基于TLS的红松树冠半径提取及其外轮廓模型构建
2023-03-30贾炜玮唐依人李丹丹
王 帆,贾炜玮,2*,唐依人,李丹丹
(1.东北林业大学林学院,黑龙江 哈尔滨 150040;2.东北林业大学森林生态系统可持续经营教育部重点实验室,黑龙江 哈尔滨 150040)
树木地上部分分为树干和树冠,其中树冠是树木进行呼吸作用、光合作用、蒸腾作用等生理活动的主要场所,影响着树木的生长和生存[1]。树冠的大小能反映出对象木和相邻木间的空间竞争状态,与林木生长、枯损、树木的总叶量之间有密切关系。研究树冠的大小可以为树木生长的定量分析及预测提供必要的条件[2-4]。树冠外部轮廓形状是单株树木总体印象的最直观反映,是研究树冠的空间特征(如树冠体积和表面积)的基础,同时也是模拟林分动态的重要依据[5]。因此准确对树冠外部轮廓进行模拟有利于分析树木生长、林木竞争和树冠的结构。
目前,树冠外部轮廓的模拟主要采用直接法和间接法两种方法。直接法是利用回归方程直接进行树冠轮廓的模拟[6-10]。间接法主要是通过回归分析来建立预测枝条基径、枝长、弦长和着枝角等枝条属性因子的模型,然后根据弦长和着枝角度之间的三角函数关系间接计算出树冠半径,并以此来定量地描述树冠的外部轮廓[11-13]。而对于上述树冠外部轮廓模拟所需的树冠因子的获取,大多是将树木伐倒进行枝干解析测量。因此在传统的林业调查中,获取树冠结构信息的方法费时费力,虽然所获数据的精度很高,但是测量方法复杂,且会造成资源的浪费。
激光雷达是一种主动遥感技术,通过发射激光脉冲和接受回波信号来精准测定地面物体的位置[14-17],激光脉冲还可以透过森林冠层获取详细的冠层结构和林地信息。因此激光雷达广泛应用于森林参数的提取。例如利用地基激光雷达(TLS)数据可以直接进行树高、胸径、冠高、冠幅、立木材积、冠层覆盖率、地上生物量、蓄积量[18-24]等的估算。但是利用激光雷达点云数据进行树冠外轮廓模型的模拟研究鲜见报道。全迎等[25]利用无人机激光雷达点云数据进行了长白落叶松树冠外部轮廓的模拟,结果显示二次抛物线模型的拟合效果最好。Ferrarese等[26]利用地基激光雷达点云数据研究了花旗松(Pseudotsugamenziesii)、西黄松(Pinusponderosa)、冷杉(Abiessp.)的树冠外部轮廓,并利用修正后的Beta和Weibull函数建立了预测3种针叶树种的冠形方程。
上述研究没有将点云数据所建立的模型与实测真值模型进行对比分析,无法为利用点云数据代替实测数据进行单木属性研究提供强有力的证明。鉴于此,本研究利用人工林红松点云数据提取不同树冠深度处的最大树冠半径,并与解析木实测枝条因子对比来分析提取精度,在精度满足林业研究的前提下利用所提取的半径进行树冠外轮廓模型的构建,以期为利用TLS点云数据进行树冠结构的研究提供进一步的参考。
