10]

图2 三维钝体流动结构示意图[11]Fig.2 Flow structure behind a three-dimensional bluff body[11]

图3 SFS2 模型机库后方回流区[12]Fig.3 Recirculation zone behind the hangar of the SFS2 model[12]
对于两栖攻击舰,其起降平台不再限于上层建筑后方,而且其直通式甲板的设计,可使气流自舰艏无阻碍地流向舰艉,因此其表面的主要流场特征结构包括:舰艏涡流A,舰舷涡流B,舰岛涡流C,舰艉涡流D(图4)。气流自舰船前方流向舰艏,类似于钝体的绕流,但是由于舰艏的特殊几何结构,在其后方的甲板上会形成较大面积的流动分离,往往还会形成环状的涡结构(见图4 中的舰艏涡A),该涡环会随着气流一直向下游运动,这是与驱护舰等舰船流场的主要不同之处。
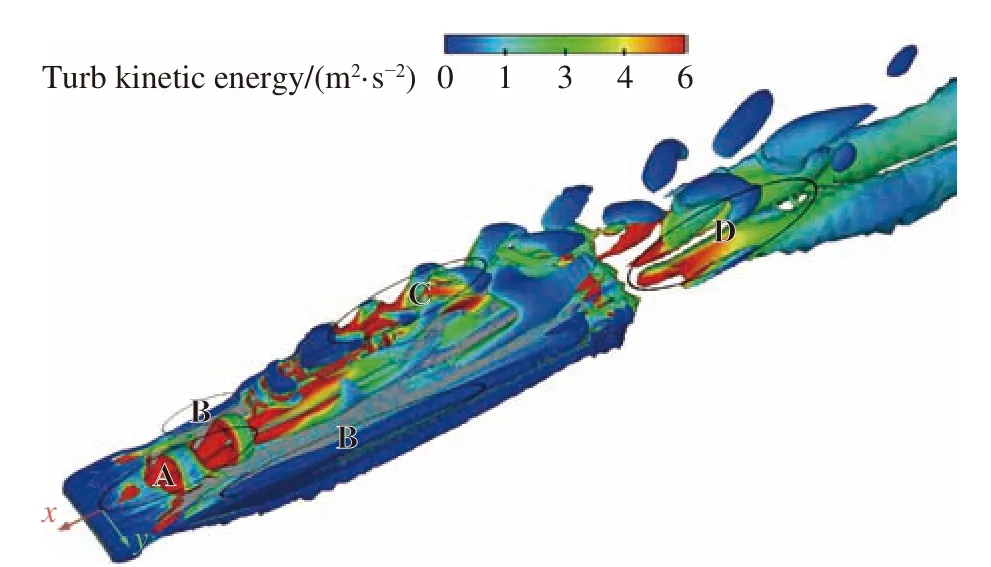
图4 航空母舰类战舰舰面主要涡流[13]Fig.4 Main eddy structures on a carrier[13]
1.2 直升机尾流与舰船耦合流场特征
旋翼飞行器主旋翼桨叶旋转过程中产生的尾迹涡由强烈的桨尖涡流和内在涡流叠加而成,二者方向通常相反[14]。当旋翼旋转时,气流流经桨叶表面,桨叶末端会脱落出桨尖涡。在悬停状态下,桨尖涡会逐渐往下运动,形成如图5 所示的螺旋状尾迹。旋翼前飞时,脱落的尾迹涡流相对于旋翼自身向后运动,形成如图6 的涡流尾迹。当舰船航行时,舰载直升机悬停于舰船甲板上方,其实际处于低速前飞状态。
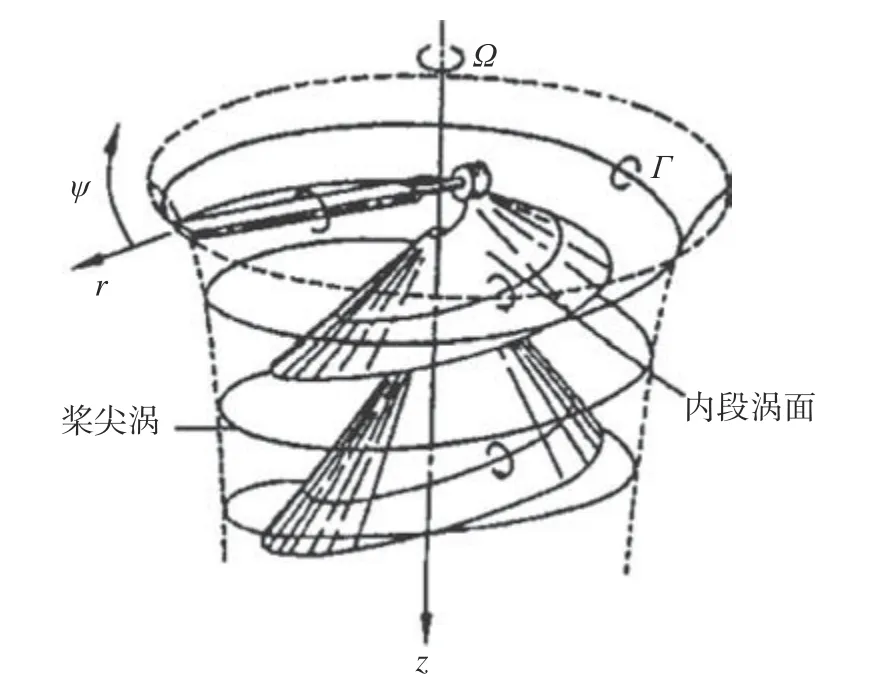
图5 悬停状态下尾迹示意图[14]Fig.5 Schematic diagram of the helicopter wake in hovering state[14]

图6 低速前飞状态尾迹涡流结构[15]Fig.6 Wake vortex structures during the low-speed forward flight[15]
舰载直升机-舰船耦合流场中包含了直升机流场与孤立舰船流场的全部流动特征,但两者间并不是简单的叠加(见图7)[16],舰面的流场结构直接影响旋翼的气动力,而旋翼产生的下洗气流又会改变舰面分离区与再附位置,因此两者间存在复杂的相互耦合干扰。


图7 涡量等值面与流线对比[16]Fig.7 Comparison of vorticity iso-contours and streamlines[16]
图8 为转自利物浦大学官网的舰载直升机尾流与舰船表面流场耦合流场结构示意图[17]。其中对直升机影响最大的,主要还是上层建筑尾流与旋翼尾流的相互干扰。以SFS2 模型为例,一方面旋翼诱导的下洗流动会挤压机库后方的回流区(见图9 和图10),另一方面机库后方原有的流动也会对旋翼的气动力造成影响(见图11)。另外,海上舰船往往伴随着横摇、纵摇以及垂荡运动,船身的这些运动会直接改变甲板面上的气流垂向速度,从而影响旋翼气动力。

图8 典型机舰耦合流场特征[18]Fig.8 Characteristics of the typical ship-helicopter coupling flowfield[18]
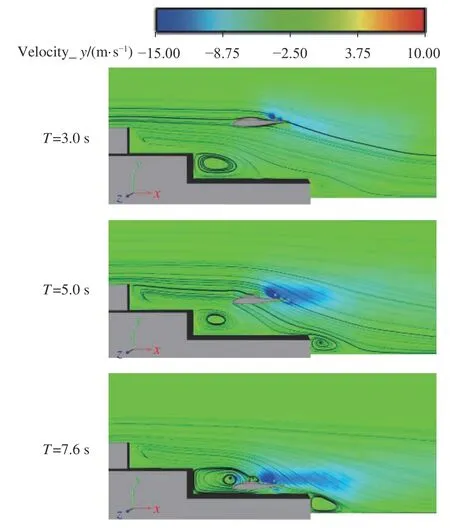
图9 舰载直升机尾流与上层建筑尾流干扰[15]Fig.9 Interaction between the shipborne helicopter wake and the superstructure wake[15]

