输电线路除冰机器人视觉定位方法研究
2023-03-19李辉熠李希谢景伟
李辉熠,李希,谢景伟
(1.湖南大众传媒职业技术学院,湖南 长沙 410100;2.湖南师范大学,湖南 长沙 410081)
1 引言
由于输电线路覆冰、积雪等原因经常引起一些事故,如线路舞动、绝缘子闪络等,从而造成重大的经济损失,严重威胁着电网的安全运行[1]。传统的手动除冰方法具有高风险和低效率等问题,随着科学技术的发展,用机器人代替人工除冰已是大势所趋,但现阶段仍有许多亟待解决的问题。特别是机器人需要执行一些复杂功能时,如障碍物穿越和手臂抓线控制等[2]。因此,为了实现电力线的自主操作,除冰机器人需要具有越障功能,而解决越障的首要问题是实现电缆线位置的自主识别。
由于高压输电线路的障碍物多样且复杂,输电线路的环境也相对恶劣。当前,国内外现有的输电线路作业机械人大多不具备越障功能,因此自主抓线是一个迫切需要解决又难度较大的问题。在文献[3]中,提出了一种单目测距算法,用于巡线机器人的视觉导航。利用Hough变换检测视频帧图像中巡线机器人的行走导线的两侧,获得障碍物和镜头之间的距离,并执行线性校正。经过测试,具有很高的准确性和鲁棒性。在文献[4]中,提出一种粒子群优化的小波神经网络识别方法,用于高压输电线路除冰机械人对输电线路进行障碍物识别和分类。测试结果表明,该方法可以有效识别输电线路障碍物。在文献[5]中,基于悬臂运动的仿生原理,提出一种新型的除冰机器人双臂越障结构。通过分析,阐述了双臂交叉避障的原理,并使用软件仿真了结构驱动模型。结果表明,仿生双臂交叉结构可有效提高除冰机器人除冰过程的稳定性和效率。在文献[6]中,在当前输电线路除冰机器人研究现状的基础上,提出一种新型的在线越障行走机构,并介绍了自主研发的除冰机器人。这些研究为解决除冰机器人在输电线路上的视觉定位问题提供了理论依据。基于此,给出一种用于输电线路除冰机械人的视觉定位方法,用于机器人越障时的机械臂对准。使用Gabor变换把电缆线从背景中提取出来,然后使用最小二乘法检测电缆位置。通过不同光照度实验验证该定位方法的准确性和鲁棒性。
2 系统框架
除冰机器人是一个复杂的机电一体化系统。采用分级智能控制方式,如图1所示。高压输电线路除冰机械人控制系统由两部分组成,地面监控系统和机器人本体控制系统。地面监控系统:由监控主机和无线网卡模块组成。监控主机主要用于显示和存储机器人采集的图像。使用由无线网卡组成的网络进行远程图像传输,通过无线网络进行除冰机器人力的远程控制[7]。机器人主体控制系统:负责分解、协调和任务执行。机器人主体控制系统通过无线网卡与地面通信,指挥机器人进行除冰。
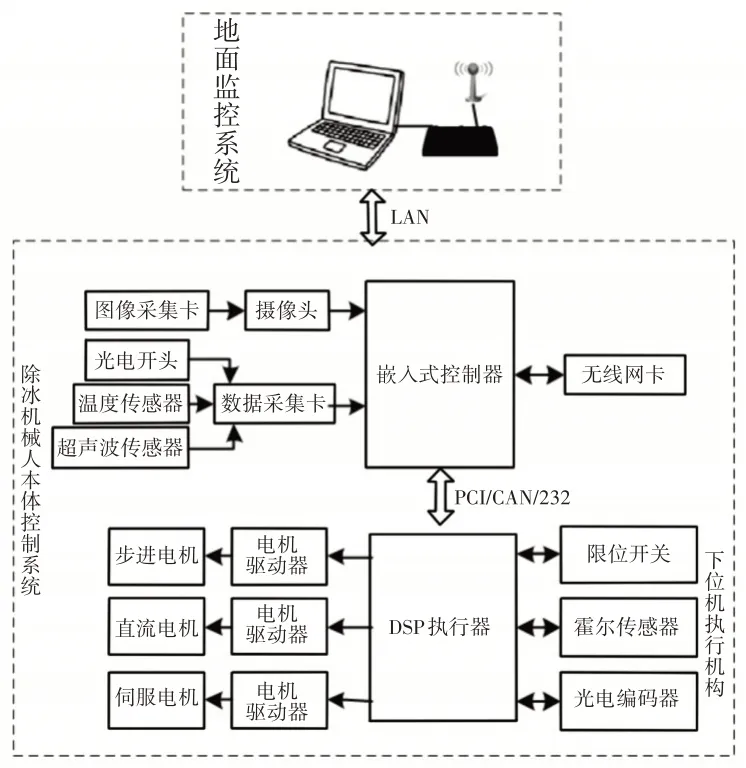
图1 系统框架Fig.1 System Framework
3 定位算法
电缆线定位方法步骤如下所示:(1)对原始图像进行预处理,以减少光线对电缆线纹理图像的影响。(2)检测图像的边缘并估计电力电缆的纹理方向。将(2)获得的纹理方向作为Gabor滤波器方向参数,并将边缘检测到的图像与其卷积获得增强图像[8]。(3)进行阈值分割提出电缆的纹理区域,然后用最小二乘法检测电缆线位置。算法流程图,如图2所示。