1 材料与方法
1.1 研究区概况
研究区位于黑龙江省佳木斯市孟家岗林场(130°32′~130°52′E,46°20′~46°30′N),地处完达山西麓余脉,地貌主要为低山丘陵;坡度平缓,坡度为10°~20°,平均海拔250 m。孟家岗林场属于东亚大陆性季风气候,春季干旱少雨,秋季易霜冻,夏季短暂且温暖湿润,冬季持久且寒冷干燥。最高气温达35.6 ℃,最低气温为-34.7 ℃,年平均气温在2.7 ℃。无霜期大约120 d,年平均降水量550~670 mm。土壤类型主要为典型暗棕壤,还有少量草甸暗棕壤、潜育暗棕壤、原始暗棕壤;除此,还存在草甸土、白浆土、泥炭土以及沼泽土。该林场以人工林为主,占整个施业区面积的2/3,天然次生林约占1/3,森林覆盖率为81.7%。
1.2 数据采集
2020年9月,在孟家岗林场设定的红松人工林固定样地中选择了6块样地进行每木检尺,样地面积均为600 m2;根据样地中每木检尺的结果,采用等断面积径级标准木法在每块样地周围分别选出一级木、二级木、三级木、四级木、五级木,共计30株,样木信息统计见表1。用地基激光雷达对所选样木进行扫描,随后将样木伐倒进行枝干解析工作。
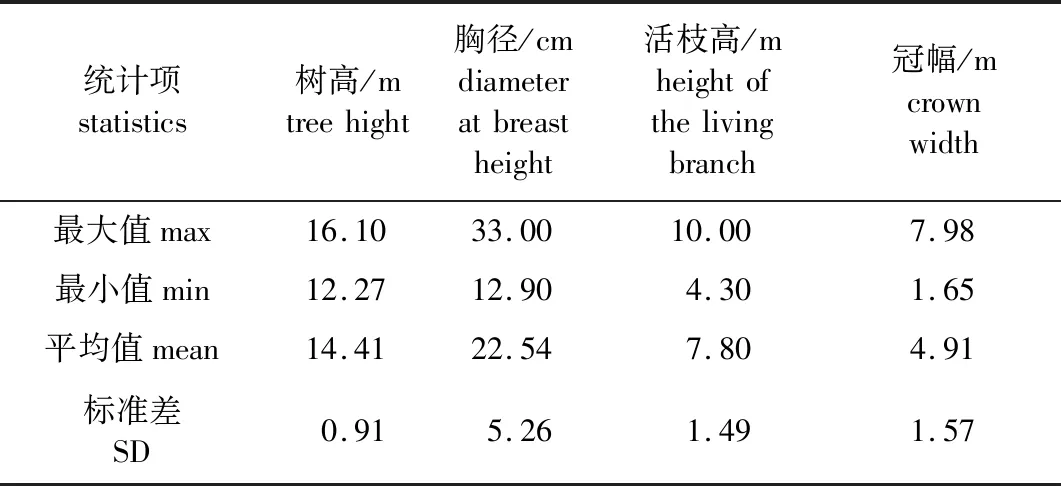
表1 红松样木信息统计Table 1 Summary statistics of Pinus koraiensis trees measured in the field(n=30)
研究使用Trimble TX8地基激光雷达扫描仪对样木进行扫描,具体设备参数见表2。为了保证单木信息的完整性,对样木进行了3个站点的扫描,站点尽量呈120°夹角布设在样木周围,站点距样木的距离约等于样木的树高;每株样木周围均匀布设5个靶球用于后续的配准工作,扫描开始前清理掉样木周围的低矮灌木,各站点扫描时间均为10 min。具体的扫描示意图见图1。扫描结束后将样木伐倒进行枝干解析工作,伐倒的样木从根茎0 m处开始沿树干按照1 m的距离进行区分,不足1 m处当作梢头,活枝高(HB)距梢头的距离即为冠长(LC)。将每个区分段垂直放置于地面测量每个区分段内所有轮枝的着枝深度(dDINC)、枝长(LB)、弦长(CB)和着枝角度(AV)。树冠半径(RC)计算公式为RC=CB·sinAV。相对树冠深度(dRDINC)的定义为:以树梢为起点,某一树冠深度与树冠长度的比值[5]。具体计算公式为dRDINC=(dDINC-CB·cosAV)/LC。红松树木及枝条因子示意图见图2。所有样木在每轮选出1个最大枝条(树冠半径最大),共计616个,作为检验点云数据提取精度的样本以及对树冠外部轮廓模型进行构建。

