一种基于APES算法的弱ADS-B信号参数估计方法
2023-03-24李君惠赵浩然李武旭
李君惠,赵浩然,李武旭
(四川九洲空管科技有限责任公司,四川 绵阳 621000)
0 引 言
广播式自动相关监视(ADS-B)系统通过全球卫星导航系统(GNSS)等系统获得飞机的位置(经纬度、高度等)、速度、工作状态等信息,并把这些信息连同飞机的身份和类别信息按照固定的格式组成ADS-B信息帧,利用空-地、空-空数据链完成空中交通监视和航空器之间的信息传递。ADS-B系统是广播系统,不需要进行询问与应答,因而,相对于传统二次监视雷达,ADS-B简化了处理过程,可有效提高空管效率,并已成为一种应用极其广泛的空中交通管理技术。
虽然ADS-B系统具有建设成本低、监视范围广、精度高等诸多优势并且被各个国家广泛应用,但是由于建设成本和维护等原因,在偏远地区、沙漠、海洋等区域难以建设ADS-B地面站,因此难以实现上述区域的航空器监视覆盖。在这种情况下,星基ADS-B技术应运而生[1-3],星基ADS-B系统将高灵敏度的ADS-B接收机安装在低轨道卫星上,通过卫星接收、解析航空器发送的广播信息,实时传输到地面站并补充到空管系统中[4],由于卫星的覆盖面积广,因此提高了ADS-B的监视范围。实现星基ADS-B系统的关键技术之一是微弱信号处理,机载发射机系统并未针对星基ADS-B系统做出相应改进,进而导致卫星接收到的信号由于长距离传输功率很小。记l为损失功率,则有:
l=32.44+20lgD+20lgF
(1)
式中:D为信号传输距离;F表示信号频率,这里F=1 090 MHz。
经计算最大损耗可达160 dB以上,最小接收功率可达-105 dBm。在这种情况下信噪比极低,会严重影响ADS-B系统的信号处理与解码,从而降低系统性能,因此设计一套星基环境下的信号处理算法是星基ADS-B系统面临的重要技术挑战之一。
相干解调可以有效抑制噪声,是弱信号解调的有效途径之一。在相干解调算法实施的过程中,需要对接收信号的参数(频率和相位)进行较为精确的估计,而在低信噪比情况下估计信号的参数较为困难,是实现相干解调面临的主要问题。常用的信号频率估计算法主要是两步法:第1步是对要估计的信号进行快速傅里叶变换(FFT),选取峰值作为信号频率的粗估计;第2步是精估计,利用比值法等方法进行信号频率精估计[5-7]。