面向武器站模块化基座的多工况与静动态筋壁结构高效设计方法
2023-03-21万子平谭若愚郑杰基任广安谢馨范大鹏
万子平, 谭若愚, 郑杰基, 任广安, 谢馨, 范大鹏
(国防科技大学 智能科学学院, 湖南 长沙 410073)
0 引言
武器站是一种基于两轴转台(方位轴和俯仰轴)的精密指向系统,该系统可在控制闭环下使武器的火线轴稳定地跟随目标。随着战场需求的不断变化,武器站在效能单元(武器、传感器等)的配置上更加注重可重构设计,以便于根据需求快速配置,缩短产品设计定型时间。2017年,美国MOOG公司推出了Reconfigurable Integrated-weapons Platform可重构集成武器平台,简称RIwP。该平台对机械、传动和驱控组件均进行了通用化设计,将产品设计定型流程(数月至数年)转变为效能单元的换装流程(小于1 h),缩减了产品定型时间,增强了武器站的战场适应性。
可重构设计的优势主要体现在通用性、重组性、扩展性、低成本、容错性和自修复性,但存在结构冗余的问题,导致其机械特性在可重构设计中非最优,从而影响武器站快、准、稳的伺服性能。
机械特性的优化方向主要包括结构、材料和工艺。工程应用中,材料优化方法主要为选型设计,工艺优化方法主要为校核验证,这两个优化方向在机械特性优化中的作用相对有限,而结构优化则可以实现机械特性优化的最大延展。
结构优化设计主要包括基于局部结构参数化的尺寸优化[1]、基于全局外形参数化的形状优化[2]和基于保留承力路径的拓扑优化[3-4]。上述优化方法的焦点多为对优化行为的描述,而较少关注机械结构与应用背景的关系。针对此问题,又衍生出了多材料结构的多学科优化方法[5]、复杂工况下的多工况优化方法[6]、连续结构的筋壁结构优化方法[7]和离散结构的骨架化优化方法[8]。由于武器站机械结构特征为承力腔体结构,需要其具有承压和密封特性,最适宜设计为筋壁结构形式。筋壁结构为高刚质比结构,兼顾了轻量化、高刚性、固有频率高和稳定性高等优势。
近期筋壁结构的优化研究包括:1)多层级并发加筋方法[9],该方法采用拓扑优化方法获得承力筋条,采用基结构法进行局部结构加强,此类方法较适用于受力均匀的航天器结构,不太适合工艺相对复杂的武器站结构;2)生长式的筋结构成型方法[10],此类方法基于工艺方法实现筋的柔性阵列生长,多用于冲压或轧制工艺下的板料加筋方法,不太适合武器站类铸造结构;3)复合材料协同加筋方法[11],此类方法基于复合材料特性进行多目标下的筋壁结构设计,因为该方法中加入了阻尼板,丰富了其动态特性,但对于铸铝材料的武器站不太适合。综上所述可见,依据武器站的应用背景、载荷工况和指标要求合理地设定设计目标,设计方法和优化策略尤为重要。
基于上述问题,本文基于综合目标优化函数提出了一种多工况与静动态的筋壁结构高效设计方法。该方法包括两个方面:1)基于超单元的多工况与静动态拓扑优化方法,解决拓扑优化计算消耗大的问题;2)基于灵敏度的筋壁结构响应面寻优方法,解决拓扑构型外形包络高效成型的问题。
1 模块化基座的综合目标优化函数
1.1 模块化基座的多工况优化函数
1.1.1 模块化基座可重构特性
模块化基座源于武器站U形架的碎片化,其之所以可以单独成为模块化部件,是因为可通过模块化关联度计算[12]模块化基座与方位传动轴系和俯仰传动轴系的关联度相等。
美国MOOG公司推出的RIwP可重构集成武器平台如图1所示。由图1可知,耳轴支架和耳轴调节支架需要有一定的调节特性,而国内未系列化的多变武器负载提高了耳轴支架和耳轴调节支架的设计难度;反之,模块化基座不存在上述问题,能完成一对多的可重构设计。