图10 不同时刻过旋翼中心y 截面垂向速度流线图及甲板表面压力云图[12]Fig.10 Vertical velocity contour and streamlines in the middle plane cutting through the rotor center and surface pressure on the ship deck at different time instances[12]

图11 某旋翼拉力系数随降落时间变化曲线[12]Fig.11 Variation of the thrust coefficient of a rotor with the landing time [12]
对于两栖攻击舰,由于其起降点不仅仅位于舰岛后方,而当直升机位于不同起降点时,其耦合流场也存在一定差别。在正顶风时,当直升机在远离舰艏的甲板位置进行起降作业时,舰艏处形成的涡环会冲击左舷处起降的直升机(见图12a)。但是,若直升机悬停在靠近舰艏的起降点位置时,由于直升机旋翼的阻碍和下洗流的冲击,舰艏的涡环结构被完全抑制,舰艏的分离流动被下洗气流挤向右舷(见图13)。另外,当右舷来流时,如果直升机位于上层建筑尾流内,其耦合流场与驱护类舰船的耦合流场主要特征相似(见图12b)。

图12 LHA 与旋翼耦合涡结构[12]Fig.12 LHA and rotor coupled vortex structure[12]

图13 旋翼抑制舰艏涡环[12]Fig.13 Bow vortex ring suppression due to the rotor[12]
目前为了舰载直升机海上作业安全,各国均制定了相关的规范标准,其中英国的CAP 437 标准中对舰载直升机的起降流场给出了明确的量化指标—在直升机起降区域内,垂向速度标准差应小于1.75 m/s[18]。而在CFD 数值模拟中,基于湍流应力各向同性的假设,该标准则可以釆用湍动能来体现,即湍动能不大于4.59 m2/s2,其等价于CAP 437 的判定准则[19]。
2 孤立舰船舰面空气流场数值计算研究
目前研究舰船空气流场主要有三种方法:实船测量、风洞试验和CFD数值模拟。实船测量可以获得最真实的数据,但由于受到测量手段和海上条件的限制,仅能获得有限的数据,且时间周期和经济成本极大;风洞试验方法可以获得缩比模型的准确流场数据,相较于海上实测其测量手段更加丰富,借助于PIV 等手段可以获得精细的流场结构,但是对于机-舰耦合流场其相似性的匹配与满足仍存在问题;数值模拟方法可以计算获得详细的流场,但是其计算方法与计算结果需要前两种方法加以验证。因此,三种方法各有优缺点,互为补充。
20 世纪90 年代,研究者开始大量应用CFD 数值模拟研究舰船流场,早期的研究主要针对定常流场,之后随着数值计算方法的发展,逐渐转向非定常流场。对于舰船表面空气流场这类大雷诺数流动问题,主要采用的方法有雷诺平均(RANS)方法、大涡模拟(LES)方法和RANS-LES 混合方法。而直接数值模拟(DNS)方法由于其计算代价太大,目前尚未见这方面的公开研究。工程计算中采用比较广泛的方法主要是前两种。
2.1 定常数值计算研究
在数值模拟计算方面,早期的数值计算方法对于处理大雷诺数黏性问题与大分离流动问题存在较大的困难,因此往往采用简化模型开展计算。而正式运用现代CFD 方法进行舰船空气尾流场的研究始于以美国为代表的欧美国家。20 世纪90 年代,美国海军水面作战中心和海军航空作战中心开始对“斯普鲁恩斯”级大型驱逐舰进行空气尾流场研究[20]。通过对比计算结果和试验结果,初步确定了数值计算方法获得的流场结构与风洞试验结果相似。
20 世纪末到21 世纪初的舰面流场数值计算研究主要采用RANS 方法求解定常流场,其采用的舰船模型主要为SFS 和SFS2。这两个舰船模型是美国、加拿大、英国、澳大利亚和新西兰合作项目(TTCP)中为开发舰船尾流验证数据库而设计的。SFS2 是在原始SFS 的基础上加长了上层建筑并增加了三角形舰艏[21-22],如图14 所示。之后,加拿大国家研究委员会(NRC)对这两种简化舰船模型进行了一系列风洞试验[23]。目前的舰面空气流场研究,往往采用该模型作为标模来验证数值计算方法的准确性和可靠性。

