一种并联骨折手术机器人的安全运动控制方法
2023-03-15宋轶民贾殿魁贺志远连宾宾
宋轶民,贾殿魁,贺志远,连宾宾,孙 涛,姚 琦
一种并联骨折手术机器人的安全运动控制方法
宋轶民1,贾殿魁1,贺志远1,连宾宾1,孙 涛1,姚 琦2
(1. 天津大学机构理论与装备设计教育部重点实验室,天津 300350;2. 中国人民解放军总医院第一医学中心骨科,北京 100853)
骨折手术机器人是实现精准微创骨折复位的优势方案.现有骨折复位手术器械存在效率低、精度差、缺乏复位安全策略等问题,难以保证安全高效的治疗.为解决上述问题,本文提出一种并联骨折手术机器人及基于全关节逆解算法的安全运动控制方法.首先,针对该并联机构开展全关节逆解分析.由骨折复位轨迹的离散轨迹点获取机器人末端的位姿,建立机器人机构的闭环矢量方程,以关节转角为未知量整理多元一次方程组,考虑关节间的运动约束通过两条运动链解析求解所有关节转角.其次,设计安全运动控制系统.上位机设置正常、预警及超限3种状态.在机器人运行过程中,由上位机读取复位轨迹离散点的位姿信息,通过全关节逆解模型计算出下一轨迹离散点对应的关节转角并判断运行状态,若超限则发送指令使机器人停止运动,并显示发生危险的关节位置.最后,开展安全运动仿真与实验研究.仿真表明全关节逆解模型可快速计算出全部关节的运动状态并准确进行安全判断.实验结果表明,骨折手术机器人运行过程中,控制系统可及时发现机器人临近危险状态并使机器人停止运动.本文提出的安全运动控制方法无需增设安全检测或保护装置,既保证了骨折手术机器人的轻质便携需求,又保证了安全高效精准的骨折复位治疗.
骨折手术机器人;并联机构;全关节逆解;安全运动控制
随着经济社会发展、人口老龄化加剧、交通运输规模膨胀等因素的交叉影响,创伤性骨折疾病频繁发生,严重影响人类生命和健康[1-2].传统的骨折手术主要是医师在骨折部位切口,通过手法或器械对齐骨折断端,采用髓内钉固定并维持骨折断端的相对位置[3-5].此治疗方式可靠性较高、治疗效果较好,但受医师经验和术中设备的制约,存在创伤大、复位精准度低、易发生二次感染等风险[4, 6-7].
20世纪90年代后期,机器人技术[8]开始被引入骨科领域.骨科医疗机器人可提高手术精度、降低手术伤害,被视为解决传统骨折复位手术临床难题的优势方案.早期的骨科医疗机器人集中于骨折断端的外固定支架设计,其中最富盛名的是Ilizarov支架[9-10]. 此支架由3~4根螺纹杆和2个钢环组成.使用时,采用克氏针将骨折断端分别固定在钢环上,调节螺纹杆长度即可调整骨折断端的相对位置.Ilizarov支架轴向刚度高、固定效果好,通常用于施加轴向牵拉力促进骨组织生长,但不便于骨折手术过程的断骨相对位姿调节.在Ilizarov支架的基础上,美国医生Taylor和工程师Taylor引入六自由度Stewart并联机构,发明了骨折复位手术外固定支架Taylor[11].Taylor支架包括作为动静平台的两个环与6个相同的SPS支链(S代表球铰链,P代表移动副),采用螺纹半针或克氏针连接骨折断端与环,分别调节支链上P副的长度可使动平台相对于静平台实现位姿调整.Taylor支架极大提高了骨折断端的位姿调整精度,配合计算机辅助诊疗软件简化了骨折治疗的流程,获得医师的普遍青睐[12].同样基于六自由度并联机构,TL-HEX[13-14]、Ortho-SUV[15-17]等外固定器械相继提出并投入应用.虽然此类外固定器械一定程度上降低了医师的劳动强度,但在骨折手术过程中仍存在以下不足:①医师无法同时调节6个支链的P副移动量,复位轨迹执行效率较低;②P副移动量仅能取整数值,无法使动平台达到工作空间内的任意位姿;③缺乏安全保障,无法避免机器人运动超限产生构件碰撞.