图1 RIwP可重构集成武器平台Fig.1 RIwP Reconfigurable Integrated-weapons Platform
1.1.2 基于功能区和射角的工况分类
构型的通用性越强,面临的工况越多。根据武器站的外部输入扰动可知,武器后坐力载荷是造成不同工况的主要来源,因此可通过武器布局和高低射角对工况进行分类。假设武器站典型功能区有ng个,武器站典型射角有ns个,则共可以分为ng×ns种工况,武器站工况分类如图2所示。
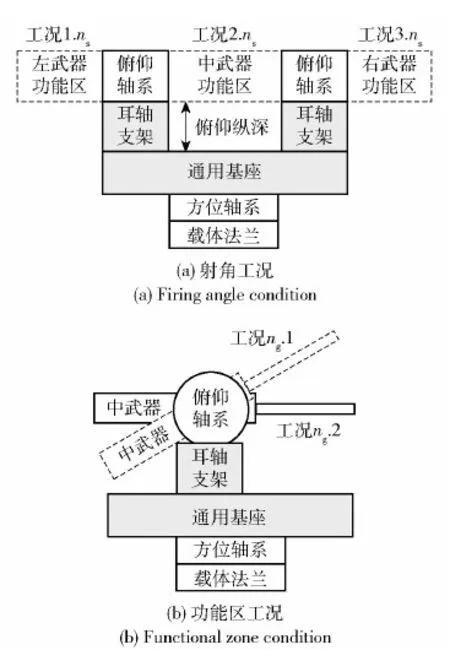
图2 武器站工况定义示意图Fig.2 Schematic diagram of condition definition of weapon station
1.1.3 多工况优化函数建立
在未设定具体优化目标的基础上,与后坐力载荷相关的单工况目标函数为
Ωn=Ω(Fn),n∈{1,2,…,ng×ns}
(1)
式中:Ωn为第n种工况的目标函数;Fn为第n种情况下的后坐力。则设定多工况下的目标函数为
(2)

1.2 模块化基座的静动态优化函数
1.2.1 基于刚度的静态特性描述
模块化基座的刚度为主要的静态特性优化指标,因为武器站所受大载荷除后坐力载荷外,还有负载的重力载荷和惯性载荷,过大的载荷和过低的刚度导致的结构变形会影响武器站的指向精度,从而导致观瞄仪光轴和武器火线轴的错位。
在连续体结构中,结构柔度等于结构刚度的倒数,结构刚度和柔度为
(3)
式中:F为载荷;K为刚度矩阵;u为位移矩阵;C为柔度矩阵。
1.2.2 基于模态的动态特性描述
在模块化基座的模态为主要的动态特性优化指标,因为武器站的载体行进过程中会产生较低频的道路谱激励,过低的固有频率和过高的道路谱激励频率会激发结构的谐振特性,进而影响武器站的伺服精度,导致武器站在进行目标跟随时火线轴的随机波动。
文献[14]中定义了组合轮式车的加速度谱密度函数。基于加速度谱激励输入的动力学方程为
(4)
式中:M为质量承力构型的质量矩阵;a(t)为加速度矩阵;p(ω)为加速度激励谱,ω输入激励的频率分量;B为承力构型的阻尼矩阵;v(t)为速度矩阵;p(t)为位移矩阵,其中M、B和K与结构模态直接相关。将式(4)表述为输入输出方程为
(5)
式中:r(ω)为频率响应谱。
1.2.3 静动态优化函数建立
刚度目标函数为结构的应变能最小,应变能为
(6)
式中:ε和σ分别为载荷F下的应变和应力。
模态的目标函数为最小化结构的位移响应幅值,利用复模态叠加法[15],其第i阶自由度的位移响应为
(7)
式中:mi、ki和bi分别为第i阶模态的振子质量,刚度和阻尼;il为需优化的最高低阶模态,由于模态阶数越低,幅值响应越大,主要优化低阶模态。
将式(6)和式(7)中的目标函数做等效处理,将柔度函数等效为应变能目标函数,将幅值响应函数等效为固有频率目标函数为
(8)
式中:fs为固有频率。
在静态和动态目标的综合优化中,可利用归一化线性加权和法,将多目标问题转化为单目标问题进行优化,结合静、动态特性目标优化函数为

(9)
式中:w为应变能目标函数权值;Enmin为第n种工况下的应变能最小化目标函数。
1.3 武器站模块化基座综合目标优化函数
结合式(2)和式(9),可得在多工况和静动态下的武器站模块化基座综合目标函数分别为
(10)
式中:wmi(i∈{1,2,…,il})为不同模态下的目标函数权重,由于模态是模块化基座的固有特性,可直接通过线性加权法对wmi进行定义;(fs)i为第i阶固有频率;(fs)imax为第i阶固有频率的最大化目标函数;(fs)imin为第i阶固有频率的最小化目标函数;Enmax为第n个工况下的应变能最大化目标函数。
2 模块化基座的高效拓扑优化策略
2.1 粗拓扑和细拓扑优化方法
2.1.1 粗拓扑方法和超单元的子结构划分
粗拓扑可提取复杂结构中的承力构型,以避免细拓扑的计算消耗。采用水平集方法[3]进行粗拓扑较为合适,因为水平集方法寻优时采用具有分段特性的Heaviside函数,可使得拓扑边界清晰。
综合优化目标函数中包含的静态工况数和模态阶数多,导致优化计算量大。为提高效率,可对承力构型进行超单元划分,划分后的超单元应具有提供z轴方向支撑力的承压壁、提高x轴方向模态的抗弯壁和提供y轴弯矩和z轴扭矩的防扭壁,如图3所示。
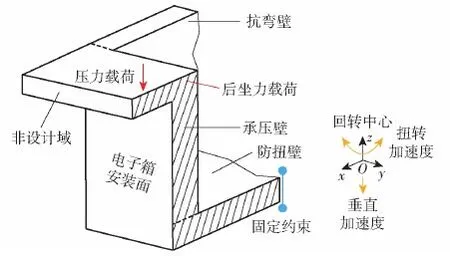
图3 承力构型超单元划分图Fig.3 Superelement division of load-bearing configuration
2.1.2 细拓扑方法和子结构优化方法选择
细拓扑可提取承力构型的筋条路径,为筋壁结构的成型提供基础。细拓扑采用变密度法[4]较为合适,因为变密度法的设计变量仅为网格单元密度,可通过解析式实现多样的工艺约束。为确保满足铸铝(ZL101A)的铸造工艺,本文引入最小和最大成员尺寸约束和分型面筋结构的拔模约束。
最小和最大成员尺寸约束可以防止出现细小筋结构和材料集中现象,其约束形式为
(11)
式中:L为离散空孔尺寸;Lmax为最大成员尺寸;Lmin为最小成员尺寸;nd为边界离散单元个数;Sid为第id个单元的表面积;ρid为第id个单元伪密度;
分型面筋结构的拔模约束可以有效使具有筋壁结构的铸件脱模,其约束形式为
s.t.(ρx)1≤(ρx)2≤…≤(ρx)it,it∈{1,2,…,nt}
(12)
式中:(ρx)it为拔模方向上的第it个伪密度;nt为拔模方向上的虚伪密度单元总数。
子结构优化方法可通过子结构的失效形式进行定义,子结构失效形式如表1所示。