图14 SFS 和SFS2 的几何模型示意图[22]Fig.14 Geometric models of the SFS and SFS2 [22]
2000 年,Reddy 等[24]使用商业软件Fluent 对简化护卫舰SFS 进行了定常状态下的舰面流场数值模拟,计算使用结构网格和k-ε湍流模型,研究结果表明,飞行甲板上的流场主要受回流区和脱落的涡结构影响,流动特征与试验以及其他公开结果较为一致,但是再附点和涡的位置有所不同,他们同时也认为计算结果对网格密度的依赖程度较大。Tai[25]在2001年也开展了类似的研究,其采用了包含120 万单元的结构网格开展了数值计算研究,他们认为SFS 模型由于没有舰艏结构所以流场更易于分离,因此在SFS前面加上了一个舰艏。Yesilel 等[26]也通过对比SFS和SFS2 的计算结果,再次确认了舰艏的存在对于舰面流场分离特性的重要性。现在的舰面流场研究中,往往采用SFS2 模型作为标准算例来验证算法和解算器[27]。2005 年,Woodson 等[28]通过CFD 方法和风洞试验对海军驱逐舰DDG-81 进行了舰面流场研究,认为CFD 方法在不同风向角下,能够成功预测舰船周围的真实流场,为CFD 成功地应用于舰面流场模拟提供了依据。至此,采用数值计算对舰船表面流场开展分析的方法,基本被工业界普遍接受。定常RANS方法也被大量应用到孤立舰船表面流场研究分析中。
2006 年,吴裕平[29]通过CFD 数值模拟求解各种风速和风向下的甲板定常流场,给出了甲板流场的速度矢量图,并与试验结果进行了对比分析,认为CFD 技术获得的速度场分布可以用于直升机舰面起降风限图的计算。针对风洞缩比模型造成的雷诺相似性无法满足问题,中国舰船设计研究中心的陆超等进行了一系列的舰面流场数值模拟研究[30-33]。通过大量的数值计算并结合风洞试验数据,发现舰船缩比模型造成的雷诺相似性不匹配并不会严重影响舰面流场结果。
哈尔滨工程大学的郜冶、刘长猛和王金玲等采用数值计算方法开展了SFS2 简化模型、LHA 两栖攻击舰和CVN 航母的空气尾流场研究[34-41],内容涉及湍流模型及网格划分方法,不同甲板风状态、大气边界层条件及舰船几何特征(机库门开闭不同状态、机库顶部不同倾角、机库侧面不同过渡弧度、不同机库高度及不同飞行甲板长度、LHA 舰艏导流板倾角)对流场特性的影响等。他们采用的数值计算方法为定常RANS 方法,虽然计算结果与试验结果一致,但是回流区内速度场的分布与试验结果仍存在一定差别。以SFS2 为例(见图15),尽管采用了270 万网格,但是流向速度与试验值存在较明显的偏差,类似的现象也出现在其他作者的文献中[42-43]。通常RANS 方法求解大分离流动问题普遍存在较大误差,另外舰船流动本身是非定常流动,因此必然存在一定误差。Polsky[44]在她的研究中对比了LHA 舰船定常RANS结果与MILES 时均计算结果,发现定常计算的结果与试验结果及时均结果不能完全相符,特别是y向速度v,存在巨大的偏差(见图16)。她认为造成这一现象的原因在于定常计算中采用了当地时间步长这一加速收敛技术。对于本质上非定常的流动,采用当地时间步长求解其定常的时均解,必然造成非物理的错误。
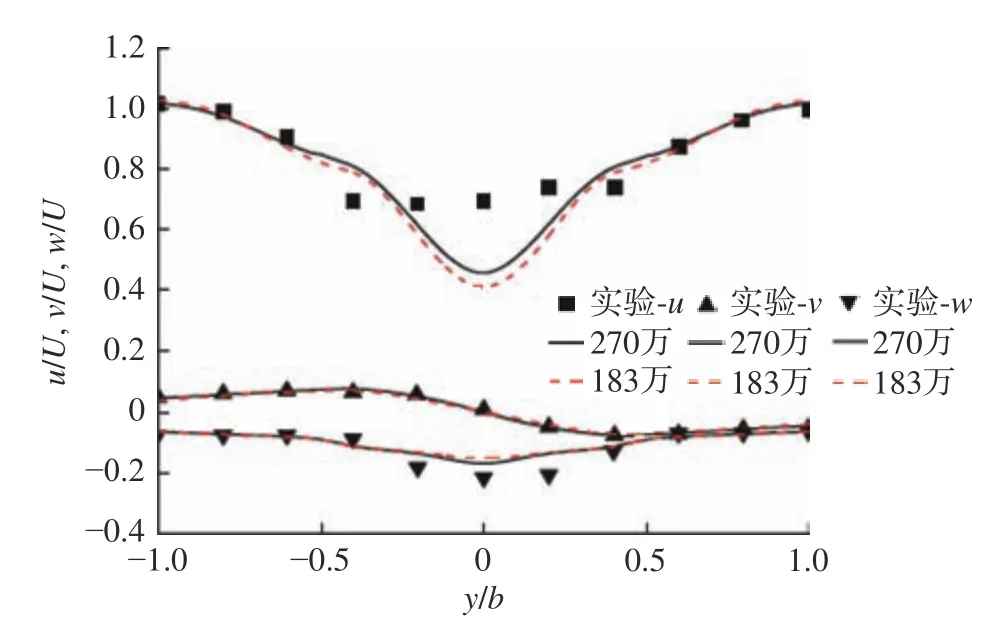
图15 SFS2 定常计算结果对比图[37]Fig.15 Comparison of the steady flow computation results for SFS2 [37]
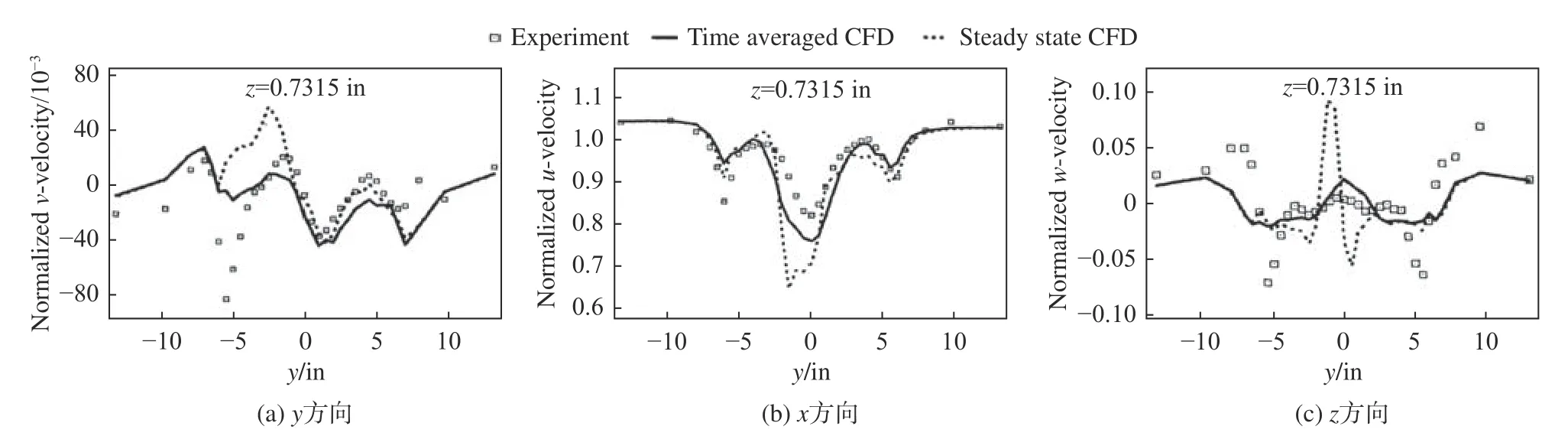
图16 定常计算结果、非定常时均结果与试验结果对比[44]Fig.16 Comparison among the steady,time averaged unsteady and experimental results[44]
以上的研究表明,在工程设计阶段的初期,采用RANS 方法求解舰船表面的定常流场,可以在保证计算效率的同时基本满足工程需求,并可得到工程问题的初步结果。但是采用定常计算,对于舰船这类大分离流动问题,往往存在一定的偏差,因此,对于舰船表面流场结构的精细化研究,必须要开展非定常流场的数值计算研究。
2.2 非定常数值计算研究
2.2.1 无黏流场方法
1998 年,受限于当时的计算机技术,Liu 等[45]采用无黏流场解算器结合非线性扰动方程(NLDE)研究舰面流场的非定常特性,其中无黏解算器提供稳态的流场数据,NLDE 则基于稳态流场变量计算获得脉动量。他们的计算结果与Healey[46]的结果相似,但是无黏解算器的使用还是造成了物面附近速度分布的不一致。2001 年,Sharma 和Long[47]使用类似的方法研究了LPD-17 舰船上0°和30°风向角下的非定常流场。虽然舰船上的流动是强湍流且边界层不可忽略,但是由于舰船上的建筑都有着尖锐的边缘,舰面流场中的主要特征,如脱落的涡结构等,均在计算中被捕捉到,且计算结果和风洞试验结果基本吻合。但是计算结果低估了尾流的大小,他们认为这是由于时间步长与网格空间尺度的不匹配造成的。从横向速度与垂向速度的频率谱中,他们发现涡脱落的斯特劳哈尔数St在0.2~0.25 之间。Seaer-Uzol 等[48]再次使用该技术对比研究了LHA 和LPD-17 的舰面流场,计算结果表明,在风向角30°时,尾流的脉动强于正顶风来流情况。计算也获得了这两艘船尾流的主频,其中LHA 的主频在0.1~0.5 Hz 之间;而LPD-17 则存在0.2 Hz 和0.5 Hz 两个主频,前者由桅杆造成,后者由机库右舷侧边缘造成。
但是,这类依赖于无黏流场解算的方法也受到了质疑。Zan[49]就质疑了采用无黏流场解叠加由流场梯度产生的非定常性的做法,并认为Bogstad 等[50]计算结果与Polsky 等[51]采用N-S 方程求解获得的计算结果并不一致。
2.2.2 URANS 方法
早期常规的研究舰船表面的非定常流场数值计算方法,主要还是依赖于URANS 方法求解非定常N-S方程。例如,Zhang 等[52]采用Cobalt 解算器研究了非定常船舶空气尾流,他们采用了1∶100 的SFS2 缩比模型,其计算结果与Cheney 和Zan[23]报告中的风洞试验结果相当吻合。但是对于SFS2 这种对称的几何模型,其报告的计算结果却显示出不对称的流场结构。许多研究人员[44,53-54]认为流场的这种不对称行为可能归因于求解器的数值误差。
2015 年,Shukla 等[55]开展了URANS 方法与定常RANS 方法在舰面流场计算中的比较。他们评估了URANS 方法捕捉舰船尾流非定常特征的能力,并检验了URANS 数据用于舰船-直升机动态界面飞行模拟的可行性。通过对SFS 模型进行全尺寸时间精确数值研究,并与定常RANS 数据进行比较,发现URANS 方法可以较好地捕捉舰船空气尾流结构的非定常特性,用于飞行模拟是可行的。然而,由于基于RANS 模型的时间平均方法的局限性,它无法有效地解析主频。刘长猛[37]采用SFS2 模型也对比了定常/非定常RANS 计算结果与试验结果(见图17),从他的结果中可以发现采用URANS 方法虽然可以略微提高计算准确度,但是RANS 方法与试验结果仍存在一定的差距。Polsky[53]也认为RANS 类方法对于舰船流场这种大流动分离问题存在较大的误差,其误差通常大于其他来源引入的误差,如数值格式、计算网格、边界条件等。
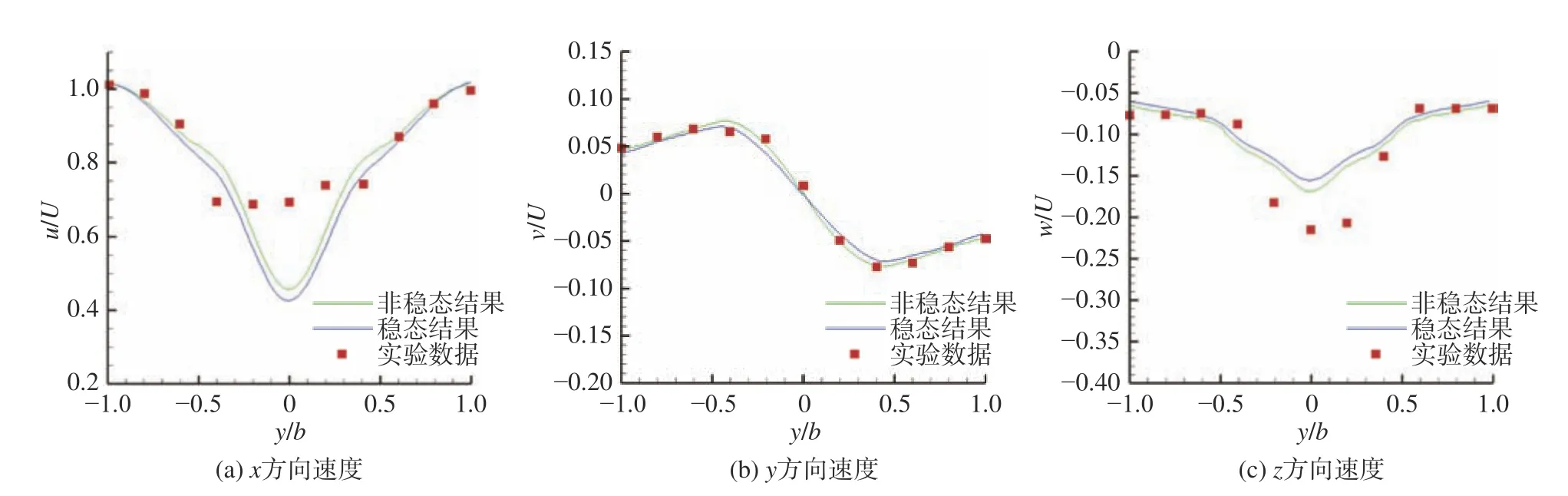
图17 定常/非定常RANS 计算与试验结果对比(根据文献[37]重绘)Fig.17 Comparison between the steady/unsteady RANS computational result and the experimental result(adapted from reference[37])
近两年,李通等[42,56]通过改变简化护卫舰(MSFS)机库尺寸,分别对静态和动态舰船甲板上方的流场进行了数值模拟计算,得到了机库后方回流区长度和机库尺寸的变化规律,进一步分析了静态舰面流场和动态舰面流场之间的差异,认为静态舰船中的流场数据不能完全反映出动态舰船中的流场特性;同时,基于两栖攻击舰模型,将不规则的纵摇运动简化为具有周期性的简谐运动[57],采用CFD 方法分析了纵摇状态下两栖攻击舰甲板上方涡结构的演化规律以及舰船纵摇周期和振幅的突变对流场结构带来的影响。
可见,采用URANS 方法可以获得优于RANS 方法的计算结果,但是限于RANS 类方法对于大分离强湍流问题处理的弱势,其计算结果仍与试验值存在差别,因此有必要采用更加准确的湍流模型来研究舰船表面流场。对于工程中关心的一些舰船动态问题,例如舰船的摇摆升沉运动造成的流场影响等,则可以采用URANS 方法进行计算。
2.2.3 大涡模拟方法
大涡模拟方法(LES)对大涡直接解析,可以准确捕捉大涡结构;对于小涡,则采用亚格子模型模化,因此其计算量小于DNS;而对于湍流问题,其计算精度远高于RANS 方法。Polsky 等在2000 年之后就对直升机攻击舰(LHA)舰面非定常黏性流场开展了大量研究[44,51],采用COBALT 的MILES 非结构网格解算器,对多个不同风向角、不同来流风速的流场展开了数值计算研究。研究表明,随着风向角的变化,舰面流场的流动结构存在很大差别,因此舰面风向角是决定舰面流场特征的关键因素之一。通过对比定常流场计算结果与非定常流场计算结果,发现前者与后者的时间平均结果并不一致。而对比MILES 与URANS 结果,则发现采用URANS 计算获得的频率特性中,高频区域几乎被抹平了。
2003 年,Polsky[53]进一步扩展了其研究工作,对横风(右舷或左舷90°风)条件下的非定常尾流开展了深入的数值计算研究。研究对象分别为横风条件下的1∶100 SFS 缩比模型和全尺寸美国海军LHA 级舰船,其中SFS 数值结果与NRC 风洞试验数据进行了比较,LHA 结果则通过海上测量结果[51]进行了验证。研究表明,横风条件下舰船表面流场依旧伴随着复杂的流动结构,而在计算中是否考虑大气边界层的影响也将严重影响计算结果的准确度。另外,他们还对比了不同网格下流场的频率特性,发现网格对MILES 计算结果的影响巨大,因此认为MILES 方法虽然可以获得更准确的流场结果,但是网格依赖性较大(见图18)。
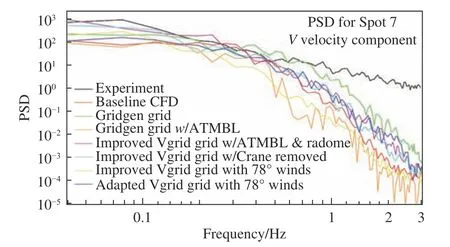
图18 不同网格PSD 对比[53]Fig.18 Comparison of PSD for different grids [53]
2010 年,Thornber 等[58]采用隐式大涡模拟(ILES)方法研究了船舶空气尾流场。由于舰船表面流动的雷诺数高,为了满足计算分辨率要求,全尺寸船舶尾流的ILES 模拟是一项具有挑战性的任务。ILES 是一种高阶有限体积格式,用于捕获惯性范围内的无黏动能级联,而固有的数值耗散则充当隐式子网格模型,形成了一种自然形式的大涡模拟。这种方法于2000年初由Grinstein 和Fureby[59]、Visbal 等[60-61]提出。通过试验数据和计算数据的对比,发现在0.1~10 Hz 的频率范围内两者一致。此外,他们还验证了雷诺数Re在一定范围内变化时,流场对Re变化不敏感的现象。通过对比10 kn、30 kn 和50 kn 风速下的流场,在采用相对速度无量纲化后,计算获得的流场是自相似的(图19)。

