多品种柔性智能化重载EMS生产线系统设计及应用
2023-03-27罗新文胡全心
罗新文 胡全心 祝 宇
东风咨询有限公司 武汉 430056
0 引言
多品种柔性智能化重载网元管理(Element Management System,EMS)生产线系统基于某汽车公司高端商务车总装车间生产线项目,依据高端商务车产品结构及生产工艺特点,首次在同类产品底装线采用自主研发的多品种柔性智能化重载EMS生产线系统,以满足多品种、大吨位重载车型生产的前提下,大幅提升各配套设备装配效率,充分体现智能、节能、柔性化生产理念。
根据中高端商务车车型品种过多、整车质量过重、承载结构复杂、底部构件繁多等问题。在设计时充分考虑将内饰到底装再到最终线各方面采用 L形3段式布置。其中高端商务车采用承载式车身装配方式,该系统布置共15个工位,工位间距10.5 m。再从产品工艺及智能化装配角度出发,结合前悬、后桥、电池包等零部件进行差异性分析及系统化设计,研发出重载型多品车身吊具、重载双胞胎式接车机构、吊具定位支撑调节锁紧装置、接车机构专用抱胎夹持器等配套关键设备,从而组建的重载EMS生产系统,实现了柔性化、多品种车型共线生产。
1 产品参数
客车类产品种类可分为3类:
1) 6m18座型,其物理参数6 810 mm×219 5 mm×2 790 mm,整车质量为4 873 kg;
2) 7m20座型,其物理参数7 490 mm×2 195 mm×2 790 mm,整车质量为5 426 kg;
3) 8m24座型,其物理参数8 310 mm×2 195 mm×2 790 mm,整车质量为5 571 kg。
商务车类产品种类可分为5类:
1) 5m12座型,其物理参数为5 590 mm×2 195 mm×2 940 mm,整车质量为4 414 kg;
2) 6m13座型,其物理参数为6 580 mm×2 195 mm×2 940 mm,整车质量为4 615 kg;
3) 7m16座型:其物理参数为7 400 mm×2 195 mm×2 940 mm,整车质量为4 835 kg;
4) 8m19座型:其物理参数为8 080 mm×2 195 mm×2 940 mm,整车质量为5 635 kg;
5) 9m22座型:其物理参数为8 900 mm×2 195 mm×2 940 mm,整车质量为5 805 kg。
2 设计思路
2.1 产品特点
1)纯电动商务车系列有6种车身长度,轮边电动机和中央电动机、左舵和右舵统筹布置、同步设计,共形成30多个基本品种。再加上不同的悬架形式、内饰配置等,变形品种可达120多种。
2)纯电动商务车产品尺寸覆盖6~9 m平台,车型众多,底盘结构多元化(轮边电动机/中央电动机、板簧桥/空气悬挂),与传统乘用车相比,无论是车身长度,车型结构、整车质量等均存在很大差异,造成关键转接设备在输送承载、机械机构、支撑受力等方面存在很大区别。
3)纯电动商务车产品最大整备质量6.8 t,比传统乘用车整车质量高3~4倍。更使得生产的稳定性、承载的安全性、转运的通过性、柔性化共线生产面临巨大的挑战。
2.2 设计难点分析
1)车身在装配过程中,质量不断加重,在完成底盘装配后,已趋于整车质量状态。
2)全新多元化的车身底盘结构及布置,零部件较多,底部结构环境异常复杂。
3)车身受到零部件质量的影响,对整车重心开始产生初始的偏移,且不同车型的底盘结构,重心偏移情况各不相同。
4)重载车型产品体积大、自身重、产品尺寸覆盖广,轴距差异大。
5)受重载车型结构及吊具结构影响,底部空间非常狭小,对设计及制造要求非常高。
2.3 设计构想
以柔性智能化为目标,在保证产品品质前提下最大限度地利用国内自主开发的技术和设备,形成几点构思进行研发设计:1)重载吊具根据车型整车质量、底盘构件、承载结构进行差异化分析及系统化设计,以满足产品多样化需求。2)车身上线及下线按全自动、柔性对接考虑,实现车身上线及下线多品种、柔性智能化自动转接。3)底部装配重点对电池、前后悬架采用AVG输送、自动跟踪、对位进行随线装配。4)工序优化,对重载车身特殊工位的装配难点进行分析,从内饰到底装,底装到最终线体布局、与车身吊具关键工位的转接、合装进行优化,以提高车身上件及整车下线装配、运输效率。5)采用生产制造执行系统(Manufacturing Execution Systems,MES),考虑从MES系统获取车型信息并及时进行信号追踪,从而提高重载型车型的自动化及信息化转接水平,实现总装车间柔性化多品种共线生产,全面提高车间生产效率。
3 工艺设备线体规划
1)考虑到设备利用率、生产系统配置及物流方案等问题,对重载EMS生产线进行分期规划,设备主线体及缓存区可根据产能延伸,同时预留后续二期扩展能力,以适应产品长远期规划需求。
2)根据总装车间平面布局,在车身底装上线处设有自动调销及升降转接工位,可同步实现吊具的自动调腿与车身从橇体到吊具的转接;在车身底装下线处设有四柱升降机及抱胎接车机构,可实现车身从高位吊具到地面的转接;主线体系统设有空吊具缓存段及吊具维修区,充分考虑生产富余量及日常检修,从而有效提高生产线效率及智能化。
3)线体按全承载式车身装配方式进行布局,各分装线分布在线体两侧,便于物料及时取件上线。前悬、后桥、动力电池、轮胎等采用先分装,后上线的模块化装配方式,通过AGV自动上线捕捉,与重载吊具实现同步随行合装,以降低重载EMS系统主线的装配工时。
4)设备定制化、系统配套开发。
5)经对车型数模进行受力和承载分析,综合考虑稳定性、可靠性及输送驱动力等诸多因素,研发设计出一套多品种柔性智能化重载EMS生产线系统。效果如图1、图2所示。

