一种车载雷达行进间目标稳定跟踪方法
2023-03-24邓丽颖
邓丽颖,陈 磊
(中国电子科技集团有限公司第三十八研究所,安徽 合肥 230088)
0 引 言
雷达是现代防空武器系统中主要的侦测手段,在作战中发挥着“千里眼”的作用。随着隐身武器装备以及低空、超低空巡航导弹的快速发展,为了提高雷达的战场生存能力和作战效能,要求武器装备具备灵活的机动性[1-2]。常规车载雷达的机动性主要体现在快速架设和转移,在雷达工作时车体处于静止状态。若在车体平台运动过程中同时进行目标搜索探测,将进一步增强雷达的战场生存能力和提高雷达的作战效能[3]。
1 问题分析
雷达行进间工作对于航迹跟踪软件而言,主要是对目标和战车产生的相对运动进行数字补偿和处理[4]。战车行进时产生的振动和倾斜,使得车体平台相对于车体站心坐标系(战车位置所在地理坐标系)存在姿态变换,可以用横滚、俯仰和偏航3个姿态角来表示。一般定义车体头部为纵轴正向,沿车体纵轴正向,车体纵轴的右边定义为车体横轴正向[5]。俯仰角绕车体横轴正向轴顺时针方向为正,横滚角绕车体纵轴正向顺时针方向为正,偏航角沿正北逆时针方向为正,如图1所示。惯导设备安装在车体平台上,实时获得车体平台的姿态角信息,以补偿车体姿态运动。
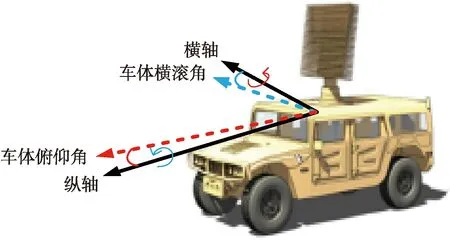
图1 车体姿态变换示意图
战车在运动过程中,雷达测量的点迹处于一个动坐标下,不同时刻战车所在的位置不同。由于目标和雷达的相对运动,该坐标系下的点迹将无法进行相关和滤波。为了方便后续的跟踪处理,需要建立一个虚拟的静止坐标系,通常将战车初始位置为原点的地理坐标系作为静止参考坐标系。航迹跟踪软件接收到相对于雷达阵面坐标系的点迹信息,将其转换至车体平台坐标系后再进行姿态补偿,转换至车体站心坐标系,最后转换至虚拟静止坐标系,便可在虚拟静止坐标系下进行后续的计算和处理。