针对上述问题,本文提出一种基于6-UHU并联机构的骨折手术机器人,采用高精度伺服电机驱动支链运动,实现骨折端的位姿调节.其中,R、H和U表示转动副、螺旋副和虎克铰,下划线表示电机驱动关节.与现有骨外固定器械相比,6-UHU并联骨折机器人可同步调节支链的运动,有助于提高骨折复位效率,精确调节骨折端的任意位姿.此外,6-UHU并联机构结构紧凑,电机置于静平台端的布局形式包含以下优点:①驱动部分便于拆装,有利于减轻机器人穿戴重量、降低成本;②可实现手动驱动方案,为医师诊疗提供了多种复位手术执行方案;③简化了支链结构,减少对术中操作和影像透视的遮挡.但相应地,电气系统的引入加大了安全隐患.为保证高效精准安全的骨折手术,亟需开展6-UHU并联骨折手术机器人的安全保障研究.
安全保障的任务是避免机器人在执行复位轨迹的过程中产生非理想运动而伤害患者、医师或机器人.常见的安全保障方法是在机器人的机械本体嵌入安全保障机构.例如,Choi等[18]设计了协作机器人的安全关节,当电机施加的扭矩超过阈值时,安全关节可自由转动而不传递扭矩.针对冲击所造成的瞬时载荷,Park等[19]提出了一种由线性弹簧和滑块曲柄机构组成的安全关节机构.该机构可在外力超出临界值时减小机器人的刚度,避免碰撞.此类增加安全机构的方法可保障机器人的机械安全,但机器人系统的质量、复杂程度与控制难度随之增加,不利于骨折手术机器人的轻质便携设计.
安全保障的另一思路是通过传感器感知机器人的状态或周围的环境,在控制系统内设置安全模块使机器人避开安全隐患.例如,利用超声、视觉、光电等传感器检测人机相对位置,设计避障控制算法保障人身安全[20].或者借助速度、加速度及力传感器检测机器人的运行信息,编写控制指令预防机器人碰撞[21-22].尽管由传感器获取机器人运行状态的方式有助于精准预知危险状况,但受手术室条件、骨折手术狭小空间等限制,难以优选出小型化高精度的传感器.此外,现有安全运动控制主要针对六自由度串联型工业机器人进行研究,通常需要在每个主动关节上添加位置或力传感器来监测关节的运动状态[23-24].然而,6-UHU并联骨折手术机器人的支链内包括主动及被动关节,所有关节均添加传感器的难度极大.
基于此,本文提出一种无需添加保护装置或增设传感器的安全运动控制方法,由6-UHU并联机构的全关节逆解预知机器人的运动状态,设置安全控制策略,集成安全控制的软硬件模块并通过仿真与实验研究验证方法的有效性.
1 全关节逆解分析
6-UHU并联骨折手术机器人如图1(a)所示.上、下环定义为静、动平台,分别通过克氏针或螺纹半针与骨连接.静、动平台之间设置6条结构相同的UHU支链,呈空间三对称布置.驱动关节,副的转角难以直接根据支链长度求得,所以必须通过全关节逆解得到,副的转角,同时求得所有关节变量,进而可以获悉所有关节及杆件的空间状态,为后续安全监测的提供判断依据.本节开展全关节逆解运算,已知动平台的位姿计算所有关节的运动状态.
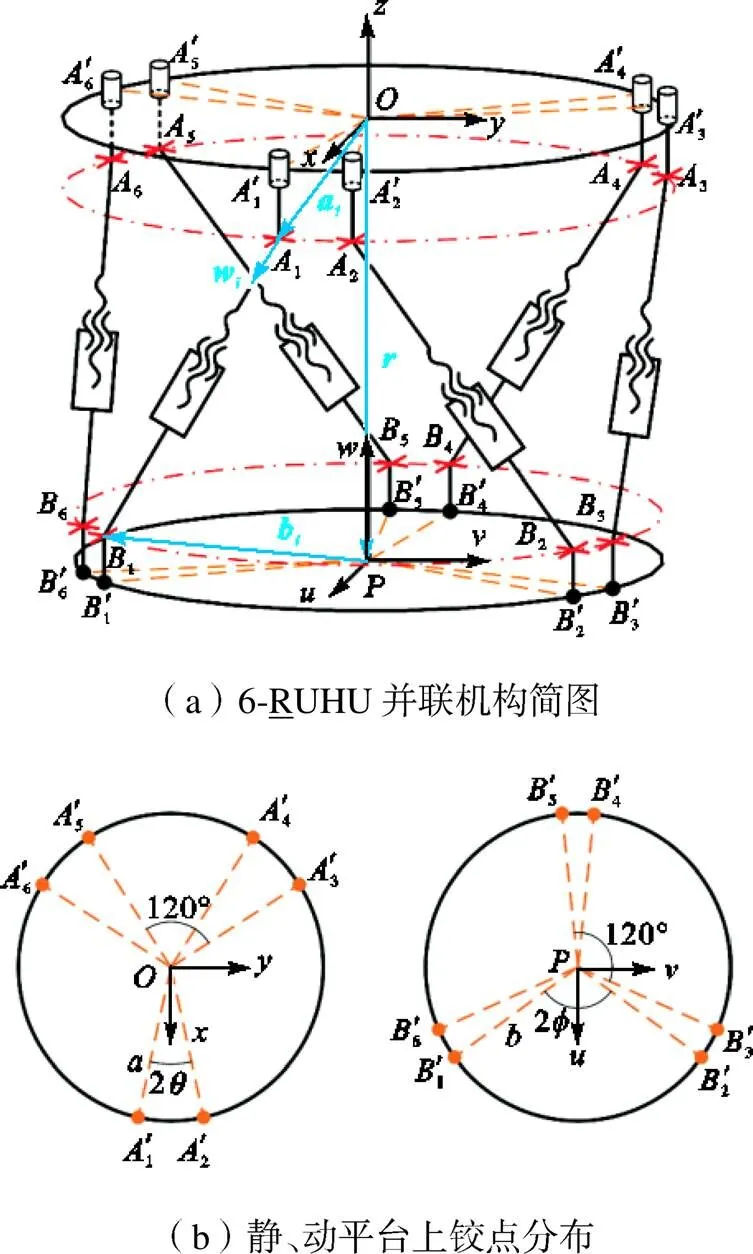
图1 6-RUHU并联骨折手术机器人的结构示意