图1 多品种柔性智能化重载EMS生产线系统仿真模型

图2 产品高位到低位转接仿真模型
4 关键技术点
4.1 重载多品种车身吊具
1)考虑整车质量因素 在型材选型上经过严格计算后,求得在规格为180 mm×180 mm×8 mm矩形管时,是能实现吊具最大承载及节省材料最为理想的选型。再运用有限元分析软件对吊具支撑点进行受力分析。发现吊具支腿拐角处,是整个吊具的最大受力屈服点,对此采用支撑件对其进行了加固,以保证最大承载,最大承载量为12 t。
2)受车身尺寸规格影响 为了保证吊具吊装时的稳定性,重载吊具设计前后支腿采用了龙门式结构;平衡框架采用矩形围栏式结构;4个支撑点采用前销后托式结构;通过上平衡框架与前后支腿框架的铰接,从而搭建的矩形框架结构将整车囊括其中,这种龙门框架式不仅可以保证吊具支撑点的稳定,还能有效保护车体表面不受到伤害。
3)车身自重及吊具自重合计达15 t,为了确保车身及吊具的有效输送,重载吊具选用双驱八车型,对驱动电动机进行功率计算选型后,才能提供充足的驱动力;同时驱动采用的滚轮为包胶轮材质,使轨道在承受巨大载荷后,不仅车身运行稳定,还能减少噪声。
4)通过受力承载分析,对设备自身薄弱点进行优化,设计能适用于将6~9 m多品种车型从低位内装线橇体转接到高位吊具的内置升降台滚床和对多品种车型实现各零部件高精度集装的重载型多品种吊具。该2项技术已获得了实用新型专利,产品低位到高位转接仿真模型如图3所示。重载多品种车身吊具受力分析如图4~图7所示。
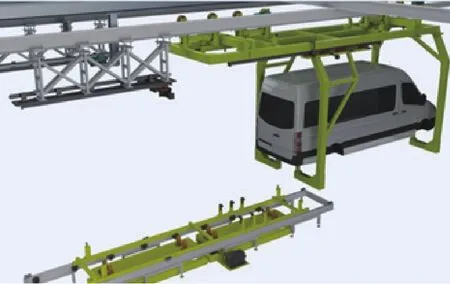
图3 产品低位到高位转接仿真模型

