UWB定位应用综述
2023-03-16贵州健康职业学院郭永强于喜志黄晓芬田太权杨俊
贵州健康职业学院 郭永强 于喜志 黄晓芬 田太权 杨俊
本文根据UWB通信基础介绍了常规TOA、TDOA、AOA等算法的理论基础以及定位原理和方法,以及算法的优势和不足;同时介绍了影响算法的视距和非视距鉴别问题和影响因素。根据研究文献资料介绍了几种鉴别视距和非视距问题的模型,同时阐述了非视距模型的测量指标,而后对于定位的扩展应用的三维定位问题进行研究介绍,最后对UWB应用进行了阐述。
随着家居智能化以及自动化智慧工厂的建立,室内定位精确度要求提高。为满足定位精度室内定位的研究,主要着手点在利用Wi-Fi、ZigBee、Bluetooth、RFID等来实现室内无线定位;随着超带宽(Ultra-wideband, UWB)无线载波技术的发展,UWB定位的研究方法增多。UWB在2002年应用于民用规范[1],其应用频率宽,相对带宽较大,发射功率低于1mW[2]。同时定位精度高,抗干扰能力及穿透能力强,能耗低而受到关注[3]。
UWB[4]的应用源于Scholtz的脉冲调制的论文[5],UWB具有抗多径和时间分辨敏感的特性[6]。因兼具定位和信息传递功能应用得以扩展[7]。应用的研究主要集中在解决多径和非视距问题,Lee等[8]提出的基于直射路径的信号首次接收时间确定问题,依据UWB信号的特点反映出在视距情况下直射路径的信号强度最强,该方法易于接受和理解,得到了推广应用。Cassioli等[9]研究关于复杂环境下的非视距问题支出在非视距环境下直径距离测量值不再是最强路径,这增大了直径测量的难度。因Guvenc等[10]提出此针对非视距环境下的路径问题需要特殊的加以甄别。
1 UWB超带宽算法简述
超带宽定位算法在获取信息时主要是根据时间信号来确定,依据时间和信号角度等可以划分为:接收到标签信息的时间(Time of Arrival,TOA)、接收到信息的时间差(Time Difference of Arrival,TDOA)、信号的往返时间(Time of Flight,TOF)以及接收到信号的角度(Direction of Arrival,DOA)或(Angle of Arrival,AOA)等[11,12]。
(1)TOA算法:TOA算法是利用基站接收到标签的信息时间进行计算[13]。该算法在应用时至少需要3个基站协同工作,同时也要保证标签和各基站之间的时间同步。
在进行距离测量时,依据算法公式(1)和公式(2)求解得出标签的坐标位置(x,y):
其中基站设备坐标分别为(xi,yi),被测量标签的坐标为(x,y)。R为标签到基站的距离半径。
从算法的测量参量分析可知该算法的定位精度严格依赖于距离R,与此同时标签和各个基站之间的时间保持高度同步,而面对不同的环境和硬件设备有不同的影响程度;同时也有时间建立方程固有的非线性问题[14]。
(2)TDOA算法:TDOA算法是以标签信号到达基站的时间差来进行计算,该算法相比TOA主要在于标签不必与各基站保持时间的同步,各个基站时间必须是保持同步。标签到达主基站和参考基站两基站的时间差为Δt,标签到达两基站的距离差D=Δt×C为定值。基站坐标为(xi,yi);设标签节点的坐标为(x,y);D为标签到基站的距离。建立方程组如式(3)所示:
由此可以解算出标签坐标,同样该算法的测量精度依赖于基站之间的时间同步,要保证测量数据的精确度就要保证基站间时间的同步问题。
(3)TOF定位算法:TOF(Time of Flight)定位算法即计算信号从标签到基站之间的往返时间的计算方法,该方法是一种测距的方法需要结合其他模型方法(例如三边定位算法)来进行辅助计算。该算法特点在于对于基站和标签之间的时间同步问题未作要求。基站经过Ttat的时间处理信息,定位标签从发送信号到接收到应答信号经历了Ttot的时间,那么定位信号往返定位标签和基站之间的时间为T=(Ttot-Ttat)/2,则标签和基站之间的距离D=C×T(C为电磁波在空气中的传播速度)。该方法的测量精度也依赖于时间测量的精度[15,16],由于基站和标签之间不必严格时间同步,因此算法的应用进一步扩展。