图19 不同相对风速下的速度和功率谱对比[58]Fig.19 Comparison of the velocity and PSD under different relative wind speeds [58]
Li 等[43]采用SFS2 模型对比了LES 方法与DES方法的计算结果。他们首先采用600 万网格进行比较,其中DES 结果更接近于试验结果。随后采用900 万网格开展了LES 计算,其计算结果准确度进一步提高,但仍略劣于DES 的计算结果(图20 为LES方法与DES 方法计算结果的对比)。因为LES 方法对网格的要求较高,尽管理论上LES 方法的精度高于DES 方法,但是在网格数量有限的情况下,DES 方法获得的结果反而优于LES 方法的。
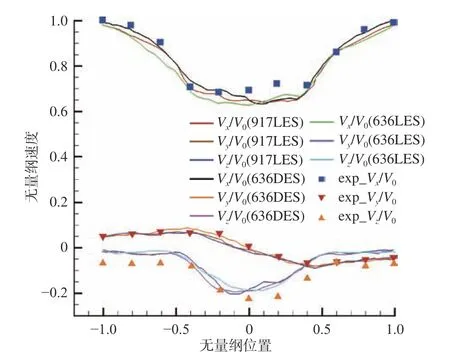
图20 LES 与DES 计算结果对比(根据文献[43]重绘)Fig.20 Comparison of the computational results between LES and DES (adapted from reference [43])
2017 年,宗昆等[62]利用MILES 方法对SFS2 的流场进行数值模拟,发现MILES 方法与RANS 方法均能得到与风洞试验变化规律相同的时均流场结果。但MILES 对尾流场的预测精度相对更高,且能得到空气流场的瞬时特性,可用于更精确地分析舰船空气流场。另外通过与PIV 试验结果对比,可以发现采用SA 模型的定常RANS 方法获得的分离区明显偏大,而采用MILES方法获得的时均流场中其分离区大小与试验结果基本一致(见图21)。
从以上的研究中可以发现,采用LES 方法对舰船表面空气流场开展研究,可以获得较RANS 方法更准确的流场精细结构,另外采用LES 方法可以获得速度脉动量从而准确计算垂向速度的标准差以检验CAP437 的流场要求。但是LES 本身对网格的要求极高,大大限制了其在工程问题中的应用,因此目前开展舰面流场精细结构的研究主要采用DES等RANSLES 混合方法。
2.2.4 RANS-LES 混合方法
RANS-LES 混合方法的中心思想是发展介于RANS 与LES 间的一类湍流模拟计算方法,它具备接近于LES 方法的计算精度,但是其计算量又远小于LES 而接近于RANS 方法。在这类方法中最著名的是DES(detached eddy simulation)方法,它是由Spalart等[63]在1997 年提出的。之后,他们逐步改进该方法,在此基础上又发展了DDES[64]与IDDES[65]方法,进一步解决了DES 方法对网格密度的依赖性问题。目前由于分离涡模拟(DES)方法能够比较准确地捕捉钝体周围大分离流动以及后台阶流动中产生的湍流结构,因此大量研究开始使用DES 方法对舰面流场进行数值模拟,来研究舰船表面流场中的涡结构。
2007 年,Forrest 等[22,66]验证了Polsky[53]之前推荐的DES 方法在舰船-直升机动力学界面模拟中的有效性。他们将DES 计算结果与试验获得的速度等值线、瞬时速度矢量图和湍流数据等进行对比,发现两者吻合良好。这表明DES 方法能够有效捕获舰船表面流场中,尤其是在壁面附近的,大规模湍流结构。之后他们采用DES 方法开展了大量的相关研究。2010 年,Forrest 和Owen[22]使用DES 方法,对不同风向角下SFS2 和T23 护卫舰的舰面流场进行了数值模拟,通过与风洞试验结果的对比,认为DES 方法有能力模拟大分离流动并且捕捉到大规模的湍流结构,同时发现SFS2 和T23 舰面流场中主要的流动结构比较相似(见图22 和图23)。2012 年,Forrest 等[67]又采用DES 方法,对两艘舰船在不同风向角与不同风速下的非定常流场开展了数值计算研究。通过计算收集了大量的非定常流场数据后,用于飞行模拟仿真。他们认为采用DES 方法获得的非定常数据高度还原了真实流场,可以用于高保真度的飞行仿真模拟。

