船舶靠泊过程撞击力测试系统开发
2023-03-25吉顺莉
吉顺莉
(江苏航运职业技术学院,江苏 南通 226010)
0 引 言
大型海上作业平台和码头在设计时需要考虑船舶靠泊过程的作用力载荷,由于现代船舶的大型化发展,船舶靠泊过程的冲击作用力不断增加,一旦码头或海上平台结构在船舶冲击作用力下发生破坏,容易导致船体受损等严重事故。因此,研究船舶靠泊过程的动力学特性,开发针对船舶靠泊过程的撞击力测试系统,提升码头结构的安全性非常重要。
本文建立了船舶靠泊过程的动力学模型,结合动力学特性分析,设计一种船舶靠泊过程的撞击力测试系统,并详细介绍测试系统的原理。
1 船舶靠泊过程的动力学分析
1.1 靠泊过程动力学建模
将船舶的靠泊方式分为平行靠泊和斜向靠泊2 种,具体如下:
1)平行靠泊
理想情况下,船舶平行靠泊受到的冲击力最小,当船舶平行靠泊时,船首、船尾与码头呈平行线,船首、船尾靠近码头的速度相同。但现实情况中,船舶的平行靠泊很难实现,一方面原因是船舶动力装置位于船尾,船首位置的转向控制难度大;另一方面是因为港口码头的靠泊位置空间有限,船舶平行靠泊所占的空间太大。
2)斜向靠泊
斜向靠泊是最常见的船舶靠泊方式,此时船舶的纵轴线与码头水平线之间呈一定的夹角,船舶在动力系统、风浪载荷作用下,船首或船尾斜向上与码头接触。在船舶斜向靠泊时,船体与码头存在唯一接触点,确保斜向靠泊时船舶与码头的可靠性非常重要。
建立船舶斜向靠泊的运动坐标系统如图1 所示。
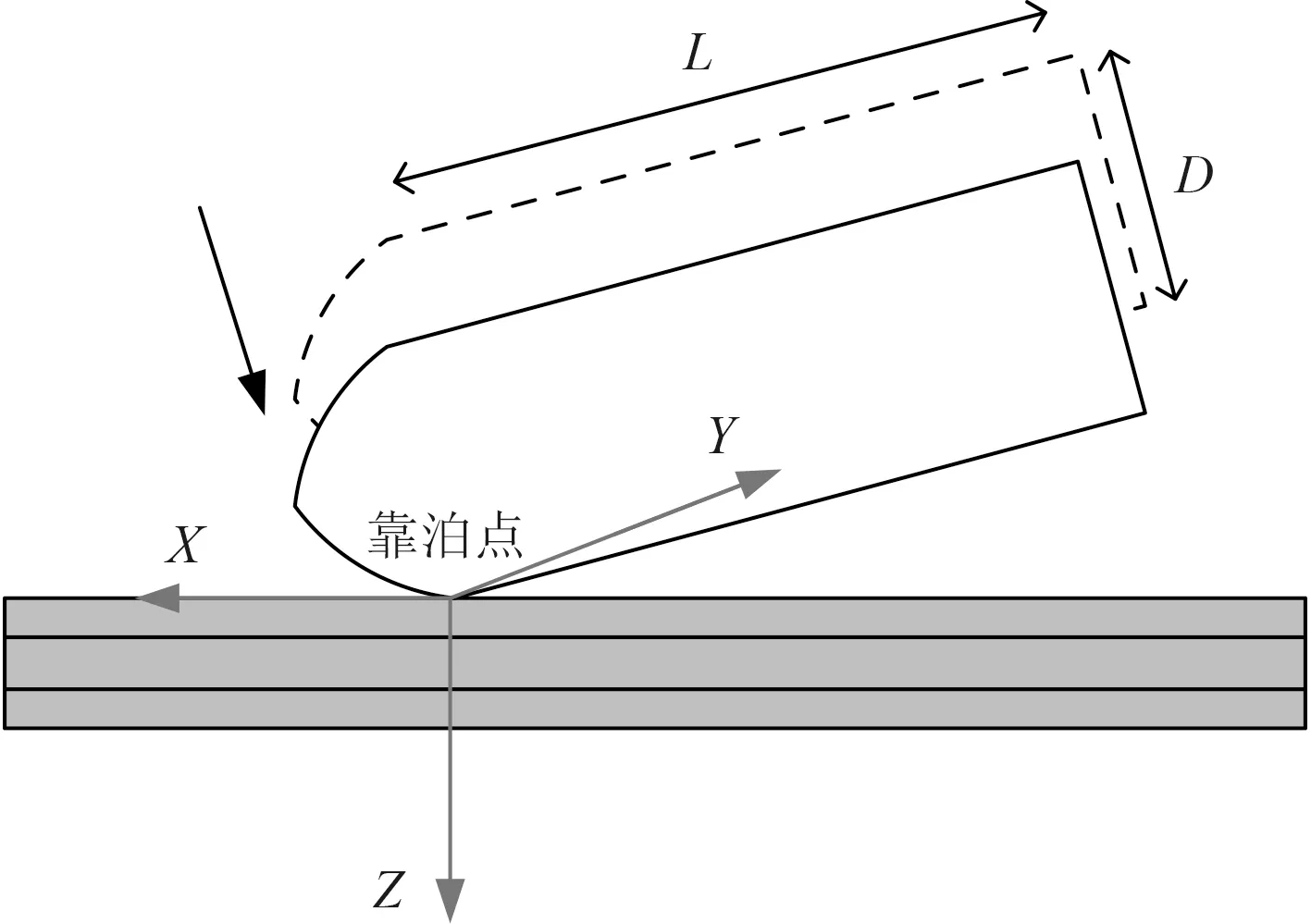
图1 船舶斜向靠泊的运动坐标系统Fig. 1 Motion coordinate system of ships berthing obliquely
建立船舶靠泊过程的动能方程为:
式中:E0为船舶靠泊过程的撞击动能;m为船舶的重量; ρ为船舶靠泊过程的有效动能系数,取0.8;V∗为船舶斜向靠泊的速度。
根据能量特性原理,斜向靠泊的动能均被船体和码头防撞结构吸收,即
式中:Fmax为船舶靠泊过程的最大撞击力。
定义C1和C2分别为船体和码头防撞结构的弹性变形系数,则
进而可建立船舶斜向靠泊过程的动力学模型为:
可知,船舶质量越大、速度越快,靠泊过程产生的撞击力越大。
1.2 靠泊过程外在载荷计算
船舶靠泊过程中,除了受到自身重力外,还要受到海风、海浪等冲击作用力,在进行船舶靠泊过程力学分析时,需要分别进行建模。
1)海风对船体的压力
将海风作用力分解为垂直于码头和平行于码头2 个分力,分别为:
式中:Fx为海风作用在船舶上的水平作用力;Fy为海风作用在船舶上的纵向作用力;Ax和Ay分别为2 个方向的受风面积;Vx和Vy分别为2 个方向的海风速度;ζ1和ζ2均为海风的风压不均匀折减系数。
船舶斜向靠泊过程的海风作用力曲线如图2 所示。
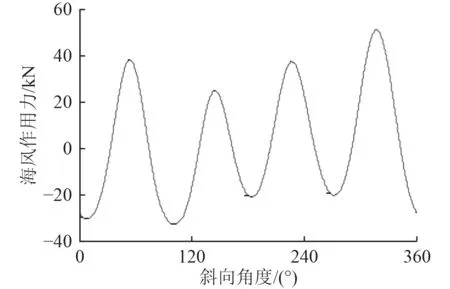
图2 船舶斜向靠泊过程的海风作用力曲线Fig. 2 Sea wind force curve during oblique berthing
2)水流作用力
水流对船舶靠泊过程的作用力建模为:
式中:Cxr为水流的分散系数;V为水流的速度;B为船舶吃水线以下的面积之和。
2 船舶靠泊过程的撞击力测试系统开发
2.1 船舶靠泊撞击力测试系统的整体设计
针对船舶靠泊过程的撞击力测量问题,建立船舶靠泊的撞击力测试系统,该系统从功能原理上可以分为传感器层、接口层和用户层3 部分,原理图如图3所示。
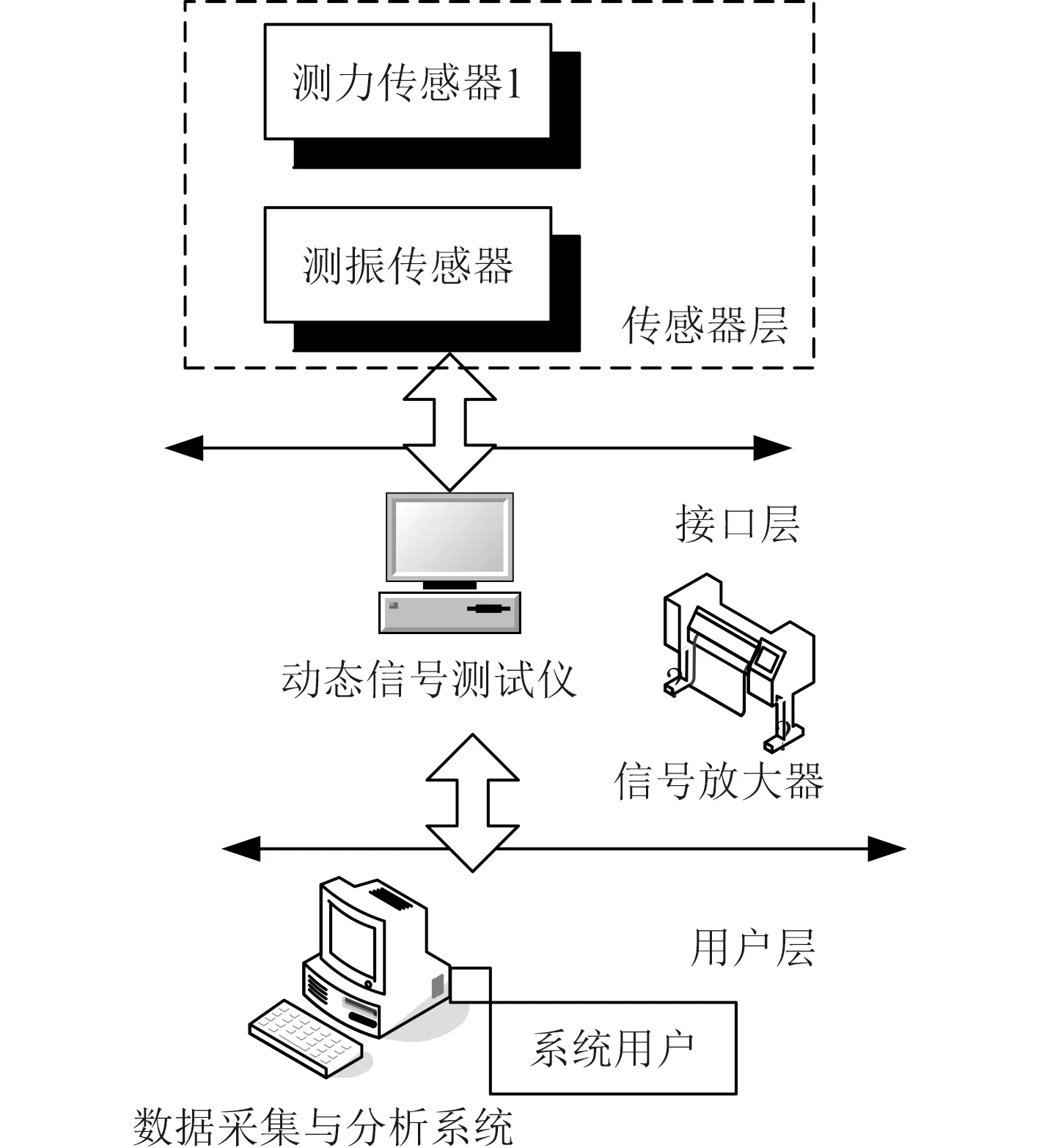