表1 子结构的失效形式Table 1 Failure form of substructures
由子结构失效形式可知图3结构的优化思路为:
1)轴压壁:通过调整筋条的zy面数量和间距,以及壁结构厚度避免屈曲失稳和剪切失效,同时达到承力腔密封要求,因此需做筋壁结构设计。
2)抗弯壁:通过设计抗弯壁的zx面筋条布局和zy面截面形状来减少剪切应力,而壁结构的连续性会导致剪切失效,因此只做筋结构设计。
3)防扭壁:通过设计防扭壁zx面和zy面的截面形状,减少固定约束(固支边)的弯矩和平行于xy面的封闭剪切应力流,因此只做壁结构设计。
基于失效形式的子结构优化方法如表2所示。

表2 子结构优化方法Table 2 Substructure optimization method
参考单块式机翼的蒙皮骨架式结构[16]对细拓扑后的承力构型的筋壁结构进行表述,如图4所示。

图4 承力构型筋壁结构图Fig.4 Load-bearing reinforced wall structure
2.2 基于超单元的细拓扑优化方法
2.2.1 子结构刚度矩阵求解方法
由于子结构会保留刚度矩阵,可完成静态拓扑优化。由模态综合法[17]可知,超单元分解后子结构的内部自由度为ue,边界保留自由度为ur,则结合式(3),刚度静态方程为
(13)
式中:Krr为子结构刚度矩阵;Kee为边界缩聚结构质量刚度;Ker和Kre为耦合刚度矩阵;Fr为外部施加载荷;Fe为非优化子结构内部载荷。
通过式(13)的内部运算消除非优化子结构的内部自由度ue,即可得优化子结构的刚度方程为
(14)
式中:K′为超单元刚度矩阵;F′为超单元外部载荷矩阵。由于消除了ue,在拓扑优化迭代中不再计算非优化子结构的刚度方程,从而减小了计算量。
2.2.2 子结构模态矩阵求解方法
由于子结构不会保留远端的质量矩阵,无法实现动态(模态)的拓扑优化。由模态综合法[17]可知,忽略系统阻尼矩阵和外部载荷,其动态方程为
(15)
式中:Mrr为子结构质量矩阵;Mee为边界缩聚结构质量矩阵;Mer和Mre为耦合质量矩阵。
由于非优化域子的结构质量较小,对其质量矩阵的缩聚对总体模态矩阵影响较小。对非优化域子的结构内部自由度进行约束(ue=0),并缩聚为远程质量点,通过刚性多点约束(MPC)连接于边界自由度,缩聚后的子结构的模态方程为
(16)

2.2.3 动态方程子结构划分准则
由于在总体结构模态求解时只对总体结构的低阶模态进行求解,在保留的子结构中应保留总体结构的低阶模态。正则化处理的总结构和子结构的质量矩阵和刚度矩阵为
(17)
式中:I为单位矩阵;ΛL、ΛH、ΛrrL和ΛrrH为
(18)
φ和φrr分别为总结构和子结构的正则化模态,其由低阶模态φL和高阶模态φH组成,即
(φ,φrr)={[φL,φH],[(φrr)L,(φrr)H]}
(19)
提取总结构和子结构的低阶模态,并比较低阶模态(一般取前6阶)的固有频率,第i个总结构的低阶频率(f)i和第i个子结构的低阶频率(frr)i分别为
(20)
当式(20)中的子结构和总结构的固有模态频率相近时,说明超单元的子结构划分合理,反之需对其进行重新划分。
2.2.4 超单元的多工况和静动态拓扑优化方法
该方法可在ANSYS软件中通过各功能块结合APDL命令流编程实现,实现流程如下:
1)在软件中通过模型编辑模块中的Slice命令分解建立或导入的模块化基座模型文件。
2)将远端结构缩聚为远程质量点,并引入n个工况的载荷和约束,静力学求解后获得全模型文件。
3)缩聚全模型非优化子结构形成的子模型,并将相应工况的边界命令流引入相应子模型中。
4)进行静力学分析,求解后评估获得的子模型文件,并验证子模型和全模型求解结果的一致性。
5)在共享子模型的前提下进行模态分析,在缩聚子结构的边界上引入含有质量缩聚矩阵MPC单元。
6)求解子模型i阶模态,并对比全模型i阶模态,判断引入误差量级是否在可接受范围内。
7)将n个工况和i阶模态的子模型命令流汇聚后进行子结构的优化,并获得优化构型。
基于上述流程,该算法实现框图如图5所示。