(4)AOA定位算法:AOA(Angle of Arrival)算法是信号到达角度进行定位算法,算法是利用基站的天线阵列或者明确方向的天线来进行测量标签信号到达基站的角度和距离信息,求解几何信息来计算标签的位置坐标,角度θ1,θ2为标签信号到达基站的角度,设基站坐标为(xi,yi);标签的坐标为(x,y)。根据几何关系可得如式(4)所示:
即可求得标签的位置坐标(x,y)。由于涉及到角度和时间的两种数据的测量,所以信号也容易受到环境因素(例如环境复杂度和非视距因素)的干扰[17],因此在测量时需要高精度的天线阵列或者方向天线。
综上所述UWB定位中算法的基本原理和方法,目前研究资料可知,在实际应用中受复杂环境因素的影响、硬件设备性能限制、算法本身局限性等因素,仅凭单一的算法无法实现精确定位。因此研究者们想通过一种或多种基本模型算法的优势互补来进行尝试以提高精度,减小干扰因素的影响。依据时间的依赖性分析是否要求严格同步总结如表1所示。
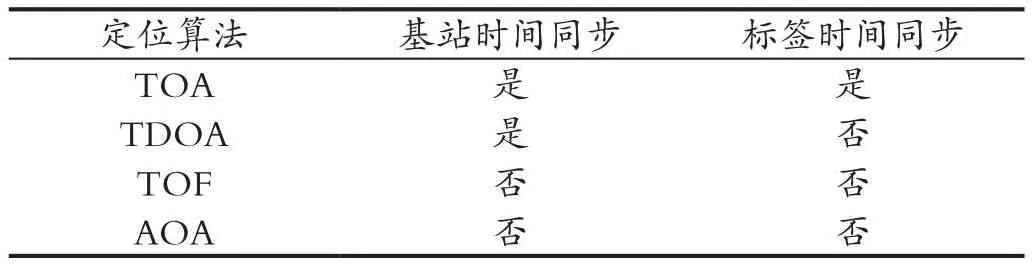
表1 时间同步关系Tab.1 Time synchronization relationship
闫雷兵等[18]提出了结合TDOA和AOA算法的定位研究,该方法主要针对当测量到的距离到个基站相等或近似的情况下的计算求解问题,由于测量距离相等或相近在求解时利用两步加权最小二乘算法和约束加权最小二乘算法会出现测量矩阵的奇异性,解决了圆形阵列中的移动标签定位时出现测量矩阵的奇异性问题。提出利用约束加权最小二乘法的基础上加以分离变量进行避免求解困难的问题,同时本身的价值函数的重构也表现出特殊的重要性。该方法不仅优化了TDOA和AOA的测量数据,也可优化引入的附加变量中的定位数据。高健等[19]采用三次通信的TDOA和TOF结合的方法有效地提高了测量精度弱化测量时双曲线抖动的问题。张怡等[20]利用两次卡尔曼滤波进行非视距情况下的TDOA/AOA的混合定位研究。利用类正态分布在最小二乘法下的拟合建立TDOA的误差模型处理非视距的问题,而后利用卡尔曼滤波方法对混合定位。同时对比了利用TDOA算法和静态下泰勒级数展开下的TDOA和TDOA/AOA的预算结果,表现出一定的优势[21]。
UWB测量算法模型:以上定位算法的测量过程中涉及时间和路径的问题,主要是基于能量或者是信号的多径和非视距问题。信号的监测有基于信号强度(Signal Strength Indicator,RSSI)的测量和利用UWB时间分辨率的TOA/TDOA等两种类型。
RSSI是基于能量信号传播衰减模型的测量模型,本质上是距离的定位方法[22]RSSI模型的设计定位时要求距离满足条件,如式(5)所示:
其中节点距离d,路径损耗np,σsh零均值高斯随机变量标准差,对数表示正态的衰落,该模型适用于参考基站和目标比较接近的环境下,因受实际应用环境的限制,算法的鲁棒性不强,具体体现在式中的距离关系。
TOA/TDOA的UWB时分辨的信号测量在视距和非视距环境下遵从电磁波信号的直达和多径问题。多径信号是电磁波信号在传输路径上经过周围物体的反射或者散射形成的信号叠加现象。在视距情况下直达DP成分容易监测,复杂环境下的DP信号难以检测,进而引起非视距环境下的非视距(NLOS)检测的误差。如式(6)所示为常规TOA信号检测模型。
其中C为光速,PRN、PUN为节点位,||PRN-PUN||表示节点间距离,ηMP径误差,eNLOS为非视距误差。
建模应用过程中对误差有不同的模型建立,在UWB信号的接收过程中多径的影响造成DP成分的延迟或者误检。该模型建立的多径误差模型ηMP为高斯模型,如式(7)所示:
μMP、σMP为ηMP的均值和标准差,ηMP有正负偏差,假设μMP→0,引入参数λd对数距离,改写ηMP如式(8)、式(9)所示:
而实际环境中UWB信号在复杂环境中的传播有不同的特性,信号的传播路径是非视距的,DP衰减很快,造成接收信号的延时,对于NLOS环境下的信号测量引起NLOS误差。其误差模型选用指数模型较为理想,如式(10)所示:
其中μNLOS为指数分布均值,则ηMP的改写描述定位误差如式(11)所示:
其中w为权重因子。
