攀钢白马铁矿下行皮带机控制系统设计
2023-03-17胡春明徐建国余鸿程唐茂钦
胡春明 徐建国 余鸿程 唐茂钦

摘 要:攀钢白马铁矿废石排土系统下行皮带在启动、加速、减速、停车及张力变化过程中,均呈现出复杂的运动力学特征,主要表现为横向、纵向振动及动态张力波在皮带中的传播和叠加,由此会造成皮带机的不稳定。基于此,针对下行皮带运行特点,通过运行分析,设计了一套由四象限变频器和PLC组成的皮带机运行控制系统,并设置了皮带机启动的速度给定优化S曲线优化给定功能块。系统通过两年的运行,安全稳定,没有发生过飞车故障,达到了皮带机安全、节能、稳定运行的效果。
关键词:下行皮带;四象限变频器;优化S曲线;控制系统设计
中图分类号:TD528.1 文献标识码:A 文章编号:2096-6903(2023)11-0043-02
0 引言
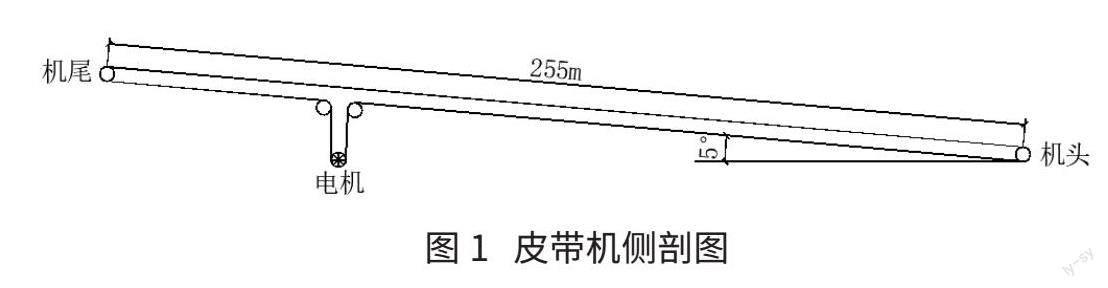
攀钢白马铁矿废石排土系统由9条皮带机组成(B1~B9),其中#1皮带机是下行皮带机,单边长度255 m、宽度2 m、带速2.5 m/s,下降坡度为5°。整条皮带机全程装有打滑、撕裂、一级跑偏、二级跑偏、拉绳等安全联动保护装置,皮带机采用单电机驱动,电机额定电压为AC380V,额定功率为160 kW,额定转速1 485 r/min,电机配1/40减速机、液压盘式制动器,液压泵运行打开制动器,液压泵停止关闭制动器,油压不用比例阀控制,电机配有光电码盘检测带速。
皮带机是柔性力学系统,具有明显运动力学特征,在启动、加速、减速、停车及张力变化过程中均呈现出复杂的运动力学特征,主要表现为横向、纵向振动及动态张力波在皮带中的传播和叠加,由此造成皮带机的不稳定。具体表现为皮带斷裂、机械损害、叠带、撒料、局部谐振跳带等。下行皮带机比较特殊,容易发生飞车事故[1],故控制比较复杂。皮带机侧剖面见图1。
1 皮带运行原理分析
皮带机为柔性系统,若直接启动,会造成机械损害、皮带机断裂及物料滑落等问题。因此,通常采用变频器拖动,即斜坡启动方式。另外上下游皮带的物料流量匹配也需要调速。
下行皮带机运输机空载运行时,上层皮带机向下运行,下层皮带机向上运行,上层皮带机和下层皮带机的重力分量大小相等方向相反,阻碍皮带机运行的只是皮带机摩擦力,电机驱动力克服阻力就带动皮带机运转。当驱动力和阻力平衡时,下行皮带机运输机恒速运行,空载启动和恒速运行时,能量从电网经由整流回路和逆变回路流向电机,电机处于正转电动状态,变频器工作在第一象限。下行皮带机运上矿石后,矿石的重力沿皮带机传输方向的分力作用在驱动滚筒上,驱动力矩是矿石重力分量、皮带机阻力和电机电磁力矩的合成[2]。