图2 定位算法流程Fig.2 Positioning Algorithm Flow
3.1 图像预处理
由于电力线的环境复杂,在图像拍摄过程中,机械臂监控相机容易在电力电缆附近产生局部反射。这样的反射会损坏电力电缆图像的图像质量并模糊边缘[9]。此外,如果监视相机直接暴露在阳光下,会导致图像的整个前景变暗。这些影响是无法人为控制,为提高机器人监控相机在一些复杂环境中可靠性,需要优化视觉算法[10]。
同态滤波被广泛用于不均匀照明下的图像校正。同态滤波不仅降低低频,而且增加高频,降低光照变化,使细节边缘更加清晰。将同态滤波方法应用于电力电缆图像的预处理,以减少图像上不均匀的光干扰。
在光反射模型中,图像f(x,y)如式(1)所示,用入射分量i(x,y)与反射分量r(x,y)的乘积[11]。
同态滤波的原理是通过滤波功能抑制入射分量,增强反射分量,从而实现图像的照度补偿,减少照度干扰。图像同态滤波步骤如下:
(1)用对数变换和傅立叶变换来分离图像f(x,y)的两个频率变量。
(2)选择适当的同态滤波器传递函数来变换入射和反射,获得增强图像。
(3)对处理后的频域图像进行傅立叶变换和指数变换以获得增强图像。
对式(1)取对数,如式(2)所示[12]。
对式(2)进行傅里叶变换[13],如式(3)所示。
假设滤波器函数为H(x,y)变换,如式(4)所示。
对式(4)进行傅里叶逆变换,如式(5)所示:
对式(5)进行指数变换,得到处理后图像,如式(6)所示。
3.2 边缘检测和方向场估计
在同态滤波之后进行边缘检测,以便直观展示图像纹理的细节。使用Canny边缘检测方法,
定义了三个基准[13]。
(1)所检测的边缘信息具有最低的误检测率和漏检率,评价参数的信噪比SNR最大。(2)观察到的边缘信息应尽量接近实际边缘,使定位精度最大化。(3)边缘响应次数最少为一个。
在Canny的边缘检测中,高斯平滑的质量对检测结果有直接的影响。因此,滤波器被定义为f(x),G(x)表示边缘图像。假设边缘的中心在x=0处,则滤波器的相应结果HG,如式(7)所示[14]。
假设滤波器具有有限脉冲响应,范围[−w,+w]。
噪声的均方根Hn,如式(8)所示。
根据式(7)和式(8),SNR如式(9)所示。
定位精度为所提取边界与真实边界误差,如式(10)所示。
根据边缘响应次数唯一,如式(11)所示。
选择了高斯平滑滤波器。高斯模糊一般用于减小图像尺寸。对于欠采样通常在采样之前对图像进行低通滤波。这样,可以确保采样图像中没有虚假的高频信息,如式(12)所示[15]。
4)利用有限站点的地基GPS了解成都地区的水汽分布,这为在不同地区进一步建设地基GPS站提供了参考依据。
其中高斯核参数为,μ=0,方差σ=1.4。选择不同的高斯核函数对图像进行卷积并获得不同的结果。