从现有文献资料分析在不同模型中建模误差,模型有所不同,非视距的延时检测,误差通常表现为正误差,符合高斯分布的特征,表现为正均值。根据以上的分析可知非视距的情况下会引起TOA估计的误差,在实际的应用环境中找到适当的方法鉴别视距和非视距就显得尤为重要。
2 视距鉴别方法
在NLOS环境下的TOA误差较大,鉴别非视距用于修正误差提高精度是很重要的,在移动互联网中鉴别时NLOS常用来以二元假设来进行判断。在UWB的应用过程中通过分析信噪比来鉴别视距和非视距的情况,分析TOA的误差也是同样可以做到的。那么在视距环境下的直接路径和最强路径是统一的,定义直接路径的幅度值。在视距环境下的直达路径和最强路径相同归一化其值[10]为如公式(12)所示:
在非视距环境下直达路径有时不表现为最强路径或者最强路径测量指标不明显。在视距和非视距环境下的幅度值不同,肖竹等[23]的仿真实验结果也表明了该研究的观点,说明多径分量的幅度值可以用来鉴别视距和非视距的情况。
2.1 最强路径模型
在视距和非视距的情况下,直达路径能量和多径信道能量分布的不同,可以依据能量分布情况进行视距和非视距的鉴别,定义最强路径的能量与信道能量值的比值如式(14)所示:
其中ξ是最强路径的归一化值,λSP与ξ的大小关系表明是视距或者非视距的情况。视距情况下的直达路径和最强路径相同,表现为主要能量集中,在非视距情况下主要路径能量不集中,表现不明显的最强路径,而区分的界限值归一化值也是影响判断的重要因素。
2.2 峭度
峭度反映的是随机变量分布的数值统计特征,是数据集合归一化的四阶中心矩,反应数据的峰度值大小状况,四阶距表示峰度,二阶矩表示方差,陡峭度实际上反映的是数据的集中凹凸的程度,如果数据越是集中K值就越突出,表明其有更突出的峰值。那么在UWB通信的过程中依据其特性,如果K值越大则表示其为视距的概率就越大,K值越小表示为在非视距环境下的概率就越大。对于特定的信道峰度κ如式(15)所示:
其中μ|h|、σ|h|是|h(t)|的均值和标准差,h(t)是信道,κ的表现能够体现在LOS/NLOS的信道特征,通过建立正态分布模型检测κ值有不同的置信度值[24],如式(16)所示。
其中μκ、σκ是κ的均值和标准差。
表明无论是在实验室还是在实际环境下,在视距环境下的K值都明显大于非视距下的值κ。
2.3 延时测量指标
依据上文的分析,从能量的角度出发显示并未体现UWB的时间分辨特性,从平均超量延时(MED,Mean Excess Delay)和均方根延时扩展(RMS Delay Spread)表现了多径分量的时间分辨特性。通常情况下的MED和RMS在NLOS环境下和LOS环境下有着明显的区别,两个测量指标可表示为如式(17)所示:
其中τMED,τRMS也符合对数正态分布,在相同的环境下不同的τMED,τRMS值用于鉴别视距和非视距。结合通信标准数据分析[24]实验数据表明这点。
结合以上分析:在LOS环境下的能量SP最大可以认定为DP。在延时测量指标方面依据UWB的传播特性,非视距环境下的MEN和RMS比视距下的限量要大,符合信号最强路径直接传播时间最快,反射和散射接收到的信号必定带有延时特性,并且依据延时量和均方根有直接的反应。陡峭度的概念更契合与四阶距的峰度定义,也符合正态分布中的越是集中概率越大的概念。
3 数据融合UWB定位算法
定位环境的复杂性逐渐应用于三维的定位中。单一的UWB定位表现出了一定的局限性。因此逐渐将传统的定位数据与UWB相结合,实现硬件设备的互联复用,同时加强了数据融合的研究。
三维UWB室内定位中孙建强等[25]使用气压计辅助UWB进行室内定位方法的定位精度可以控制。定位方法应用三边定位法,利用三个基站一个移动标签;测距运用双边双向时间差,基站和移动标签无需时间同步,减少了时间不同步造成的误差。但是要实现三维测量在每个楼层之间还是需要三个基站。该方法特点在于实现3D定位的方法,三维依赖的是气压计来处理三维问题,给处理三维问题带来了一个新的思路,是具体到每个层次的定位依然依靠的是三点定位,同时在基站的应用方面实现准确的定位也避免不了多基站的应用问题,也未考虑在应用过程中信号衰减和非视距鉴别等数据问题。