在加速阶段,当皮带机运行速度小于设定速度时,电机电磁力矩与皮带机运行方向一致电机处于正转电动状态。当皮带机速度大于设定速度时,电机电磁力矩与皮带机运行方向相反,电机处于正转发电状态,变频器工作在第四象限。当下行皮带机匀速运行时,矿石的重力分量等于阻力和电机电磁力矩之和,电机处于正转发电状态。因此选择变频器时,必须具有四象限功能[3],将皮带机重载下行过程所产生的电能回馈给电网,有效节约电能损耗,保证皮带机不超速飞车,平稳运行。
皮带机正常启动时,皮带机上是没有物料的。停止时,物料跑完才停机。有时紧急停车时,若皮带机上带有物料,需要重载启动。重载启动时,变频器给定零转速,制动器打开,变频器产生电流,在电机中建立磁场,产生的电磁转矩和矿石的重力分量相等,皮带机保持静止状态,这就是零速转矩功能。变频器必须具有零速转矩功能,零速转矩功能有效防止了皮带机重载启动的溜车现象,是皮带机安全运行的重要保障。
皮带机在匀速运行时需要闭环控制,零速转矩和匀速运行均需要速度反馈,来检测电机的转速,因此变频器必须具有接入光电编码器信号的接口,并带矢量闭环控制功能。
2控制系统设计
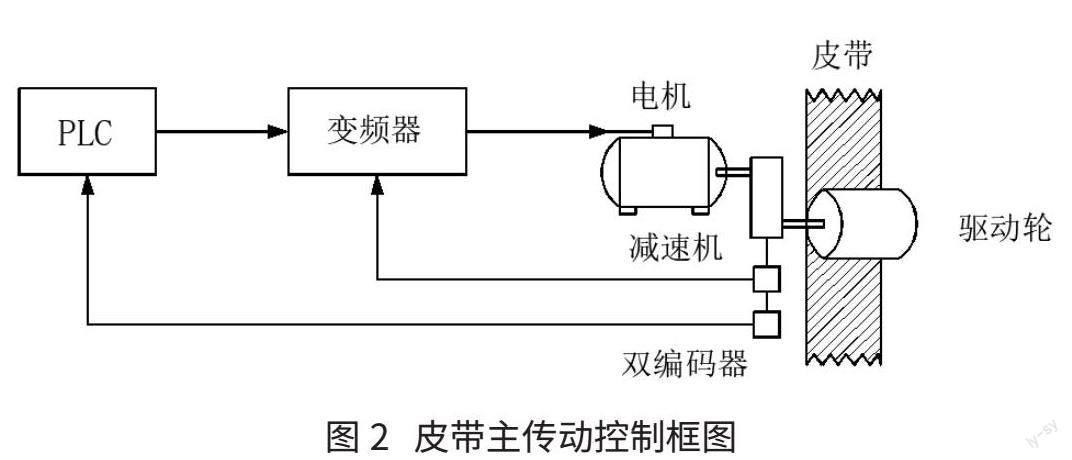
下行皮带机电机采用380 V、四象限带能量回馈功能的变频器拖动,由单独一套PLC控制,PLC与变频器的通信采用PROFIBUS-DP通信。皮带主传动控制框图见图2。
白马铁矿废石排土系统由多条皮带机组成,皮带机长短不一,长的800多m,短的100 m,设计了多个电气室为皮带机供电。一个电气室为一条皮带机或几条皮带机供电,每个电气室单独设置一套PLC。PLC采用西门子的S7-300,设置两个操作站,操作站布置在调度室,操作站与PLC之间采用光纤环网通信。PLC与PLC之间的联锁采用通信方式[4],采用PUT/GET通信,PUT/GET通信简单,但是不能保证信号实时性和判断通信是否正常,因此在通信数据内增加了时钟信号,用看门狗来判断通信是否正常,以保证联锁正常。PLC与变频器之间采用PROFIBUS-DP通信,编程软件采用博图V16,监控软件采用WinCC7.4,程序按一键启停设计,在关键点均设置了视频监控,现场、各电气室不设巡检人员,整个系统做到无人值守,一键启停。
3皮带机的运行及优化
3.1 皮带机的起停逻辑
皮带机的启动流程为:先检查皮带机是否正常,如果没有报警和故障时,按下启动按钮。启动变频器,输出电流到电机,建立磁场,产生电磁转矩。打开制动器,由于频率设定为零,皮带机保持静止状态,制动器打开到位后,变频器按优化S曲线升速,速度升至设定值后,恒速持续运行。
皮带机的停止流程为:当按下停止按钮或皮带机发生停机故障时,变频先按优化S曲线减速,速度减至零。等皮带机静止后,关闭制动器,制动器关闭后,停止变频器运行,逆变器关闭,皮带机停止。当变频器发生故障时,变频器的输出全部封锁,变频器没有电流输出,电机没有电磁转矩,只有变频器发生故障,立即关闭制动器,皮带机立即停止。上下游皮带机正常停机的联锁是上游皮带机停机且当前皮料流跑完不带料时,停止当前皮带机。正常停止时,从上游到下游皮带机依次停机,全部停止后,所有皮带机不带料。故障停机时,当前和上游皮带机都停止,通过优化S曲线减速,当前和上游皮带机差不多同时停止,皮带机带料,皮带机的下料斗不堵塞。皮带机启停流程见图3。
