航天器公路运输包装箱环境监测系统研制
2023-03-18侯京锋李亚男
侯京锋,喻 虎,王 冲,李亚男
(1.北京强度环境研究所,北京 100076; 2.中国人民解放军 63602 部队,酒泉 732750)
0 引言
航天器运输包装箱能够为卫星等航天器在公路运输过程中提供可控环境,并通过监测系统对箱内环境进行显示和记录[1-2],有效提升卫星运输的环境适应性,从而更好地掌握航天器运输过程中的状态,精简发射场检查与装调环节,缩短发射场操作周期。根据运输对象的特点[3],很多学者、工程师针对包装箱内环境及包装箱状态开发了不同的监测系统。北京理工大学智能微系统研究所娄文忠等针对常规危险品运输监测,设计小型化智能状态监测模块,并通过物联网技术实现远程监控[4]。海军航空大学李洪伟等利用计算机检测及RFID射频技术设计了用于发动机储运过程的低功耗环境监测仪[5]。针对生鲜产品,则需通过挥发性代谢产物的监测与分析,掌握物流过程中生鲜果蔬品质的动态变化[6-7]。北京空间飞行器总体设计部肖刚等利用工业组态软件设计航天器空运包装箱监测系统,实现了温湿度、振动等信号的采集显示、比对报警及存储回放[8]。
本文综合考虑卫星或相关军品运输的保密要求,以及公路运输时车速与车内振动载荷的强相关性,设计了集传感、采集、传输和存储于一体的运输环境监测系统,对包装箱内外部的环境温度、湿度、加速度和车速等参数进行监测的同时,监测包装箱内的减振平台支承刚度,并开发配套数据回放软件,以便通过对监测数据的回放来分析、评估运输任务的完成情况,为后续任务提供决策参考。
1 系统总体设计
航天器公路运输包装箱主要由箱体、减振平台和监测系统等组成,箱内环境主要指标要求为:温度(20±5) ℃;相对湿度35%~55%;运输车辆行驶速度不大于60 km/h 时,垂直振动载荷不大于0.8g。
基于状态监测、数据对比和应用交互的使用需要,监测系统的设计目标为:
1)减振前后三方向振动采样率不低于2048 Hz;
2)包装箱内外的温、湿度采样率不低于1 Hz;
3)监测减振平台的支承刚度;
4)运输车辆行驶速度采样率不低于1 Hz;
5)数据超差报警提醒并记录超差事件;
6)完整的数据保存和回放功能。