表2 Trimble TX8设备参数Table 2 The device parameters of Trimble TX8
1.3 点云数据预处理
利用Trimble RealWorks 11.2软件对多站扫描的原始数据进行配准。以靶球为目标,采用单点配准方法进行配准。由于森林环境复杂,所以相对于结构简单、特征显著的扫描目标如孤立木、建筑物等有较大的拼接误差,配准过程中精化后误差为6 mm。本研究的目标为单株样木,因此以目标树为中心,将目标树的相邻木包括在内进行裁剪,以此来减少数据容量,加快软件的处理速度。在LiDAR360软件中对裁剪完成的数据进行去噪与归一化处理,采用地基林业模块中的点云分割功能分割出目标树与相邻木,分割结果中包含单木的位置坐标、树高、胸径、冠幅等信息,再利用单木属性测量工具进行活枝高的测量。采用公式(1)计算树高、胸径和活枝高的提取精度。
(1)
式中:P为提取精度,n为正确分割的单木数量,Xi为分割出的单木因子,xi为与分割出的单木对应的实测单木因子。
1.4 不同树冠深度处最大树冠半径的提取
树冠外轮廓曲线是以树冠的任意高度处半径为因变量,以该位置距树梢的距离为自变量的函数,是用来模拟树冠形状变化规律的曲线方程[27]。因此树冠外轮廓曲线的模拟需要获取树冠不同深度处的半径。根据提取的活枝高度将树冠点云裁剪出来,并将裁剪好的树冠点云数据转化为.txt格式,在Matlab R 2020b软件平台上采用点云分层投影法进行不同树冠深度处最大树冠半径提取(如图2A、2B)。最后以30株解析木不同树冠深度处的实测最大树冠半径为真值,采用公式(1)计算利用地基激光雷达点云数据提取出的最大树冠半径的精度。
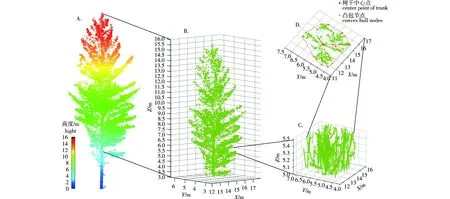
A.单株红松点云;B.在Matlab平台中显示的树冠点云;C.单层树冠点云;D.单层树冠点云的平面投影。A.the point cloud of Pinus koraiensis individual ;B.the point cloud of the crown displayed on the Matlab platform;C.the point cloud of single-layer crown;D.the planar projection of point cloud of single-layer crown.图2 基于点云数据提取最大树冠半径的流程Fig.2 The process of extracting the maximum crown radius based on point cloud data
