举高消防车支腿自动调平方法研究
2023-03-27王茂伟李群王健
王茂伟 李群 王健


摘要:高度大于30m的举高消防车下车部分均要求自动调平,如何在各种复杂不平的路而条件下均能实现快速有效的调平,是当前举高消防车普遍存在的难点。本文首先对现有举高消防车的常用调平方式、应用范围以及优缺点进行了分析。在此基础上,提供了一种应用于H型支腿的新型调平方法。这种方法能够提高车辆对复杂地而的适应性,并改善相关结构件的受力状况。
关键词:支腿调平;白动调平;调平方法;举高消防车
中图分类号:U463 DOI:10.20042/j.cnki.1009-4903.2023.06.003
0 引言
举高消防车通常分为上车与下车两部分。上车包括回转平台、臂架、工作斗或消防喷射装备等部分,而下车则由底盘、支腿(或可伸缩)及副车架等部件组成。在正常作业时,上车部分的回转平台底平面必须处于水平或近似水平状态。根据GB 7956.12-2015《消防车第12部分:举高消防车》的规定,举高车必须具备支腿调平或回转平台调平的能力,且调节范围不应小于5。。此外,调平精度误差不得超过±1。这意味着举高消防车在各种复杂不平的路面条件下,需要具备快速有效的调平能力。除了对调平机构(如支腿、转台)的调节行程有较高要求外,调平方法同样至关重要。
1 下车部分常用的调平方式
1.1 手动调平
根据GB 7956.12-2015《消防车第12部分举高消防车》的规定,对于带工作斗或最大工作高度不小于30m的举高喷射消防车,应采用自动调平技术。因此,这种调平方式主要应用于高度在30m以下的举高喷射消防车,属于较为基础的配置。在实际操作中,操作者通常根据水平仪的读数来判断整车的倾斜度,并通过操作液压手柄来调整下车部分的位置,使其达到水平状态。这种调平方式需要耗费较长的时间,并且效率相对较低。因此,本文对于这种调平方式不再赘述。
1.2 自动调平
自动调平具体可分为转台调平和支腿调平2种。
1.2.1 转台调平
转台调平主要适用于下车部分采用X型或蛙型支腿的消防车。由于这种支腿在地面撑实后,若再进行下伸,地面与支腿间的摩擦力会加大,对支腿的受力产生不利影响,调平操作变得困难。因此,选择对转台进行调平。转台调平可以分为双缸式调平和斜盘式调平2种方式。
双缸式调平基本结构如图1所示。在转台上安装有用于检测转台左右角度的单轴倾角传感器。具体调平方法为在支腿撑实地面后,将臂架抬起,然后进行调平操作。调平油缸会根据传感器反馈的角度信号,对转台两侧高度进行调节,直至角度满足要求,调平过程结束。
双缸式调平方式的优点是调平范围大,调平机构较简单。不过,这种调平方式也存在些缺点首先,调平油缸只能对转台两侧进行调平,如果应用于带有工作斗的消防车上,工作斗必须具备自动调平功能,以弥补转台纵向的倾斜角,其次,转台调平油缸需随着转台回转角度的变化不断进行调平,因此回转速度不可过快,否则会出现调平滞后现象。
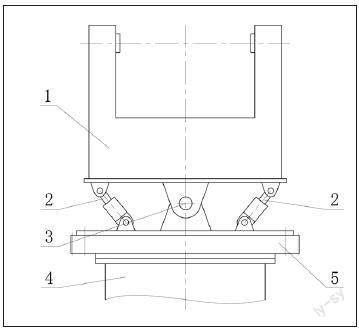
斜盘式调平机构的核心部件是专用的斜盘式回转支承,也称倾转支承。这种回转支承的结构如图2所示,其中序1下底座与副车架连接,序2为调节斜盘,序3上底座与转台连接。其工作原理是通过斜盘的内部旋转实现转台平面的角度调平。
斜盘式调平方式的优点是具有较大的调平范围(最大可达100),能够快速地进行调平,并且一旦调平完成,无需再次调整。不过,由于斜盘式调平机构的内部结构和驱动机构相对复杂,其成本也较高,并且市场上可供选择的规格较少。因此,目前斜盘式调平方式主要应用于进口的云梯消防车。
1.2.2 支腿调平
支腿调平主要用于下车部分采用H型支腿的消防车(特别是带4个支腿的车辆),这是绝大多数举高消防车的标准配置。如图3所示,下车部分安装有双倾角传感器,用于检测车体的倾斜状态。调平方法为根据传感器反馈的信号来判定车体的倾斜状态,然后通过调节4个支腿A、B、C、D的高度,使下车部分达到水平状态。这种调平方式是目前应用最为普遍的,本文主要讨论此种调平方式。
2 现有支腿调平的缺陷