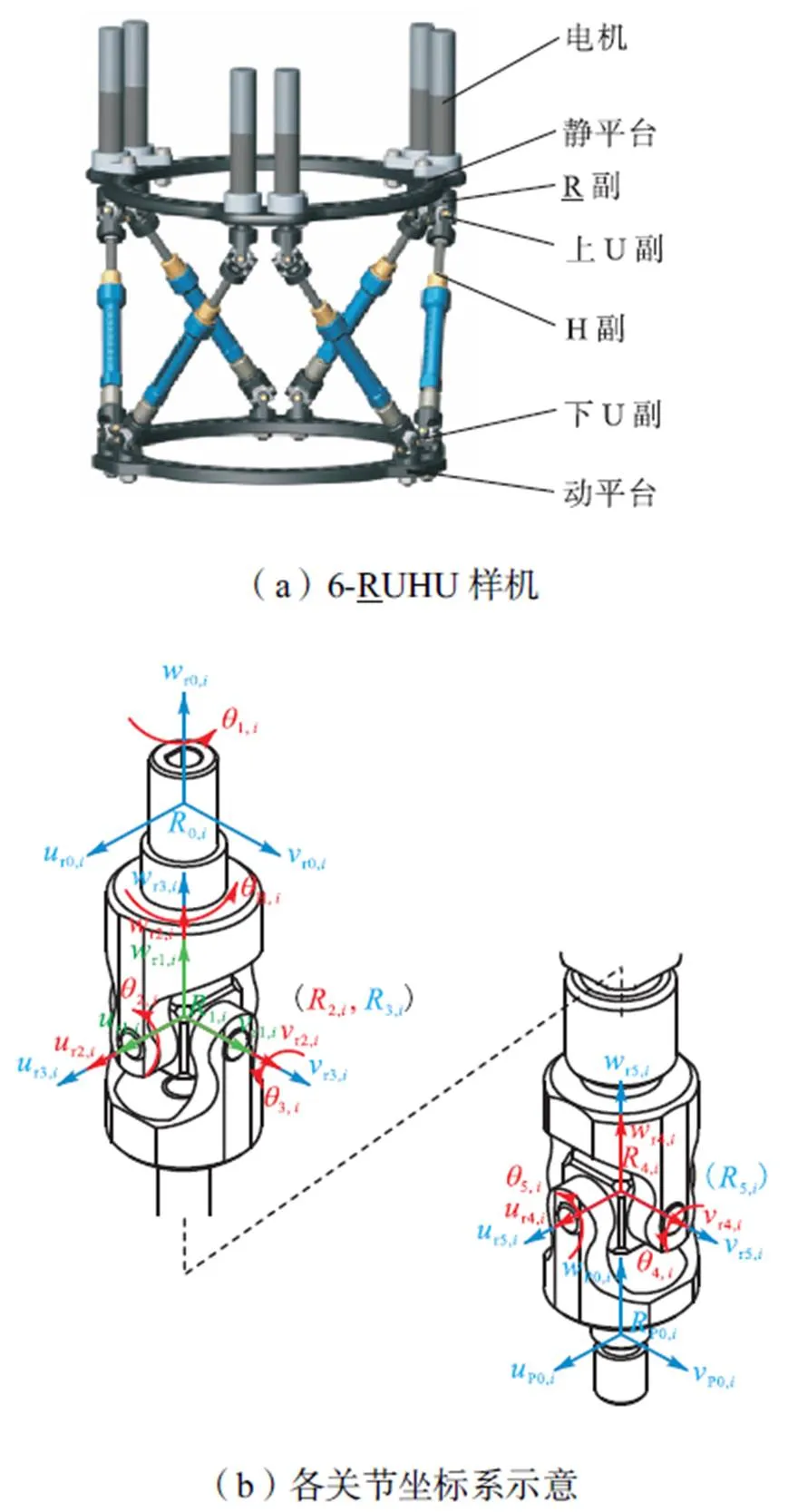
图2 6-RUHU的关节坐标系
基于上述关系,可构造方程






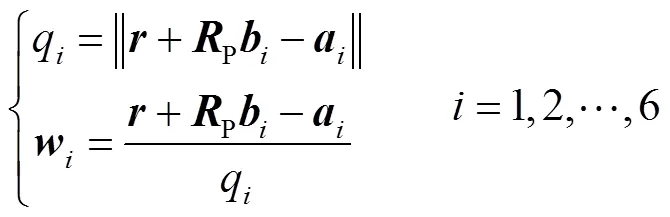
由式(6)可得6-UHU并联机构的支链长度与方向向量为
式(10)等号左边展开得
令
由式(11)、式(12)可得


因此,式(5)可写为

式中

式(15)等号左边展开的结果为

由式(16)、式(17)可得

则驱动关节副的从初始位姿至给定位姿的转角可表示为

至此,6-UHU并联骨折手术机器人的全关节逆解可解析求得.上述计算过程假设支链H副为右旋螺纹,若H副采用左旋螺纹,则式(14)、式(19)、式(20)分别改为
2 安全控制系统设计