1)将树冠点云沿Z轴按照一定间距进行分层,参照高慧淋等[28]对人工红松林的研究,选取0.5 m为分层间距。具体的分层步骤如下:
①遍历树冠点云中所有点的Z值,取出Z值最大的点Zmax和Z值最小的点Zmin。
②设置点云在Z轴方向的分层间距h(所用间距为0.5 m),计算划分的点云层数k,k的计算公式如式(2)所示:
(2)
式中,fRoundup表示向上取整。
③以Z=Zmin为起点进行点云的分层,遍历所有树冠点云,点云高程值介于Z和Z+h之间的点划分至第一层,储存于点集A1中,完成第一层的划分后,下一层高程值设为Z=Zmin+h。
④重复步骤③直至完成所有分层的划分,将各层点集Ai储存于点集A中。
2)获取不同分层内的最大树冠半径,此部分的关键是如何精确找出各层点云的最外部轮廓点,凸包算法是一种寻找散乱点集最外层点的常用算法,因此将分层后的点云进行平面投影,利用二维凸包算法寻找投影后点云的最外部轮廓点,最外部轮廓点到树干中心点(点云分割后的单木位置坐标即为树干中心点的坐标)的距离即为树冠半径(如图2C、2D)。获取最大树冠半径的具体步骤如下:
①将上述通过划分得到的单层树冠点云的点集Ai在XY平面内进行投影;
②利用二维凸包算法寻找平面点云的最外层轮廓点,并将得到的最外层轮廓点置于点集Ti中;
③分别计算点集Ti中所有点Pm到树干中心点O的距离d,d的计算公式如式(3)所示,选择d的最大值作为该层最大树冠半径。d值最大的点所在高度即为该层最大树冠半径所在的高度。
(3)
式中:x、y表示树干中心点坐标;xm、ym表示点云外层轮廓点Pm的坐标。
④重复步骤①—③,直至各层点云全部选取完毕。
1.5 树冠外轮廓模型建立
利用地基激光雷达点云数据提取红松不同树冠深度处最大树冠半径,采用30株红松解析木的实测数据与点云数据分别建立树冠外部轮廓曲线模型,对比两种数据的模型拟合效果,分析评价利用点云数据建立树冠外部轮廓模型的精准性与可行性。通过收集整理国内外相关文献中常用于描述树冠外部轮廓曲线的模型,本研究最终选取了3个基础模型,分别为单分子式[29]、二次抛物线[30]、3参数Weibull方程[26],各模型形式分别如下:
RC=a+b·(1-e-c·dRDINC);
(4)
RC=a+b·dRDINC+c·dRDING2;
(5)
(6)
式中:RC为任意树冠高度处的树冠半径;dRDINC为相对树冠深度;a、b、c为模型参数。
对所有实测解析木数据与地基激光雷达扫描数据进行随机抽样,抽出75%的样本用作建模数据,剩余25%样本用来对模型进行独立检验。本研究采用决定系数(R2)、均方根误差(RMSE)来评价模型的拟合优度。模型的R2越大,RMSE越小,模型的拟合效果越好。利用独立样本检验来评价模型的预测能力,检验指标采用平均绝对偏差(MAE)、平均相对偏差绝对值(RMAE)、预估精度(Fp)进行评价。Fp越大,MAE、RMAE越小,模型的预测效果会越好[31-32]。根据模型的拟合优度与检验结果,选出最优的红松树冠外轮廓模型。
