高度角与信噪比混合的GNSS 随机模型精化及其对RTK 定位性能的影响
2023-03-23蔡亲青朱锋陈曦马立烨
蔡亲青,朱锋,2,陈曦,马立烨
(1.武汉大学 测绘学院,武汉 430079;2.武汉大学 地球空间环境与大地测量教育部重点实验室,武汉 430079)
0 引言
全球卫星导航系统(GNSS)能够提供全天候、高精度的位置基准,是重要的时空信息基础设施.现阶段已建成GPS、GLONASS、Galileo和北斗卫星导航系统(BDS)四大全球导航系统以及其他区域系统和增强系统,提供了超过一百余颗在轨导航卫星,使用户能获得丰富的卫星导航信息以满足定位精度、可靠性及完好性的需要[1-2].多频多系统能有效解决单一系统可见卫星数目不足的情况,然而不同系统、不同频段的观测值精度存在差异;若在定位解算时,未构建一个合理的随机模型,会对多频多系统定位精度造成严重影响.
GNSS 随机模型涉及到观测值本身的精度、系统动态变化以及参数的随机特性等[3],通常通过一个合理的协方差矩阵来表示.随机模型的建立和精化是高精度定位解算中一个重要的环节,随机模型对模糊度固定的成功率和可靠性以及最终的定位精度存在一定的影响[4-5].现有的随机模型有等权模型、高度角模型及信噪比(SNR)模型.等权模型算法最为简单,但不同卫星、不同测站、不同历元受到误差的影响并不相同,所以等权模型合理性较差.高度角模型不依赖其他信息且高度角和大气延迟存在密切关系,已被许多科研和商业软件所采用.SNR 是指接收机解调卫星信号时,载波信号与噪声的能量密度比,能很好地体现观测值的噪声水平.
然而,单一指标的高度角或SNR 随机模型难以满足全场景的高精度定位导航,高度角模型能有效地削弱大气残余误差,但对于衍射误差的削弱效果不明显;SNR 模型可以很好地消除衍射误差的影响,但对大气误差敏感度不及高度角模型[6],目前已有学者尝试将高度角和SNR 信息混合构建随机模型;文献[7]将高度角信息作为一个膨胀因子加入SNR 模型得到高度角SNR 联合模型;文献[8]等针对实际测量中存在卫星高度角高多路径噪声较大、卫星SNR 较大而高度角较小的异常情况,提出了高度角与信号强度联合的随机模型;文献[9]等基于主成分分析法(PCA)确定SNR和高度角在测量噪声中的贡献率,通过加权融合建立高度角SNR 随机模型.上述研究未针对目前多频多系统GNSS 的状况进行模型参数的适配,且随机模型的构建和测试工作不是针对特定型号接收机进行展开,对于移动测量、变形监测等这类高精度定位领域而言,通用的随机模型处理得到的最终结果往往不是最优解;而通过特定型号接收机建立大规模观测数据库,利用云计算和大数据技术能够实现随机模型精细化处理,从而提升GNSS 高精度定位的可用性及可靠性.基于上述分析,本文使用特定的接收机数据对随机模型进行精细化处理与分析:在提取多频多系统伪距、相位噪声的基础上,利用三维函数拟合精化高度角SNR 混合模型,并在丰富场景的动态实验下验证该模型定权的准确性.
1 GNSS 观测值噪声提取
1.1 站间单差提取伪距噪声
以短基线为例,综合考虑卫星信号从生成、到传播,再到被捕获的过程中,出现的各种误差,可将伪距和载波相位原始观测值表示为[10]
式中:ρi为卫星到接收机的几何距离;和dti分别为卫星钟差和接收机钟差;Ii和Ti为电离层和对流层误差;λ为载波的波长;Ni为载波的模糊度,以周作为单位;εPi,εφi分别表示伪距和观测噪声.