2 行进间工作数据处理实现
2.1 坐标系的设定
雷达阵面坐标系:以阵面中心为原点(通常认为与雷达战车中心重合),主面为雷达阵面,z轴指向阵面法线,x轴为当地水平面与主面的交线,y轴在主面内指向上,构成右手坐标系。
车体平台坐标系:以车体中心为原点,y轴沿车体纵轴向车体前进方向,x轴沿车体平面垂直于y轴向右,z轴垂直于车体平面向上,构成右手坐标系。
车体站心坐标系:以车体中心为原点的东北天坐标系,由于战车运动,该坐标系的原点在不断变化,是一个动坐标系。
虚拟静止坐标系:以初始时刻的车体中心为原点的东北天坐标系。
2.2 行进间坐标补偿
每个坐标系之间的姿态变换通过旋转矩阵关联,这个旋转过程由绕x、y、z3个轴的3个姿态角α、β、γ的变换完成,旋转过程如图2所示。C为旋转矩阵。
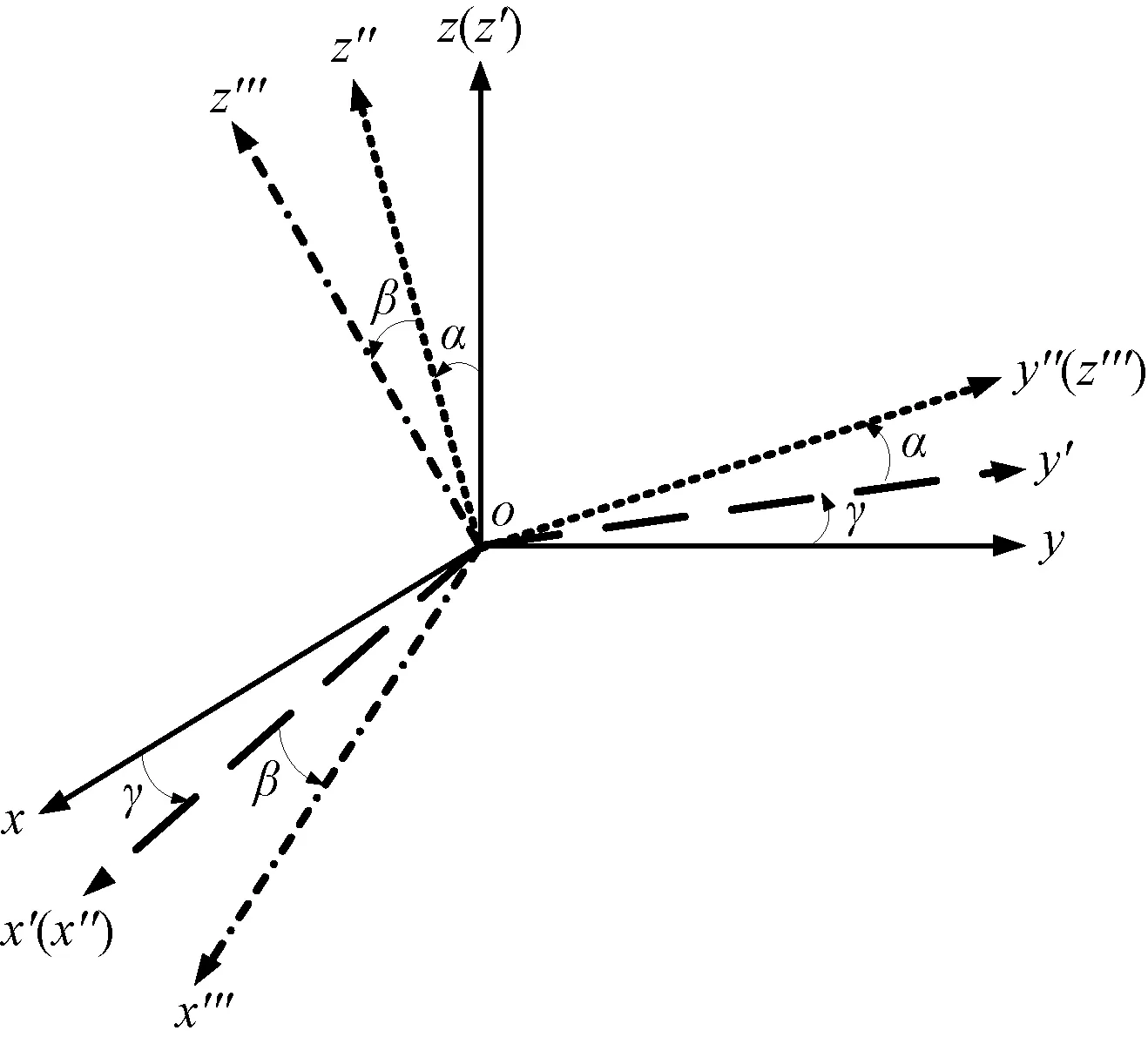
图2 坐标变换示意图

(1)