1.6 树冠外轮廓模型的再参数化
为了预测不同大小红松的树冠外轮廓形状,对选出的最优红松树冠外轮廓模型进行了再参数化处理。对30株解析木分别估计最优树冠外轮廓模型的参数,分析树冠外轮廓模型中所有参数与树木因子(如胸径、高径比、活枝高)之间的相关关系;最后将与参数相关性最高的因子引入模型中。
2 结果与分析
2.1 不同树冠深度处最大树冠半径的提取精度
由公式(1)计算可知,单木树高和胸径的提取精度分别为98.30%和98.49%;单木活枝高的提取精度为92.60%,因此按照提取的活枝高裁剪出来的树冠点云可以完整还原真实的树冠形状。利用点云分层投影法共提取树冠半径428个。具体的实测数据与TLS提取数据的概况见表3。
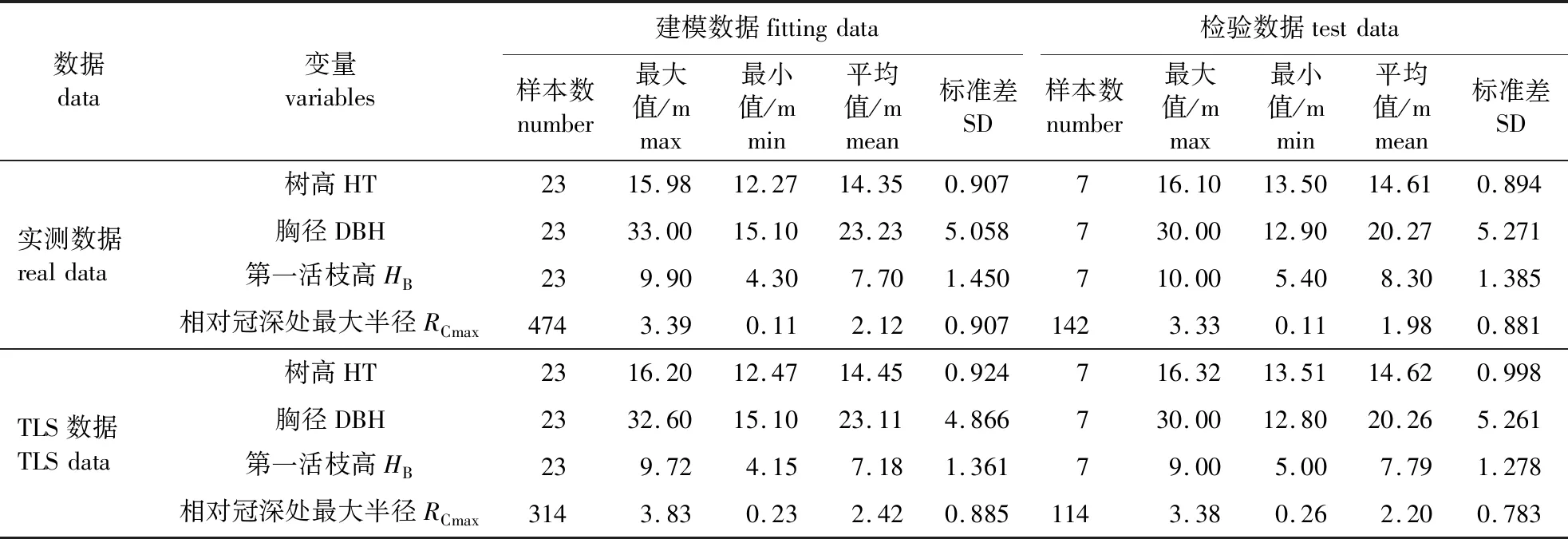
表3 红松实测数据与TLS数据统计Table 3 Statistical of field measured data and TLS data of Pinus koraiensis
为了减小树高对提取精度的影响,在相对树冠深度范围下进行最大树冠半径提取精度的分析。将相对树冠深度范围以0.05进行划分,然后以30株解析木中根据各轮最大枝条计算出的半径值为真值,对比分析每个相对树冠深度范围内最大实测树冠半径和利用点云数据提取出的最大树冠半径。若解析木实测数据中两轮相邻轮枝的最大枝条距离太近,会导致这两个枝条计算出的最大半径值落入同一相对冠深范围内,此时只对比两者中最大的半径;若两轮相邻轮枝的最大枝条距离太远,会导致某些相对冠深范围没有实测半径值。最终共对比了337组半径数据,具体结果见表4。
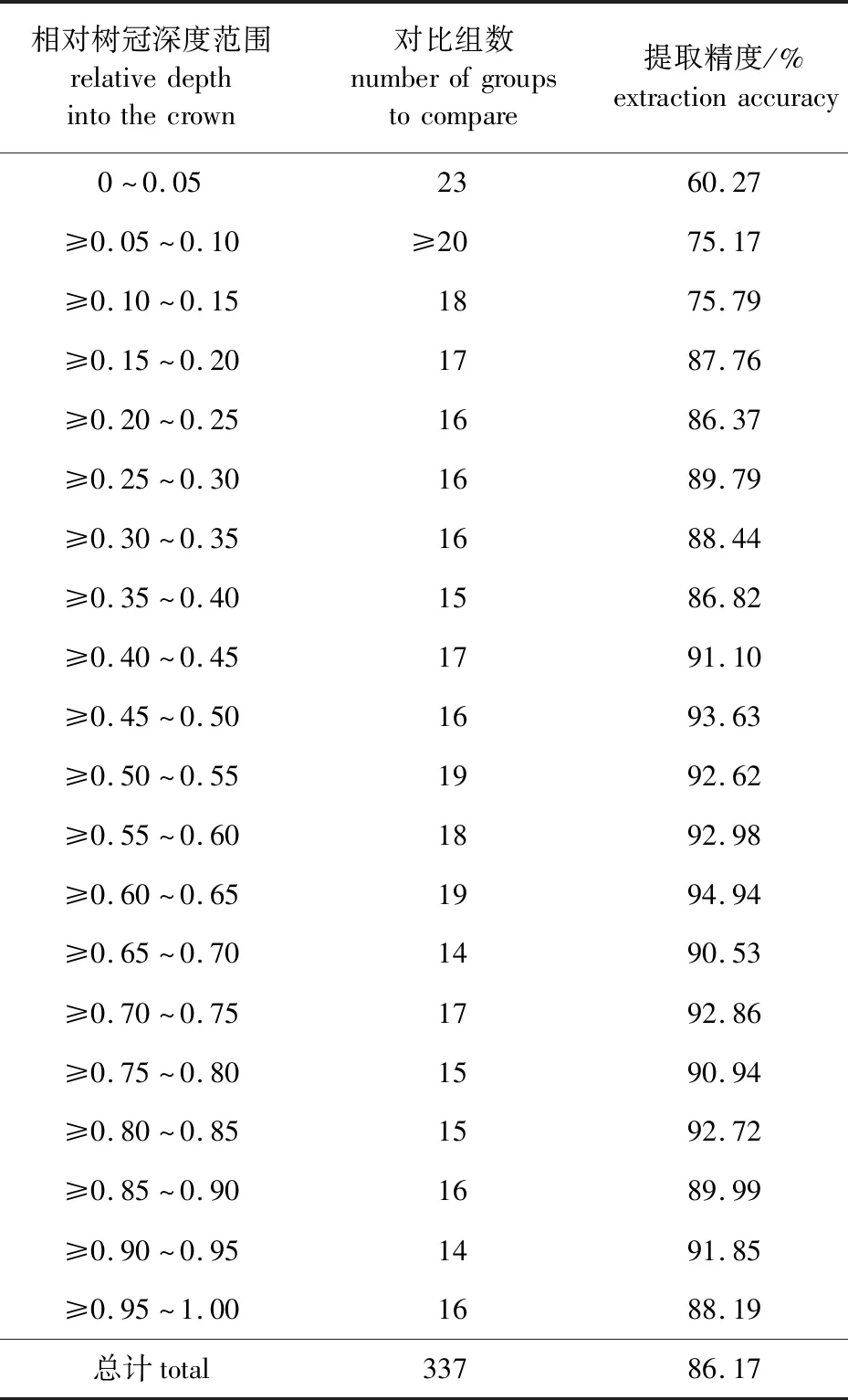
表4 树冠半径提取精度分析Table 4 Accuracy analysis of tree crown radius extraction
根据表4可以看出,树冠半径的总体提取精度为86.17%。不同相对树冠深度范围的半径提取精度存在差异,提取效果最好的相对树冠深度范围为0.15~1.00,该范围内半径的提取精度都稳定在90%左右;提取效果最差的范围为0~0.15,该范围内的提取精度都低于80%,而0~0.05范围内的提取精度仅为60%左右。分析认为这可能主要是由于仪器本身的局限性导致的,地基激光雷达是一种自下而上的扫描仪器,因此会造成上部点云的密度较小,再加上树冠上部互相遮挡以及风的影响产生许多噪点,导致树冠上部提取出的树冠半径的质量较差。
2.2 树冠外轮廓模型的拟合与检验