图5 超单元的多工况和静动态拓扑优化方法Fig.5 Multi-condition and static and dynamic topology optimization method of superelements
3 模块化基座筋壁结构高效成型策略
3.1 基于拓扑构型的壁结构设计方法
3.1.1 基于拓扑构型的壁结构设计流程
不同工程领域的载荷水平不同,对应的筋壁结构形式也不同[7],具体分为表3中的3种情况。

表3 基于载荷水平的筋壁形式Table 3 Form of reinforced wall based on load level
武器站的载荷形式与白车身惯性载荷不同,其约束不能设定为惯性释放[15],而应设定为固定约束,因此不能设计成薄壁高筋结构。武器站载荷形式与重型施工机械受到大碰撞载荷不同,其载荷量级和应力集中远达不到连续壁厚结构,故承压壁结构应为中筋中壁结构,此时壁结构起到承力作用。
基于拓扑优化的筋壁结构设计方法通常基于带壁厚[11]和无壁厚的拓扑优化方法[7],无壁厚的拓扑优化方法计算量较小,但拓扑精度较低。带壁厚的拓扑优化精度较高,但存在工艺约束冲突的问题。由优化目标可知,屈曲失稳和剪切破坏并不是优化目标,且拓扑精度不是主要方向。因此,本文基于无壁厚的拓扑优化方法设计筋壁结构,其流程图如图6所示。
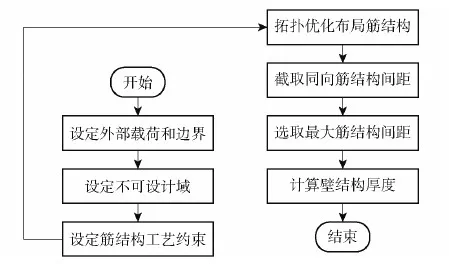
图6 基于拓扑优化的壁结构设计流程Fig.6 Design flow of wall structure based on topology optimization
3.1.2 基于失效约束的壁结构设计方法
由图4可知,壁结构的失效源于压力载荷造成的屈曲失稳和后坐力载荷造成的剪切破坏[15],对于各向同性的金属材料壁结构,局部屈曲许用应力[7-15]为
(21)
式中:[σ]N为材料屈曲许用应力;kN为屈曲失稳系数;EN为材料弹性模量;Lt为壁厚度;Ls为筋条间距;kr为筋条支持系数。
局部剪切许用应力[15]为
(22)
式中:[σ]s为材料剪切许用应力;ks为局部破坏系数;Es为材料剪切模量;Ll为筋条长度。
根据分析可知,许用应力在计算时,筋条方向需与载荷方向正交,由于拓扑优化的筋条路径为非规则排布,难以利用式(21)和式(22)直接进行计算。
针对以上问题,本文提出一种基于载荷和筋条路径的壁厚计算方法。在载荷方面,利用von Mises应力(等效应力),将外载荷正交分解为压力载荷和剪切载荷,并作为壁厚设计依据。在筋条路径方面,利用离散化方法将筋条分解为剪力向和压力向的筋条微元,将等水平线位置的压力向微元间的壁结构的屈曲和剪切许用应力分别等效为式(21)和式(22)。
首先根据压力载荷方向对筋条路径离散化;然后截取压力向微元间的最大间距;最后计算屈曲应力和剪切应力下的最小壁厚,并选取较厚壁厚为壁结构厚度。筋条离散化和间距截取方法如图7所示。