对于阵面坐标系下目标点迹数据A(r,a,e)采用极坐标表示,首先要将其转换到直角坐标系下A(x,y,z)。阵面坐标系与车体平台坐标系的姿态变换通过天线的方位和俯仰体现,将点迹转换至车体平台坐标系A′(xp,yp,zp),则:
(2)
惯导设备安装在车体平台上,实时获得车体平台的姿态角信息,每个点对应的当前车体的姿态角信息存在点迹报文内传入,以补偿车体姿态运动。可得车体站心系下点迹数据A″(xc,yc,zc)为:
(3)
用极坐标表示为A″(rc,ac,ec)。姿态补偿过程如图3所示。
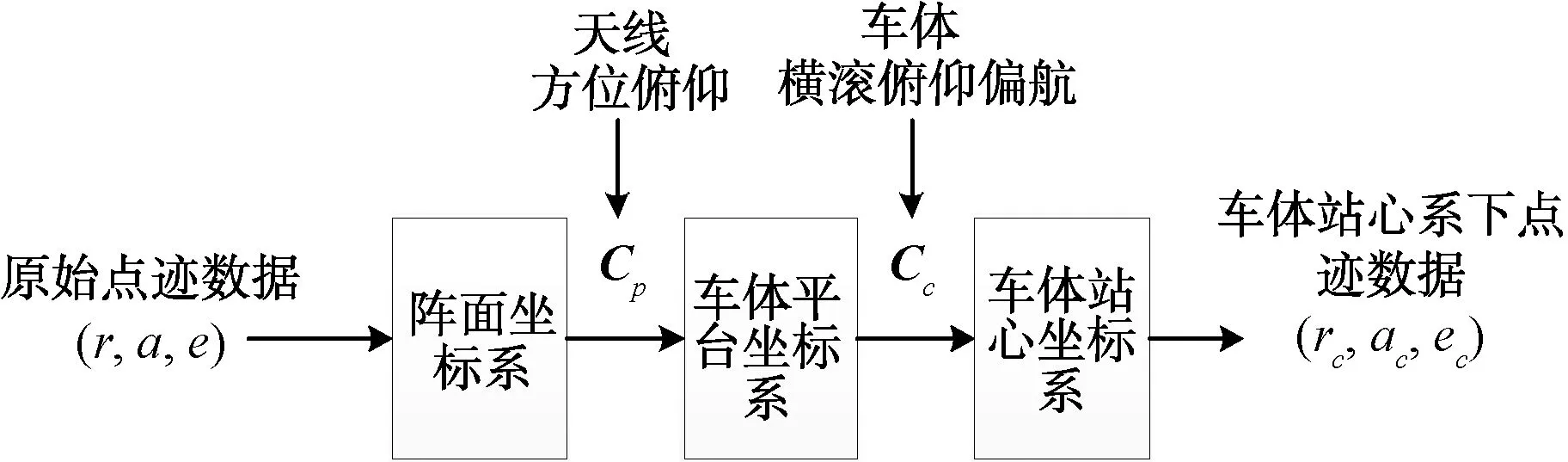
图3 姿态补偿过程
通过姿态补偿后,去除了车体姿态变换对目标位置信息的影响,但车体行进间仍存在水平方向的位移。目标的跟踪处理应在稳定的静止坐标系下进行,因此需建立一个虚拟的静止坐标系来保证行进间稳定的目标跟踪,通常将战车初始位置为原点的东北天坐标系作为静止参考坐标系。