树冠外轮廓模型的拟合与检验结果见表5。从总体上可以看出参数估计结果相差不大,参数估计值的标准误差都很小,表明3个模型的稳定性很好,决定系数(R2)都高于0.68。从模型方面来看,两种数据类型下3参数Weibull函数的R2均为最高,RMSE均为最低;单分子式的R2均为最低,RMSE均为最高;因此拟合效果均为3参数Weibull函数>二次抛物线>单分子式,其中3参数Weibull函数与二次抛物线的拟合优度差异很小,但3参数Weibull函数满足梢头处树冠半径为0的特征,单分子式的拟合优度最差并且无明显拐点,(图3)。
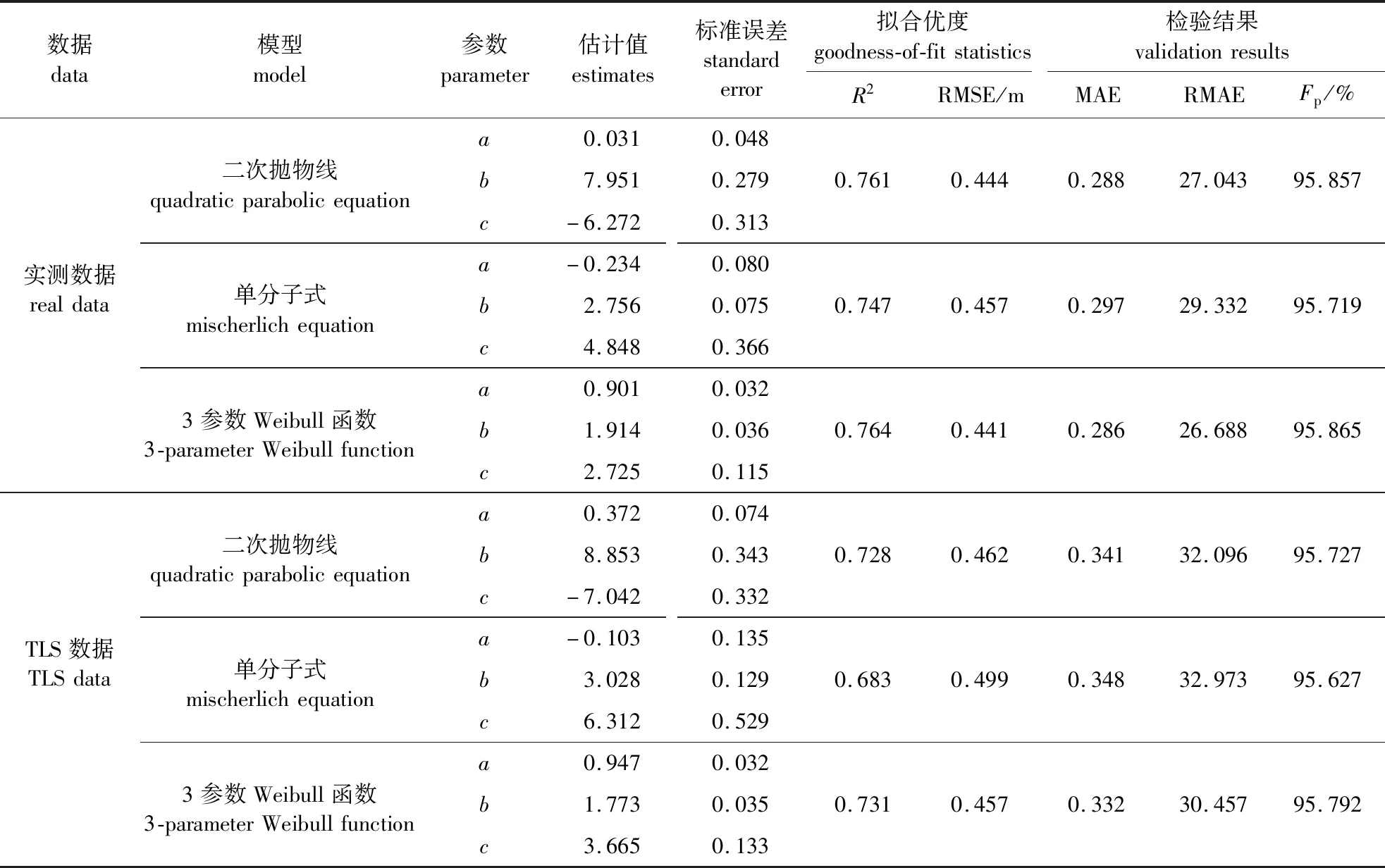
表5 红松树冠外轮廓模型的拟合优度及检验结果Table 5 Goodness-of-fit statistics and validation results by three crown profile models for Pinus koraiensis
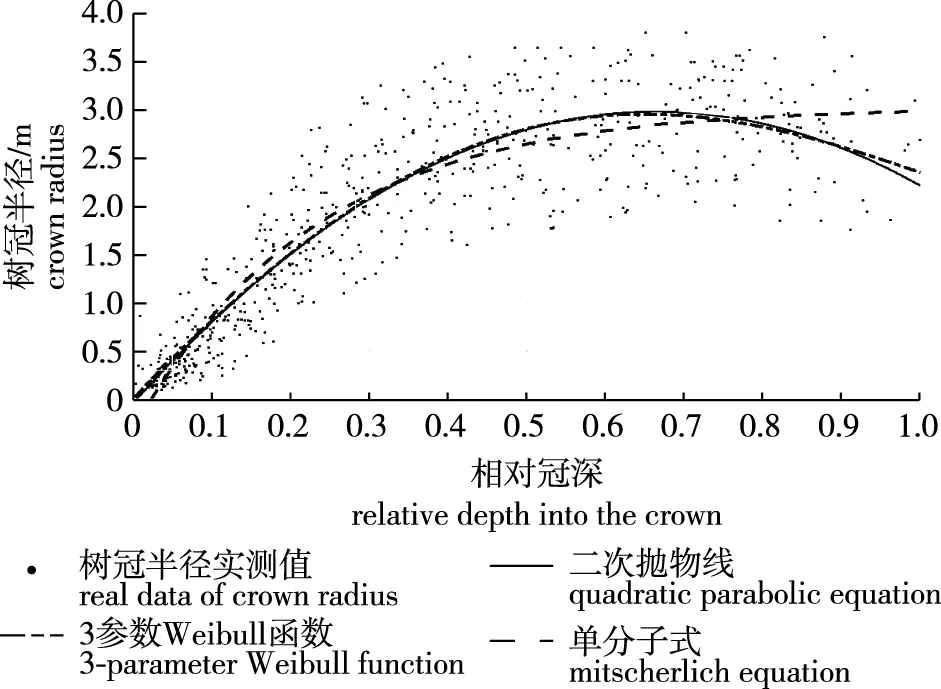
图3 不同方程拟合实测红松树冠轮廓Fig.3 The model curves for three crown profile models
从检验结果来看,不同数据类型下的预估精度(Fp)都高于95.2%,表明模型的预测效果良好。TLS数据下的模型检验结果与实测解析木模型的检验结果相差较小。3参数Weibull函数的Fp最大,MAE、RMAE最小,因此3参数Weibull函数为红松树冠外轮廓最优模型,与根据拟合优度评价模型得出的结论一致。
2.3 树冠外轮廓最优模型的再参数化
通过分析每株样木最优树冠外轮廓模型所有参数与林木因子(胸径、高径比、活枝高)之间的相关关系,对最优模型进行了再参数化,具体结果见表6。
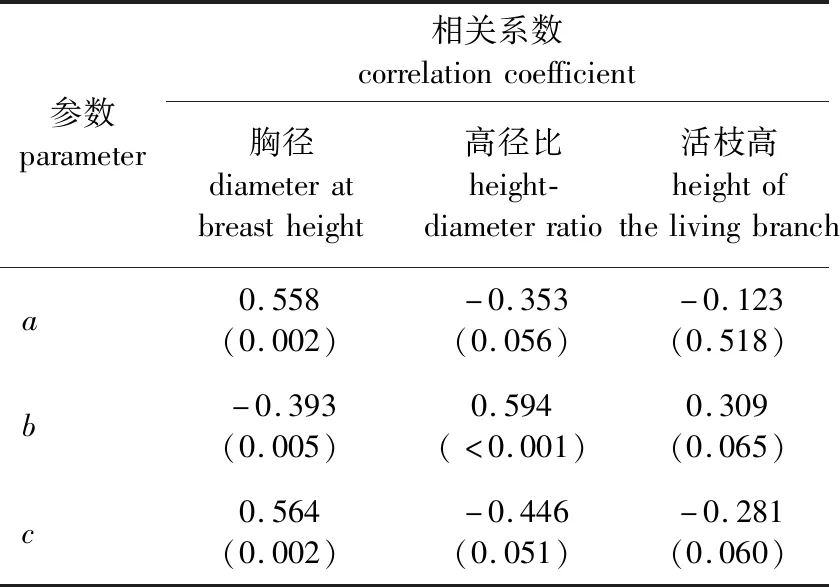
表6 各林木因子与参数的相关性检验Table 6 Correlation test of trees factors and parameters
根据表6可知,参数a和c与胸径的相关系数最高,分别为0.558和0.564,且P值均小于0.05;参数b与高径比的相关系数最高,为0.594,P值小于0.001。因此本研究采用胸径和高径比对模型参数进行再参数化。再参数化后的模型形式见式(7),参数的估计结果以及模型的拟合优度和检验结果见表7。
(7)
式中:RC为任意树冠高度处的树冠半径;dRDINC为相对树冠深度;DBH为单木胸径;ρHD为高径比;a1、a2、b1、b2、c1、c2为模型参数。
