基于不同PPP 模型的北斗三号相位小数偏差估计与新特性分析
2023-03-23吴飞扬李昕
吴飞扬,李昕
(武汉大学 测绘学院,武汉 430079)
0 引言
北斗卫星导航系统(BDS)是中国自主建设、独立运行的卫星导航定位系统[1],是服务于国防安全与国民经济的重要空间基础设施.截止至2020年7月31日,我国北斗三号全球卫星导航系统(BDS-3)已全面建成,包括3 颗地球静止轨道(GEO)卫星,3 颗倾斜地球同步轨道(IGSO)卫星与24 颗中圆地球轨道(MEO)卫星.目前,BDS-3 与区域北斗二号卫星导航系统(BDS-2)共同向全球用户提供全天候、全天时、高精度的导航定位服务.
精密单点定位(PPP)技术是BDS 提供高精度位置服务的重要技术途径,使用单台接收机的伪距及相位观测值即可以实现广域厘米级定位,目前已在大地测量、空间环境、气象学等科学研究以及无人驾驶、无人机测绘等工程方面获得广泛应用.PPP 中的一个关键性难题在于非差模糊度固定,成功固定非差模糊度可以使PPP 的收敛速度和定位精度得到显著提升.相位小数偏差(UPD)是致使相位模糊度失去整数特性的主要因素,精确估计并校正UPD 是实现非差模糊度固定的重要前提,也是实现BDS 高精度定位的关键[2-4].
从全球卫星导航系统(GNSS)原始观测方程出发,可以构建多种PPP 函数模型,其中应用最为广泛的模型主要有无电离层组合(IF)模型[5-6]与非差非组合模型[7-8].当选择不同的函数模型时,对应的UPD估计方法也有所不同.早期,众多学者多采用IF 方式估计UPD.目前,法国宇航局、武汉大学等研究机构也多基于IF 模型生成UPD 产品,估计得到UPD 可以有效地恢复模糊度的整数特性,实现模糊度固定.由于非组合模型保留了电离层等原始观测信息,且可扩展性较强的优势,在多系统GNSS 条件下受到更多的关注.辜声峰等[9]建立了非差非组合模型的卫星钟差与时延偏差处理方法、电离层延迟处理方法等;周锋等[10]研究了多系统GNSS 实时非差非组合PPP 在精密定位、对流层延迟和电离层延迟估计的性能分析;李星星等[11]使用非差非组合PPP 模型估计L1和L2 频率上的UPD,实现了3~5 cm 的模糊度固定定位精度;目前对于非差非组合模型UPD 的研究还相对较少,但随着不同PPP 模型和多系统GNSS 观测数据可用性的发展,未来非差非组合PPP 模型UPD 将广泛应用于多频精密单点定位-模糊度固定(PPP-AR)等方面.
尽管众多学者围绕UPD 估计已开展了大量研究工作,但针对两种PPP 模型在UPD 估计方面的对比探究及特性分析目前还比较少.随着我国BDS-3 的全面建成,围绕BDS-3 的UPD 估计及其特性分析有待进一步研究.本文基于不同的PPP 模型,从理论推导与实际测试两个方面对比分析两种组合模型估计UPD 的有效性与一致性.采用BDS-3 观测数据基于两种组合模型分别估计宽卷(WL)、窄巷(NL)UPD,着重分析BDS-3 UPD 的时间稳定性,以及不同模型估计UPD 结果的一致性.
1 北斗UPD 估计方法
为了精确估计UPD,首先需要获取高精度的浮点模糊度信息,不同PPP 模型获取浮点模糊度的方式不同.由于原始观测中模糊度波长较短,残余大气误差、多路径效应、观测噪声等因素都容易影响精确小数部分的获取,因此,UPD 估计时通常将其组合成模糊度波长较长的WL 模糊度,之后再利用整周WL 模糊度作为约束获得更加准确的NL 模糊度的方式进行UPD 估计.