监测系统由控制器、传感器和交互设备组成,其中控制器与交互设备置于减振平台前的独立控制柜中,完成实时数据采集与判读、显示与存储,并通过触摸屏实现人机交互,包括任务启停、参数设置、数据展示及报警提醒等。如图1 所示,传感器分布于包装箱内外,并由控制器供电。三向加速度传感器A1 布置于减振平台中部,A2 布置于相应位置的减振平台下。温度、湿度测点T1 和H1 布置于箱内减振机构安装支架上,T2、H2 布置于包装箱外。系统支承刚度监测通过减振平台悬挂高度间接测量实现,在主舱底座底板的4 个角安装位移传感器进行高度监测。当位移传感器感应到平台悬挂高度变化超差时,系统发出报警提醒,提示系统支承刚度变大,油气减振器需要充压。监测测点P1、P2处于主舱内前部,P3、P4 处于主舱内后部。车速通过GPS/北斗定位模块获取,其天线V1 布置于发电机下部[9]。
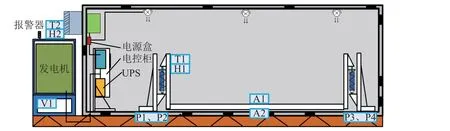
图1 监测系统传感器分布Fig.1 Sensor distribution of the monitoring system
2 硬件选型
2.1 控制器
监测系统控制器以NI cDAQ9137 为核心进行定制开发,基于加速度、温湿度和车速的采集需求,选配相应的板卡,具体如表1 所示。

表1 控制器硬件Table 1 Hardware components of controller
2.2 北斗定位模块
利用北斗模块实现车速测量。北斗模块选择山东互信智能公司出品的标准模块及天线,模块通过RS485 接口与控制器通信,控制器可周期性获取车辆的行驶速度;模块的信号采样率为1 Hz,测量分辨率为0.2 km/h。
2.3 传感器
系统配套的传感器包括三向加速度传感器、温湿度传感器和位移传感器。
加速度传感器选用上海北智三向IEPE 加速度传感器,型号14533,量程0~50g,频响范围1~5000 Hz,温度适应范围-50~120 ℃。
温湿度传感器选用建大仁科一体化墙挂型温湿度变送器,温度量程-40~80 ℃,湿度量程0~100%RH,测量精度:温度±0.5 ℃;湿度±3%RH。
位移传感器选用松下EX29 系列回归反射型光电传感器,量程100 mm,反应时间0.5 ms。
3 软件设计
3.1 整体框架
监测系统配套软件运行于Embedded Windows操作系统,基于NI LabVIEW 定制开发系统配套测量软件,整体框架如图2 所示。