图7 筋条离散化和间距截取方法Fig.7 Reinforcement discretization and spacing interception
基于载荷和筋条路径的壁结构厚度计算公式为
(23)
式中:(Lt)N、(Lt)S分别为根据屈曲许用应力和剪切许用应力求解的壁结构厚度。
3.2 基于灵敏度的响应面寻优策略
3.2.1 基于试验设计的响应面模型
由于拓扑优化的筋条包络不规则,为简化工艺可采用矩形筋条逼近筋条外形。而矩形筋条的参数寻优可采用响应面法[5],其包括试验和模型设计。
在试验设计方面,本文采用拉丁超立方体抽样设计方法。在采样点数选择时,采用中心复合设计方法得到
No=1+2no+2no-o
(24)
式中:No为样本点数目,o为筋条和壁的总水平数目(筋高、筋厚和壁厚);no为筋条和壁的总数目。
在模型设计方面,本文采用可弥补多项式响应面不适应输入变量产生非线性振荡的Kriging模型,结合筋壁结构参数的Kriging模型为
G|r(lm)|=Gf(lm)+GZ(lm),m∈{1,2,…,o}
(25)
式中:lm为第m个筋壁结构的设计变量;Gf(lm)为第m个多次响应面模型;GZ(lm)为第m个期望为零残差模型。
3.2.2 基于灵敏度分析法的筋壁结构寻优
响应面选定筋高、筋厚和壁厚为输入变量,确定最低刚度和最低模态为优化目标。为简化输入参数变量,通过灵敏度分析法筛选与刚度和模态相关的高灵敏度变量进行参数优化,其中输入变量的刚度灵敏度和模态灵敏度函数分别为式(26)和式(27):
(26)
(27)
式中:E为应变能;Δlm为变量变化量;Φ为模态向量。
基于高灵敏度参数变量的二次优化函数为
(28)
式中:lh为高灵敏度输入变量;(1/fs)max最低阶模态;(E)max为最高应变能工况;m′s为质量上限;ms为参数化模型质量。
本文应用基于快速非支配排序遗传算法(NSGA-II方法)的多目标遗传算法(MOGA)寻找参数化的最优承力构型。
4 仿真设计方法与实际工程算例
4.1 综合目标函数权重定义
武器站受力来源为武器后坐力和重力过载[18]。重力过载和武器后坐力冲击情况如表4所示。
射角工况本文考虑最大仰角击发和水平击发两个极限射角工况。射击功能区工况本文考虑3个射击功能区工况。基于不同射角(2种)和不同功能区(3种)共能确定2×3种(6种)工况。
根据武器站的验收标准,两种射角工况,水平射角工况更为重要。3种功能区工况,中功能区工况更为重要。基于层次分析法[17]设计工况的权重,数据归一化处理后,6种工况的权值如表5所示。
表4 重力过载冲击和武器后坐力冲击Table 4 Gravity overload impact and weapon recoil impact
表5 工况权重Table 5 Working condition weight
由于武器站对低阶(前3阶)机械模态要求较高,通过线性加权法定义其模态权重,如表6所示。

表6 模态权重Table 6 Modal weight
4.2 粗拓扑承力构型算例
模块化基座的承力构型提取的步骤为:首先根据设计简图进行三维建模设计,形成初级构型;然后在初级构型上结合综合目标函数,并利用水平集方法进行粗拓扑;最后在拓扑构型上进行二次构型,得到承力构型。承力构型的提取流程如图8所示。
图8 承力构型的提取流程Fig.8 Extraction process of load-bearing configuration
图8中,水平集方法的拓扑构型存在局部孔隙化,不满足工艺和局部刚质比低等问题,因此需要通过变密度法进行二次构型。
4.3 超单元子结构划分与前处理算例
超单元除可进行高效拓扑优化外,同时可引入分区网格,使精确的六面体网格得到应用。子结构划分图和分区六面体网格图如图9(a)和图9(b)所示。
承力构型约束非优化子结构的内部自由度后,边界载荷分别如图10(a)和图10(b)所示。
图9 承力构型的子结构划分图和网格图Fig.9 Diagrams of substructure division and grid

图10 承力构型边界载荷图Fig.10 Load-bearing configuration boundary load
将非优化子结构的质量矩阵缩聚为质量点引入MPC单元后,会引入稍许的误差。取超单元承力构型的前6阶模态的固有频率与图8的承力构型作比较,两种构型的模态精度对比结果如表7所示。可见,质量矩阵缩聚后,确实会引入模态误差,但是在可接受范围内。
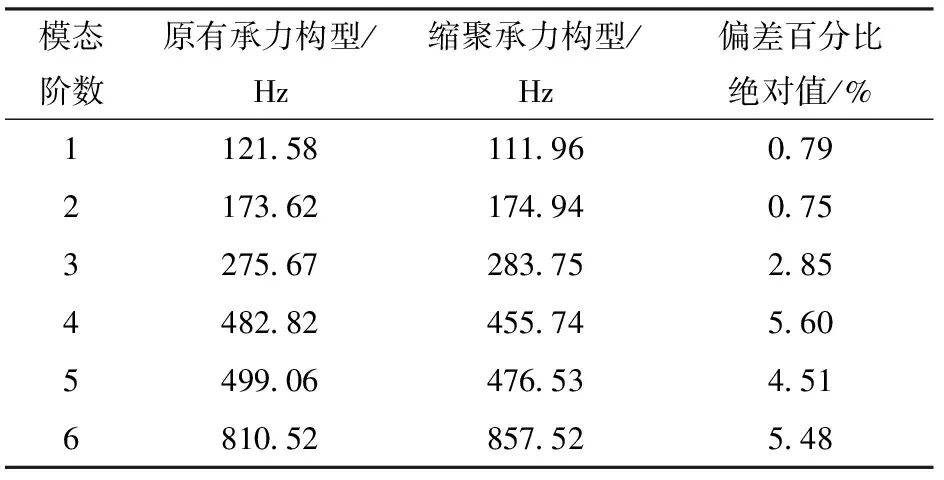
表7 模态精度对比Table 7 Modal accuracy comparison
4.4 超单元的多工况与静动态细拓扑效果论证
4.4.1 多工况与静动态拓扑优化效果论证
为验证超单元的多工况和静动态拓扑优化方法的有效性,在质量约束(30%)和全局von Mises应力约束(230 MPa)下对承压壁和抗弯壁进行拓扑优化,若成功收敛则代表质量约束可行,且为最优化轻量化构型。分别利用多工况静态拓扑优化方法[6]、动态(模态)拓扑优化方法[16]和多工况和静动态的拓扑优化方法对承压壁和抗弯壁进行拓扑优化,结果分别如图11(a)、图11(b)和图11(c)所示。