目前,采用H型支腿进行下车调平的消防车普遍采用单个双倾角传感器。传感器的安装位置可能在转台的前方或后方。以图3为例,由于4个垂直支腿的伸缩速度不可能完全致,并且路面可能崎岖不平,这会导致4个支腿不会同时落地。如果继续伸缩,副车架会产生扭曲变形。这意味着在调平开始时,副车架已经发生了扭曲变形。特别是当副车架的扭转刚度较差,或者路面越不平整时,这种情况会更加严重。在这种情况下,θi(支腿A、B连线与水平面的夹角)与θ2(支腿C、D连线与水平面的夹角)的角度相差较大,甚至方向相反。然而,当前的倾角传感器无法准确反映这种状态,也就是说,出现了对初始状态的誤判。在这种情况下进行调平,将会产生2种错误状态
状态一:越调越不平的现象,程序进入调平死循环。
状态二:即便程序认为已调平,这可能只是假象。实际上,不仅没有调平,而且在上车臂架未工作前,副车架就已经产生了额外的扭转变形。如果臂架开始作业,可能会进一步加剧副车架的受力,对副车架的强度产生不利影响。
当然,在车辆所处地面比较平整或副车架扭转刚度足够强的情况下,以上缺陷出现的概率比较小。但这也意味着降低了车辆对地面的适应性或提高了对副车架的刚度要求。
3 一种新型支腿调平方法
为解决以上支腿调平的缺陷,现提供了种新型支腿调平方法。
3.1 主要配置
以图3为例,在副车架的前支腿A、B连线中点和后支腿C、D连线中点上,分别安装了一个双倾角传感器(图中a、b)。这2个传感器分别用来检测角度θ1、θ2和θ3。如图4所示,θ1和θ2的含义与前文描述相同,而θ3则是副车架纵向中心线与水平面的夹角,其值为2个双倾角传感器所检测出的纵向倾斜角的平均值。此外,每个垂直支腿都安装了一个行程开关,用于检测支腿是否与地面压实,同时也可作为检测软腿的装置。每个桥上也安装了一个行程开关,用于检测轮胎是否离地。
3.2 应用范围
带4个H型支腿的举高消防车。
3.3 调平方法
分步骤说明和流程图两部分进行描述。
3.3.1步骤说明
结合图3和图4的定义,调平过程包括如下步骤
步骤1:将车辆的车桥按照行驶方向分为前桥和后桥。前桥上的轮胎为前轮,后桥上的轮胎为后轮。
步骤2:调平支腿A、B、C、D开始伸出。同时,通过软腿检测开关分别判断各支腿是否压实在支撑面上。如果任一支腿压实,则该支腿停止伸出。然后继续判断其余支腿是否也压实。只有当所有支腿均压实后,才停止伸出,并进入步骤3。
步骤3:所有支腿继续伸出,当前轮胎离地后,A、B支腿停止伸出,否则继续,当后轮胎离地后,C、D支腿停止伸出,否则继续。
步骤4:在所有支腿停止伸出后,继续判断所有轮胎是否都已离地。若是,则进入步骤5,否则重返步骤3。
步骤5:分别判断θi和θ2是否在调平预设值(假设±0.5。)以内。如果全部在预设值以内,则直接进入步骤6;如果θ1不在预设值以内,需要调节前支腿连线的较低端支腿,使其慢慢伸出,直至θi处于预设值以内;如果θ2不在预设值以内,需要调节后支腿连线的较低端支腿,使其慢慢伸出,直至θ2处于预设值以内为止。当2个角度都处于预设值以内后,进入步骤步骤6。
步骤6:判断θ3是否在调平预设值(假设±0.5。)以内。当在预设值以内时,则调平过程结束。如果θ3不在预设值以内,则需要调节较低一端的支腿(前支腿或后支腿),进行慢速伸出。在调节过程中,需要实时判断伸出端的的支腿连线与水平面的夹角(θ1或θ2)是否也在预设值以内。如果在预设值以内,则可以继续伸长支腿,直至将θ3调整到预设值内,调平结束。如果θ1或θ2不在预设值以内,则返回步骤5重新开始。
3.3.2 流程图
调平过程流程图如图5所示。
3.4 效果分析
由于采用了分別检测与控制轮胎离地的方法,使得轮胎离地后与地面的距离保持在一个相对较低的水平。这种方法最大程度地保留了调平油缸的行程余量,从而最大限度地发挥了支腿的调平能力,提高了车辆在复杂地形上的适应能力。
由于在前支腿和后支腿的中心位置均安装了双倾角传感器,对前支腿和后支腿的倾斜角θ1和θ2进行了分别检测与调平。对于θ3,采用了取平均值的判断方法,使得调平后的车架不仅没有横向扭曲变形,改善了副车架的受力状况,还避免了纵向弯曲变形对于调平的影响,提高了调平的准确性。
4 结语
通过以上过程可知,只要支腿有必需的伸展行程,该调平方法在完成调平后,A、B腿连线,C、D腿连线以及副车架在车辆纵向上的倾斜度均可满足调平角度的要求。这增强了车辆在复杂地形上的适应性。同时,调平后的副车架几乎不会发生扭曲变形,从而最大程度地改善了副车架的受力状况。
参考文献
[1]国家质量监督检验检疫总局,国家标准化管理委员会.消防车 第12部分:举高消防车:GB 7956.12-2015[S].北京:中国标准出版社,2015.
(责任编辑:王作函)