1.1 基于IF 模型获取WL 与NL 模糊度
IF 模型采用双频或多频观测值构建IF 观测值,线性化后其载波相位和伪距的组合观测值可以表示为:
在基于IF 估计UPD 的方法中,通过HMW(Hatch-Melbourne-Wübbena)[12-13]组合计算可得到WL 模糊度,通过整周WL 模糊度和浮点无电离层组合模糊度可计算得到NL 模糊度,具体计算公式为
1.2 基于非差非组合模型获取WL 与NL 模糊度
IF 模型增大观测噪声,且丢失了原有的电离层信息[14],而非差非组合模型直接采用原始观测值进行PPP 解算,除了与IF 相同的估计参数外,还需估计电离层参数.
根据GNSS 原始观测方程,线性化后构建OMC双频非差非组合观测模型
相比之下,非差非组合模型具有四个较为突出的优点,包括:1)避免IF 放大残余模型误差以及观测噪声;2)模型可扩展性强,在多频环境下避免了IF 中的频率选择问题;3)估计了电离层参数,可以通过外部电离层信息如电离层模型、电离层改正数等约束定位法方程加速收敛;4)保留了电离层信息,估计得到的电离层信息可以用来进行电离层建模与反演、差分码偏差估计等研究[15-19].
在非差非组合模型中,WL 模糊度通过原始模糊度做差得到,NL 模糊度同样通过整周WL 模糊度和原始模糊度组成的IF 模糊度计算得到,具体为
1.3 UPD 估计
而在非差非组合模型中,两个频率上的模糊度参数表达为
将式(6)带入式(3)中,式(7)带入式(5)中,整理后均可得到同一UPD 表达式为
由此可知,在使用相同处理策略的前提下,基于IF和非差非组合模型构建的WL、NL 模糊度在理论上具有一致性.实际测试中发现采用HMW 组合得到的WL 模糊度通常需要数个历元的平滑才能收敛,而非差非组合模型估计得到的WL 模糊度收敛更快.原因可能是由于IF 模型中WL 模糊度基于HMW 组合得到,受伪距观测噪声的影响更为直接,采用逐历元平均的方法仍需要数个历元才能收敛;而非差非组合模型充分利用了伪距与相位的观测信息,考虑了模糊度参数与非模糊度参数间的线性关系以及历元间的几何变化关系,相较于HMW 组合,可以实现更加快速的收敛.
根据式(8)可以构建UPD 估计的基本观测量,将浮点模糊度表达为整周模糊度与其对应的卫星端、接收机端 UPD 之和,因此BDS 的UPD 观测方程为
假设有a个测站,每个测站可观测到b颗卫星,根据参考网的观测数据使用最小二乘方法估计得到BDS 的WL和NL 的UPD,如下述公式:
式中:C为BDS;dr,C与ds,C分别为接收机端与卫星端的UPD;Ri和Si分别为接收机端与卫星端UPD 的系数矩阵;由于在根据观测方程使用最小二乘方法求取WL和NL 相位偏差时系统存在一个秩亏数,所以需要在每次解算过程中选择一颗卫星或一个测站的UPD作为基准,对应接收机UPD 需要设置为0.
给出UPD 的基本流程图,如图1 所示.