图3 船舶靠泊的撞击力测试系统原理图Fig. 3 Schematic diagram of impact force testing system for ship berthing
1)传感器层
传感器层是船舶靠泊撞击力测试系统的信号采集层,使用的传感器主要有测力传感器和测振传感器2 种。
2)接口层
接口层的主要功能是进行传感器数据的处理和通信,包括信号放大器、动态信号测试仪等。一方面,接口层的部件对传感器的数据进行过滤和初步处理;另一方面,接口层的通信模块采用串口通信形式,将传感器数据快速稳定的发送至用户层的上位机中。
3)用户层
包括撞击力测试系统的显示终端,测试系统面向用户的部分,借助靠泊撞击力测试系统,用户可以获取船舶靠泊过程的实时撞击力数据,一旦出现撞击力超出安全阈值的情况,测试系统触发报警装置,提醒船舶操纵人员。
2.2 撞击力测试系统的电阻应变测量原理分析
为了准确地对船舶靠泊过程的撞击力进行测量,本文采用的测量方法为电阻应变测量法,将电阻应变片粘贴在船体结构和码头防撞结构内,当船体或码头结构产生形变时,电阻应变片的阻值出现变化,通过测量应变片阻值的变化就可以获取撞击力的大小。
采用电阻应变测量的优势在于:
1)应变片的体积小、重量轻,测试和安装方便。
2)电阻应变测量的准确度高,灵敏度高,尤其是半导体应变片,精度可达0.1 μm。
3)电阻应变测量的量程范围广,从小型工业设备到大型船舶系统的力学测试都能胜任。
4)环境适应力强,由于码头位置的气象环境较恶劣,采用电阻应变片能适应高温、低温、高湿度等外界环境。
5)可实现有线或无线的电信号传输。
6)动态响应快。
应变片电阻与长度、横截面积、电阻率存在线性关系为:
当受力变形时:
使用应变片组成测量电桥进行船舶靠泊的撞击力测试,电桥原理图如图4 所示。