方向场直接影响了Gabor滤波器的纹理匹配。将预处理的图像进行分块,以获取每个块中所有像素的梯度方向[16]。然后,将像素梯度方向上的所有向量之和作为块的梯度方向。纹理梯度的方向通常垂直于场方向,可以通过简单的变换来获得块方向场方向。
3.3 Gabor滤波纹理匹配
Gabor变换是短时傅立叶变换。实质是向傅立叶变换中添加高斯窗函数。因为高斯函数在傅立叶变换中保持不变,所以Gabor变换有时频局部化特性[17]。具Gabor有和人类眼睛同样的生物学功能,接近人视觉的频域和方向,因此被广泛应用于纹理识别。
Gabor 滤波器由两部分组成(实部和虚部),相互正交。Gabor函数的复数形式,如式(13)、式(14)所示。
式中:θ—Gabor 滤波器的方向角;λ—高斯函数的尺度参数;f—Gabor滤波器带宽的中心频率;Gabor函数的实部和虚部如式(15)和式(16)所示。
在不同的方位角、尺度和宽带中心频率下,Gabor滤波器在像面上的显示方式会有所不同。
3.4 中线拟合
Gabor滤波后得到的图像实际上是一些离散点,这些离散点主要集中在电缆纹理区域。为了最终确定电力电缆的位置,需要对这些离散点进行拟合,得到电力电缆中心线的位置[18]。在离散点的线性拟合中,最小二乘法应用广泛,既简单又实用。在XY直角坐标系中,假设线性方程,如式(17)所示。
式中:a—直线的斜率;b—Y轴的截距;a、b—带估的参数;(xi,yi)—第i个离散点的坐标。根据最小二乘法,最小化所有离散点与直线线性方程偏差的加权平方和。如式(18)所示[19]。
上面的方程可以理解为二元二次方程求极值,如式(19)和式(20)所示。
得到如式(21)所示:
整理得到方程组(22)所示。
通过求解方程可以得到a、b的最佳估计值,如式(23)、式(24)所示[20]。可以使用上述的公式,得到电力线纹理图像离散点的拟合直线,即电力线的中心线。
4 实验结果与分析
将定位算法用于三臂除冰机器人进行实验,工作状态,如图3所示。为了验证算法的准确性和鲁棒性,实验是在不同光源下进行的。首先,机器人前臂上的相机采集图像要尽可能均匀地散开,然后预处理针孔相机的球面变形。后臂相机未做球形变形校正,使用聚光灯直射相机模拟室外直射阳光。后臂拍摄越障过程同态滤波前后的比较,如图4所示。后臂滤波前后边缘检测的对比,如图5所示。前臂拍摄越障过程同态滤波前后的比较,如图6所示。前臂滤波前后边缘检测的对比,如图7所示。
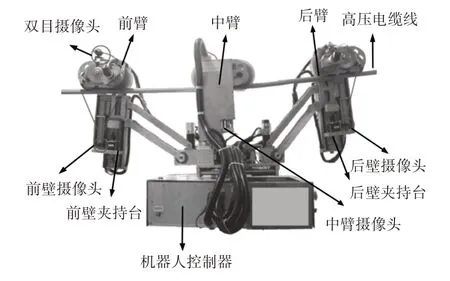
图3 三臂除冰机器人实验状态Fig.3 Experimental State of Three Arm Deicing Robot
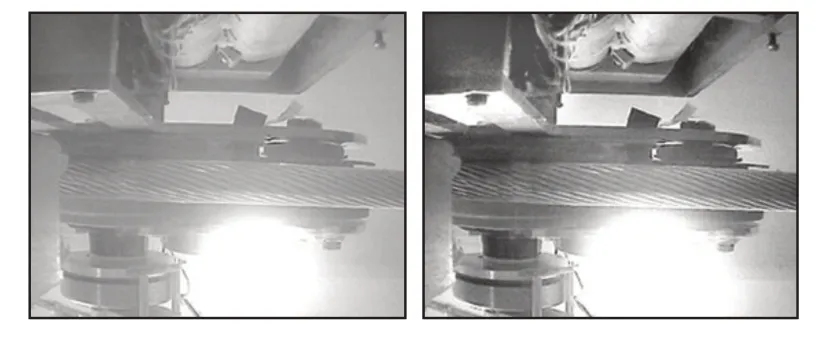
图4 后臂同态滤波前后对比Fig.4 Comparison Before and After Homomorphic Filtering of Back Arm

图5 后壁滤波前后边缘检测结果Fig.5 Edge Detection Results Before and After Back Wall Filtering