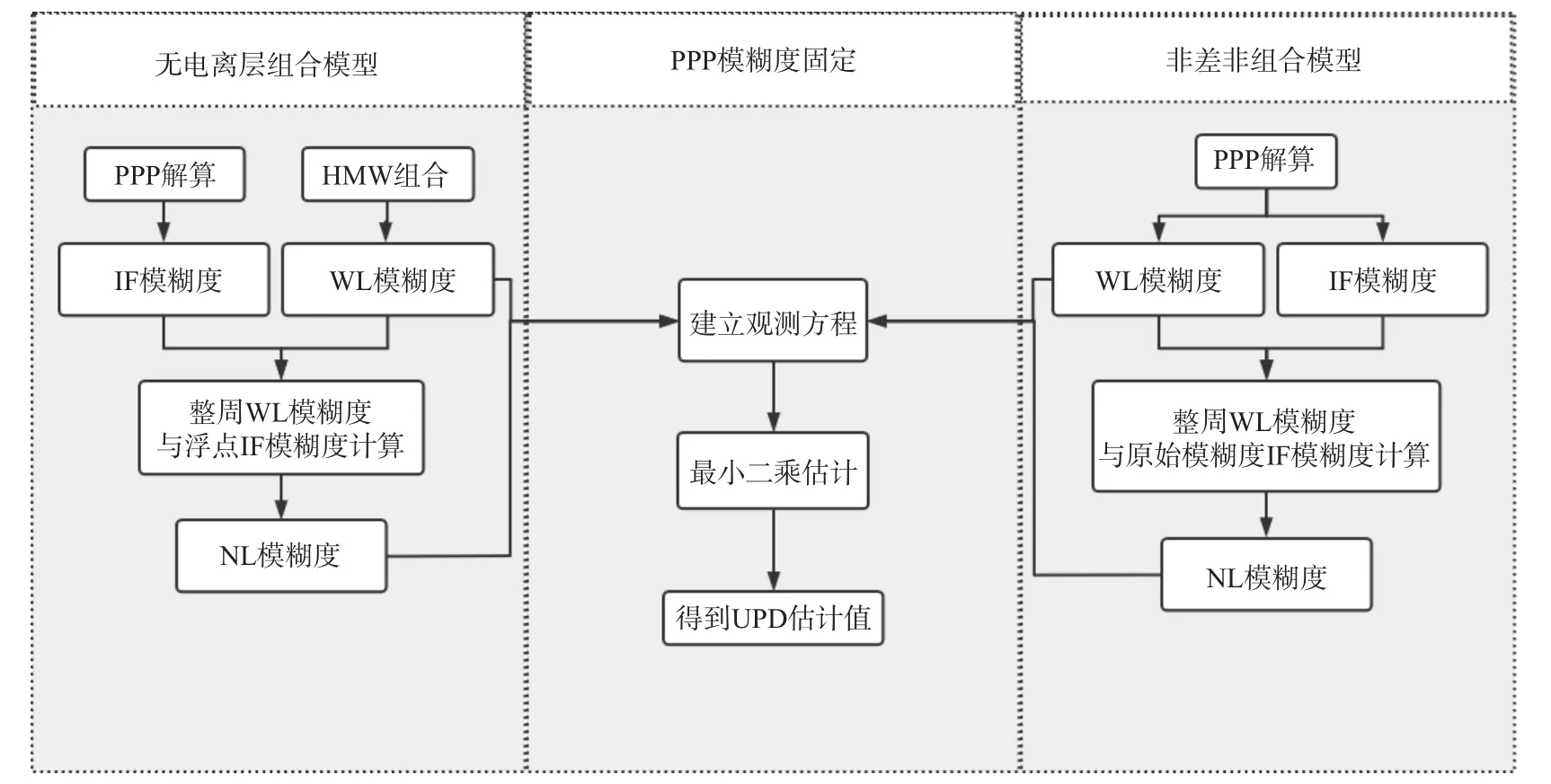
图1 UPD 流程图
值得注意的是,BDS-2 伪距观测值受到与高度角强相关的系统偏差影响.该偏差对采用伪距观测值的相位小数偏差估计产生较大影响.因此在进行BDS-2卫星UPD 估计时,需要首先改正BDS 伪距偏差,一般采用 Wanninger和Beer 的高度角模型消除IGSO/MEO 的伪距偏差[20],从而获取稳定的UPD 产品.此外,部分研究表明BDS-3 卫星基本不受该偏差的影响,因此BDS-3 卫星UPD 估计不需要对该偏差进行改正.
2 数据处理策略
本文选取了全球均匀分布的45 个IGS 测站在2021年年积日(DOY)第71—80 共 10 天的观测数据进行UPD 估计,所有测站均可以接收BDS-2 与BDS-3 卫星的信号,测站分布图如图2 所示.