图4 吊具应力分析图

图5 吊具位移分析图

图6 吊具生命分析图

图7 吊具损坏分析
由图4应力分析可知,当吊具4个支腿承受12 t载荷时,产生最大应力为89.1 MPa;在吊腿拐角处低于矩形管的屈服应力275 MPa,所选型材满足要求。
由图5可知,支腿1X向位移为-0.284 mm,Y方向位移为-5.78 mm,Z方向位移为11 mm;支腿2X向位移为-0.284 mm,Y方向位移为-5.78 mm,Z方向位移为-10.9 mm;支腿3X向位移为0.279 mm,Y方向位移为-5.78 mm,Z方向位移为11 mm;支腿4X向位移为0.279 mm,Y方向位移为-5.78 mm,Z方向位移为-10.9 mm。
由图6可知,重载吊具各处的疲劳寿命图解显示最小为389 900,在吊腿上端拐角处将发生疲劳失效,吊具预想寿命为17.4a。
图7损坏图解表明消耗重载吊具寿命损坏百分比,图解显示在吊腿拐角处最大为30.78%。
4.2 重载双抱胎式自动接车装置
受吊具内部空间结构及支撑位置的影响,重载接车机构需附带行走、升降、锁紧、开屏、可调等多种功能才能完成不同品种重载车型的转接。首先通过仿真软件对低位接车机构及重载吊具设备线路位置进行仿真及合理的布局,再用3D软件完成接车机构的参数化建模,对接车机构设备模型和车型数据进行干涉分析,发现采用液压剪刀叉及长矩形升降台堆叠式结构,以压缩接车机构整体宽度,才可以保证接车机构在吊具开档中穿梭不会产生干涉。
由于车身底部结构及吊具空间的因素,需设计出专用于重载车型的抱胎夹持器,才能实现整车与吊具的脱离和转运。在专用抱胎夹持器材质上首选45号钢铸造成型,采用拱形结构原理,在保证抱胎受力的同时,还能保证车身及机车机构能在重载吊具有效空间内自由的穿梭。
考虑到低位接车时,车型品种较多,需将专用抱胎夹持器进行不同位置的切换才能满足多品种车型转接。设计时将专用抱胎夹持器与直线滑轨、水平气缸等设备进行揉合,通过同步带电动机精准的调节前后抱胎夹持器的间距,从而最终使得接车机构满足了不同品种重载车型空中到低位的转接。
通过对车身底部结构、吊具空间尺寸、吊具干涉点位模拟分析,研发出能对最大12 t多品种整车轮胎自动对位捕捉,实现车身从高位到低位的重载双抱胎式自动接车装置及接车装置专用抱胎夹持器。该2项技术已获得实用新型专利,发明专利。接车抱胎机构仿真模型如图8所示,双抱胎式自动接车装置受力分析如图9 ~图12所示。

图8 接车抱胎机构仿真模型

图9 接车装置应力分析图

图10 接车装置位移分析

图11 接车装置生命分析

图12 接车装置损坏分析
由图9应力图解可知,当接车装置前后夹持抱胎臂承受12 t载荷时,最大应力为79.2 MPa,出现在抱胎臂拐角处,低于屈服应力275 MPa,所选型材满足要求。
由图10可知,前抱臂1X向位移为-1.4 mm,Y方向位移为1.75 mm,Z方向位移为0;后抱臂2X向位移为1.4 mm,Y方向位移为1.75 mm,Z方向位移为0;前抱臂33X向位移为-1.4 mm,Y方向位移为1.75 mm,Z方向位移为0;后抱臂44X向位移为1.4 mm,Y方向位移为1.75 mm,Z方向位移为0;
由图11可知,接车装置各处的疲劳寿命图解显示最小为491 100,在抱胎臂拐角处将发生疲劳失效,接车机构预想寿命为21.9 a。
图12损坏图解表明消耗接车装置寿命损坏百分比,图解显示在抱胎臂拐角处最大为20.36%
4.3 自动同步捕捉装配
前悬、后悬、电池包、轮胎等零部件均在线体两侧进行分装后再上线合装,考虑到装配效率,通过对装配仿真计算分析后,将前后悬及电池包产品采用AGV上线,感知车身吊具位置,自动追随到吊具底部,与吊具同步随行,完成零部件与车身的精准扣合;轮胎、压缩机等部件则采用助力机械手进行线边抓取后,与车身吊具同步随行定位后自动扣合。
车身吊具在前悬、后桥、电池包合装时,车身底部线束、推力杆等零件已装配成型,使得车身底部空间十分有限。为避让车身及吊具距离平面的高度,上线AGV在满足前后悬自重承载时,采用浮动可调托盘,使得AGV在吊具底部能进行微调整,保证自动扣合的精度;轮胎安装工位采用轮胎侧翻机构,节省设备占用空间,便于机械手取件。
通过对内置升降台滚床、重载型多品种吊具、定位支撑调节锁紧机构、抱胎自动接车装置及线边分装配套研发设备的深度集成。应用前后悬、电池合装AGV的自动跟踪和扣合;轮胎拧紧、助力装置精准定位的重载型车身转运输送系统。该项技术已获得发明和实用新型专利。自动同步对位如图13所示。