图11 承力构型拓扑图Fig.11 Load-bearing configuration topology
由图11可见,图11(c)的承压壁拓扑结果与图11(a)相似,均具有高的承压特性;图11(c)的抗弯壁拓扑结果与图11(b)相似,均具有较高的摆振固有频率;图11(c)拓扑方法有效地弥补了图11(a)拓扑方法低固有频率的缺陷,同时有效地弥补了图11(b)拓扑方法的低刚度缺陷。
取图11中不同拓扑结果6种工况下的最大变形和前3阶的固有频率进行对比,结果如表8所示。
由表8可知,图11(c)相对于图11(a)构型具有更高的固有频率,相对于图11(b)构型具有更高的结构刚性,可见多工况和静动态的拓扑优化有效地兼顾了刚性和模态的协同优化。
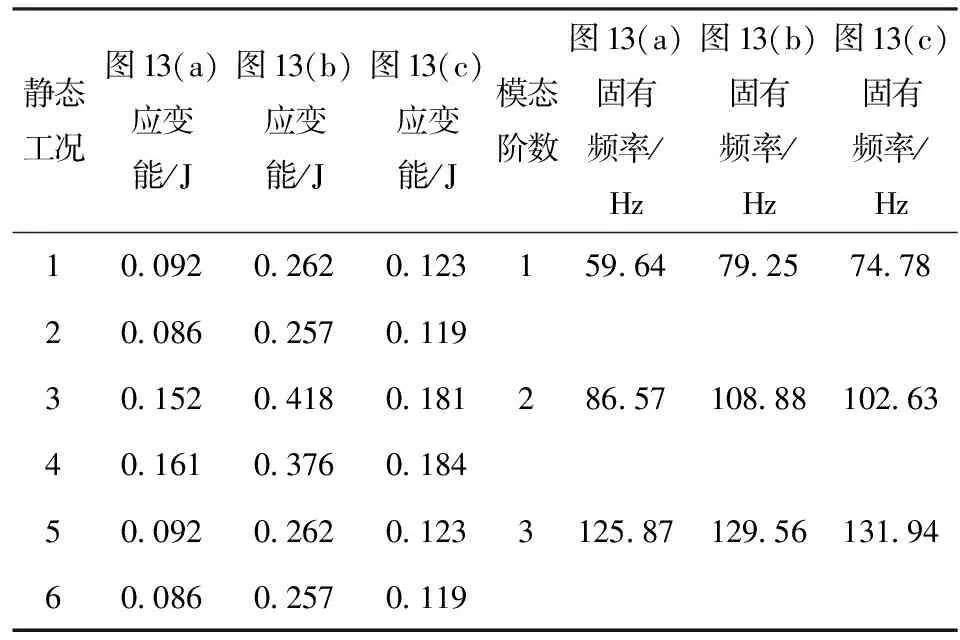
表8 优化方法对比Table 8 Comparison of optimization methods
4.4.2 超单元的拓扑优化效果论证
基于双核分布式运算的全模型和超单元的多工况以及动静态拓扑优化方法所用的网格数量,节点数量,计算时长和迭代步如表9所示。

表9 计算消耗对比Table 9 Comparison of computational cost
由表9可知,超单元的拓扑优化方法在综合优化目标下的求解时长相对于全模型的拓扑优化方法缩减了92%,充分验证了其优越性和必要性,同时优化构型极为相似,不再赘述。
4.5 参数化筋壁结构成型算例
4.5.1 壁结构设计效果论证
壁结构设计主要与承压壁筋条间距相关,通过图11(c)的拓扑结果和外载荷为对称载荷,对单侧的筋条进行选取,选取结果如图12所示。
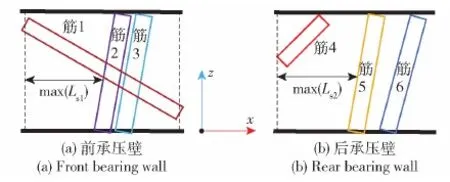
图12 轴压壁参数化筋条选择图Fig.12 Parametric reinforcement selection of bearing wall
选取max(Ls1,Ls2)=0.09 m作为最大间距,经过式(20)计算可得屈曲失稳系数kN=4,经过式(21)计算可得剪切失稳系数ks=7.2,根据式(23)可得屈曲失稳和剪切破坏约束下的最小壁厚为0.008 m和0.007 m,这里取壁结构厚度为0.008 m。
壁结构设计完成后,将图11(c)的不规则筋条拟合成矩形筋条,可得参数化构型如图13所示。