图22 SFS2 时均流场与瞬时流场速度分布[22]Fig.22 Velocity distributions of the time averaged and instantaneous flowfields for SFS2[22]
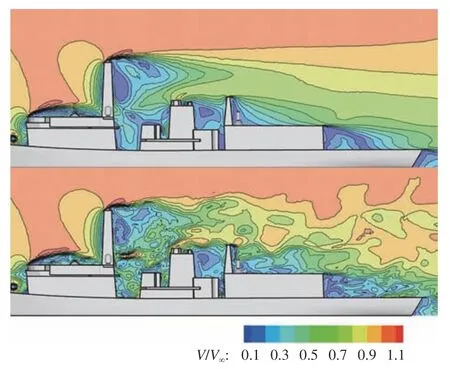
图23 T23 时均流场与瞬时流场速度分布[22]Fig.23 Velocity distributions of the time averaged and instantaneous flowfields for T23[22]
此后,大量的类似研究[56,68-70]均表明DES 方法计算结果远远优于RANS(见图24),可以准确捕捉舰面非定常大分离流场特性,且基本可以真实还原舰面的主要涡系结构,因此采用DES 方法获得的流场可为舰载直升机起降安全性评估提供更可靠的输入。

图24 计算结果对比(根据文献[56]重绘)Fig.24 Comparison of the computational results(adapted from reference [56])
Van Muijden 等[71]在2013 年开展了X-LES(extralarge eddy simulation)与定常RANS 方法在舰面空气流场计算中的比较。X-LES 方法在边界层内使用湍流模型,而其他区域则使用亚格子尺度模型,通过对比,他们发现X-LES 方法的精度优于定常RANS 方法,前者的流速比偏差在0.1 量级,而后者在0.2 量级。尽管流动模型的物理层次更高,X-LES 方法并不能捕捉到PIV 试验中的所有尺度。而且,与定常RANS 相比,0.1 个数量级的精度增益将导致计算成本急剧增加。因此,他们认为,在初始设计阶段,采用定常RANS 方法来初步分析直升机甲板上的平均船舶尾流流场特性是合理且经济的。但是,选择计算精度更高的非定常方法将更好地捕捉波动流场特性。
2015 年,Zhao 等[72]评估了非定常船舶空气尾流模拟的混合RANS-LES 方法。他们采用基于熵的分离涡模型(S-DES)和稳态RANS Spalart-Allmaras(SA)模型开展了对SFS 模型的绕流流场数值计算。作者对无黏项和黏性项分别采用了五阶WENO 格式和四阶中心差分格式,以减小数值耗散。对于时间离散,则采用双时间步长和子迭代实现二阶精度。通过与Mora[73]的试验数据进行对比,发现相比于SA 湍流模型,S-DES 方法能更好地捕捉SFS 模型的尾流。通过移除SFS 模型中直升机机库前方的烟囱并与SFS 模型流场对比,他们尝试分析了船舶尾流中湍流涡流结构的形成机制(见图25)。从两个流场的对比中,发现气流最初从SFS 前部分离,并产生带有湍流结构的强非定常剪切层,向后方传播至烟囱处。此后这些涡结构与机库边缘的涡流相互作用,并覆盖了直升机甲板上的着陆区域。