对于伪距的噪声可以通过站间单差来提取,A、B两测站间进行站间单差,可以消除卫星端钟差、卫星端初始相位小数偏差等与卫星端相关的误差.站间单差观测值为
站间单差观测值中,包含A、B两站的基线长度,电离层和对流层误差残余,站间单差的接收机误差、接收机端的硬件延迟以及站间单差的伪距噪声.通过代入高精度的A、B测站的位置信息可以计算基线长度,在短基线(SBL)的情况下,电离层、对流层误差可以认为被完全消除.接收机钟差可以通过参数估计的方法进行消除,较为简单的方法则通过对某一系统某一频点的残差进行排序取中位数,该中位数可当作该系统该频点的接收机钟差,扣除接收机钟差后,得到的残差即可认为是站间单差的伪距噪声.对于伪距噪声,可通过固定探测阈值或 3 σ原则进行粗差检测.
本实验的流动站、基准站采用同一款接收机,两站伪距噪声可以认为独立同分布,于是根据误差传播定律可得
式中:σrove为流动站伪距噪声大小;σrove,base为伪距站间单差的噪声大小.
1.2 历元间三次差提取相位噪声
相位噪声的提取和伪距噪声提取存在差异,相位测量值中包含模糊度参数,通过站间单差只能消除卫星端的误差和具有空间相关性的大气误差,无法消除模糊度参数,而模糊度参数估计过为复杂,并且正确估计出全部卫星的模糊度就更具挑战性了.本文通过历元间三次差来提取相位噪声[11-12].
因为卫星钟差、卫星端初始相位小数偏差等与卫星端相关的误差较为稳定,短时间内可认为卫星端的误差为常数项,同时短时间内电离层和对流层的变化较为缓慢,在采样率较高的情况下,历元间单差也能够很好地消除上述误差;但在采样率低的情况下,历元间单差的效果往往不理想,而通过历元间三次差能够有效解决低频情况下历元间单差对上述误差削弱效果差的问题.历元间三差观测值为
历元间三差观测值中,卫地距的三次差ΔΔΔρ可以通过高精度的参考坐标(静态数据无需参考坐标)和卫星坐标(卫星精密星历)计算得到;电离层、对流层误差在历元间三差的情况下可以被认为完全消除;通过历元间三次差,接收机钟差的常数项、一阶项及二阶项得到了消除,为了进一步消去接收机钟差的影响,此处也采用参数估计的方法消去接收机钟差的影响;如果不发生周跳,则认为同一颗卫星的模糊度是一个常数,即ΔΔΔN为0,但实际情况肯定存在着发生周跳的情况,历元间三次差观测值扣去接收机钟差、位移大小得到的残差,该残差接近于0,如果出现该残差的大小大于半个波长的情况,即认为发生了周跳,将此数据剔除即可.相位观测值大多数的粗差可能会被当作周跳进行剔除,为了防止小粗差,采用3σ原则进行粗差检测.
不失一般性,通常认为各个历元的载波观测值是独立不相关的,其方差相同,根据误差传播定律有
式中:σψ表示相位历元间三差的噪声大小;σφ为单个历元相位噪声大小.
可得相位噪声大小
2 随机模型精细化处理
2.1 随机模型
2.1.1 基于高度角的随机模型
基于高度角的随机模型是通过高度角E来描述观测值噪声水平的函数.通常认为卫星高度角越大,观测值受大气误差、多路径效应影响越小.目前应用较为广泛的高度角定权函数有三角函数、分段函数等.如GAMIT 则采用正弦函数模型[13],本文也采用该定权模型
传统的经验模型会根据信号的噪声水平,将a、b皆取值为信号波长(或者码宽度)的1%.
PANDA 软件采用分段函数进行高度角定权[14-15],其定权策略为
2.1.2 基于SNR 的随机模型
GNSS 信号功率是对其质量的一种评估指标,大多数接收机评估GNSS 信号的指标有SNR和载噪比(CNR).二者在实际使用中极易混淆,所以在此进行区分.SNR 是接收机输出端的载波信号与噪声的能量密度比,CNR 是指接收机输入端的载波信号与噪声的能量密度比.SNR、CNR 存在如下关系[16]:
式中,GP表示接收机处理增益.由此可见,SNR 不仅与CNR 相关,而且与接收机处理信号的方式相关.因为CNR 与带宽相关,因此通常情况下,把1 Hz带宽上的载噪比(C/N0)作为SNR 观测值,单位为dB/Hz.
