模糊熵特征选择与SVM在三相异步电机故障诊断中的应用
2023-03-19肖永茂鄢威龚青山
肖永茂,鄢威,龚青山
(1.黔南民族师范学院计算机与信息学院,贵州 都匀 558000;2.武汉科技大学绿色制造工程研究院,湖北 武汉 430081;3.湖北汽车工业学院汽车动力传动与电子控制湖北省重点实验室,湖北 十堰 442002)
1 引言
三相异步电机以其结构简单,运行效率高被普遍应用于实际生产中。然而由于异步电机工作原理的特殊性,异步电机通常工况恶劣不可控加上其本身结构复杂,因此故障发生率居高不下。电机耗电量巨大,其占整个电力系统耗电量60%以上,故障一旦发生,对正常生产、经济效益和人身安全都会带来严重隐患,因此对异步电机实施有效的早期故障诊断,对其本身的正常运行至关重要。
文献[1]针对电机故障特征信号处理数据量大的问题,提出运用SPIN算法,有效提取电机故障特征信号,实现电机在线诊断。文献[2]针对转子系统故障难识别的问题,提出模糊熵的诊断方法。采用模态分解得到模糊熵样本值来有效获取振动信号,为故障诊断建立理论基础。文献[3]选用RBF核函数的算法,通过特性分析和参数优化对电机进行诊断。文献[4]运用参数估计算法,通过研究获取电机故障的4个特征参数,结合仿真分析验证了该方法的可行性。文献[5]针对支持向量机在故障分类上的多故障分类问题,研究了如何运用样本集进行训练测试,探索了实现有效故障诊断的方法。文献[6]针对电机启动易出现故障的问题,提出运用STFrFT方法,有效表征了异步电机故障特征频率变化趋势。文献[7]提出了运用近似熵与SVM结合的方法对发动机故障信号进行识别和诊断。文献[8]基于变分模态分解模糊熵方法,有效获取了振动信号特征量值并结合算法对断路器进行在线诊断。
基于以上分析,当前针对故障信号的提取方法进行了大量的研究,并试图通过故障信号有效识别对故障进行早期预警与诊断。本研究由于研究对象异步电机的振动信号区别微弱,采用一般的信号分析方法难以有效量化。因此提出采用基于模糊熵特征选择与支持向量机(Support Vector Machine,SVM)融合的方法对异步电机开展故障诊断。通过设计故障再现实验,分别测取其对应的振动信号,通过对信号测取与处理得到相应的模态分量,计算其对应的模糊熵值并获取特征向量,最后结合支持向量机分类器在故障分类上的高准确性,达到对电机不同状态类别诊断的目的。
2 模糊熵
模糊熵是基于样本熵提出的一种改进算法,其主要应用在信号复杂难以量化的问题,能有效量化信号指标。模糊熵的计算步骤具体如下。
3 基于模糊熵异步电机故障特征选择
设备作业时都会存在机械振动,因此可以构造故障再现振动信号测取试验[9]。据统计实际工作中电机故障主要有:转子弯曲、转子不平衡和基座松动,加上正常电机因此需构造4种电机类别实验。电机在实际作业时导致其振动的振源较多,加上任何机械设备都存在着固有机械振动,因此想有效提取其对应的故障特征信号较难,基于此本研究选用模糊熵信号分析方法。其算法流程,如图1 所示。