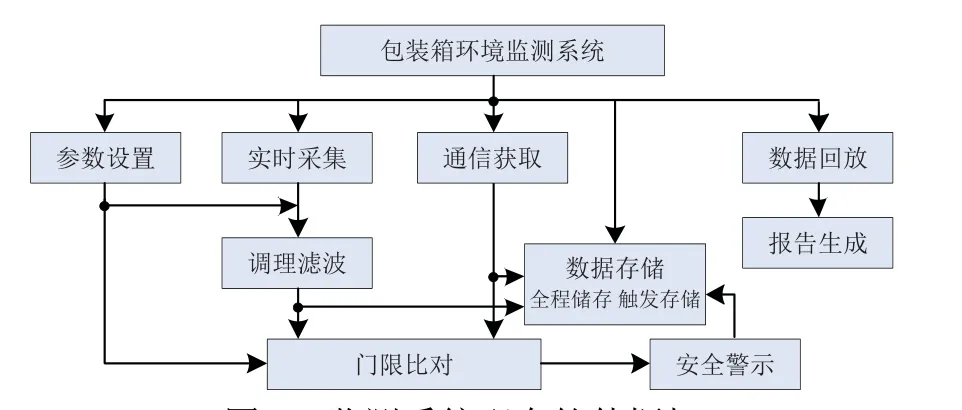
图2 监测系统配套软件框架Fig.2 Supporting software framework of the monitoring system
3.2 工作流程
监测系统配套软件的总体工作流程如图3 所示。打开软件后即进入实时采集界面,稍作等待后,自行开启采集与状态监测任务。点击“返回参数设置”可进入参数设置界面,进行各类参数设置,如采集通道参数设置、安全监测设置和灵敏度设置等;设置完成并经确认后,即可进入实时采集界面开始采集数据,并通过波形图实时显示各传感器测量值及车速计算值。系统稳定采集10 s 后,后台开始周期性地将各通道数据及报警情况进行本地存储,并在发生加速度超差时,触发高速存储超差事件前/后5 s 的测试数据。试验过程中可随时点击“停止”和“关闭”退出任务。软件具备数据回放功能,可从桌面独立进入数据回放界面,查询以往测试数据或生成试验报告。
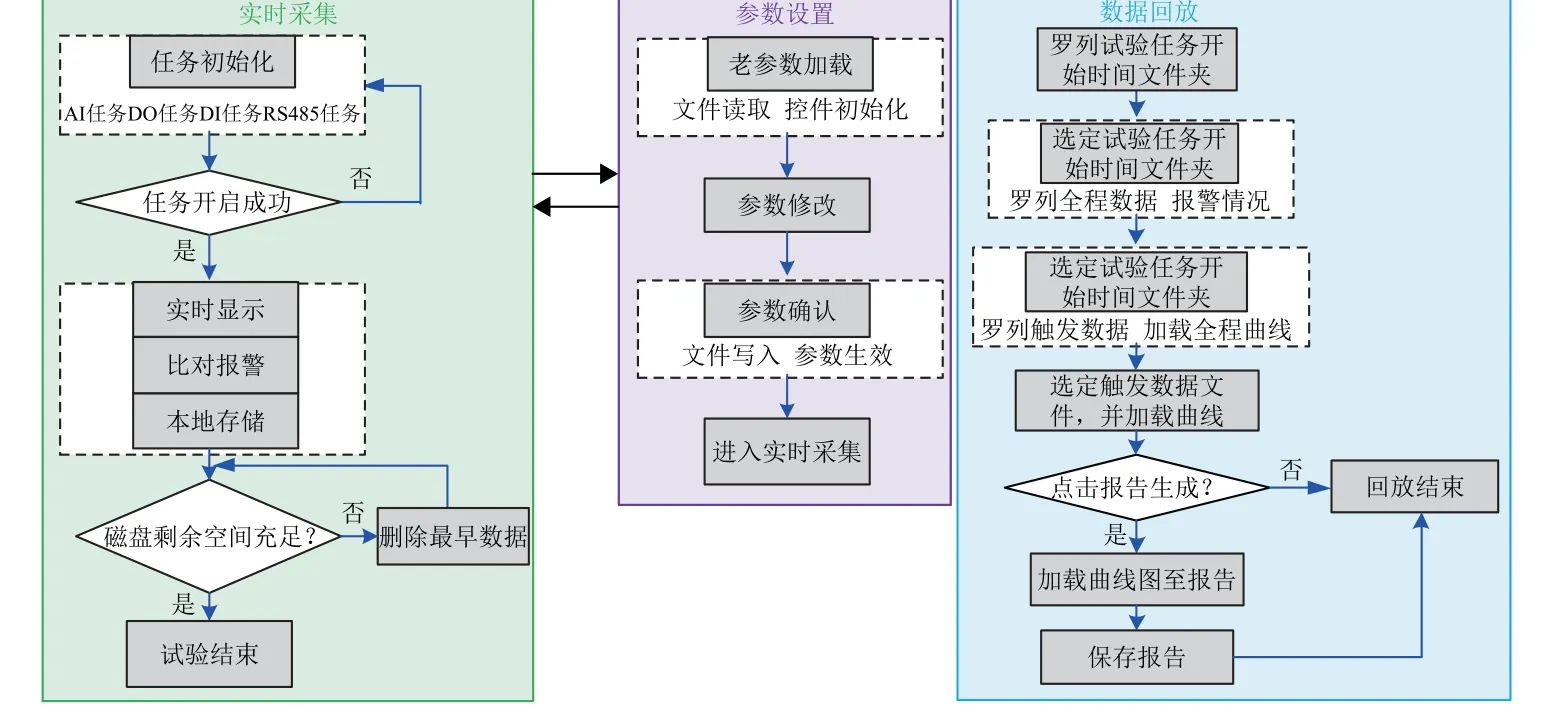
图3 监测系统配套软件总体工作流程Fig.3 Overall work flow of supporting software of the monitoring system
3.3 核心模块
3.3.1 采集模块
采集模块与硬件交互,本系统所采用的加速度模拟输入同步采集卡为NI9234。采样率fs取决于主时基频率fM=12.8 MHz,由于Σ-Δ 型ADC 自带256 倍过采样,且NI9234 模块采样率31 档可调,故其采样率设置值可由fs=fM/256/n计算,其中n表示1~31 之间的任意整数。考虑到公路运输振动载荷的带宽有限,且为了方便数据处理,本文取n=25,即采样率fs=2 kHz。
3.3.2 RS485 通信模块
控制器通过与GPS/北斗模块的RS485 通信获取当前车速[10],需确认数据传输的正确性和数据的有效性。本项目中,控制器在主动查询模式下以2 Hz的频率发送查询指令,GPS/北斗模块按照既定协议反馈当前车速,控制器收到信息字符串后须先进行CRC 校验,确认数据传输的正确性;如校验不通过,则当前显示仍为上一时刻所获取的数据值。