SNR 从信号功率方面很好地反映了信号质量,Brunner等[17]基于SNR 建立了载波相位观测值的Sigma-ε定权模型,本文的SNR模型使用该模型
式中,Ci为常数项,该值与接收机的相位跟踪环带宽有关,不同系统不同频点的值不一样.Brunner 给出Ci的经验值为C1=0.002 24 m2Hz,C2=0.000 77 m2HzC1=0.002 24 m2Hz.
上述定权模型针对不同系统不同频点,Ci的拟合需要大量数据,实际操作较为复杂,文献[7]、[18]等使用了一种改进的SNR 定权模型
式中,a、b为待拟合的经验参数.
2.1.3 高度角、SNR 混合随机模型
高度角体现了接收机和卫星的空间关系,并不能完全表征信号传播过程发生的遮挡、反射等异常情况以及接收机捕获信号的质量.在开阔环境下,发生信号遮挡较少同时多路径效应不明显,此时观测值的误差绝大多数是来自大气误差,高度角越高,所受的大气误差影响越小,此时可以认为信号质量好.但实际导航观测环境复杂多变,特别是在城市导航中,发生信号遮挡、衍射的概率极高,此时仅仅通过高度角进行定权准确性会大大降低.当信号发生衍射时,SNR 值发生明显地衰减,但电离层、对流层延迟导致信号传播距离增长,给SNR 带来的衰减极小,所以SNR 能很好地通过表征信号反映传播过程中发生的遮挡、反射等异常情况,但对于大气误差较不敏感.在实际观测情况下,也容易发现高高度角低SNR、低高度角高SNR 的情况.单一的评估指标难以应对复杂的观测环境,通过上述分析,高度角和SNR 模型存在一定的互补关系,通过融合高度角、SNR 测量值的随机模型更为可靠、鲁棒性更强.因此,本文提出了一种高度角、SNR 混合的随机模型,简称混合模型
式中,wSNR、aSNR、bSNR、wEL、aEL、bEL为待拟合的经验参数.
2.2 多频多系统随机模型精化
多频多系统的随机模型的主要内容有观测值的噪声水平、伪距与载波相位噪声比以及卫星系统间/频率间观测值噪声比的确定[4].本节通过函数拟合确定测量值的噪声水平;通过对伪距、相位噪声单独进行拟合,间接确定伪距与载波相位噪声比;通过对多频多系统观测数据噪声进行拟合,间接确定卫星系统间/频率间观测值噪声比.
本节超短基线实验数据采集于武汉大学测绘学院大楼楼顶,数据时长为3 天,视野较为开阔,测站周围环境如图1 所示.流动站和基准站皆采用Trimble Alloy 接收机,采样间隔为5 s,卫星截止高度角设为10°.
图1 测站周围环境示意图
拟合前,需对SNR和高度角分别以0.25 dB/Hz和1°为间隔对噪声进行统计计算,通过下述两种方法进行三维函数拟合:
1)对式(13)中的所有参数进行拟合;
2)先对高度角和SNR 模型进行拟合,得到aSNR、bSNR、aEL、bEL后,随后通过三维函数拟合得到wSNR、wEL.
经过实验发现第一种方法容易拟合失败或者拟合的曲线合理性较差,如图2 所示,方法一拟合时,会出现拟合的误差偏大、误差主要与单一指标信息相关,而与另一指标信息相关性小等情况.因此本文采用第二种方法进行拟合,以GPS L1C/A 信号为例,详细描述随机模型拟合过程.