除两步法外,也有直接利用时域信号进行估计的算法[8]。这些算法在频率估计时都能取得良好的效果,但是缺点是不能同时估计信号的相位,Feng T和Liang J 提出基于遗传算法的频率相位估计[9],可以有效解决低信噪比下信号参数估计,但是该算法的运算量较大,不利于工程上的实时计算。基于以上分析,本文提出基于幅度相位估计(APES)算法的弱ADS-B信号频率相位估计算法。首先对信号进行非相干解调并译码,找到信号的高置信度码位,之后利用高置信度码位处的信号集合对信号使用改进后的APES算法进行频率和相位估计,估计值可用于对信号重新相干解调,从而提高信噪比和正确译码概率。为了提高算法效率,本文介绍的方法先利用FFT对信号频率进行粗估计,使用APES算法进行精估计。仿真结果表明,在低信噪比和低采样率的情况下,算法达到了较高估计精度,且计算量相对较小。
1 信号频相估计方法
1.1 ADS-B信号格式
现行ADS-B系统的3种信号体制分别是1090ES数据链、VDL-4以及UAT数据链,其中1090ES数据链是目前应用最广泛的信号体制,同时也是被国际民航组织标准化的信号体制,因此本文针对1090ES信号格式的信号展开研究。
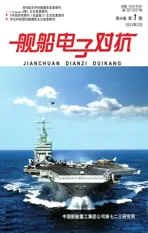
1090ES数据链信号的发射频率为1 090 MHz,允许存在1 MHz以内的偏差,信号帧长为120 μs,采用脉冲位置调制(PPM)。120 μs的信号帧长分为8 μs的报头信号和112 μs的数据域,报头包含4个前导脉冲,这4个脉冲分别位于0 μs、1 μs、3.5 μs和4.5 μs处,从第8 μs开始为数据位,数据位长112 μs,共有112位,每位包含2个码元。若脉冲位于前置位码元,则该码元表示本位为1;若脉冲位于后置位码元,则表示本位为0[10],如图1所示。
图1 ADS-B信号格式
1.2 APES算法简介
APES算法,也称为APES滤波器,用于信号的幅度和相位估计,于20世纪90年代被Li等人提出[11-12]。假设滤波器输入信号x(n)是复正弦信号加白噪声,则:
(2)