图2 测站分布图
在非差非组合与IF PPP 解算中,采用了德国地学中心(GFZ)提供的精密轨道与钟差产品进行轨道钟差误差改正,对流层干延迟通过萨斯塔莫宁模型改正,湿延迟按照随机游走模式估计,非差非组合模型中电离层采用白噪声(WN)估计方法,其他的误差项如天线相位中心(APC)误差、固体潮、相对论效应均采用现有的模型进行改正.对观测值进行高度角定权,截止高度角设为7°.在UPD 估计过程中,选择可观测测到卫星数目最多的测站作为参考站,令其接收机端UPD 值为0,以此为基准解决UPD 估计中的秩亏问题.相应地,估计得到的卫星UPD 将包含该参考站基准的影响,即所有的卫星UPD 中包含了该基准站接收机的UPD 值.在采用两种PPP 模型进行UPD估计中,由于采用的基准可能不同,估计得到的全部卫星UPD 可能相差统一的数值,此时仍可以认为两类估计结果具有一致性.
3 BDS-3 UPD 估计结果及特性分析
3.1 BDS-2 与BDS-3 WL UPD 与NL UPD 估计结果
图3 展示了2021年3月12日(DOY 71)至2021年3月21日(DOY 80)10 天的WL UPD 估计结果;左边和右边子图分别为基于IF 模型与非差非组合模型的估计结果,上方和下方子图分别为BDS-2 与BDS-3 估计结果;分别随机选取了6 颗卫星作为研究对象,其中BDS-2 选取C06 作为参考星,BDS-3 选取C24 作为参考星.

图3 2021年3月12日至3月21日10日WL UPD估计结果
从实验结果可以看出,各卫星UPD 较为稳定,在10日内波动基本在0.1 周以内,由于HMW 组合观测值可以消除所有几何项的误差影响,并且BDS 卫星WL 的波长远大于硬件延迟、观测噪声等残余误差的影响,因此WL UPD 应较为稳定[21].由图3 可以明显地看出,不同模型估计得到的BDS-2卫星UPD 符合很好,大部分卫星UPD 之差小于0.05 周.而对于BDS-3 卫星,不同模型估计得到的UPD 结果没有展现明显的一致性.
为了进一步探究BDS-3 各类卫星之间偏差的一致性,分别选取不同卫星轨道类型和不同卫星生产厂家卫星作为基准星,估计了相应的UPD 结果.卫星生产厂家分别为中国空间技术研究院(CAST)与中国科学院微小卫星创新研究院(SECM).
图4 从上到下分别展示了选择C24(MEO-CAST)、C26(MEO-SECM)、C38(IGSO-SECM)得到10日WL UPD 序列.由图4 可知,与参考星相同生产厂家、相同轨道类型的卫星UPD 结果展现出一致性,与参考星不同生产厂家、不同轨道类型的卫星具有明显的不一致性.将在3.2 节对此问题深入分析.
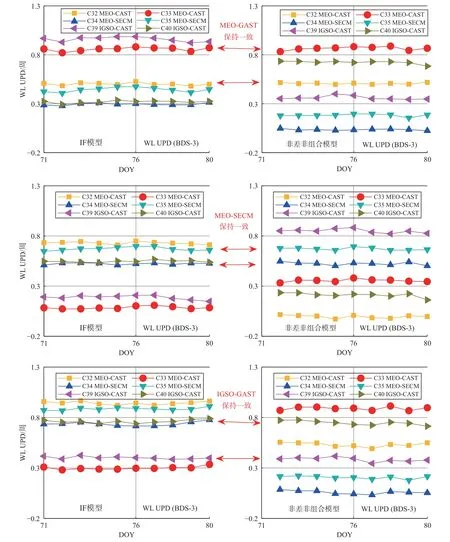
图4 基于不同参考星的BDS-3 WL UPD 估计结果
图5 分别给出了BDS-2 与BDS-3 DOY 72 的NL UPD 序列.上方和下方子图分别是基于IF 与非差非组合模型解算得到的UPD 结果,左边和右边分别是BDS-2和BDS-3 的估计结果;由图5可知,采用两种估计模型的NL UPD 在单日范围内保持稳定特性,平均标准差为0.063 3和0.059 9.与WL UPD 结果类似,采样两种模型估计的BDS-2 NL UPD 结果也符合得较好.