李世银等[26]基于SAE-RF的三维UWB室内定位方法研究运用指纹定位算法进行3D定位,具体定位方法为以UWB的测距作为指纹采集方式,利用稀疏自编码器(SAE)提取指纹的相关特征,而后利用随机森林(RF)进行误差修正,特别是在构建SAE-RF时为了避免SAE在低维度数据输入时隐含层神经单元过多导致的精度下降问题引入了对隐含层数据单元的稀疏性限制。对于多余的数据进行Dropout方法[27]处理。该算法的特点在于运用系数矩阵和RF回归模型修正误差数据,高度精确的准确性来源于指纹定位数据的建立和指纹匹配,所以只是利用了UWB作为指纹数据的采集,没有利用UWB信号的信息多样性,数据处理方面的非视距和多径问题未做说明性的研究。
张宝军等[28]基于DL-LSTM的UWB /INS室内定位算法的研究中利用惯性导航和UWB结合的方法进行定位研究。鉴于长短期记忆神经网络[29-31](LSTM)根据设置不同的振幅和相位数据可以学习到更加深层次的特征而提高预测定位的精度。双层LSTM模型可以抑制UWB定位中的非视距误差[32]。该方法运用的惯性导航结合UWB的算法,用比较常规的技术手段解决UWB的非视距误差修正,为处理过程的归一化提出了较大误差,从数据表示来看仿真效果较为理想。在处理室惯性导航数据的误差积累和随时间的漂移问题[33]未得到严格的控制,进而影响到惯性导航数据的准确性,而在数据融合层,主要依据的还是距离的测量值,鉴于最小二乘法数据标定模型本身的线性问题,其数据值选取和前期处理如何得以保障可靠性需要深入处理才能够得以应用,确保数据模型的准确性。
基于通信技术的无线传感网络技术[34]转而对其带宽特性的定位研究,研究对象多在于NLOS的误差处理;盛坤鹏等[35]非视距误差改正的超宽带定位模型研究。曾玲等[36]研究表明非视距对移动标签的影响问题有助于解决室内移动定位的研究。闫雷兵等[20]研究了移动标签位于矩阵中心时的求解奇异矩阵的情况。基于以上分析,重点的研究目前还是在寻找合理的数据处理方法来解决非视距现象带来的干扰问题,总体思路还是鉴别估计运算和多径问题。
4 结论
本文介绍了UWB通信的理论基础和方法,分析了TOA、TDOA、TOF和AOA的基本算法,以及两者或者多种定位基础算法相结合的定位原理和定位方法,介绍其影响的主要因素。阐明了TOA、TDOA的严格要求基站时间同步的问题,以及双向时间监测TOF及算法的进一步扩展和标签与基站的时间同步。在模型确定时分析RSSI模型,陡峭度模型,超量延时的数据信号的分析问题,鉴别视距和非视距的信息处理,重点在非视距的鉴别和数据运用,同时介绍了多数据融合的定位应用。基于气压计的三维UWB定位扩展应用,利用气压计减少三维定位中的多基站的问题,减少了相对成本,但是具体定位时的非视距问题和信号损耗,基站时间同步等数据问题未做详细的处理;以及记忆神经网络的问题,对非视距做阐述运用惯性导航修正数据解决误差问题,惯性导航的本身数据的误差积累和漂移问题值得注意;以及数据标定的最小二乘法本身模型的线性关系在实际应用中并不适用。指纹定位的方法,将前言经验方法运用到UWB的过程中利用稀疏编码建立指纹库,同时考虑到非视距环境的非线性关系进行回归修正,表明效果较好,但是指纹库的模型建立以及UWB信号的采集需要更加关注,能够运用到准确的测距信息。UWB定位技术已经应用到室内定位、空天相机位置追踪[37]、无线网络通信应用、感知物体信息[38]、医疗成像研究[39]、深井和恶劣环境便携设备等现实应用领域[40,41]。因其具有良好的通信特带宽,时分辨特性,结合硬件辅助设备实现便捷低功耗,同时降低应用成本问题,表明今后的实际前景更加广泛。
引用
[1]赵亮,刘双平,金梁,等.超宽带系统的功率谱密度限制问题研究[J].电信科学,2011,27(2):34-39.
[2]王一强,孙罡,侯祥博.UWB 超宽带技术研究及应用[J].通信技术,2009,42(3):70-72+75.
[3]许波,贺鹏飞,段嗣妍.无线体域网信道特性研究[J].电信科学,2011,27(3):78-84.