根据表7的参数估计结果可知,各参数的标准误差都较小,证明再参数化后的模型有较好的稳定性。从拟合效果来看,模型再参数化后,实测数据模型的R2从0.764升高到0.809,RMSE从0.441 m下降到0.393 m;TLS数据模型的R2从0.731上升到0.788,RMSE从0.457 m下降到0.400 m。从独立检验结果来看,再参数化后模型的MAE、RMAE均有所下降;实测数据模型的预估精度从95.87%上升到97.16%,TLS数据模型的预估精度从95.79%上升到97.04%,因此可以利用3参数Weibull函数预估红松树冠外部轮廓的形状。
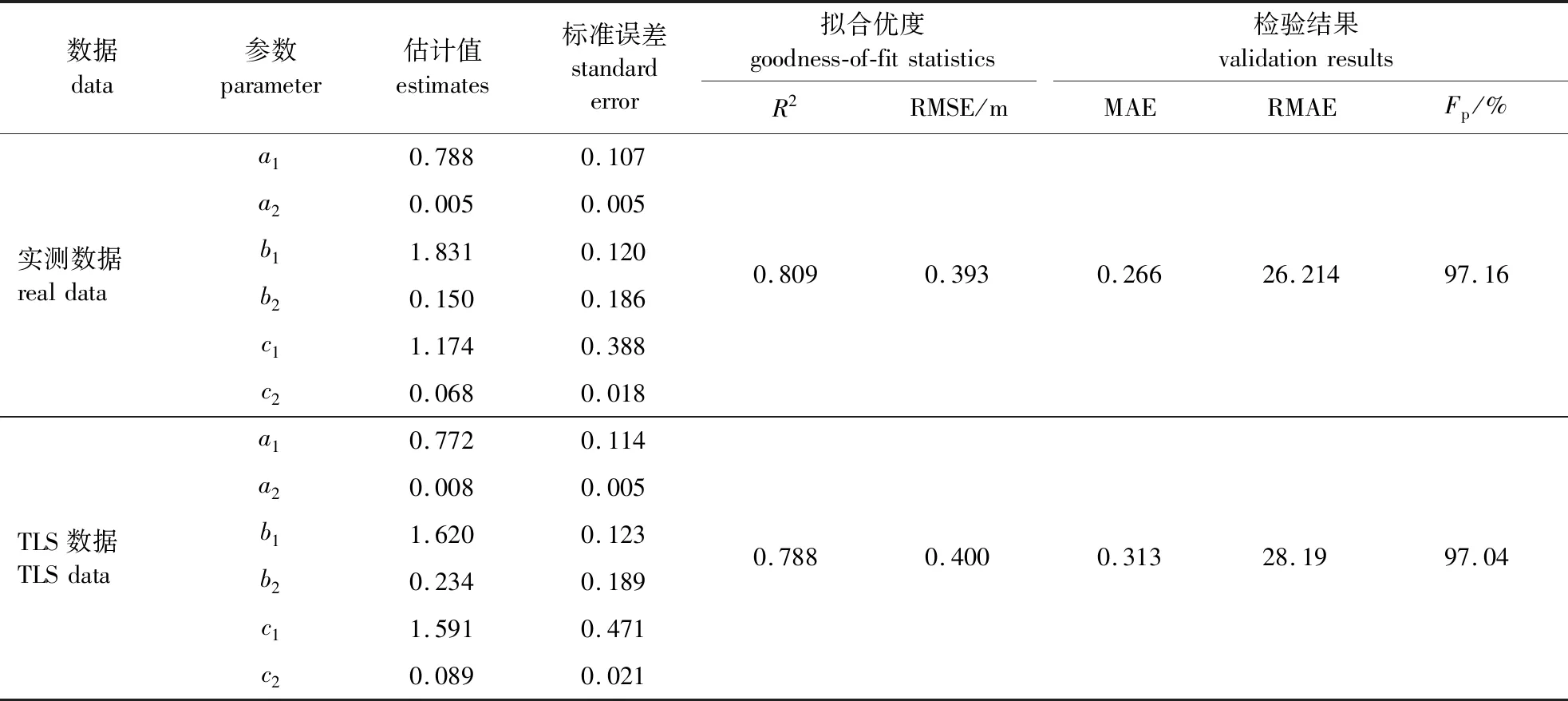
表7 3参数Weibull函数再参数化结果Table 7 The results of 3-parameter Weibull function after re-parameterization
为了更加直观地描述树冠外轮廓模型的效果,使用30株解析木的平均胸径和平均树高作为模拟树木的胸径(22.54 cm)和树高(14.41 m),分别利用实测数据树冠轮廓模型与TLS数据树冠轮廓模型绘制该模拟树木的树冠外轮廓变化趋势,并分析两者的差异,见图4。从图4中可以看出,实测数据的树冠轮廓曲线与TLS数据的树冠轮廓曲线差异不大。在相对冠深0~0.5时,点云数据的估计值略高于实测值;在相对冠深0.5~1.0时,两者拟合曲线几乎重合。总体来看利用TLS数据可以近似代替实测数据进行树冠轮廓模型的研究。
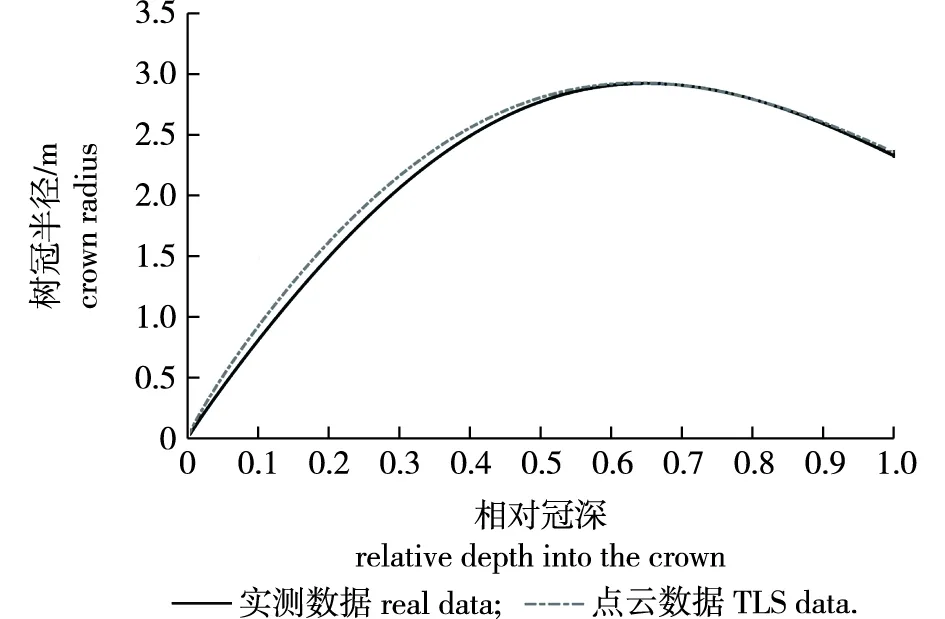
图4 基于两种数据类型的树冠外轮廓曲线模型Fig.4 Crown profile model curves based on two data types
3 讨 论
本研究选取的30株解析木的胸径、树高和活枝高提取精度分别为98.49%、98.30%和92.60%,这与郑玉洁[20]研究地基激光雷达对落叶松单木因子的提取所得出的结论一致。本研究采用目视解译的方法测量单木的活枝高,由于激光点云不能很好地区分活枝和死枝,导致识别精度不是很高。Seielstad等[33]和Béland等[34]研究发现激光强度可以用来区分针叶树和阔叶树中的叶片和枝条,因此在未来的研究中,可以考虑利用激光强度信息来自动识别活枝高。基于TLS点云数据的单木因子的高精度提取为利用点云数据进行单木属性研究提供了切实可行的依据。
不同树冠深度处的最大树冠半径的提取效果整体较好,但是树冠顶部与树冠下部的提取精度还是存在较大差异,树冠下部的提取精度优于树冠顶部。在相对冠深0~0.15范围内,提取精度逐渐提高,从相对冠深0.15开始提取精度逐渐趋于稳定并且维持在90%左右。Li等[35]基于地基激光雷达数据提取了长白落叶松不同相对高度处的树干直径,发现在相对高度0.8至梢头部分的提取精度明显降低,这与本研究所得出的结论一致。从总体上看,基于地基激光雷达点云数据提取的不同树冠深度处的最大树冠半径的精度满足对树冠属性研究的标准。