图25 瞬时流场对比[72]Fig.25 Comparison of instantaneous flowfields[72]
2019 年Watson 等[74]运用延迟分离涡模拟(DDES)对双舰岛和滑跃舰艏布局的英国伊丽莎白女王级航空母舰(HMS Queen Elizabeth)的流场进行了大量数值计算,并对其1∶200 的缩比模型进行了风洞试验,用声学多普勒测速仪测量了舰船周围的非定常流动数据。结果表明,在斜风状态下,该航母的双舰岛结构会导致飞行甲板上产生更加复杂的气流。而全尺寸CFD 数值解与试验结果吻合很好,是模拟航空母舰等大型结构体全尺度空气流场的有效工具。
以上的研究结果表明,目前DES 等RANS-LES混合方法逐渐开始替代RANS 方法,成为了舰船表面流场数值计算研究的主要手段。舰船本身几何复杂,高质量网格生成难度极大,而混合方法通常对网格的要求低于LES 方法,在较少的网格数下可以获得类似甚至优于LES 的计算结果。另外,网格数量的降低可以使其计算效率提高。因此,采用RANS-LES 混合方法计算,非常适用于舰船设计后期机-舰耦合动态界面的流场数据获得。
3 机-舰耦合流场数值计算研究
目前机-舰耦合流场的研究手段主要包括CFD 数值模拟、风洞试验、建立机-舰耦合的动力学模型和飞行模拟器等[75-80]。本章主要论述采用数值计算开展的耦合流场研究工作。20 世纪90 年代,国外研究者就开始了对直升机-舰船耦合尾流特性的研究。Crozon[81]在他的博士论文中定义两种机-舰耦合模型,即单向耦合与双向耦合。“单向耦合”是指独立于直升机尾流计算船舶空气尾流的模型(见图26);而“双向耦合”是指船舶和直升机尾流相互影响并同时计算的模型(见图27)。目前的机-舰耦合流场研究都属于这两种模型之一。

图26 单向耦合流程图[81]Fig.26 Flowchart of the one-way coupling [81]

图27 双向耦合流程图[81]Fig.27 Flowchart of the two-way coupling[81]
3.1 单向耦合
单向耦合通常把孤立舰船的流场信息提取出来,再将其流场数据添加到旋翼流场的计算当中,虽然忽略了直升机与舰船流场之间的双向耦合作用,但可以更加定量准确地分析叠加舰船流场前后的差异,得到舰船流场对直升机的影响。
1994 年,Erm[82]首次对直升机-舰船耦合干扰进行仿真,他采用澳大利亚皇家海军FFG-7 级护卫舰和西科斯基SH-60B 海鹰直升机(FFG-7/SH-60B)组合开发了一个模拟程序。该程序基于Fortenbaugh[83]模型。为了处理耦合的舰船-直升机尾流,该模型包括七个不同的模块。但是,通过对程序预测的速度和FFG-7 全尺寸试验中测量的速度进行比较,两者之间存在显著差异。他认为造成不匹配的原因可能是由于模拟程序的诸多假设。其中,程序中使用了简化的动量盘模型代替旋翼,但这种模型不能完整地描述湍流尾流中的旋翼气动力。因此,有效地耦合船舶-直升机建模需要较为精确的直升机气动力建模。
1996 年,王存仁等[84]针对某直升机-舰组合模型采用风洞试验获得的流场数据计算旋翼气动力,并进行了风限图计算。1999 年孙传伟等[85]研究了舰面流场对直升机着舰时悬停操纵的影响,他们采用N-S 方程求解了某型军舰舰面流场,在采用试验数据修正计算结果后,再将修正后的舰面流场叠加到某无人直升机旋翼流场计算中,实现了单向的机-舰耦合分析。他们发现,与横向气流相比,垂向气流及其分布对舰载直升机悬停操纵特性存在较大影响。
2015 年徐广等[86]进行了直升机在复杂舰面流场中的悬停研究,针对舰面流场非线性、非均匀的特性,把旋翼桨盘离散成空间有限单元,将当地流场风速叠加到叶素剖面相对气流中,改进了叶素气动力计算模型,提高了旋翼载荷的计算精度。采用CFD 方法计算了某型母舰甲板上方的空气流场,利用得到的流场数据对UH-60A 直升机在该舰甲板4 个直升机起降位进行悬停配平,通过与陆基情况对比,研究了舰面流场对舰载直升机舰面悬停的影响(见图28)。为了验证方法,还计算了直升机在舰面流场中对风场响应的PSD 谱图,并与直升机在MIL 流场模型中的响应进行了对比,发现两者接近。
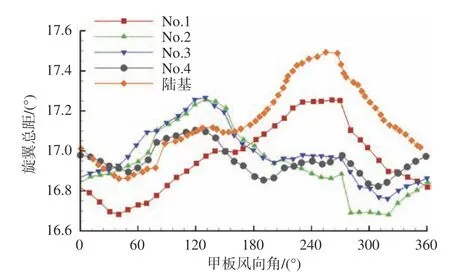
图28 旋翼总矩变化趋势图(根据文献[86]重绘)Fig.28 Total moment variation of the rotor(adapted from reference [86])
2016 年吉洪蕾等[87]采用本征正交分解(POD)方法对舰面流场进行重构,发展了一种耦合POD 重构流场的直升机舰面起降数值模拟方法。首先采用计算流体力学(CFD)方法计算舰面非定常流场,获得离散数据样本;然后提取流场的POD 模态,并截取能够捕捉到原流场主要特征的少量模态对原流场进行重构;再采用叶素理论计算旋翼气动力和力矩;最后建立耦合舰面流场的直升机高阶飞行动力学模型。结果表明:使用POD 方法重构后的舰面流场数据约为原始样本数据的8.5%,且重构流场与原始流场吻合良好;POD 方法能够解决舰面非定常流场数据量过大的问题。
3.2 双向耦合
舰面尾流和直升机尾流这两种流场在着舰域内存在明显的相互干扰,旋翼尾流与舰船尾流的相互作用增加了直升机悬停和起降的难度,且这种耦合流场内部的复杂性会影响到直升机能否安全着舰。双向耦合通过对舰船尾流与旋翼下洗流进行综合分析,其仿真结果可为直升机的舰面操纵提供准确指导。目前双向耦合的数值计算方法中,按照耦合计算中对于旋翼的处理可以分为两类:一种是基于直升机动量叶素等理论的简化模型方法,即根据直升机旋翼的动量叶素理论,在N-S 方程中引入动量源项来模拟旋翼对空气的作用力;另一种则在网格生成中直接加入旋翼几何模型,并采用滑移网格或者重叠网格,与舰船网格相连接,开展耦合流场的旋翼气动力计算。这两种方法,前者计算量较小,且可以采用定常计算快速获得流场结果,但是由于简化了尾流场对旋翼的气动作用,因此仅能获得主要的耦合流场流动特征,无法准确获得耦合流场中的旋翼气动力和桨尖涡的变化特性;后者则通常计算量巨大,但是因为对旋翼进行了更准确的模拟,因此可以获得更加准确的耦合流场特征以及旋翼气动力变化特性。下文将就这两种方法展开论述。
3.2.1 旋翼简化模型方法
1995 年,Landsberg 等[88]使用美国海军研究实验室的并行FAST3D 求解器,研究了直升机下洗与DDG-51 驱逐舰非定常舰船空气尾流上的废气轨迹和浓度的非线性耦合效应。他们采用了动量源方法,即认为直升机处于悬停状态,因此其对空气的作用力等于其重力,再将该力平均分布到整个桨盘平面内作为垂向动量方程源项,从而实现了旋翼下洗流场与舰面尾流的耦合。计算结果表明,下洗对直升机着陆甲板上的垂直和轴向速度有显著影响。功率谱密度图证实大部分湍流能量在0.1~1 Hz 范围内,这与之前的舰船表面流场结果基本一致。
1998 年,Tattersall 等[89]也采用了动量源方法开展了机-舰耦合流场研究。该方法首先计算无舰船尾流影响下的旋翼桨盘平面压力变化;再将压力变化平均后作为源项加入垂向动量方程中计算耦合流场;之后将获得的新流场作为输入,重新计算旋翼桨盘平面压力变化,同时实现旋翼的动态配平,并将配平后的压强变化分布到耦合流场计算中。通过以上的耦合迭代,实现了机-舰耦合流场的双向耦合计算。然而,他们未能验证他们提出的方法,也没有显示计算结果与试验数据之间的任何比较。
2002 年,Wakefield等[90]采用了类似的动量源思想,通过修改N-S 方程,不仅在垂向动量方程中引入源项来代表旋翼的垂直力,还在水平方向动量方程中引入源项来代表旋翼的水平力,从而实现机-舰耦合流场的计算。通过桨叶上的诱导速度,可以计算出配平状态的总距和周期变距,通过对比发现,无论是0°还是90°风向角,在直升机甲板上悬停状态(在尾流中)与配平前飞行状态相比有很大的波动。这两种情况都需要正的纵向周期,表明需要在桨盘前部增加变距角。90°风向角的情况需要较大的正横向周期,以补偿船右舷的上升气流和左舷的下降气流。此外,该研究还表明,船舶尾流引起的平均速度梯度会导致旋翼上的诱导速度发生显著变化。
2006 年,Polsky[91]采用COBALT 解算器开展了舰船-旋翼机(LHA/V-22)的耦合流场计算。她分别使用了一个载荷平均分布的动量盘模型和基于叶素理论的简化旋翼模型来模拟旋翼的气动力。前者通过在方程中添加源项,对整个桨盘范围内的网格施加平均推力;而后者则采用叶素理论计算旋翼叶素气动力后,对叶素所在位置的网格添加相应的推力。她断言未来随着计算机技术的进一步发展,高保真的CFD模拟将被广泛应用于旋翼机与船舶的耦合流场计算中。
2015 年,黄斌等[92-93]开展了适用于舰载直升机着舰域耦合流场分析的CFD 方法研究,提出了“嵌套作用盘”模型,可用于直升机动态着舰时的流场分析。该方法借助于重叠网格的思想与动量源方法,将桨盘平面网格与流场网格相互重叠嵌套(见图29),通过两者的插值实现耦合流场计算。通过该方法对机库门开合对起降的影响进行了分析,认为机库门开度在1/2 以上时,有利于舰载直升机起降。这与赵维义[94]的试验研究结论一致。