图13 承力构型参数化三维模型Fig.13 Parametric 3D model of load-bearing configuration
为验证壁结构是否屈曲失稳或剪切破坏,其静力学分析后的参数化构型各工况下的壁结构最大von Mises应力如表10所示。

表10 壁结构最大应力Table 10 Maximum stress of wall structure
由表10可知,壁结构von Mises最大应力均小于材料(ZL101A)许用应力230 MPa,由此可知基于失效约束的壁厚能有效避免屈曲失稳和剪切破坏。
4.5.2 基于灵敏度的筋壁结构成型效果论证
选取图12中6条筋的高度和厚度以及承压壁厚度,共13个设计变量;选择图13中3条筋的高度和厚度,一共6个设计变量。为方便电子箱安装和简化设计变量,设定轴压壁的筋高一致,抗弯壁的筋高一致,共12个设计变量。
通过式(24)计算出试验次数为252次,在6个工况和3个模态下进行计算,此时解算次数达到(252×9)2 268次,试验时长达到52 h32 min。为缩减计算消耗,对工况3和1阶模态下的12个设计参数进行灵敏度分析,结果如图14所示。
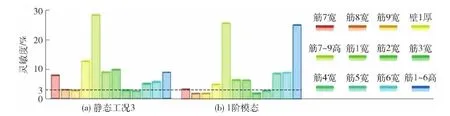
图14 参数灵敏度分析结果Fig.14 Parameter sensitively analysis result
由图14可知,将灵敏度超过3%的参数设定为高灵敏度参数(为8个),则试验次数为147次,在2个工况和1个模态下的解算次数为(147×3)441次,试验时长为6 h33 min,由此缩减了83.7%的试验时间。
选择轴压壁筋高和抗弯壁筋高两个灵敏度超过20%的参数,表征刚度(见图15(a))和模态(见图15(b))响应面,可看出筋的尺寸增加可有效减小应变能和增加1阶固有频率,其Kriging响应面如图15所示。
此时通过建立好的响应面模型,利用多目标遗传算法及式(28)对响应面模型进行优化,限定质量参数不再增大,优化前后的8个参数如表11所示。优化后可看出,抗弯壁的筋高缩减到了设定的下界0.02,其余都增大到了设计上界0.03。
对承力构型重新建模,对比优化前、后承力构型6个工况下的刚度、模态和质量参数,如表12所示。由表12可知:承力构型整体质量降低了28%,虽然刚度和模态虽然有所下降,但是其为最优轻量化构型;低阶模态均大于速度环伺服频率90 Hz,同时优化前后低阶模态变化量较小,而高阶模态下降较快,有效地兼顾了轻量化和良好的动态特性。
4.6 基于最优承力构型的校核验证与样机实现
在最优构型上,添加腔结构和互换性结构,以满足电子箱的安装密封性和功能部件的可重构性要求,最终构型及其适配的四款典型武器站如图16所示。

图15 Kriging响应面Fig.15 Kriging RSM

表11 优化参数Table 11 Optimization parameters
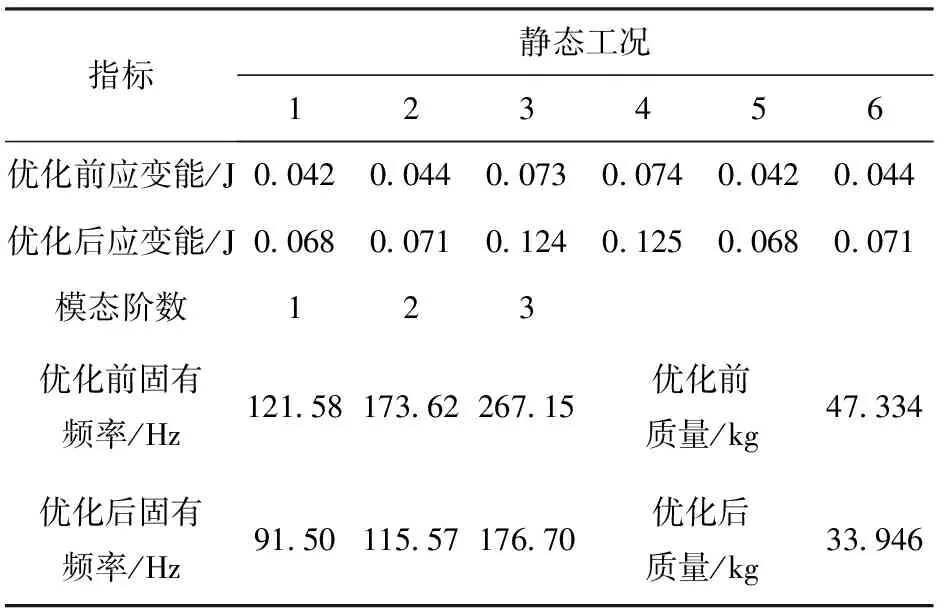
表12 优化前后指标Table 12 Indexes before and after optimization