利用点云数据所提取的不同高度处的最大树冠半径进行了树冠外轮廓模型的拟合,所选取的3个模型均能较好地拟合点云数据提取的树冠外部轮廓。其中3参数Weibull函数为红松树冠外轮廓最优模型,这与高慧淋等[28]对黑龙江省红松人工林树冠外部轮廓模拟选出的最优模型一致。高慧淋等[30]采用分段回归技术建立的红松冠型预估模型引入的变量为胸径,本研究经过对最优模型的再参数化,最终引入模型的变量为胸径和高径比,模型的拟合效果和预测精度均有明显提升。
以30株解析木的平均胸径和平均树高作为模拟木的胸径(22.54 cm)和树高(14.41 m),分别利用再参数化后的实测数据树冠轮廓模型与点云数据树冠轮廓模型去绘制模拟木的树冠外轮廓变化趋势,通过观察两条轮廓曲线可以直观地看出曲线的差异主要体现在树冠中上部,说明点云数据所提取的树冠因子在树冠中上部误差较大。这可能是由于解析木与周围相邻木的树冠互相遮挡再加上树冠顶端受风影响大造成扫描点云产生较多的噪点。地基激光雷达采用的是一种自下而上的扫描方式,因此靠近树冠中上部位置所扫描出的点云质量会较差,所以仪器本身的局限性也是误差的主要来源。全迎等[25]利用无人机激光雷达提取了长白落叶松树冠特征因子并模拟了树冠轮廓,取得了很好的效果,但是对于冠基高的提取效果略差,这主要是由无人机激光雷达自上而下的扫描特点造成的。为了减小这些误差,在未来的研究中可以考虑将地基激光雷达与无人机激光雷达相结合来提高树冠因子的提取精度。
传统树冠外轮廓模型的研究,往往需要将研究样木伐倒进行枝解析,利用伐倒木的枝解析数据进行树冠外轮廓的模拟[11-13]。这种方法的测量精度很高,但是会消耗大量的人力物力,测量效率低。这种破坏性的采样方式不仅会造成资源的极大浪费,而且无法对样木进行长期连续地研究。由于数据的获取难度大,树冠轮廓模型的研究往往只能局限于样木尺度上,而对于样地尺度却无法进行更深层次的研究。利用地基激光雷达可以进行非破坏性的采样,数据获取效率大大提高,同时可以长期连续地在样地和样木尺度上进行数据的获取,是一种环境友好型的数据获取方式。本研究探索了基于地基激光雷达数据的树冠外轮廓模型构建的可行性,研究结果显示利用地基激光雷达点云数据可以真实还原单木三维结构,从点云数据中提取单木因子的精度满足对单木属性研究的标准。同时本研究利用点云数据进行了红松树冠外轮廓模型的拟合,拟合效果良好,进一步验证了利用地基激光雷达数据进行树冠外轮廓研究的可靠性,为在大尺度下进行树冠外轮廓模型的研究奠定了实践基础。