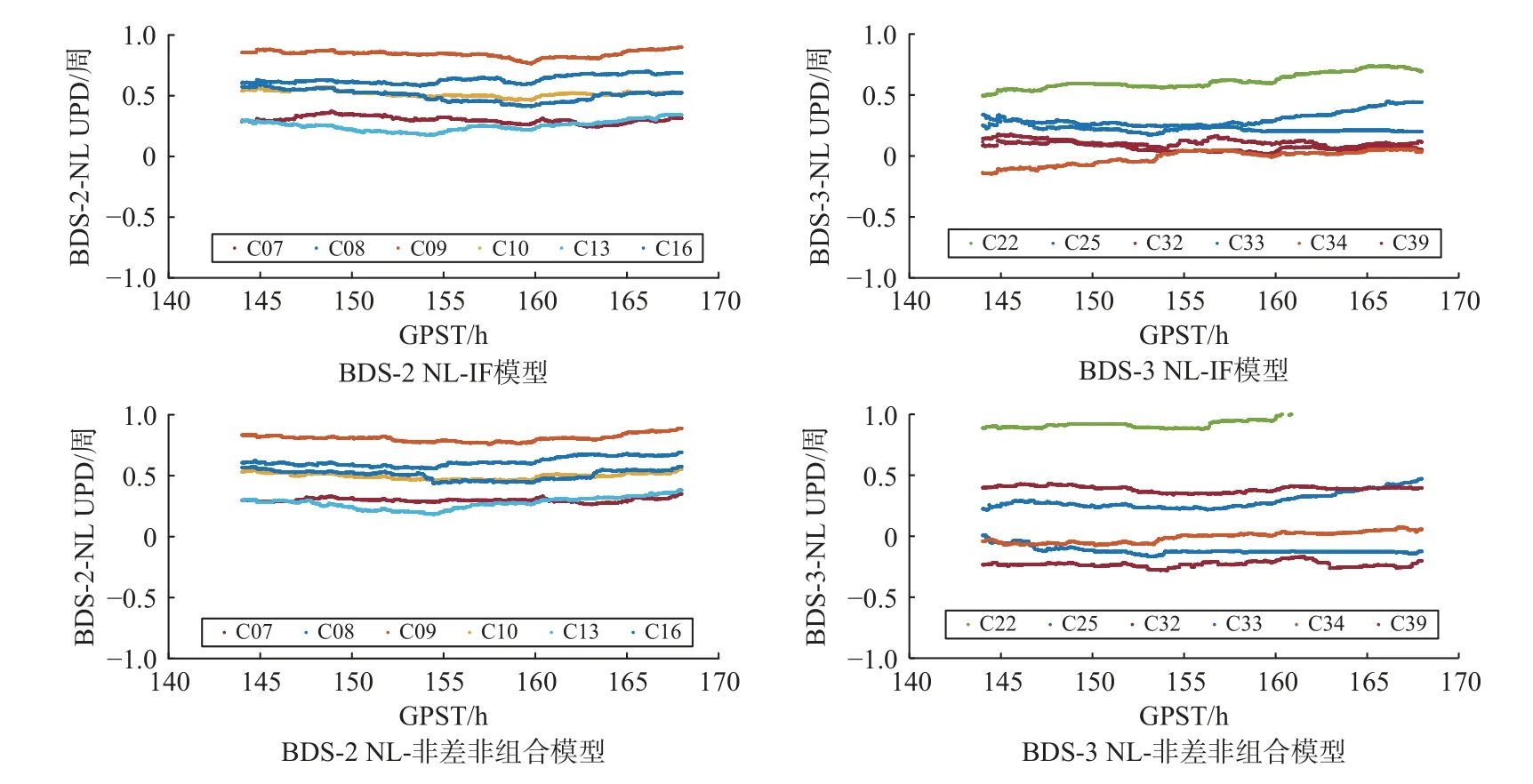
图5 单日NL UPD 估计结果
3.2 基于IF 组合与非差非组合的UPD 一致性分析
图6(a)与图6(b)分别展示了BDS-2 B1-B2 频率与B1-B3 频率双频的2021年3月12日(DOY 71)单日WL UPD 的无电离层组合与非差非组合估计结果差值.