通过VISA OPEN.vi 打开资源,利用VISA 串口配置设置通信波特率9600、8N1、无流控制等参数以建立串口通信,软件后台周期性地向北斗模块发送当前车速的查询指令[11-12]。根据产品手册,定位模块查询命令的16 进制码为01 03 00 05 00 23 14 12,车速查询程序如图4 所示。

图4 车速查询程序Fig.4 Vehicle speed query program
通过VISA READ.vi 读取传感器返回字符串,为了提高验证效率,CRC 校验采用公式节点编程实现,如图5 所示。校验通过后,判断内容字符串中当前天线信号状态是否良好:良好则将内容字符串中的速度信息转换为无符号整形,并进一步转换为物理量;否则仍利用上一时刻的速度值。
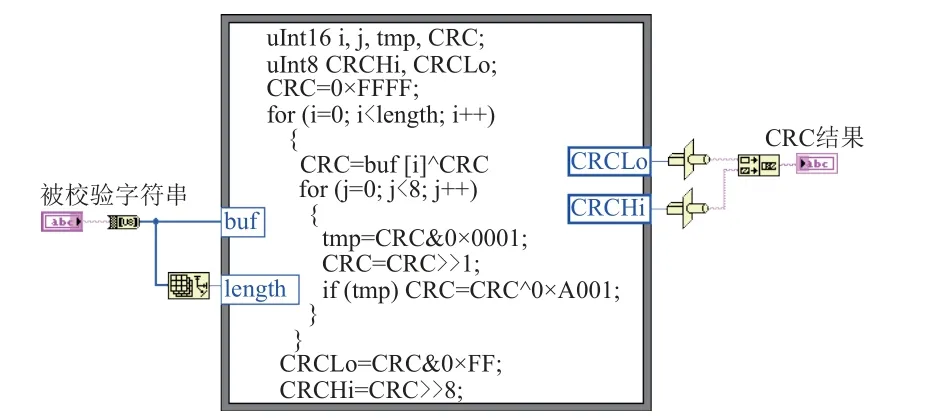
图5 CRC16 校验程序Fig.5 CRC16 check program
3.3.3 数据保存模块
为了克服加速度信号需要高速采集(采样率2048 Hz)以及全程(不短于4 h)监测记录造成的数据量过大问题,将数据记录文件设计为全程数据记录文件与报警记录文件。加速度全程数据记录频率为128 Hz,温湿度和车速记录频率为2 Hz;仅在加速度通道发生超差报警时,针对加速度信号采用2048 Hz 的高速存储[13],存储区间为超差发生时刻前/后各5 s 的数据。
存储数据按固定路径(出厂设定)在系统开始运行后在本地记录,记录数据包含开始、停止时间和采样率等基本参数,以及6 通道加速度、4 通道温湿度和1 通道车速。系统自带16 GByte 存储空间,可以连续工作4 h,全程采集数据量约为137 MByte。
每触发1 次报警,记录1 次报警数据,报警记录文件路径与全程数据记录文件存储路径一致,文件名称为“warn_文件创建时间(年月日时分秒)”。如图6 所示,触发高速存储的实现方法是:原始2048 Hz 加速度信号缓存至有损耗队列中,队列长度设定为5 s 数据量,当发生超差时,通过动态引用调起数据触发高速存储VI,该VI 内部为状态机结构,在Init 分支中通过全局变量创建报警记录文件路径及名称;在No action 分支中设计条件,队列中元素数量≥0 时,程序跳转至Store 分支完成1 帧数据的存储并计数,当累计存储20 帧数据时程序跳转至Exit 分支,结束并退出该VI。