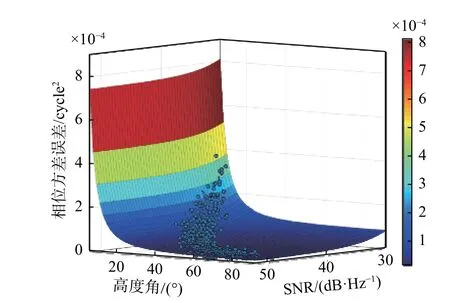
图2 方法一拟合失败示例图
首先对高度角、SNR 随机模型进行拟合,拟合效果如图3 所示,表1 给出高度角、SNR 拟合参数.
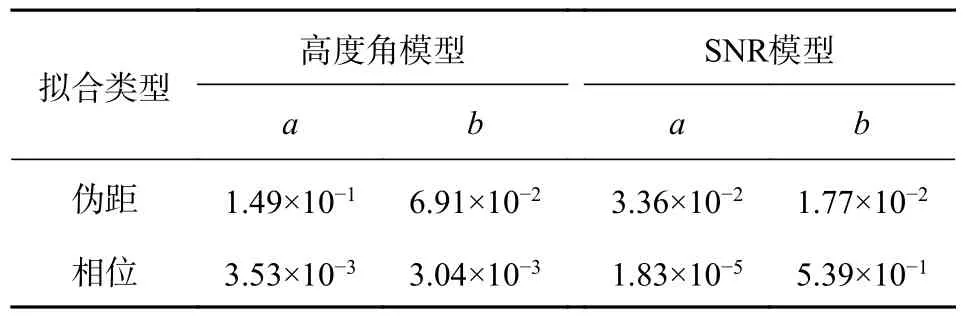
表1 高度角、SNR 拟合参数
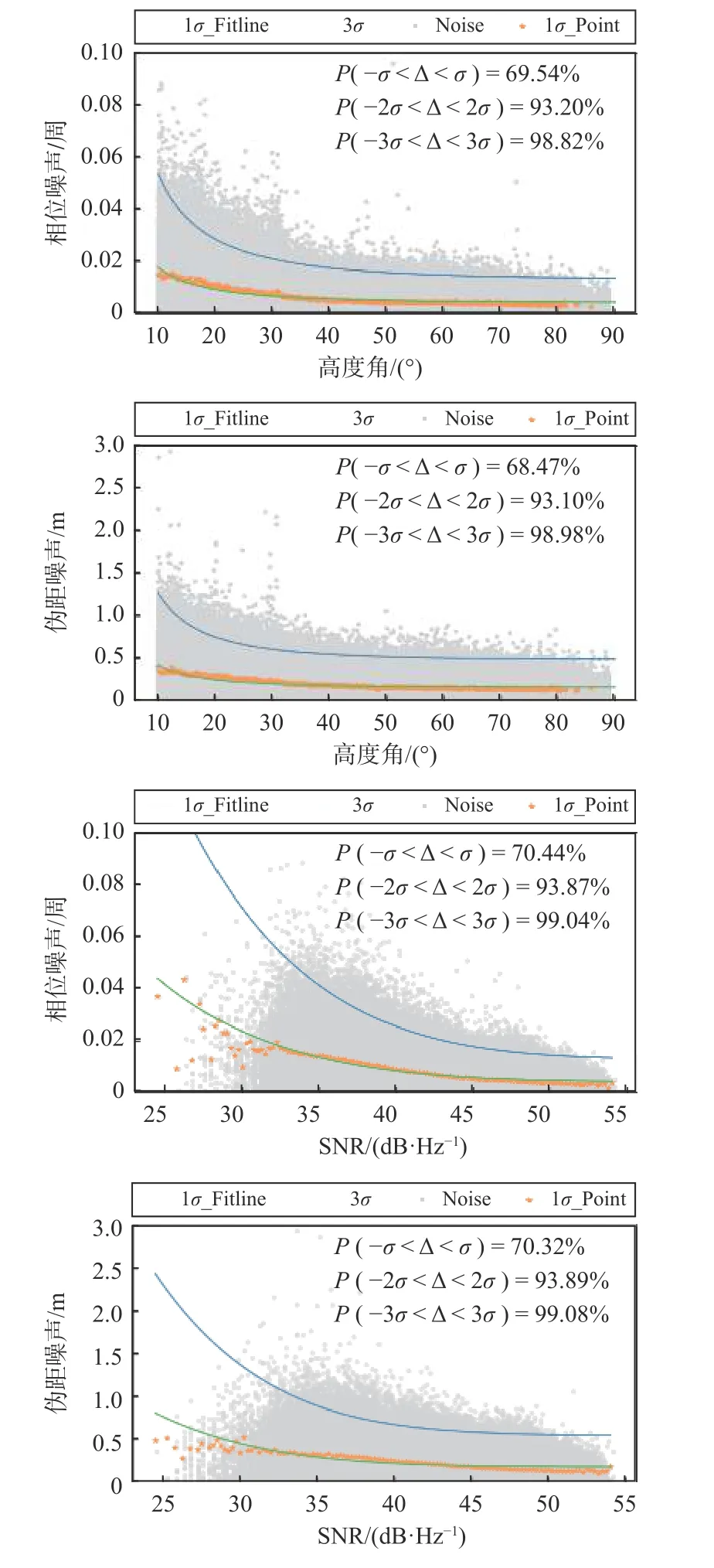
图3 高度角、SNR 模型函数拟合图
随后使用三维函数拟合工具箱对高度角SNR 混合随机模型进行拟合,拟合效果如图4 所示.

图4 混合模型三维函数拟合图
表2 给出混合模型拟合参数及统计残差的 σ、2 σ、3σ的占比.
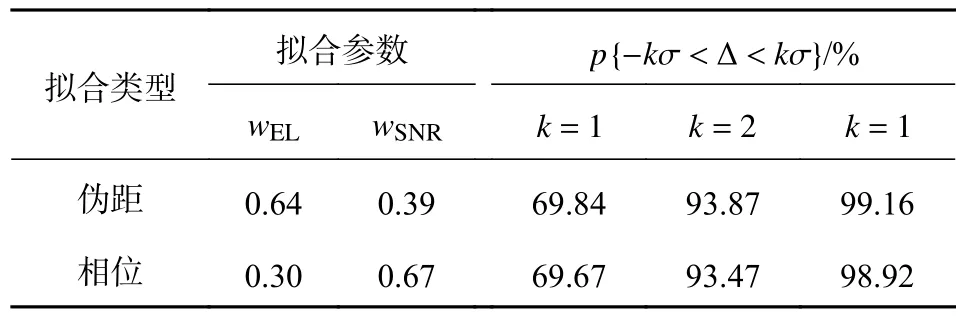
表2 混合模型拟合参数及误差分布统计表
三个模型的 3 σ占比率较为接近,但混合模型融合了高度角和SNR 的信息.当SNR 较小、高度角较大时,混合模型最终评定的方差也是较大,能有效地抑制异常情况对定位结果的影响.同时通过函数拟合可以看出,在不同高度或不同SNR 下,伪距与相位噪声比值不是一个常数项,传统随机模型会将伪距与相位噪声比固定,会导致部分观测值精度虚高或虚低的假象,从而影响最终定位精度.本文不固定伪距与相位噪声比,而是将伪距和相位噪声单独进行拟合.
基于上述拟合过程,本文继续对GPS L2P(通过Z 跟踪技术进行捕获)、Galileo 的E1和E5a 以北斗二号(BDS-2)/北斗三号(BDS-3)的B1I和B3I 的随机模型进行拟合,其中表3 详细地给出GPS/Galileo/BDS-2/BDS-3 的混合模型最终拟合参数及误差分布情况.

表3 GPS/Galileo/BDS-2/BDS-3 混合模型拟合参数及误差分布情况
通过拟合函数来看,卫星系统间/频率间观测值噪声比值在不同SNR 或不同高度角下是不同的;因此本文混合随机模型不固定伪距相位噪声比和卫星系统间/频率间观测值噪声比,而是给出每个卫星系统每个频段的伪距和相位的随机模型函数.