式中:v(n)为加性白噪声;αk和ωk分别为第k个信号的幅度和角频率,复幅度αk=|αk|ejφk,包含了信号的振幅和初相位。
现设计一个M个抽头的有限长单位冲激正响应(FIR)滤波器,使得期望频率为ω1的信号能够无失真地通过滤波器,同时极可能抑制信号x(n)中的其它频率分量和噪声。定义向量和滤波权向量:
x(n)=[x(n)x(n-1)x(n-2) …x(n-M+1)]T
(3)
w=[w0w1w2…wM-1]T
(4)
信号x(n)通过滤波器的输出为:
y(n)=wHx(n)=xT(n)w*
(5)
定义向量和矩阵:
(6)
(7)
(8)
(9)
则有:
x(n)=As(n)+v(n)∈M×1
(10)
为了使期望频率为ω1的信号能够无失真地通过滤波器(即wHa(ω1)=1),同时极可能抑制信号x(n)中的其它频率分量和噪声,即转化为下列约束优化问题:
st.wHa(ω1)=1
(11)
考虑更一般的情况,用ω代替ω1,则可对任意频率进行滤波,约束优化问题变为:
st.wHa(ω)=1
(12)
经推导,针对任意ω可得最优权向量为:
(13)
可得到信号复幅度α估计为:
(14)
(15)
(16)

g(ω)定义如下:
(17)
(18)

在使用APES算法时,要能对信号样本的相关矩阵进行准确估计;同时由于计算机计算幅度谱时是通过离散点描述的,若想提高精度则需要减小幅度谱离散点间隔,进而增加计算量。针对星基ADS-B信号,其调制方式造成信号在持续时间内不是连续的,并且在工程实施过程中采样率低,信噪比低,APES算法不能直接使用,下一节将给出解决方法。
1.3 星基信号估计方法
由1.1可知,当检测到ADS-B信号后,其调制方式决定检测到的信号不是连续的正弦信号,而是分段连续的相参正弦信号(每段是一个脉冲),分段信号之间是由噪声填充,并且考虑到工程实施时译码采样率一般较低(1个脉冲即一段信号,一般只包含5个点),若只用1个脉冲直接估计其频相,则相关矩阵估计得很不准确,并且因为是奇异矩阵,因此难以直接应用APES算法进行估计。
鉴于以上原因,考虑到实际上ADS-B信号的持续时间比较长,因此如果能利用所有有效脉冲信息去估计信号参数,则可以取得良好的效果。该方法的实现如下:
第1步,对混频后的低频信号进行采样,并进行非相干解调,求信号幅度和解码,若解码过后通过校验,则不需要进行相干解调,流程结束,若未通过校验,则进入第2步。
第2步,利用第1步中的解码结果,提取高置信度码位,作为第3步输入。
(19)
(20)
式中:D为ADS-B中高置信度脉冲的个数;ni为高置信度脉冲的位置。
第4步,对混频后的低频采样数据先进行FFT,再进行APES算法估计,利用APES算法来估计信号的频率和相位时,只需要计算FFT后频谱最高峰的左右峰之间的幅度谱即可,因此可大幅减少APES算法的计算量。
第5步,获得信号的频率和相位。
上述过程只利用了高置信度码位的信号来估计信号参数,在充分利用信息的同时,防止了低置信度码位噪声过大造成的影响,同时利用FFT减少了估计运算量,仿真分析表明该方法具有较高的精度和相对较少的计算量。
2 仿真分析
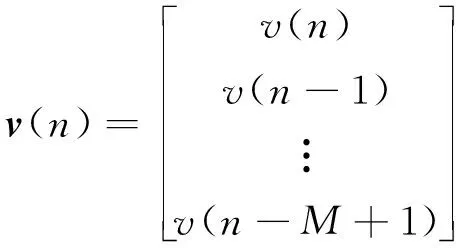
对算法进行仿真,取采样率为10 MHz,即每个脉冲含5个点,取高置信度脉冲个数为30个,基带信号如图2所示,幅度谱结果如图3所示。结果表明,在取幅度谱离散点较多时频率估计误差很小,相位误差约0.03 rad。
图2 基带信号
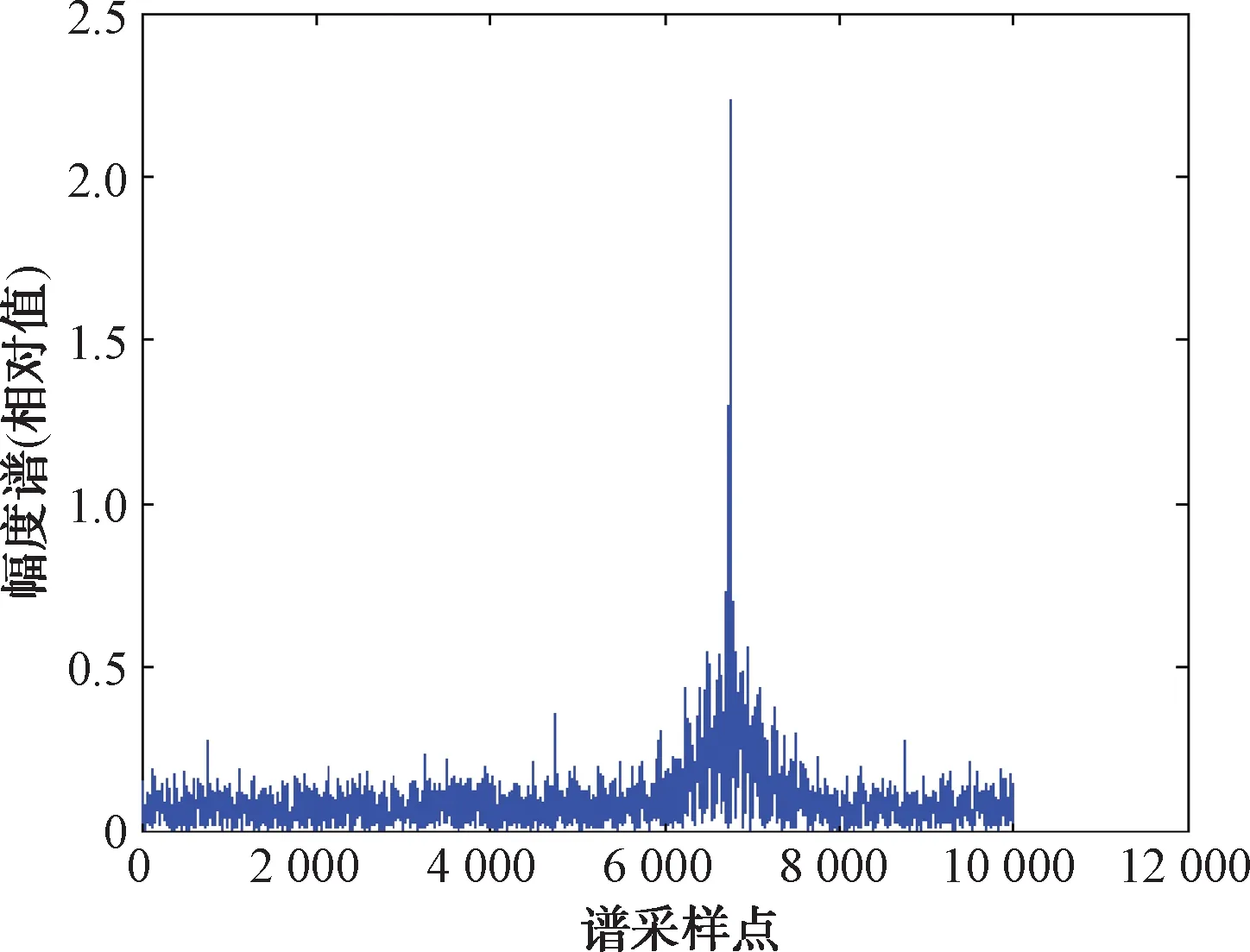
图3 D=30时算法性能
若把高置信度脉冲个数提高为50个,相位估计效果进一步提高,幅度谱效果如图4所示。
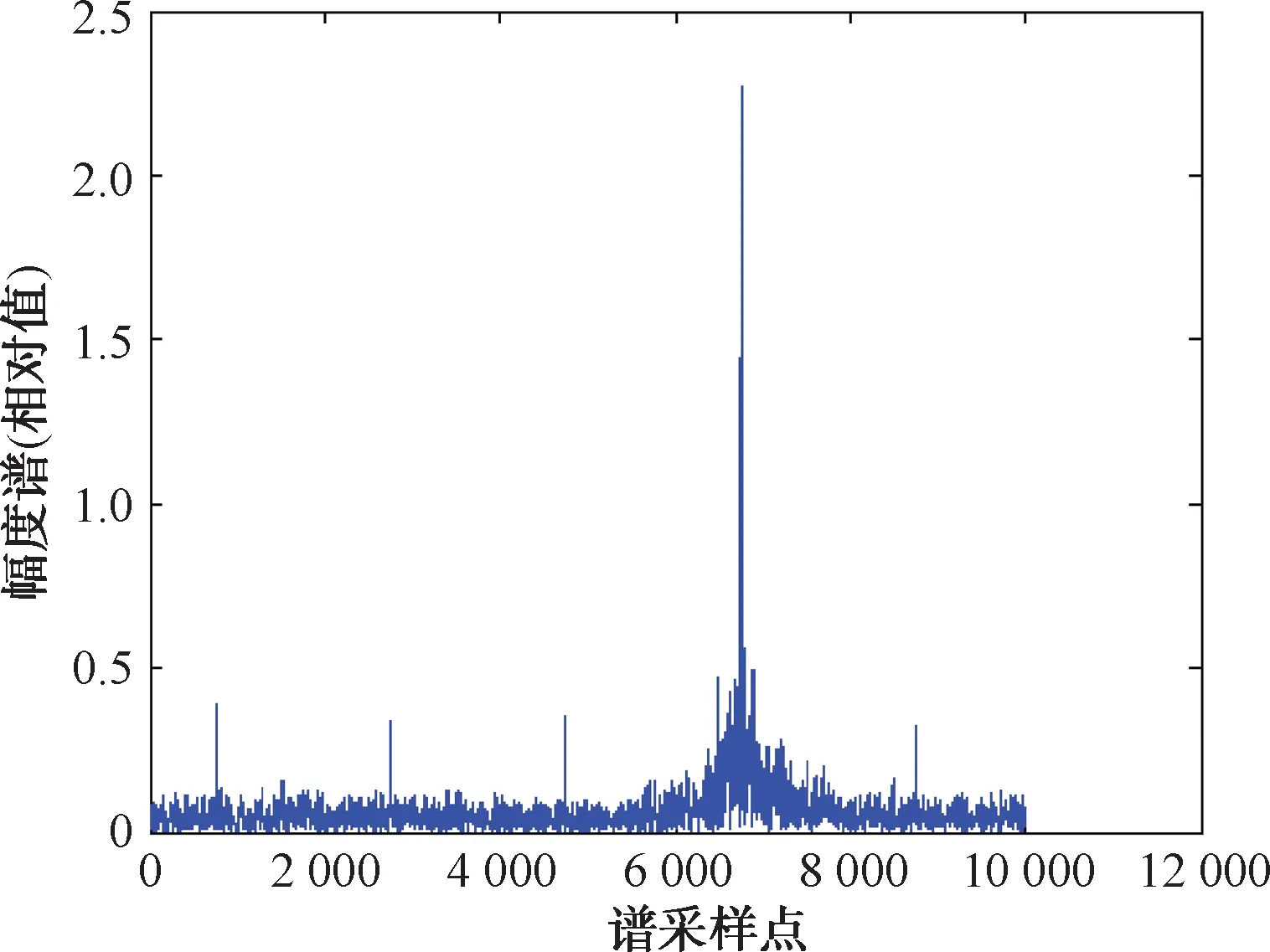
图4 D=50时算法性能
3 结束语
星基ADS-B系统是ADS-B系统的重要发展方向,相对于传统系统,该系统在安全性方面可提供覆盖全球的持续稳定的飞机监视能力,能够更好地支持安全管理系统,同时在效率和成本方面有较大提升。针对星基系统面临的挑战,本文介绍了一种基于APES算法的弱ADS-B信号参数估计方法。首先对信号进行非相干解调并译码,找到信号的高置信度码位,之后利用高置信度码位处的信号集合对信号APES算法进行频率和相位估计,估计值可用于对信号重新相干解调,从而提高信噪比和正确译码概率;同时利用FFT对信号频率进行粗估计,再使用APES算法对FFT峰值附近精估计,大幅减少了运算量。仿真结果表明,在低信噪比和低采样率的情况下,算法达到了较高估计精度。