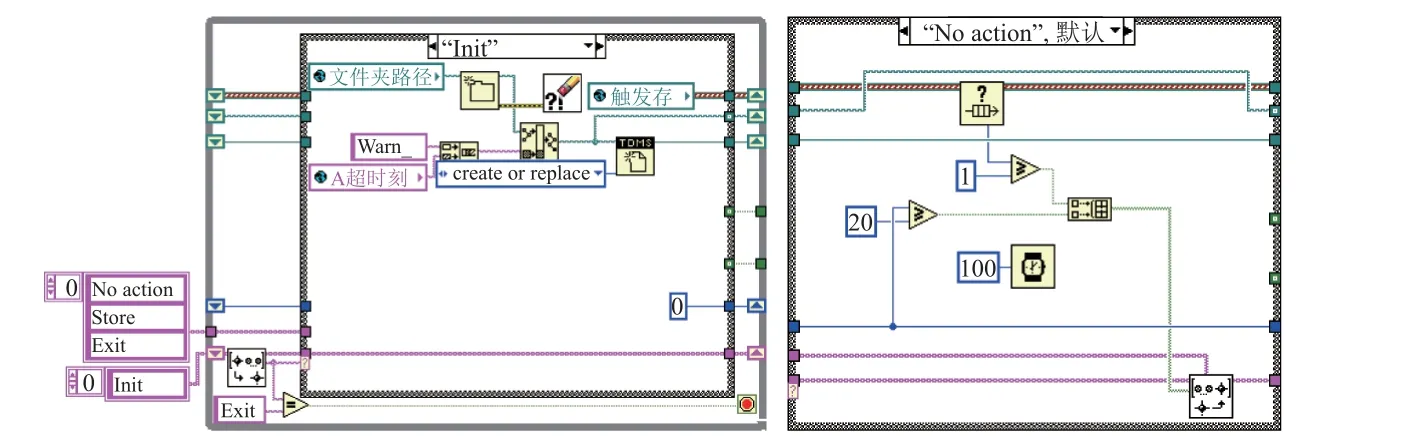
图6 数据触发高速存储程序Fig.6 Data trigger high-speed storage program
3.4 交互窗口
交互窗口主要包含实时监测与数据回放。
3.4.1 实时监测
实时监测窗口的基本逻辑如图7 所示。打开软件进入实时采集主窗口后即开始采集数据,数据以波形图和数显框2 种形式显示;约10 s 后,系统后台对所采集数据进行门限报警判断,并开始周期性地将各通道数据及报警情况在本地存储,系统默认开启全程存储与触发存储,直至试验结束或任务退出。
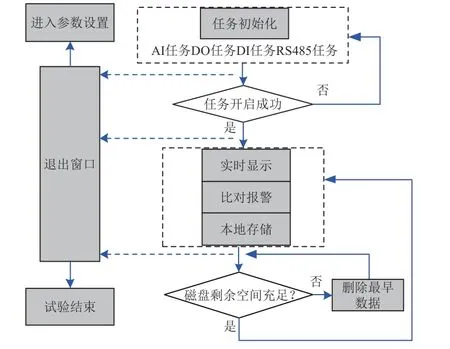
图7 实时采集流程Fig.7 Real-time acquisition process
实时采集窗口如图8 所示,窗口上部以表格形式实时展示所有模拟量,同时针对比较重要的舱内减振后数据,全程实时刷新显示当前值及历史极值,且在任一通道超过设定门限时,在表格中显示相应的位置并以红色背景亮显标注。
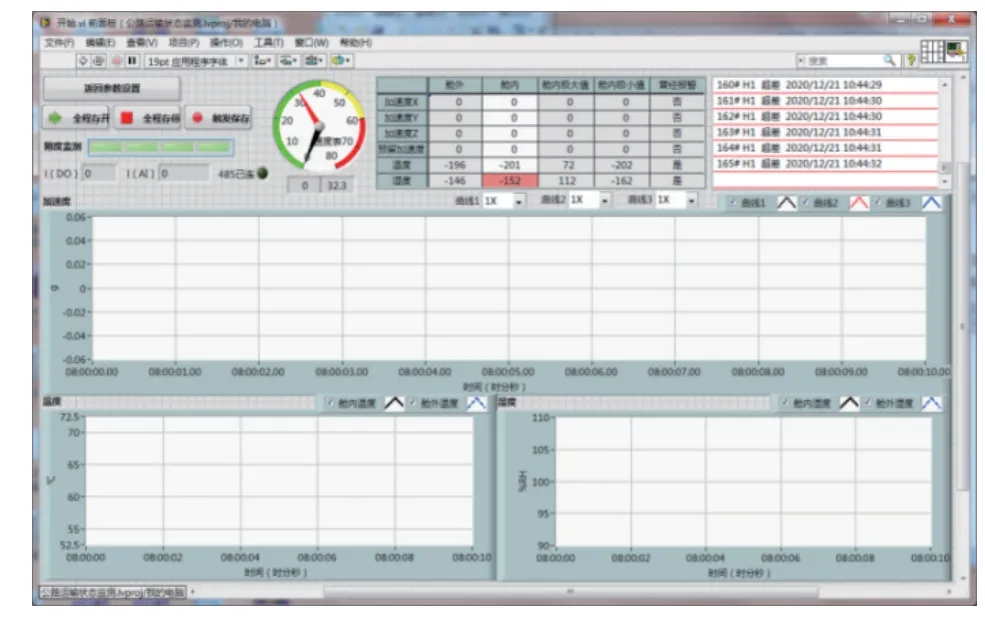
图8 实时采集窗口Fig.8 Real-time acquisition window
车速以圆形表盘的形式展示,其中黑针指向即时速度,红针指向历史最高速度。在窗口的右上角滚动显示当前发生超差的通道及相应的发生时间。窗口中部为加速度数据波形显示框,下部分别为温、湿度数据波形显示框,所有波形显示框恒定展示过去10 s 的数据。
3.4.2 数据回放
当软件进入数据回放窗口,系统在默认路径下将历次试验任务以时间顺序表格展示,操作人员可点选某一时间的文件夹,系统将立即展示该时间文件夹下的历次全程试验任务数据。若点击某次的全程数据文件,该次试验的所有通道全程数据将自动在后台加载,并可以表格和波形图的形式显示;同时加载的还有该次试验任务的报警情况及触发高速存储数据的列表;如点击任一触发数据,则该数据被加载至触发显示区域,以表格或波形图的形式显示。在数据回放窗口中可生成试验报告,针对某次试验任务的统计结果将以表格的形式首先展示在试验报告中,报告中的附图均可通过数据回放软件自由粘贴。
4 现场实测
4.1 工况介绍