3 随机模型验证与性能评估
本章选取了1 组动态数据对高度角随机模型、SNR 随机模型和高度角、SNR 混合随机模型性能进行评估.数据采集于2020年11月07日武汉市光谷科技城,观测时长为6 000 s,流动站接收机采样频率为1 Hz.由图5 可知,该数据场景信息较为丰富,既有比较开阔的郊区场景,也有高楼林立、容易发生遮挡的城市复杂场景.
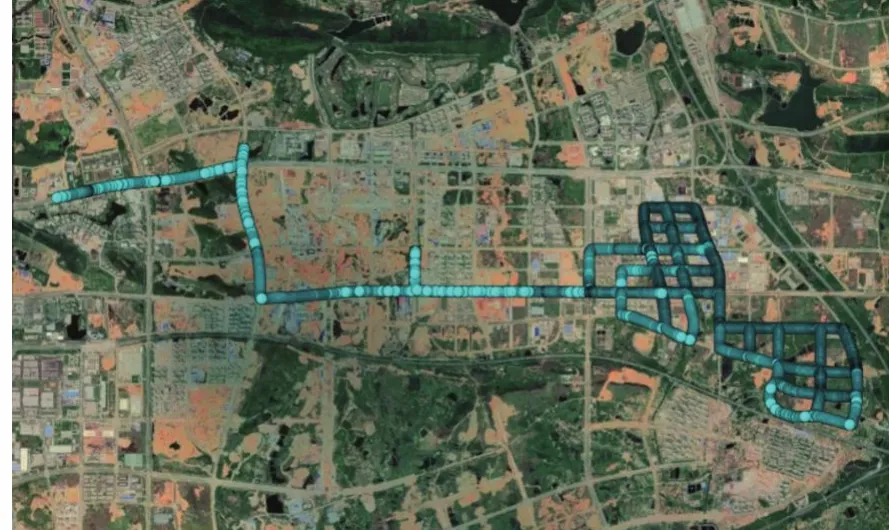
图5 实测数据轨迹图
流动站基准站皆采用Trimble Alloy 接收机,两站距离小于20 km.车上同时搭载一台惯导器件NovAtel SPAN(FSAS),通过商业软件Inertial Explorer 8.7 进行事后双向GNSS/INS 紧组合平滑处理,最终通过归算杆臂值得到流动站的参考坐标(GNSS 接收机相位中心).表4 给出了软件解算策略.
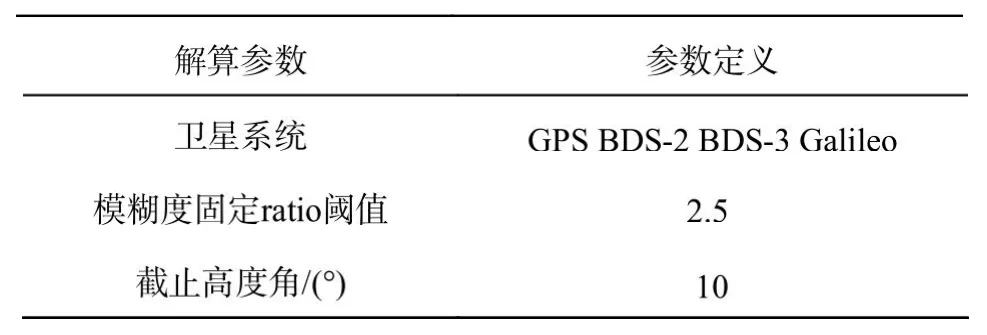
表4 解算配置表
首先,三种随机模型采用上述的策略进行实时动态(RTK)解算,将其解算结果与参考轨迹进行比较,并绘制误差序列图.