[4]WIN M Z.SCHOLTZ R A.Hnpulse Radio:How it Works[J].IEE Commun Lett,1998,2(2):36-38.
[5]SCHOLTZ R.Multiple Access with Time-hopping Impulse Modulation[C]// Military Communications Conference.IEEE,1993.
[6]ROY S,FOERSTER J R,SOMAYAZULU V S,et al.Ultrawideband Radio Design:the Promise of High-speed,Shortrange Wireless Connectivity[J].Proceedings of the IEEE,2004,92(2):295-311.
[7]PATWARI N,ASH J N,KYPEROUNTAS S,et al.Locating the Nodes:Cooperative Localization in Wireless Sensor Networks[J].IEEE Signal Processing Magazine,2005,22(4):54-69.
[8]LEE J Y,SCHOLTA R A.Ranging in a Dense Multipath Environment Using an UWB Radio Link[J].Proc.ieee J.sel.areas Commun,2002,20(9):1677-1683.
[9]CASSIOLI D,WIN M Z,VATALARO F,et al.Low Complexity Rake Receivers in Ultra-Wideband Channels[J].IEEE Transactions on Wireless Communications,2007,6(4):1265-1275.
[10]GUVENC I,CHONG C C,WATANABE F.NLOS Identification and Mitigation for UWB Location Systems[C]//IEEE Wireless Communications &Networking Conference.IEEE,2007.
[11]ZHAO G,NIU H.Research and Application of Indoor Positioning Based on UWB[C]//Third International Conference on Cyberspace Technology (CCT 2015).IET,2015.
[12]李晓龙.基于UWB的移动定位算法研究[D].呼和浩特:内蒙古大学,2016.
[13]HONG J M,KIM S H,LEE J G,et al.Indoor Position Monitoring System Using UWB Module[A].Advanced Science and Industry Research Center.Proceedings of 2018 3rd International Conference on Control,Automation and Artificial Intelligence (CAAI 2018)[C]//Advanced Science and Industry Research Center:Science and Engineering Research Center,2018:3.
[14]朱国辉,冯大政,向平叶,等.传感器误差情况下的线性校正TOA定位算法[J].系统工程与电子技术,2015,37(3):498-502.
[15]游小荣,裴浩,霍振龙.一种基于UWB的三边定位改进算法[J].工矿自动化,2019,45(11):19-23.
[16]王锦涛,皇甫一鸣,李哲舟,等.基于 UWB 测距技术的室内定位研究[J].通信电源技术,2018,35(5):50-53+56.
[17]马婧.基于UWB信号的单基站定位算法研究及AOA定位研究[D].青岛:中国海洋大学,2013.