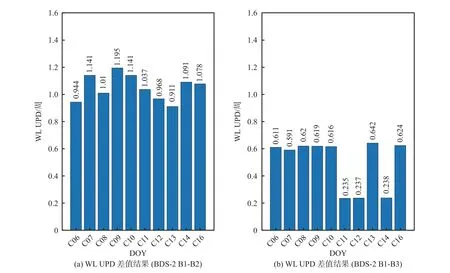
图6 BDS-2 两种频率求差结果
BDS-2 卫星均由CAST 研制,针对不同类型卫星,其差值基本保持一致,B1-B2 频率下不同卫星得差值基本保持在1 周左右,说明两种模型估计的UPD 结果并无明显的偏差;B1-B3 频率下IGSO 卫星差值均约在0.6 周,MEO 卫星差值均约在0.2 周,同类型卫星差值基本为同一定值,但IGSO 卫星与MEO 卫星UPD 结果有明显的不一致性.
图7 展示了BDS-3 B1-B3 频率在DOY 第71—80共10日WL UPD 的IF 与非差非组合估计差值结果的均值.不同卫星类型、不同生产厂家对应的卫星通过不同的颜色区分.目前BDS-3 的24 颗MEO 卫星中有14 颗卫星由CAST 研制,其余10 颗由SECM研制.根据本次的估计结果可以清楚地看到,对于CAST 厂家MEO 卫星WL IF 组合与非差非组合的差值均值都约在0.70 周;而SECM 厂家生产的卫星本次估计差值均值都约在0.97 周,可以发现即便卫星类型和频率相同,两个生产厂家的卫星存在系统偏差;同时,不同类型卫星之间也存在系统偏差,其中IGSO 而言差值约在在0.3 周,与MEO 之间也存在系统偏差.
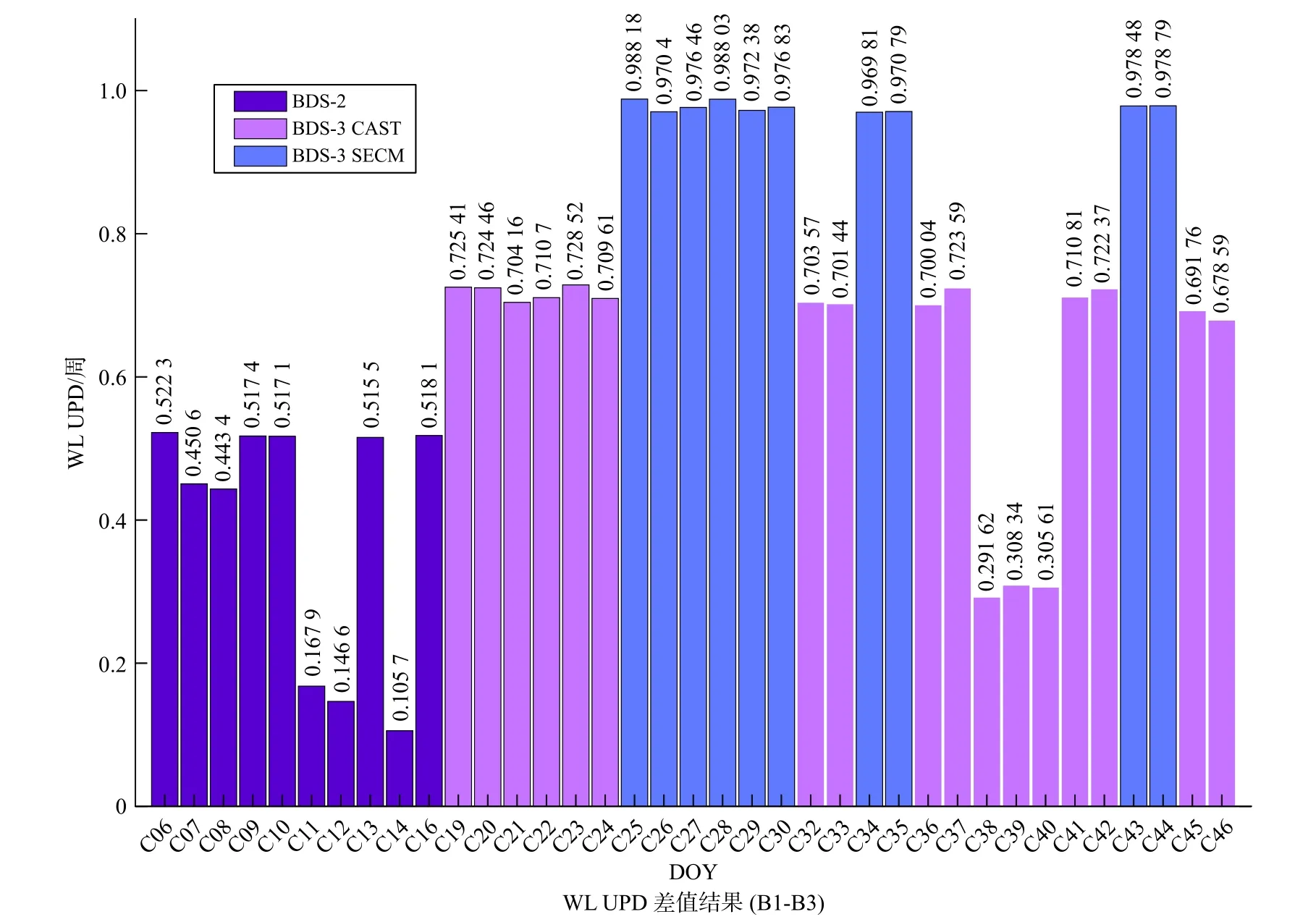
图7 2021年3月12日至3月21日10日BDS 卫星UPD 两种组合差 值均值
上述结果验证了BDS-2 卫星两种模型估计得到UPD 结果具有一致性,与理论推导结果一致.然而,对于BDS-3 卫星,不同模型估计得到的UPD 结果存在与卫星轨道类型以及生产厂家相关的特性.考虑该偏差由BDS-3 接收机端传导而来,不同轨道类型、不同生产厂家卫星对应的接收机端延迟可能存在偏离.