3.2 皮带机的速度控制优化
皮带机由弹性单位组成,皮带机是柔粘性力学系统,具有明显运动力学特征,在启动加速、停车减速及张力变化过程中均呈现出复杂的运动力学特征。主要表现为横向振动、纵向振动以及动态张力波在皮带中的传播和叠加,由此造成皮带机的不稳定。具体表现为皮带断裂、机械损害、叠带、撒料、局部谐振跳带等。
为了抑制张力波及其有害传播,保证皮带机安全运行,必须对皮带机动态过程进行分析和控制。这不仅可以使皮带机在优化的工况下安全运行,保障生产,有效延长其使用寿命,还可以通过控制工作张力和启制动加速度,优化皮带安全系数,节省设备投资。
根据皮带机的运行特点,绘制了皮带机启动的速度给定优化S曲线,速度给定优化S曲线图见图4。皮带机运行的速度给定优化S曲线,是皮带张紧、加速、匀速、减速控制的关键。启动过程分为皮带张紧和皮带加速两个阶段,张紧阶段分又分预张紧和张紧两个阶段。预张紧阶段是从皮带机开始启动,在t0(一般设为10 s,可以根据皮带长度增减)时间内速度从0匀速增加至频率f1(一般设定5 Hz),电机通过减速机带动滚筒,滚筒带动皮带运动,皮带带动托辊运动,皮带机运动像波一样从滚筒开始向远处传播。当t0时间后,皮带机速度达到f1这后,再以f1速度运行t1-t0的时间(一般设为5 s,可以根据皮带长度增减),确保皮带张紧并以f1的速度匀速运行。皮带进入加速段,皮带机用t2~t1的时间(根据皮带长度设定),从速度f1以反余弦曲线增速至设定速度f2,然后皮带机匀速运行。正常停机减速的曲线是加速曲线的镜像,先按反余弦曲线减速至f1,以f1的速度运行t1~t0的时间,再用t0的时间斜坡减速至零。故障停机的曲线与正常停机的曲线一致,只是时间只用1/10,正常停机要60 s,故障停机只要6 s,变频器发生故障時,速度立即设为零。
4 运行效果
该系统在白马铁矿投产后,运行了两年,系统安全稳定,没有发生过飞车故障,变频器四象限运行回馈了一部能量。结果表明:系统性能先进、可靠性高、运行稳定,操作简单。
参考文献
[1] 林富其.下行皮带机“飞车”故障原因分析及对策[J].电工技术,2011(11):43.
[2] 王万弘.石灰石矿下行皮带驱动用异步电机安全节能运行分析[J].新世纪水泥导报,2017(5):70.
[3] 坚德毅.ACS800四象传动系统在下行皮带中的应用[J].电气传动自动化,2012(5):29.
[4] 崔坚.西门子工业网络通讯指南[M].北京:机械工业出版社, 2006:122.