[18]闫雷兵,陆音,张业荣.基于改进最小二乘算法的TDOA/AOA定位方法[J].电波科学学报,2016,31(2):394-400.
[19]高健,陆阳,李庆巧,等.采用三次通信的TOF与TDOA联合定位算法[J].电子测量与仪器学报,2020,34(3):66-73.
[20]张怡,席彦彪,李刚伟,等.基于卡尔曼滤波的TDOA/AOA混合定位算法[J].计算机工程与应用,2015,51(20):62-66.
[21]孔维炯,丁志中,方福柱.基于TDOA的高精度无线定位算法分析与实现[J].合肥工业大学学报(自然科学版),2019,42(6):756-762.
[22]刘洋,杨乐,郭福成,等.基于定位误差修正的运动目标TDOA/FDOA无源定位方法[J].航空学报,2015,36(5):1617-1626.
[23]肖竹,黑永强,于全,等.脉冲超宽带定位技术综述[J].中国科学(信息科学),2009(10):1112-1124.
[24]GUVENC I,CHONG C C,WATANABE S,et al.NLOSIdentification and Weighted Least-Squares Localization for UWB Systems Using Multipath Channel Statistics[J].EURASIP Journal on Advances in Signal Processing,2008(6):1-14.
[25]孙建强,尚俊娜,刘新华,等.气压计辅助的UWB室内定位方法[J].传感器与微系统,2021,40(6):30-33.
[26]李世银,朱媛,刘江,等.基于SAE-RF的三维UWB室内定位方法研究[J].传感器与微系统,2021,40(8):46-49.
[27]SRIVASTAVA N,HINTON G,KRIZHEVSKY A,et al.Dropout:A Simple Way to Prevent Neural Networks from Overfitting[J]Journal of Machine Learning Research,2014,15(1):1929-1958.
[28]张宝军,陈曦,廖延娜,等.基于DL-LSTM的UWB/INS室内定位算法[J].传感器与微系统,2021,40(10):147-150.
[29]姚顺宇,王志武,颜国正.双层双向长短期记忆应用于云轨精确定位[J].光学精密工程,2020,28(1):166-173.
[30]李明晓,张恒才,仇培元,等.一种基于模糊长短期神经网络的移动对象轨迹预测算法[J].测绘学报,2018,47(12):1660-1669.
[31]段晓磊,刘翔,陈强,等.基于粒子滤波与LSTM网络对未标记AGV的追踪方法[J].传感器与微系统,2020,39(2):37-39.
[32]鲍小雨,王庆,阳媛,等.一种抑制NLOS误差的UWB定位方法[J].传感器与微系统,2019,38(9):9-12.
[33]李贺龙,于海波,何娇兰,等.基于数据融合方法的智能表运行剩余寿命[J].电测与仪表,2019,56(18):126-133.
[34]GEZICI S,TIAN Z,GIANNKIS G B,et al.Location Via Ultrawideband Radios-a look at Positioning Aspect of Future Sensor Network[J].IEEE Signal Process Mag,2005,22(2):70-84.
[35]盛坤鹏,王坚,李晨辉,等.非视距误差改正的超宽带定位模型研究[J].测绘科学,2021,46(3):40-47.
[36]曾玲,彭程,刘垣.基于非视距鉴别的超带宽室内定位算法[J].计算机应用,2018,38(S1):131-134+139.
[37]NI J,ARNDT D,NGO P,et al.UWB Tracking System Design for Free-flyers[J].In:Proceeding of Space 2004 Conference and Exhibit AIAA.San Diego,2004:1-9.
[38]HUSSAIN M G M.Ultra-wideband Impluse Radar-an Overview of the Principles[J].IEEE Aerosp Electron Syst Mag,1988,13(9):9-14.
[39]CHEN Y F,GUNUWAN E,KIM Y,et al.UWB Microwave Imaging for Breast Cancer Detection:Tumor/Clutter Identification Using a Time of Arrival Data Fusion Method[C]//IEEE Antennas&Propagation Society International Symposium.IEEE,2006:255-258.
[40]陈新科,喻川,文智力.UWB定位技术在煤矿井下的应用[J].煤炭科学技术,2018,46(S1):187-189.
[41]高思琪,孙建平.UWB定位技术的应用研究[J].仪器仪表用户,2019,26(3):77-82.