图6 前臂同态滤波前后对比Fig.6 Comparison of Forearm Homomorphic Filtering Before and After

图7 前臂滤波前后检测结果对比Fig.7 Comparison of Detection Results Before and After Forearm Filtering
如图4、图5所示,在同态滤波之后,进行边缘检测了直观的展示图像纹理的细节。同态滤波后的图像光晕得到了明显抑制,电缆纹理比未处理的图像更饱满,这也说明了图像的低频成分得到了抑制,高频成分得到了加强。
从图6、图7 中可以看到,前臂图像具有自然清晰的电缆纹理。经过同态滤波后,边缘检测会保留更多纹理细节。此外,正常光照图像中的纹理很饱满,提取的纹理非常稳定和可靠。Gabor小波模板与边缘检测图像进行卷积以最大化电缆的纹理区域,然后通过阈值划分获得图8 的处理效果。这里阈值大小为200。

图8 前后臂图像Gabor滤波后阀值分割图Fig.8 Threshold Segmentation of Forearm and Forearm Images After Gabor Filtering
比较图8中的两个纹理提取结果,可以看到正常光图像的文献较为饱满,并且提取的纹理非常稳定且可靠。而高光球面体变形的图像中,由于不均匀的局部对比度而缺失了一些纹理。在经过上述步骤后,对图像进行直线拟合结果,如图9所示。

图9 前后臂去噪前提取结果Fig.9 Extract Results Before Denoising of Forearm and Forearm
从图9中可以看到,拟合的中心线非常接近电缆的预期中心线。然而,中心线之外的一些奇异点仍会影响最终拟合结果。为了获得更准确的结果,将拟合线的垂直距离大于30像素点视为奇异点。并从原始图像中删除。执行最小二乘拟合以获取新的中心线位置,作为最终中心线位置输出。最终的拟合结果,如图10所示。
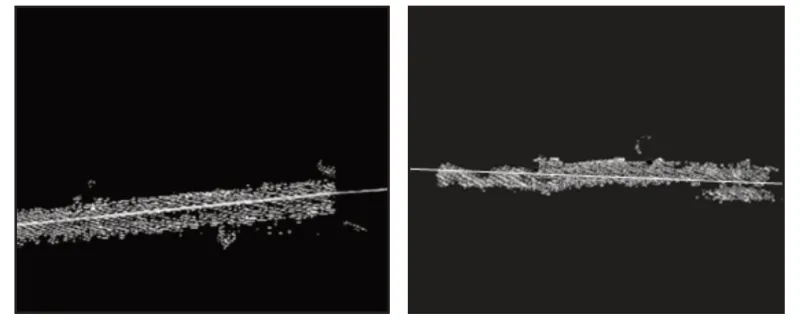
图10 前后臂去噪后提取结果Fig.10 Extract Results After Denoising of Forearm and Forearm
比较两组图像的处理结果,可以看到正常光照图像的纹理饱满,纹理提取和最终定位非常可靠。而高光度的球面变形图像中,由于局部对比度不均匀而导致一些纹理缺失,而强光会产生光晕。不仅干扰纹理提取,而且也干扰拟合,但是该算法可以相对准确地确定电缆的中心线和边界。结果表明,该算法具有良好的鲁棒性。
5 结论
给出一种用于输电线路除冰机械人的视觉定位方法,用于解决高压输电线路除冰机器人越障时机器臂对准的问题。使用Gabor变换从背景提取电缆线,然后使用最小二乘法检测电缆位置。通过不同光照度实验验证该定位方法的准确性和鲁棒性。
实验结果表明,该检测方法可以在正常光照下准确定位,在高光局部纹理缺失的条件下具有较强的鲁棒性。考虑到当前的实验设备和数据规模,仍处于起步阶段。在此基础上,下一步的工作重点是逐步改进和完善。