通过初始化雷达站心坐标,可实现某一时刻目标位置对应站心坐标和绝对经纬高的相互转换。战车在行进过程中其绝对位置(Lc,Bc,Hc)可通过惯导设备测量获得,雷达开机时记录初始时刻绝对位置(Lv,Bv,Hv)为虚拟点位置。利用战车位置初始化雷达站心坐标,将车体站心坐标下的目标点迹(rc,ac,ec)转换成WGS84坐标系下绝对经纬高(L,B,H),再利用虚拟点位置初始化雷达站心坐标,将目标经纬高(L,B,H)转换到虚拟静止坐标系下(rv,av,ev),过程如图4所示。
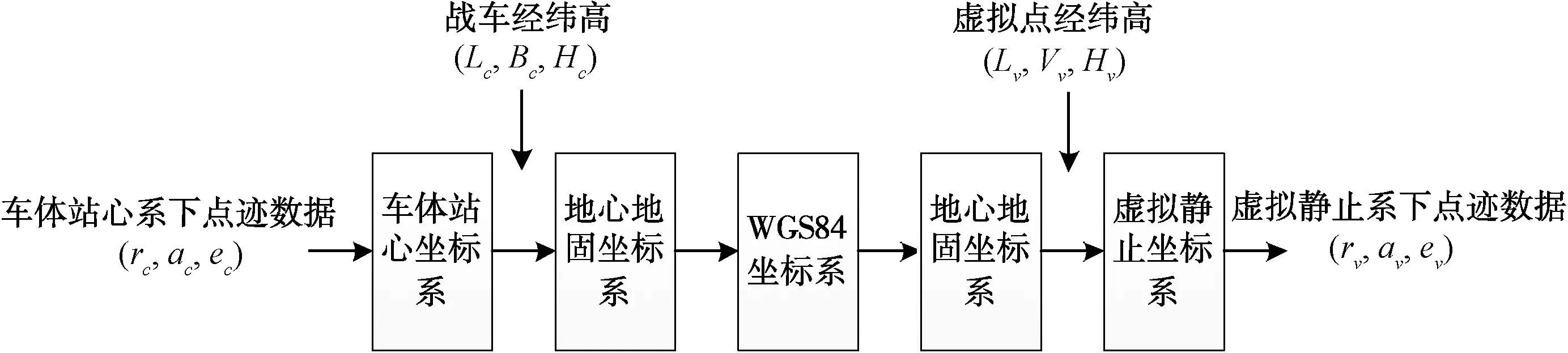
图4 转换至虚拟坐标系过程
目标点迹经过这一系列处理后,去除了目标与战车的运动带来的影响,实现了行进间补偿,后续可在虚拟静止坐标系下进行稳定的跟踪滤波。
3 实验结果