图29 “嵌套作用盘”模型示意图[92]Fig.29 Illustration of the overset actuator disk model [92]
2017 年,苏大成等[95]采用动量盘模型,以具有典型驱护舰结构的LPD-17 及ROBIN 直升机的组合为研究对象,分析直升机-舰船耦合情形下的流场特征。研究表明,直升机着舰时,旋翼会与舰船艉部的涡回流区及甲板两侧的舷涡发生较强的“涡-涡干扰”,旋翼拉力产生显著振荡,并呈现出先减小、后增大的变化特征;当着舰位置向舰艉移动时,艉部回流区的影响减弱,旋翼拉力振荡幅度相应减小。同时全机状态下的耦合流场模拟结果表明:机身和尾桨对舰艉流场影响较小,可用旋翼-舰船耦合流场代替直升机-舰船耦合流场,以提高计算效率。
2018 年,杜溢华[96]利用动量盘模型,对直升机-两栖攻击舰耦合流场进行非定常数值计算,研究了不同来流风向下(0°、左舷30°和右舷30°),多架舰载直升机悬停和降落时的耦合流场特性。
2019 年,陈华健等[97]以两栖攻击舰(LHA)和V-22“鱼鹰”倾转旋翼机为研究对象,基于SST 湍流模型对舰载倾转旋翼机着舰耦合流场进行数值模拟研究,分析了V-22 着舰高度对耦合流场的影响,其中旋翼采用了动量源方法。研究发现:舰船流场的低频非稳态特征会导致旋翼桨盘气动载荷发生显著波动,不利于飞行操纵;垂直降落过程中,舰船甲板会形成“前低后高”的压力分布特征,倾转旋翼气动载荷均方根值也会明显增加,降低了着舰安全性,且右旋翼气动载荷均方根值比左旋翼平均大一倍以上,表明右旋翼面临着更加严峻的气动环境。同年,Su 等[98]研究了舰载直升机旋翼的旋转方向对旋翼气动载荷特性的影响。研究表明,在右舷30°风向角下,由于机库尾流的影响,逆时针旋翼的平均拉力比顺时针的大,有利于直升机的操纵。2019 年胡楚君等[99]基于动量源方法建立了舰载直升机着舰风限图计算的新模型,应用所建立的方法,以旋翼操纵量、尾桨操纵量、直升机姿态角和全机需用功率为判断标准,给出了算例直升机的着舰风限图。结果表明,基于CFD 的着舰风限图计算方法可以有效地用于舰载直升机着舰风限图的确定。
2019 年,王超[100]构建了舰船-直升机计算模型,通过动量源方法模拟旋翼,并采用重叠网格方法处理直升机机身,实现降落运动。他采用某型护卫舰为模型,研究了舰船摇摆运动对舰船尾部流场的影响,但其摇摆状态是通过将舰船固定在某个倾斜角度实现的,并未开展动态计算。
采用旋翼简化模型可以大大降低直升机旋翼模拟的计算代价,以上研究均以较小的计算代价实现了直升机-舰船的耦合流场计算。但是,这些研究主要关注于流场的特征演化,对于旋翼的气动影响,虽然可采用叶素理论方法获得,但是其准确性还需要进一步验证。
3.2.2 舰船-旋翼耦合数值计算
对直升机旋翼开展数值计算研究,就必须实现对其高速旋转的模拟,目前开展旋翼计算主要采用旋转参考系方法,滑移网格方法和重叠网格方法。其中旋转参考系方法分为单参考系模型方法与多参考系模型方法(multiphase reference frame,MRF),后者也称为冻结转子方法。这类方法通过设定固连于旋翼上的坐标系转动,既避免了旋翼网格的旋转变形,又因为这类流场通常是旋转对称的,因此在直升机悬停的计算中可以采用定常计算快速获得流场结果。但是这种方法通常要求交界面处不应存在较强的耦合干扰关系。滑移网格则采用圆柱将旋翼包裹起来(见图30b),生成网格后旋翼在圆柱内连同网格一起旋转,交界面则采用插值方法交换通量。重叠网格也叫Chimera 网格或嵌套网格法,是采用具有重叠区域的两套或者多套网格,其中背景网格通常为舰船网格,而部件网格则为旋翼网格,部件网格可以在背景网格区域内任意移动,两者通过包含有重叠区域的交界面进行通量交换。
3.2.2.1 旋转参考系方法
耿雪、孙鹏、张术佳等采用旋转参考系方法对机-舰耦合的舰面流场进行了大量研究[101-104]。2014 年,耿雪[102]利用旋转参考系方法分别对LHD 舰船流场、单旋翼-舰船耦合流场、多旋翼-舰船耦合流场进行了数值模拟,通过多参考坐标系MRF 方法模拟旋翼流场,获得风向角、悬停位置、旋翼数量对复合甲板流场结构、湍动能分布及旋翼受力的影响。研究结果表明:当直升机旋翼悬停在甲板上方时,旋翼桨尖涡与舰船甲板表面的旋涡相互掺混,且旋翼位置越靠近上层建筑,旋翼桨尖涡与上层建筑尾涡掺混程度越大,相互干扰越明显;当多个旋翼同时悬停时,不仅旋翼与上层建筑尾流相互干扰,而且旋翼尾涡之间也存在相互干扰,各涡流区之间掺混加剧,最终影响旋翼的拉力。2015 年孙鹏和耿雪等[103]通过多参考坐标系MRF 方法模拟了旋翼-舰船耦合流场,发现在0°风向角时,旋翼的存在使得其后方甲板区域的涡流范围与气流下洗趋势增加明显;侧风会增大甲板区域涡流范围,加剧了旋翼桨叶不平衡性。同年张术佳等[104]在耿雪的研究基础上,采用Fluent 软件中的MRF 方法开展了多架直升机同时悬停时对舰船甲板流场特性的影响研究,分析了不同风向工况下的流场结构、螺旋度分布以及湍动能。结果表明:各旋翼周围的流场参数相互影响,侧风的加入使得流场结构更加紊乱,湍动能超限区域覆盖了整个甲板流场,这对于直升机的起降是非常不利的。但是,MRF 方法通常适用于旋转对称的直升机悬停流场,且对于机-舰耦合流场这种存在强耦合的流场,采用这种方法开展研究的准确性还需要进一步验证。
3.2.2.2 滑移网格
2014 年,Crozon 等[16]开展了结合直升机飞行力学的机-舰耦合流场计算,研究结果表明,采用CFD 方法可以实现高保真度机舰动态界面仿真。研究分别采用了动量盘模型和旋翼模型计算模型代替直升机(见图30),并且采用了Steijl等[105]采用的配平方法,实现了直升机动态配平。研究发现,以前采用孤立舰船流场值开展的飞行力学分析由于忽略了机-舰耦合干扰的气动效应,其结果与真实的耦合情况存在较大差别。通过对比旋翼模型与动量盘模型的计算结果,发现两者存在一定差别,特别是机库后方的回流区大小(见图31)。因此作者更建议采用旋翼模型,并认为相较于动量盘模型其可以更真实地反应直升机控制量的变化。