由图6 可得,基于SNR 模型的解算结果最差,高度角模型较好,混合模型解算结果最优.统计高度角、SNR、混合模型水平误差RMS 分别为8.9 cm、3.6 cm、1.8 cm,高程误差RMS 分别为17.6 cm、6.2 cm、3.9 cm.混合模型相比于高度角模型,水平方向上定位精度提升约为50.0%,高程方向精度提升为37.1%.通过时序图可以看出,开始和结束时段误差较大、跳变点多;中间时段的误差小、轨迹接近参考轨迹.开始和结束时段是位于高楼遮挡的城市环境,该时段容易发现信号遮挡、多路径效应,该环境对随机模型定权准确性是一个极大的考验.在开始时段,SNR 模型中的跳点频发,且在零值附近的误差波动大;高度角模型在零值附近的误差波动小,但跳点情况也很频繁;混合模型的定位误差波动小,且跳点抑制情况好.在结束时段,三者误差序列波动较小,高度角模型跳点情况最为频繁,SNR和混合模型对跳点的抑制情况较好.从定位精度来看,在城市复杂场景下,混合模型比单一SNR、高度角模型定权更加准确.
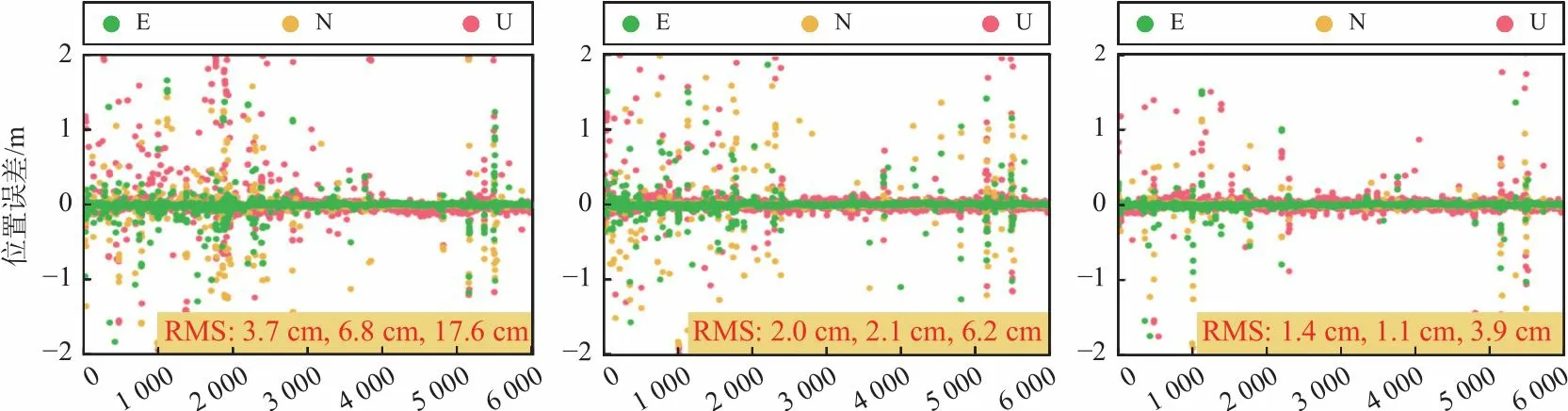
图6 E、N、U 误差序列图(从左到右依次为SNR、高度角、混合模型)
随机模型定权对模糊度解算的可靠性和成功率存在很大的影响,而模糊度能否正确固定直接决定了定位结果的好坏,因此本文进一步分析随机模型对模糊度固定性能的影响.定位解算中浮点解精度由选择的定位函数模型和随机模型共同决定[19],在定位函数相同的情况下,随机模型是影响浮点解精度的主要因素;若模型赋予观测值的权重不合理,浮点解精度较差,模糊度搜索空间增大,容易导致模糊度无法固定.本文采用部分模糊度固定方法,通过比较模糊度固定的卫星数可在一定程度上反映模糊度固定的性能,进而反映随机模型的准确性.图7 给出了三种随机模型中模糊度固定的卫星数,混合模型的模糊度固定的卫星数明显大于SNR和高度角模型的固定卫星数,SNR 模型的固定卫星数目最少.对整个时段进行统计,SNR 模型、高度角模型、高度角SNR 混合模型模糊度固定的平均卫星数目分别为19.29、20.82、22.26 颗.