采用某车载雷达的行进间试验数据对该方法验证。初始时战车静止不动,目标飞机进入后稳定跟踪,飞行速度为210 m/s。当目标飞过航捷,飞行至相对于战车20 km处时,战车开始向前行驶,行驶速度在5 m/s以内,行驶时车体倾斜发生的横滚角在-1°~0.6°之间变化,发生的俯仰角在-1.6°~0.6°之间变化。由惯导设备测量的姿态信息和战车速度信息如图5和图6所示。行进间的目标跟踪效果如图7~图9所示。
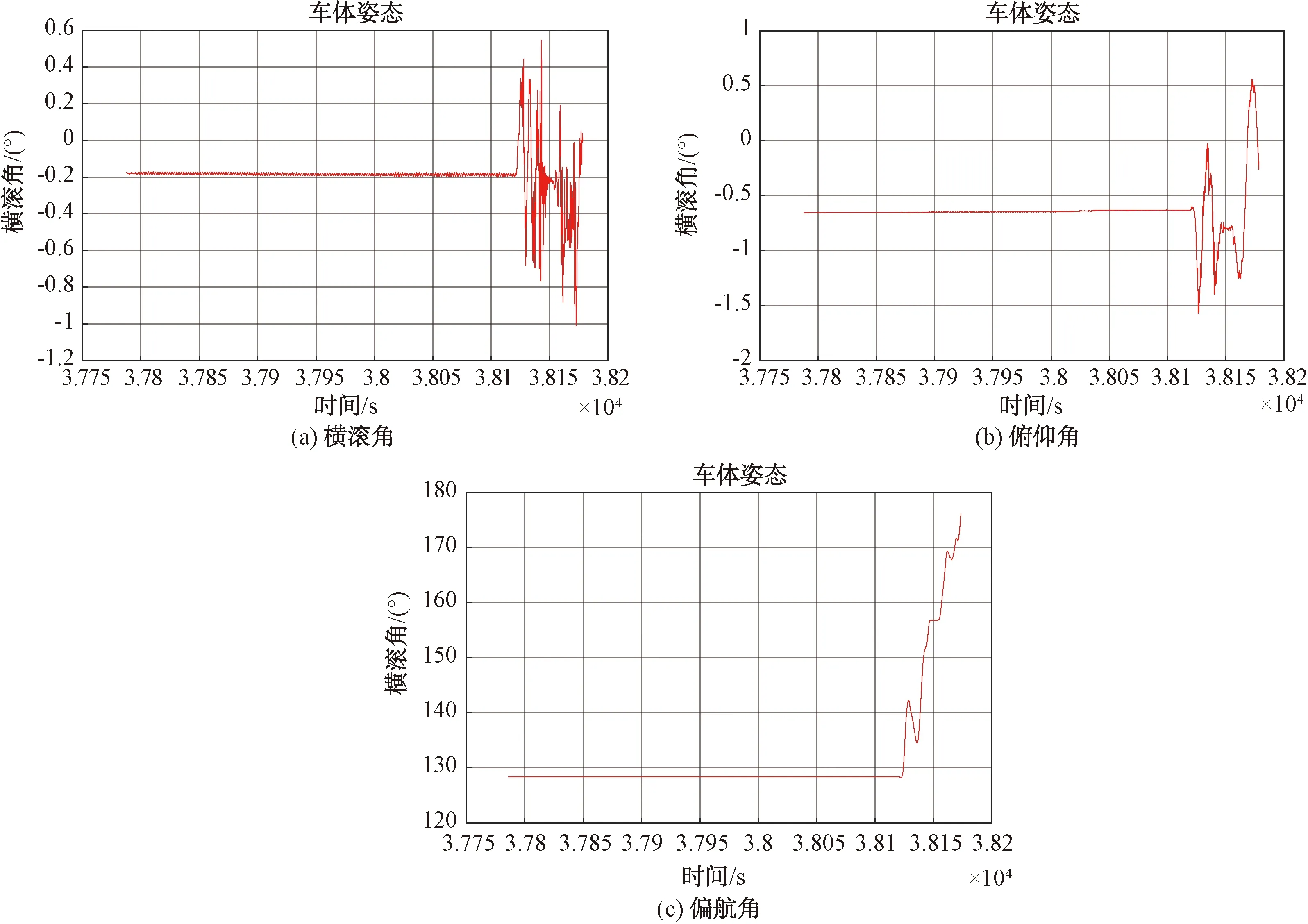
图5 车体姿态角时间变化图
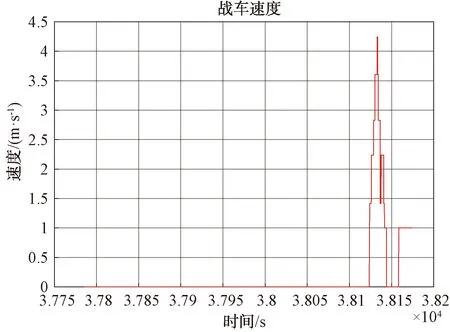
图6 战车速度时间变化图
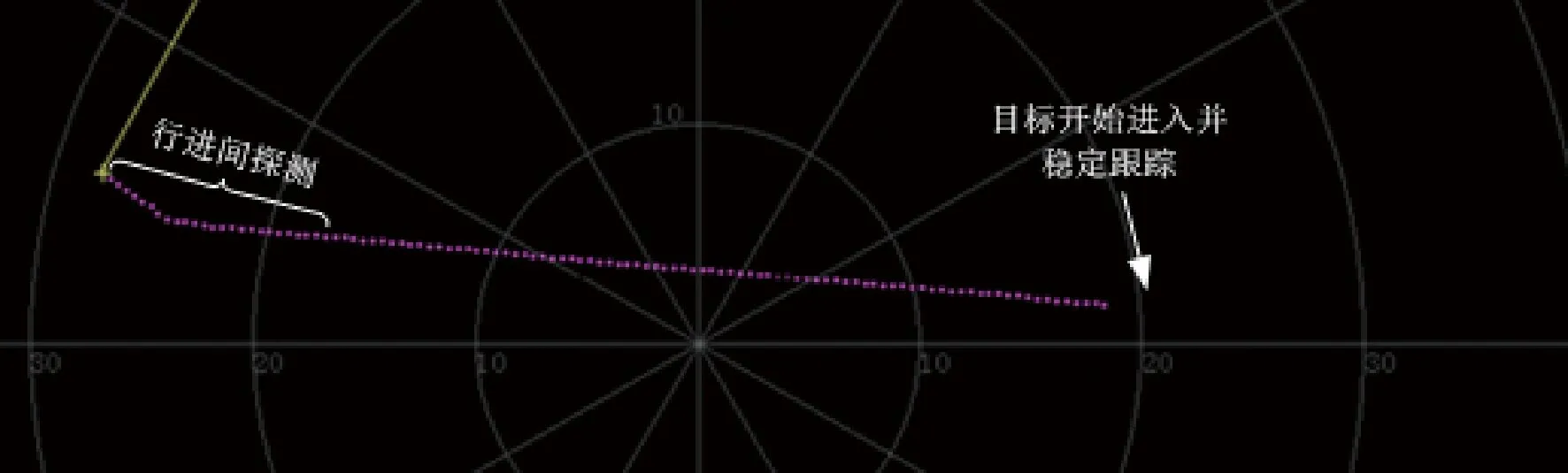
图7 目标跟踪P显结果示意图