图30 网格示意图[16]Fig.30 Schematic diagram of the grid [16]

图31 网格示意图Fig.31 Schematic diagram of the grid
2018 年,Crozon 等[81]进一步开展了高保真度机-舰耦合流场数值计算研究,在计算中他们加入包含配平算法与飞行员模型的飞行力学模块,并采用三个模型分别对耦合解算器进行了验证,其中旋翼旋转采用滑移网格方法实现,直升机的平动则采用重叠网格方法实现(见图32)。通过与Rosenfeld等[106]、Schwarz等[107]和Lee 等[108]的试验数据进行对比,验证了这三个模型的计算结果。他们认为k-ωSAS 湍流模型在网格较粗的区域仍能获得合理的流场非定常特性;通过与DES 方法对比,尽管两者的平均流场特性相似,但SAS 模型在数值上更稳定且成本更低。该项研究工作证明了通过直升机飞行力学代码与计算流体力学工具相结合来实现高保真直升机-高保真船舶耦合流场模拟的可行性。

图32 无量纲垂向速度云图对比[16]Fig.32 Comparison of the dimensionless velocity contours [16]
2021 年,李通等[109]基于简化护卫舰和双桨旋翼的耦合模型,对舰船纵摇状态下的动态机-舰耦合流场进行了数值模拟,分析了耦合流场中的涡结构和垂向速度分布等的发展变化,定量分析了纵摇运动对旋翼拉力的影响,对比了不同甲板状态下的流场差异。研究结果表明,静止状态下的流场数据不能够准确反应运动状态下的流场结构。
从以上研究中可以发现,采用滑移网格方法可以在舰载直升机-舰船耦合流场中准确模拟旋翼气动影响,但是对于进舰以及斜向降落等情况,则需要借助重叠网格或者其他动网格方法实现。
3.2.2.3 重叠网格
2010 年,Lee 和Silva[110]采用重叠网格(见图33)方法研究了旋翼-舰船耦合流场的压力场及速度场特征。他们先采用旋翼悬停算例与试验结果对比,验证了重叠网格方法的可靠性,然后开展了旋翼进舰过程中机库门表面压力分布与变化的研究,证明了采用重叠网格实现直升机-舰船耦合流场模拟的可行性。

图33 重叠网格示意图[110]Fig.33 Schematic diagram of the overset grid[110]
2015 年,黄斌[92]采用重叠网格方法,开展了机-舰耦合流场数值计算研究,对比嵌套作用盘方法与重叠网格方法获得的耦合流场发现,尽管两者流场相似,但是后者可以获得更多的流场精细结构(见图34)。此外,还通过建立舰载直升机配平计算模型,开展了直升机着舰风限图的计算,分析了有无上层建筑物以及风向角的变化对舰船尾流场的影响,研究发现,直升机着舰过程中,旋翼拉力先减小后增大,机身阻力先减小而后变为负值。

图34 涡量等值面对比[92]Fig.34 Comparison of the vorticity iso-surfaces [92]
2018 年,宗昆等[111]分别使用作用盘方法和运动嵌套网格方法模拟机-舰耦合流场,采用k-ε湍流模型,对LPD-17 船型和“海豚”直升机进行起降区旋翼-舰船耦合流场计算研究。研究结果表明:上层建筑物后方的下洗流动,造成旋翼的实际迎角减小,旋翼拉力减小。运动嵌套网格方法可以捕捉到旋翼流场的细节,但是需要耗费巨大的计算量。虽然作用盘方法对旋翼流场细节的捕捉不够充分,但是获得的主要流场结构与运动嵌套网格方法基本一致(见图35)。

图35 水平面垂向速度对比[111]Fig.35 Comparison of vertical velocities in the horizontal plane[111]
从以上的研究中可以发现,重叠网格方法能够实现机-舰耦合流场中旋翼气动力的精确计算,并能获得更准确的耦合流场。另外,其本身的重叠特性更便于开展直升机进舰和起降等运动过程的数值模拟。因此,尽管相比于动量源方法等简化模型,重叠网格方法的计算量巨大,但是随着计算机技术的发展,其必然会更广泛地应用于多机进舰与起降、摇摆舰面起降等复杂机-舰耦合流场的数值模拟中。
4 结论
舰面空气流场研究是一项巨大且复杂的系统工程,其对舰载直升机舰面安全起降具有至关重要的意义,也是舰载直升机-舰船动态界面研究的重要组成部分。该研究内容主要分为两部分:一是孤立舰船的舰面流场特性,二是机-舰耦合干扰流场特性。通过对国内外典型的舰面流场数值计算研究进行总结,可以得到如下结论:
1)数值计算方法与风洞试验及海上实测相比,具有限制少、成本低、效率高的特点,获得的流场信息也更丰富。目前,CFD 技术是机-舰耦合流场研究的主要手段。但由于数值计算方法本身的一些限制,其准确性需要以风洞试验或实船测试结果来进行验证。另外,数值计算结果可以用于飞行模拟试验,但是目前的数值计算还无法完全替代海上的试飞试验。
2)采用LES 方法对舰船表面空气流场开展研究,可以获得远较RANS 方法更准确的流场精细结构,但是LES 本身对网格的要求极高,因此大大限制了其在工程问题中的应用。
3)目前DES 等RANS-LES 混合方法逐渐开始替代RANS 方法,成为了舰船表面非定常流场数值计算研究的主要手段。RANS-LES 混合方法计算非常适用于舰船设计后期的机-舰耦合动态界面流场数据获取。
4)单向耦合方法虽然忽略了直升机与舰船流场之间双向耦合的作用,但采用真实旋翼模型,并开展数值模拟,可更加定量准确地分析叠加舰船流场前后的差异,得出舰船流场对直升机的影响。双向耦合通过对舰船尾流与旋翼下洗流进行综合分析,其仿真结果可为直升机的舰面操纵提供准确的指导。
5)旋翼简化模型计算量较小,且可以采用定常计算快速获得流场结果,但是由于简化了尾流场对旋翼的气动作用,因此仅能获得主要的耦合流场流动特征,无法准确地获得耦合流场下旋翼气动特性。
6)采用滑移网格方法,可以在舰载直升机-舰船耦合流场中准确模拟旋翼气动影响,但是对于存在进舰以及斜向降落等情况时,则需要借助重叠网格或者其他动网格方法实现。重叠网格方法不仅可以实现机-舰耦合流场中旋翼的精确计算,而且其本身的重叠特性更便于开展直升机进舰等的数值模拟。