图16 国产可重构集成武器平台Fig.16 Domestic re-configurable Integrated-weapons Platform
模块化基座的成型后的评价指标主要为基于强度的安全系数和基于刚度的振动位移。
安全系数指标在综合目标优化函数中体现为失效约束。进行校核时,应结合时域还原其瞬态冲击工况。结合文献[13]的坠撞安全试验,选用具有合理允差的后峰锯齿脉冲作为重力过载冲击;选用实测重载机枪后坐力时域波形[19],并将其离散为后峰锯齿脉冲作为后坐力冲击。极限冲击时域激励如表13所示。

表13 极限冲击时域激励Table 13 Time domain excitation of limit impact
将后坐力和惯性力加载到模块化基座上,前25 ms的应力曲线和安全系数曲线如图17(a)、图17(b)所示。
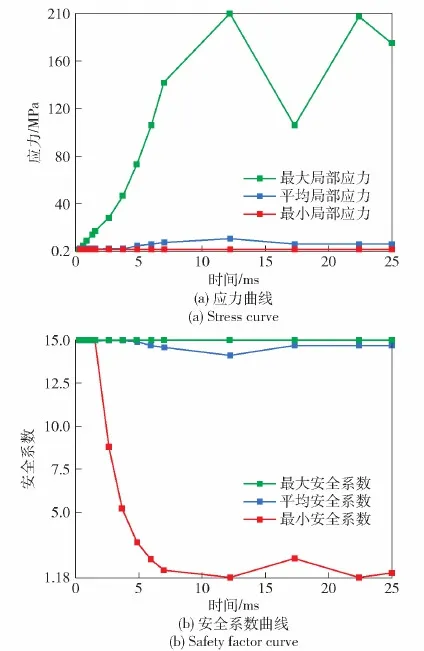
图17 应力曲线和安全系数曲线Fig.17 Stress curve and safety factor curves
由图17可知,在极限工况下,安全系数均处于临界值偏上,这样可很好地兼顾结构强度和轻量化程度,达到轻量化设计最优效果。
振动位移指标在综合目标优化函数中与静态刚度和模态相关,其能综合表征系统的指向精度和伺服精度。进行校核时,将x轴、y轴、z轴方向的频域加速度谱密度函数[13]作为激励加载到模块化基座上,其x轴、y轴、z轴方向的位移响应云图分别如图18(a)、图18(b)和图18(c)所示。

图18 三向位移响应云图Fig.18 Displacement response cloud pictures in three directions
图18中,黑、白色箭头分别代表左、右安装面的形变最缓梯度线。参考图8坐标系可知:当箭头方向一致时,会造成绕y轴的弯曲形变;当箭头方向相反时,会造成绕z轴的扭转形变。由图18可知,x轴、y轴、z轴方向的载荷谱均会造成绕y轴的弯曲形变,可近似定义误差表达式为
e=max {[max (s)-min (s)]/lg}
(29)
式中:max (s)和min (s)分别表示安装面最大、最小形变位移;lg为形变最缓梯度线长度。由式(29)可近似计算出影响指向精度和伺服精度的误差为0.16 mrad小于射击精度指标(CEP=1 mrad)[20],满足设计要求。
校核完毕后,为验证模块化基座的可加工性及快速可重构性,对其进行试制,应用模块化基座的某型竞标武器站现场装配结构如图19所示。
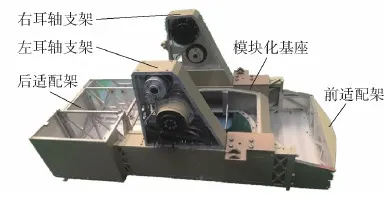
图19 模块化基座现场装配图Fig.19 Drawing of field assembly of modular base
试制完成后的模块化基座在标准化验收流程中均满足各项预期性能指标。由此即完成了国产化武器站模块化基座的整体设计、加工、装配和应用。
5 结论
本文设计完成了国内第一款武器站模块化基座,在武器站领域有一定的开创性意义。得出主要结论如下:
1)模块化基座应在多工况下以结构刚度和模态为优化目标进行轻量化设计,以保证武器的指向精度和伺服精度。
2)模块化基座应基于超单元法进行综合目标优化函数下的拓扑优化,以确定筋结构的布局与初始截面参数,减少综合目标函数下的计算消耗。
3)模块化基座可通过基于失效约束壁厚设计方法快速设计壁结构,并可基于灵敏度分析进行筋壁结构的响应面参数寻优,以简化实验设计计算消耗。