对该航天器公路运输包装箱环境监测系统进行卫星转运真实路况的现场测试,基于覆盖卫星产品质量范围的考虑,采用不同质量的模拟负载进行测试,模拟负载及加速度传感器均定义竖直向上为+z向。
4.2 测试情况
测试完成后利用配套软件进行数据回放的结果如图9 所示,窗口展示了包装箱内湿度变化曲线和减振后某次加速度超差时的前/后各5 s 加速度波形。由图可见,数据及报警情况记录完整,回放功能完备。
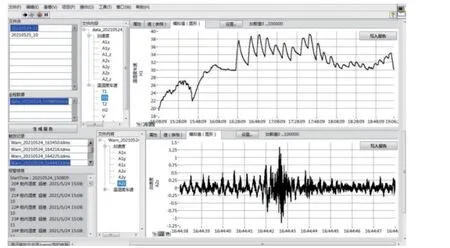
图9 数据回放窗口Fig.9 Data playback window
4.3 结果分析
全程4 h 的加速度时域数据如图10 所示,A1_z(红色)和A2_z(蓝色)分别为减振前、后的z向加速度变化曲线,全程数据记录采样率为128 Hz;绿色为车速的变化曲线。可以看出,车辆在通过颠簸路段或减速带时进行了主动减速,同时相应的颠振加速度值变大;对比红/蓝色曲线,也可以明显看出包装箱的减振效果显著。
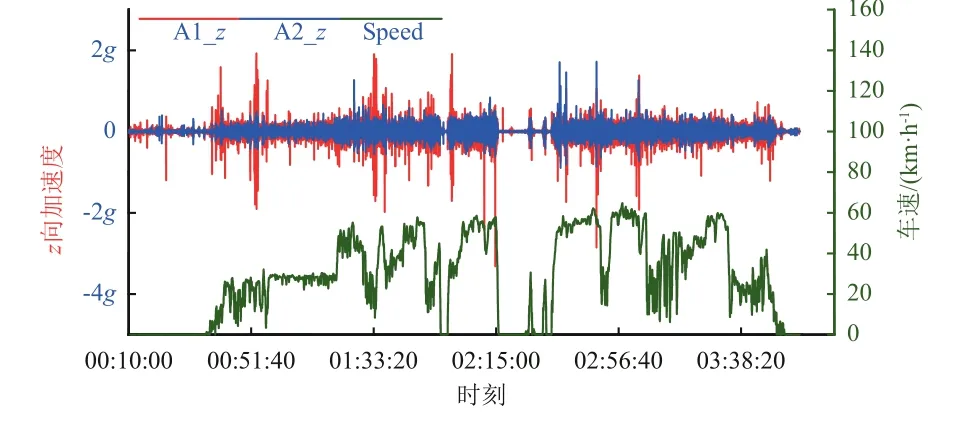
图10 z 向加速度与车速的时域变化曲线Fig.10 Time domain variation curve of z-direction acceleration and vehicle speed
图11 为包装箱内温、湿度变化曲线,可以看到,大部分时间段内,舱内温度处于21 ℃附近,湿度在35%RH左右;相对舱外,温度降低了5 ℃左右,湿度提升了25%以上。图中02:30:00 附近处,舱外温度明显升高,这是由于车辆在丁字路口掉头,车身外的温度传感器处于阳光直射下造成的。
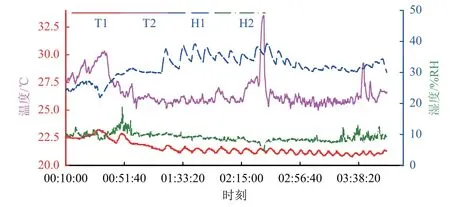
图11 包装箱内温、湿度变化曲线Fig.11 Variation curve of temperature and humidity of the packing cabin
5 结束语
本文设计航天器公路运输环境包装箱监测系统,基于NI 软硬件平台搭建硬件系统,设计软件流程,开发配套监测和数据回放软件,实现加速度、温湿度和车速多种类型信号的实时记录与实时超差报警。经道路实测,该监测系统设计功能完备,运行稳定可靠。后续软件可集成加速度信号的频域分析功能,便于评估减振效果;也可在硬件上完善物理量监测,如增设与海拔密切相关的气压监测等。