图13 自动同步对位
4.4 吊具定位支撑调节锁紧机构
1)根据工艺布局需求,吊具定位支撑调节锁紧机构需采用空中吊挂形式,对称布置在吊具两侧;
2)考虑吊具支腿自重的影响,吊具定位支撑调节锁紧机构通过采用齿轮电动机及齿条相互啮合,再将齿轮电动机与直线滑轨结构相配合,从而驱动吊具支腿移动,可将吊具支腿进行不同位置的调整。
3)根据产品差异化,吊具定位支撑调节锁紧机构通过MES系统及拍照识别技术,最大能实现6~9 m车型全范围的吊具支腿自动精确调节。
4)通过对多品种车身吊具结构进行优化分析后,为提高车身吊具转接效率及吊具安全稳定性。
5)研发出能对多品种吊具进行支腿调整、实现支腿精准定位、安全锁紧的吊具定位支撑调节锁紧机构。
5 智能信息化技术
通过工业以太网技术,根据MES系统的调度及管理,获取车型信息,控制重载EMS系统的车组、吊具支腿调节机构、锁紧机构、自动接车装置等关键设备根据不同车型自动调整适应,并完成多品种车身与前后悬AGV、电池合装AGV、助力机械手等设备的自动跟踪及扣合、最终线的自动转接,糅合了轮胎拧紧设备、助力装置的定位精准。提高了重载EMS生产线系统的柔性化、自动化、信息化、智能化水平。
5.1 系统上位层网络架构
MES系统是整个系统的核心,按结构化星形拓扑结构,通过光纤环网将重载EMS系统、AGV系统、最终线、轮胎拧紧系统等设备连接起来,为整个工厂生产制造管理提供一个制造协同管理平台。支撑生产调度数字化、制造过程透明化、质量控制精细化、设备运维数字化、车间管理集成化、数据分析实时化的目标,并与ERP等系统集成实现设计制造一体化、生产过程透明化、质量控制电子化。MES系统网络架构如图14所示。

图14 MES系统网络架构
5.2 系统信息传递架构
如图15所示,MES系统指令下达到PLC,PLC下达到各交换机(触摸屏可显示),交换机下传到各应用点及远程站。在信号上传或采集现场数据时,指令信息可上传到MES系统识别或存储。

图15 系统信息传递架构
5.3 多品种车型自动转EMS转接电控原理
如图16所示,MES将车型信息传递给PLC,PLC进行吊具输送系统状态判断从而控制输送系统设备运行,解析和校对车型信息,将车型信息传递给读写头。

图16 多品种车型自动转EMS转接电控原理
PLC下达指令到远程站,远程站经过视觉传感器对MES下达的车型信息进行校正对比,识别确认车型信息、传感器检查吊具位置及调腿气缸的状态、编码器提高调腿机构的精度、调腿机构根据PLC下达指令调整吊具后支腿位置并进行锁紧,同时读写头将车型信息通过读写头写入吊具载码体,检查吊具的实际位置。
5.4 从EMS自动转最终线转接电控原理
如图17所示,PLC进行吊具输送系统状态判断从而控制输送系统设备运行,解析和校对车型信息,读取吊具载码体的车型信息。

图17 从EMS自动转最终线转接电控原理
PLC下达指令到远程站,远程站经过传感器检查接车机构的状态及吊具的位置状态、安全光栅及安全门开关保证安全状态、接车机构根据PLC指令调整抱胎姿态,同时读写头读取吊具载码体的车型信息,检查吊具的实际位置。
6 设计创新亮点
1)研发了适用于将6~9 m多品种车型从低位内装线转接到高位吊具的内置升降台滚床。
2)研发出能对多品种车型实现各零部件集装的重载型多品种吊具,使得结构更加稳定,装配精度更高。
3)应用了能对多品种吊具进行支腿调整、实现支腿精准定位、安全锁紧的吊具定位支撑调节锁紧机构。
4)研发出能将多品种车型通过四柱升降机、柔性抱胎自动接车机构等完成对轮胎自动对位捕捉及调节,实现车身从高位到低位终装线的自动化转接装置。满足产品差异化、柔性化需求。
5)研发的接车装置专用抱胎夹持器,适用于最大12 t整车的稳定安全抱胎,强劲夹持推送。
6)研发应用的集内置升降台滚床、重载型多品种吊具、定位支撑调节锁紧机构、抱胎自动接车装置为一体的智能化重载型车身转运输送系统。
7)适用于前后悬、电池合装AGV的自动跟踪和扣合,轮胎拧紧、助力装置的精准定位,智能化装配程度高,技术更加先进。
8)适用于整体式全承载车身结构,避开了轮边电动机及动力电池底部大件占用空间的问题,提高设备利用率,突显先进水平。
7 结语
该系统已成功应用于某汽车工厂总装车间。加大了智能化总装车间的影响力,随着国际市场新能源汽车的需求呈逐级增量,量产的纯电动整车国内订单不断,出口国外计划加速增加。通过多年生产的验证,解决了汽车行业在多品种重载型车型全自动底装输送、转接、生产的问题。同时该系统应用市场宽广,既可用于大吨位载重物流运输车及新能源大型客车、中巴等多品种车身在底装线上的零部件装配作业,亦可延伸到铁路客车车辆工程等。该系统的投入使用促进我国汽车行业制造装备智能化、柔性化的技术升级换代,取得了显著的经济效益和社会效益。