由图5、图6可知,在绝对时间38 120 s左右时,车体的姿态和速度开始发生变化,可判断此时战车开始运动,雷达开始行进间探测。图8中,绝对时间38 120 s对应的目标距离为20 km,该距离为目标相对于战车的斜距。行进间探测效果可分别观察图7和图9在距离20 km处和绝对时间38 120 s左右的目标跟踪情况,图7中P显上航迹在20 km处依旧稳定跟踪,图9中在绝对时间38 120 s之后的目标速度在内8 m/s变化,变化较小,相对稳定。因此雷达在行进间工作时,仍能够保证目标的稳定跟踪。
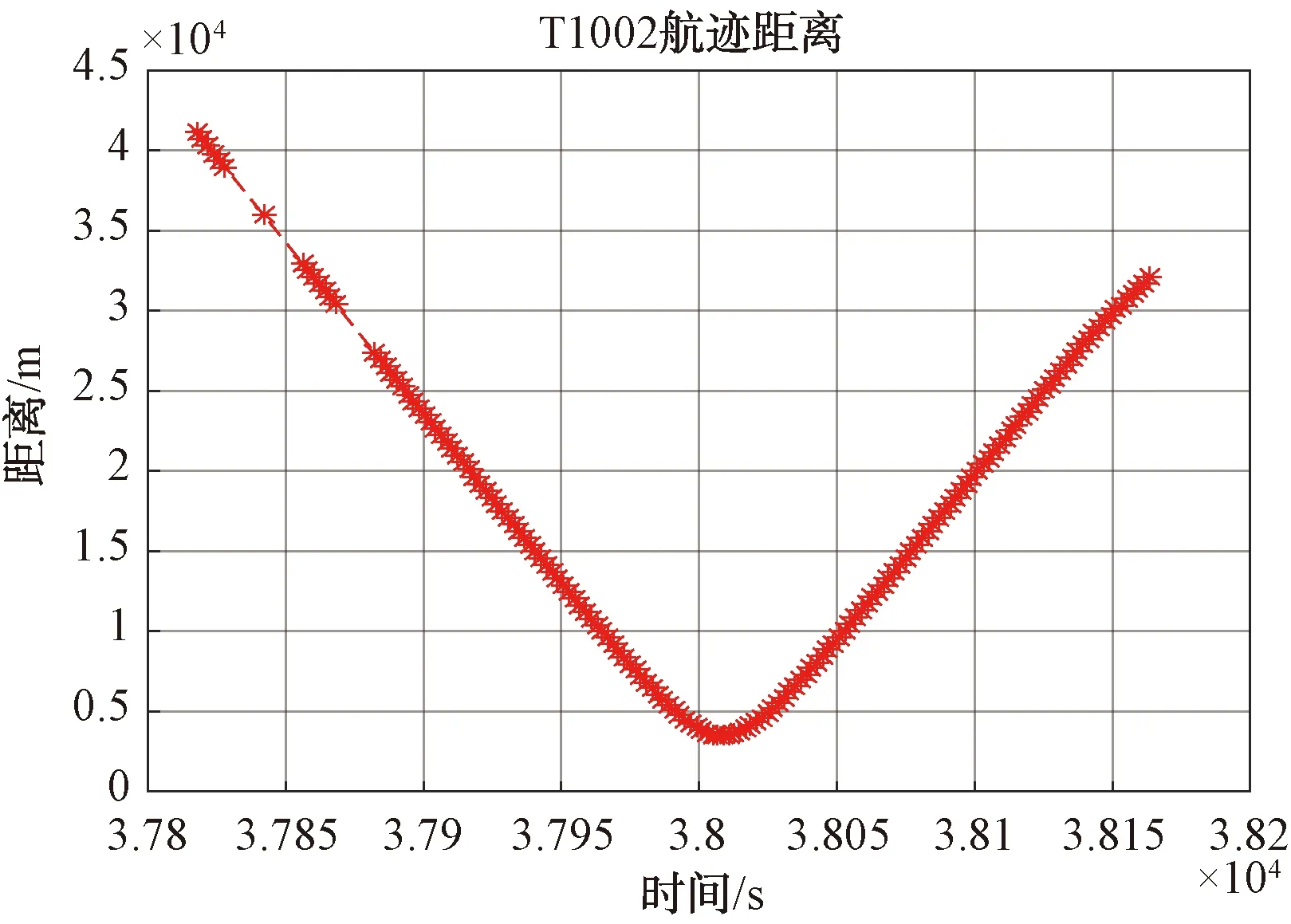
图8 目标航迹时间-距离图
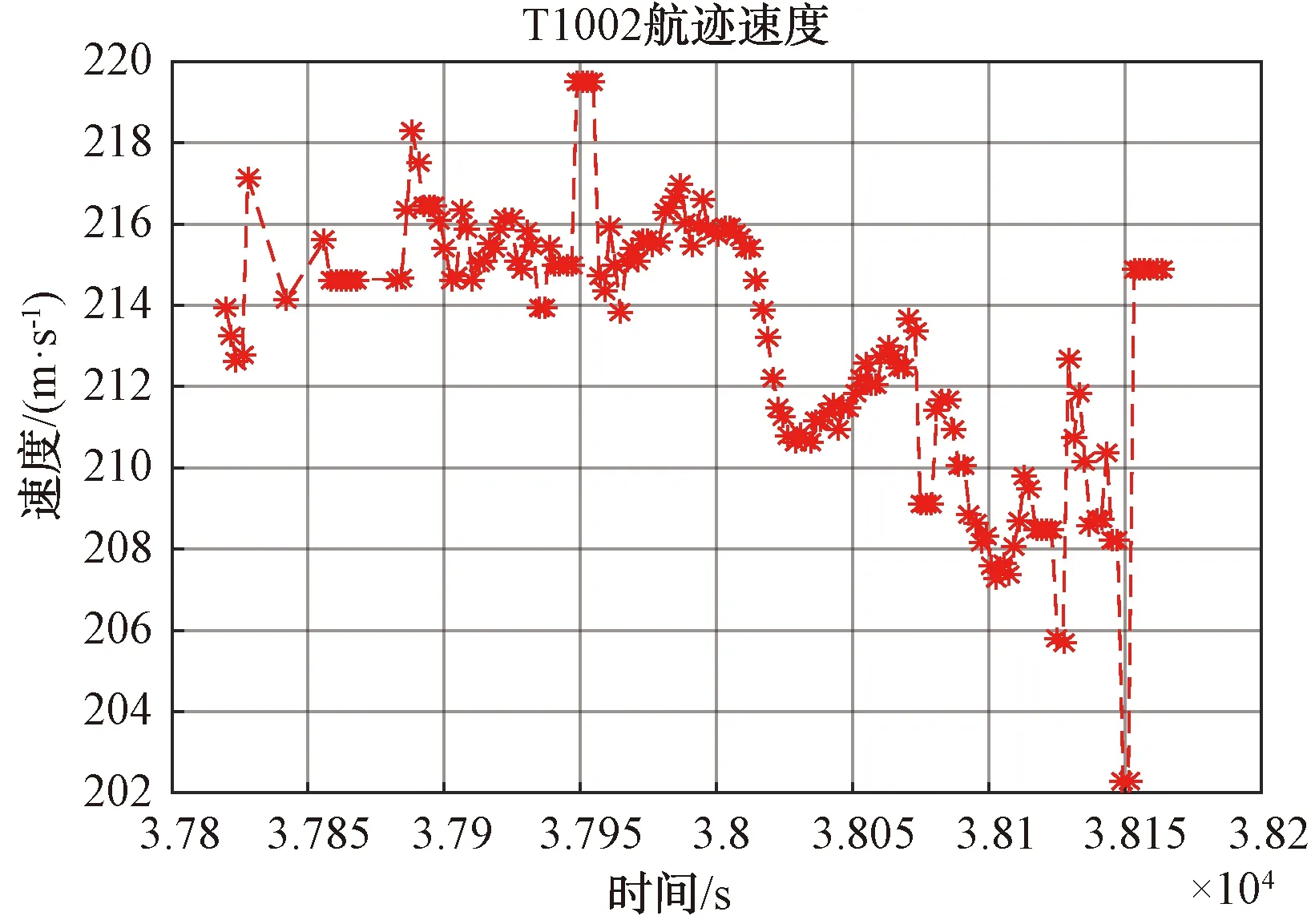
图9 目标航迹时间-速度图
4 结束语
本文对车载行进间雷达数据处理技术进行了研究,主要针对运动坐标系下的点迹进行坐标转换和补偿,建立一个稳定的虚拟静止坐标系,便于后续的相关和跟踪处理。结合实验数据,验证了该方法可实现目标的稳定跟踪。