图1 算法原理示意图Fig.1 Schematic Diagram of Algorithm Principle
3.1 异步电机不同故障状态模拟试验
本研究选用Marathon 公司的HJN1 100L1−4 型号的三相异步电机,在某高校电机实验台上进行不同故障再现试验。采用INV(英维)数据采集系统,分别对电机3种常见的故障状态类别加上正常电机共4种状态进行信号采集,相关参数,如表1所示。
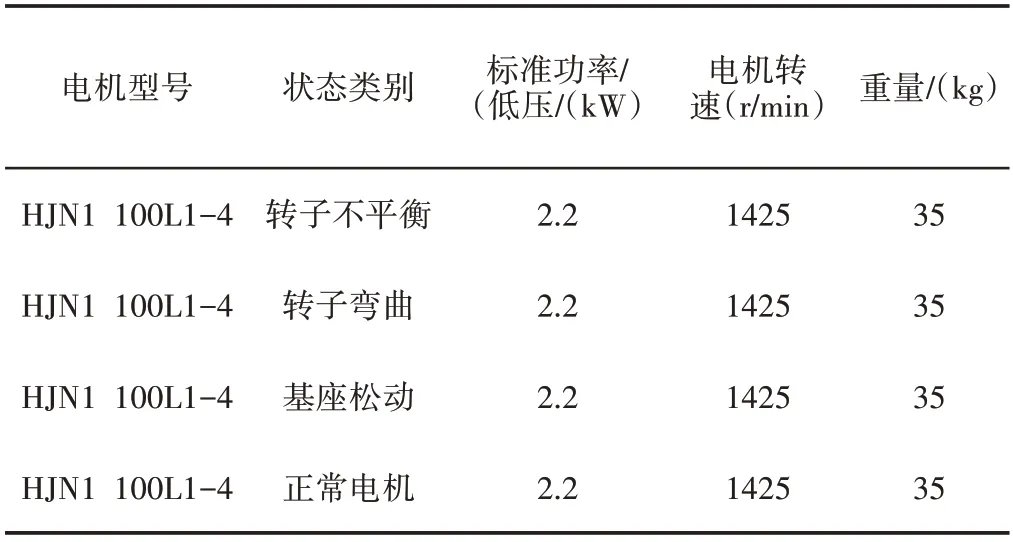
表1 试验采用4种状态三相异步电机相关参数Tab.1 The Test Uses 4 States of Three-Phase Asynchronous Motor Related Parameters
实验安排:
在某实验台上进行不同故障再现试验。实验所用相关器件及性能参数如下:
异步电机HJN1 100L1−4,标准电压380V,标准功率2.2kW,电机转速为1425r/min,重量35kg。
加速度传感器CA−YD−186,频率范围:(0.1~6)kHz。
YE3832 IEPE信号适调器,输出幅度:2.5V±2.2V。
对异步电机故障模拟试验,分别选取四种状态类别的电机进行试验。实验现场,如图2所示。系统采样频率fs=50kHz,采集时间t=10s。依据生成波形图,频率设置满足试验要求。分别在电机端盖及定子外安装加速度传感器,采用磁铁固定以获取2个测点振动信号,单个测点测取20个样本,在故障实验台上分别更换4种状态的电机,即共(4×2×20)个样本。随机选取正常电机及转子不平衡某一段1s时域波形,如图3、图4所示。
图2 振动测试试验系统Fig.2 Vibration Test System

图3 正常电机Fig.3 Normal Motor

图4 转子不平衡电机Fig.4 Rotor Unbalance Motor
对比图3、图4 可发现,转子不平衡比正常电机振动要更强烈,但不能直接作为故障状态判别。因此还需进一步信号处理,据此引入模糊熵算法。
3.2 模糊熵参数确定
设置模糊熵参数m、r和N,依据统计学分布,通常m=2,r=0.1~0.25SDx,(此处SDx为原始数据u(i)的标准差),N为100~5000。
3.3 模糊熵特征向量提取
基于故障再现试验,采集到异步电机(4×2×20)个振动样本,设每个振动信号为x(i),故有x(1),x(2),…,x(160)共160 个点。对应某一状态i下双侧点所测样本值Ti如下:
对应第i种状态有(20×2)的样本矩阵,基于式(9)确定每一个模糊熵值便可以得到相应矩阵,将其每行划分得到20个特征向量。因此电机某一状态下有20 个模糊熵特征量,即Si=[Ei,1Ei,2…Ei,20]T,异步电机模拟试验共4 种类别,即共对应80个模糊熵特征向量。
数字PCR打破传统的食品检测技术,不受扩增效率约束、无需使用内参基因与标准曲线,检测准确度高,并且具有较强的灵敏性、耐受性和绝对定量的优势。现如今,数字PCR技术已经得到了广泛应用,未来发展前景非常广阔。
4 故障诊断实例
基于上述分析结果,考虑到划分的特征向量属于小样本集且故障类别明确,选用支持向量机算法[7]对故障进行诊断。
4.1 支持向量机(SVM)算法
异步电机故障分类问题属于线性回归问题,可用式(10)来表示:
故障分类诊断可由式(11)求其min值表示:
式中:c—惩罚因子;ξ,ξ∗—松弛变量的上下限。
约束条件为:
支持向量机模型构建流程图,如图5所示。

图5 SVM构建流程图Fig.5 SVM Construction Flow Chart
4.2 异步电机故障诊断
构建SVM多故障分类器,其模型为:
基于上述试验设计安排,分别在4种状态的电机端盖及定子外安装加速度传感器,获取2个测点振动信号,因此每组状态可获取1#测点和2#测点的测试样本,且由于单个测点测取20个样本,即共(4×2×20)个样本。
利用SVM对异步电机4类状态进行诊断,4种状态各20组,即共4×20 组特征量。划分其中60 组进行训练,剩余20 组进行验证。将训练样本带入SVM故障诊断分类器进行训练,而后运用测试样本验证。每种状态选取10 组测试数据,进行4 次测试,每种状态测试10组。其中每组状态的前4组测试数据,如表2所示。