在非差非组合模型中,对所有的BDS-3 卫星估计一个接收机钟差,假定该接收机钟差基准由CAST_MEO 卫星确定,其他卫星相对于CAST_MEO 卫星的系统偏差将被传导到模糊度参数中,具体表现为,如果SECM 卫星与CAST 卫星的接收机延迟存在系统偏差,该系统偏差会被传导到SECM 卫星上,所有的SECM 卫星模糊度中都会吸收相同的系统偏差(SECM-CAST).同理,如果CAST_IGSO 与CAST_MEO 卫星接收机延迟存在系统偏差,所有的CAST_IGSO 卫星也会吸收一个相同的偏差(CAST_IGSOCAST_MEO).而在UPD 估计过程中,同样仅估计一个接收机UPD 参数,该系统偏差与厂商、轨道类型相关的聚类特性同样反映在卫星UPD 的估计结果中,从而导致相同轨道类型或者相同生产厂家之间的卫星UPD 结果具有一致性,不同轨道类型、不同厂家之间的UPD 结果存在明显的系统偏差.
为了进一步验证BDS-3 不同厂商、不同轨道卫星之间是否存在系统偏差,以BDS-2 的IGSO 卫星钟差为参考,分别估计了BDS-3 MEO(CAST)、BDS-3 IGSO(CAST)与BDS-3 MEO(SECM)的系统间偏差(ISB).表1 展示了11 个IGS 测站(7 种接收机类型)估计得到的ISB 结果.可以看出,BDS-3 不同卫星生产厂家之间存在0.17~2.29 m的系统偏差,不同卫星类型之间存在0.10~1.56 m 的系统偏差,且同类接收机对应的系统偏差具有一致性,不同接收机类型对应的系统偏差并不一致.其中SEPT 系列接收机的系统偏差不显著,基本小于0.5 m,TRIMBLE ALLOY接收机的系统偏差最大,其数值接近2 m.因此,与推测结果一致,ISB 估计结果进一步证明了不同轨道类型、不同生产厂家卫星对应的接收机端延迟存在偏离.