图4 应变片测量电桥原理图Fig. 4 Schematic diagram of strain gauge measuring bridge
该电桥中共有4 个电阻应变片(R1=R2=R3=R1=R),电桥电压值为:
可知,电桥电压值与每个应变片的电阻和应变相关,可得:
2.3 测试系统的传感器设计
在设计撞击力测试系统的传感器时,采用弹性元件材料,将测量电桥内置在弹性元件中,其主要原因在于:
1)弹性材料的强度极限和屈服极限高,能适应船舶的冲击作用力;
2)冲击韧性好,且能适应高温和低温环境;
3)可通过模具一次成型。
本文选用的弹性材料为40CrNiMoA,将测量电桥集成在码头的鼓型护舷中,鼓型护舷形状特征如图5所示。

图5 测试系统的鼓型护舷形状特征Fig. 5 Shape characteristics of drum fender of test system
鼓型护舷的规格如表1 所示。
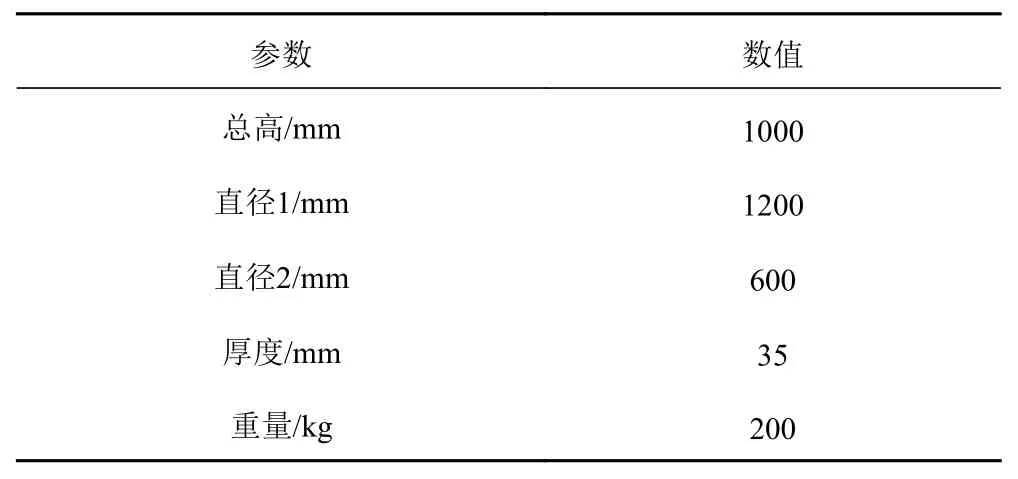
表1 鼓型护舷的规格表Tab. 1 Specification table of drum fender
2.4 撞击力测试系统的船舶靠泊撞击力测试
系统选择船舶参数排水量3 000 t,船长150 m,船宽15 m,吃水深度5.5 m,测得一定时间的船舶靠泊过程撞击力信号如图6 所示。
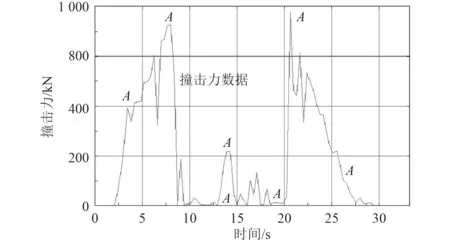
图6 船舶靠泊测试系统的撞击力信号Fig. 6 Impact force signal of ship berthing test system
3 结 语
船舶靠泊过程的撞击力测试系统可以采集靠泊过程的力学信号,防止船舶和码头出现严重的碰撞事故。本文结合靠泊过程的动力学模型和电阻应变技术,开发船舶靠泊过程的撞击力测试系统,取得了良好的测试效果。