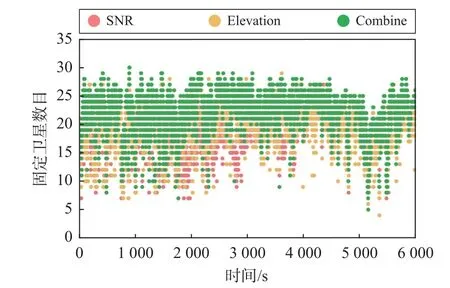
图7 模糊度固定的卫星数序列
但如果定权过于乐观,观测值精度虚高,也会导致模糊度错误固定.下面对三个模型的模糊度固定率进行分析,并比较模糊度正确固定率,本文模糊度固定正确的评判标准为相比于参考坐标,水平误差小于10 cm,高程误差小于15 cm.
由图8 可知,SNR 模型、高度角模型、混合模型的模糊度固定率依次提升,但三者的模糊度固定率差距较小,混合模型相对于SNR 模型仅提升1.78%.而此处更加关注的是三个模型的模糊度正确固定率,混合随机模型的模糊度正确固定率,相较于SNR 模型、高度角模型,分别提升了5.27%和1.84%.通过计算可得,混合模型的模糊度错误固定率(模糊度固定率减去模糊度正确固定率)仅为1.68%,是三者中最小的,说明混合模型出现观测值虚高的情况少于SNR和高度角模型,能够更好地反映观测值误差的真实分布,从而验证了混合模型定权准确性高于单一高度角、SNR 模型.
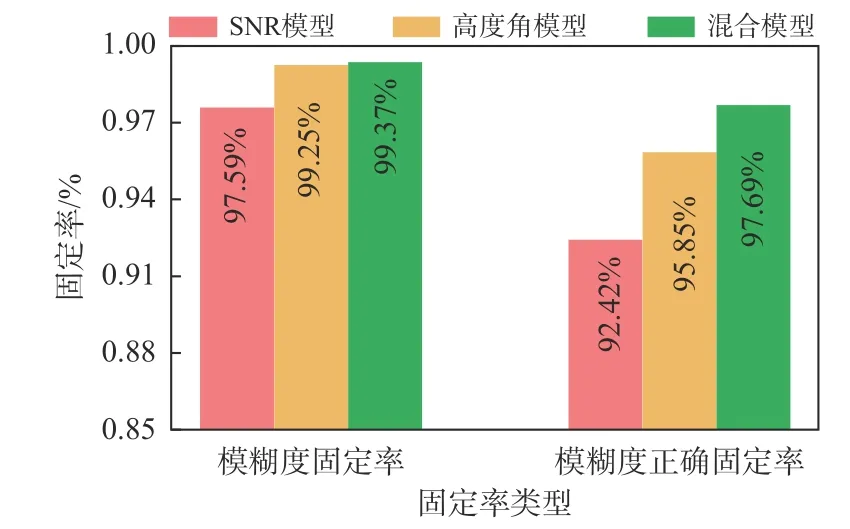
图8 模糊度固定情况对比
4 结束语
本文通过站间单差、历元间三次差来提取GPS/BDS/Galileo 的伪距、相位噪声,利用三维函数拟合精化高度角、SNR 混合模型.得出如下结论:
1)对拟合得到的随机模型函数分析可得,不同SNR 或不同高度角下,伪距相位噪声比、系统间/频率间噪声比值不是固定的,固定这些比值会导致部分观测值精度虚高或虚低的假象,偏离真实误差分布.
2)在动态实测数据中,通过平均固定卫星数目、模糊度固定率、定位性能来反映混合模型定权准确性高于SNR、高度角模型.混合随机模型的模糊度正确固定率,相较于SNR 模型、高度角模型,分别提升了5.27%和1.84%.SNR 模型定位精度低于高度角和混合模型,混合模型相比于高度角模型,混合模型相比于高度角模型,水平方向上定位精度提升约为50.0%,高程方向精度提升为37.1%.
本文通过先验信息(高度角、SNR)对观测值进行定权,未来可以更进一步融入卫星的几何分布状态和卫星数目进行定权以及验后通过方差分量估计[20]来动态调整观测值权重.