上述ISB 结果进一步验证了BDS-3 不同厂商、不同轨道类型卫星对应的接收机端硬件延迟存在系统偏差.为了验证该偏差对于PPP 定位解算的影响,对11 个IGS 测站(具体信息如表1)DOY 第71—80的观测数据分别进行PPP 浮点解、顾及ISB 的浮点解以及固定解研究.图8 分别展示了全部测站BDS-3以及BDS-3+BDS-2 定位解算的平均定位误差序列,其中绿色、蓝色与红色线条分别代表PPP 浮点解、顾及ISB 的PPP 浮点解与PPP 固定解.如图8 所示,相较于传统的PPP 浮点解,考虑不同厂商、不同轨道类型卫星之间的系统偏差后,单BDS-3 定位误差序列无明显改进,这可能是由于大部分接收机类型对应的系统间偏差量级较小的原因,且单BDS-3 可观测的卫星数较少,增加更多的待估参数可能会降低解的强度.与之相对,BDS-2+BDS-3 解算后,考虑BDS-2 与BDS-3 系统偏差以及不同厂商、不同轨道类型卫星的系统偏差后,定位误差的收敛速度明显加快.因此,针对目前BDS-3 PPP 数据处理中可以忽略不同厂商与轨道类型卫星之间的系统偏差,BDS-2 与BDS-3融合处理时建议精确顾及BDS-2 与BDS-3、不同厂商、不同轨道类型卫星的系统偏差.

表1 BDS-3 不同厂商、不同轨道类型卫星ISB 估值与差值统计 m

图8 BDS-3(左图)与BDS-2+BDS-3(右图)PPP 平均定位误差序列
此外,相对于浮点解,模糊度固定后,定位精度的改善十分明显,BDS-3 PPP 1 h 定位精度由0.046 m,0.016 m,0.029 m,改进到0.026 m,0.015 m,0.020 m,在东(E)、北(N)、天顶(U)方向分别改进了43.1%、6.2%、31.0%.值得注意的是,本文所采用的UPD 产品并未顾及各项系统偏差的影响.尽管如此,仍可以获得理想的固定解效果.
4 结论与展望
本文首先说明BDS UPD 估计在PPP 中的重要性,简述PPP 函数模型中使用最为广泛的IF 模型和非差非组合模型,并从理论上推导证明了两种模型在采用相同处理策略下UPD 估计的一致性.之后基于全球均匀分布的45 个IGS 测站观测数据对两种PPP 模型的BDS-3 UPD 产品绘图,分别绘制了DOY第71—80 的10日WL UPD 序列图和DOY 72 的单日NL UPD 序列图,并对两种组合作差,绘制差值结果.
根据WL和NL 巷UPD 序列图从UPD 产品的时间稳定性出发进行分析,发现IF 模型和非差非组合模型10日WL UPD 的平均标准差为0.060 7和0.1363,单日NLUPD平均标准差为0.0633与0.0599,WLUPD波动小于0.1周,就序列来看均较为平稳,BDS-3WL与NL UPD 均保持较高稳定性.
从两种组合的一致性出发,发现BDS-2 的两种组合UPD 产品保持较高一致,而BDS-3 无法看出较为明显的一致性,对数据分析发现相同卫星轨道类型和生产厂家的卫星UPD 产品可保持一致,而不同卫星轨道类型或不同生产厂家的卫星之间存在0.5周左右的差异.推测BDS-3 不同轨道类型、不同生产厂家生产的卫星对应的接收机端硬件延迟存在系统性偏差.通过估计不同卫星生产厂家、卫星轨道类型的ISB 进行验证该结论,结果表明BDS-3 不同卫星生产厂家之间存在0.17~2.29 m 的系统偏差,不同卫星类型之间存在0.1~1.56 m 的系统偏差.同时,探讨了该偏差对于PPP 解算与模糊度固定的影响.未来,将进一步考虑建立针对不同接收机类型的偏差校正模型,在精确考虑该系统偏差的前提下,提升UPD 产品的精度与模糊度固定性能.