表2 异步电机各状态类别的模糊熵值Tab.2 Fuzzy Entropy Values of Each State Category of Asynchronous Motor
依据训练样本在Matlab 中进行训练,当Ci和σi参数在:C=100,σ=1时,训练精度最高。同时利用所构建SVM故障分类模型对表2中数据进行验证,其分类结果,如图6所示。

图6 模糊熵与SVM结合故障分类Fig.6 The Combination of Fuzzy Entropy and SVM for Fault Classification
从图6可发现,运用SVM分类模型对测试样本进行诊断,准确率为97.5%,仅有一个转子弯曲被误判为基座松动故障。
4.3 SVM与改进BP神经网络故障诊断方法对比
选择改进BP神经网络[10−11]对异步电机模糊熵特征量进行诊断,采用3层拓扑结构构造异步电机分类模型,同样选择相应的训练样本和验证样本,先对模型训练而后进行验证,其分类结果,如图7所示。从图7结果可发现,一个正常电机状态被误认为转子不平衡故障、一个转子弯曲故障被误认为基座松动故障,一个基座松动故障被误认为转子弯曲故障,共有三组状态类别被误判,准确率为92.5%。
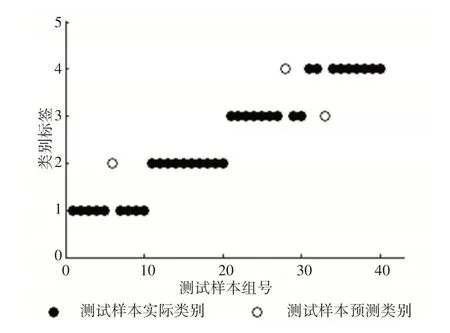
图7 模糊熵与BP神经网络结合故障分类Fig.7 Fault Classification Based on Fuzzy Entropy and BP Neural Network
4.4 结果对比与分析
运用常用的故障诊断方法SVM 与改进BP神经网络进行对比,从图6、图7可发现,运用模糊熵与SVM结合对异步电机故障类别进行诊断,仅有1组出现误差,诊断精度为97.5%,而运用改进BP 神经网络进行诊断出现了3 组类别误判,诊断精度为92.5%。对比结果,如表3所示。
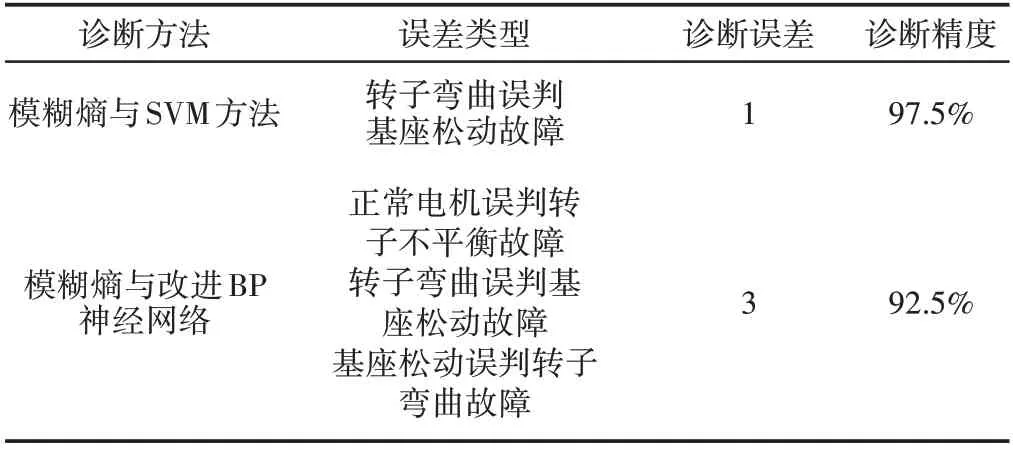
表3 诊断结果对比Tab.3 Comparison of Diagnostic Results
结合表3、图6、图7可看出,采用模糊熵结合SVM 故障诊断方法对异步电机具有更高的准确度,且在训练时间和测试时间上更快,而基于BP神经网络的诊断方法,其在大样本,循环学习中具有优势,因此在这里的研究中,选用模糊熵结合支持向量机方法对异步电机进行故障诊断,其诊断精度和效率更高。
5 结论
(1)针对三相异步电机容易出现故障、早期预警难,故障难识别,提出一种模糊熵特征选择与SVM相结合的故障诊断方法。
(2)通过设计故障模拟再现试验,利用振动诊断技术,测取其4种不同状态的振动信号,运用模糊熵算法对每个信号进行模糊熵求值,获得了对应的模糊熵故障特征量。
(3)选用模糊熵处理异步电机故障状态的振动信号,结果表明模糊熵能有效处理不规则信号且结合SVM对异步电机进行故障诊断,对比BP神经网络方法,其诊断精度和效率更高。