6-UHU并联骨折手术机器人的控制任务是:利用给定的骨折复位轨迹定义机器人的末端运动轨迹并离散出若干关键轨迹点,由全关节逆解模型得到电机的驱动量,通过调节电机的驱动量达到控制机器人末端运动轨迹的目的.安全控制是在执行上述复位轨迹的过程中监测被动关节的运动状态,若超出许用边界则使所有驱动关节急停,防止机器人发生损伤.
2.1 安全控制流程
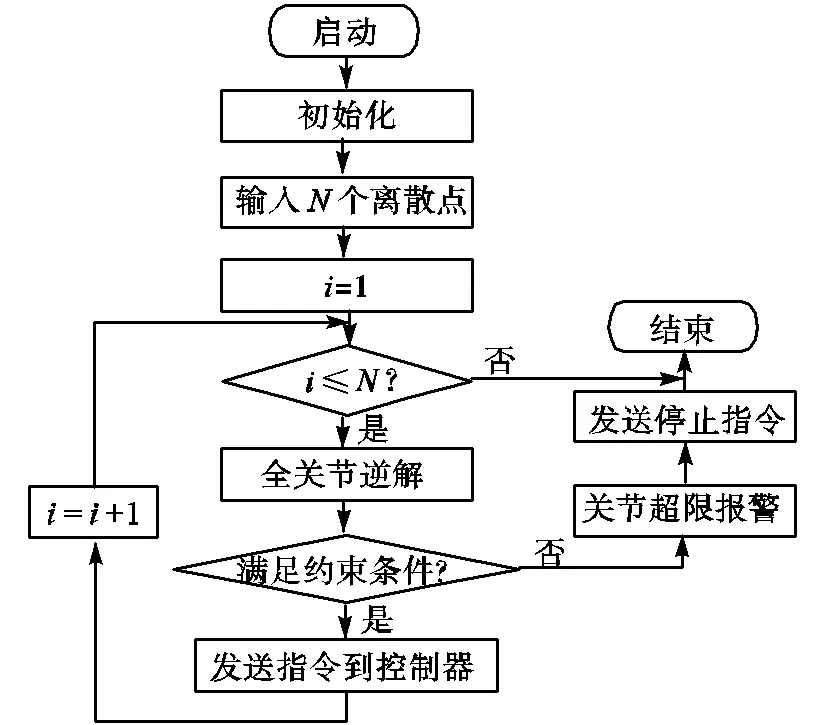
图3 控制流程
2.2 安全控制软硬件集成
根据安全控制流程,机器人的控制任务涉及:操作空间位姿与电机驱动量的映射转换,电机驱动控制.前者通过上位机软件实现,后者由嵌入式驱动器进行控制.为解决机器人控制系统便携性和多轴协同控制的问题,利用CAN总线数据广播功能,保证嵌入式驱动器同时接收到启动指令.因此,6-UHU并联骨折手术机器人的控制系统包括上位机、USB-CAN总线转换器、嵌入式驱动器、直流电机和编码器,如图4所示.
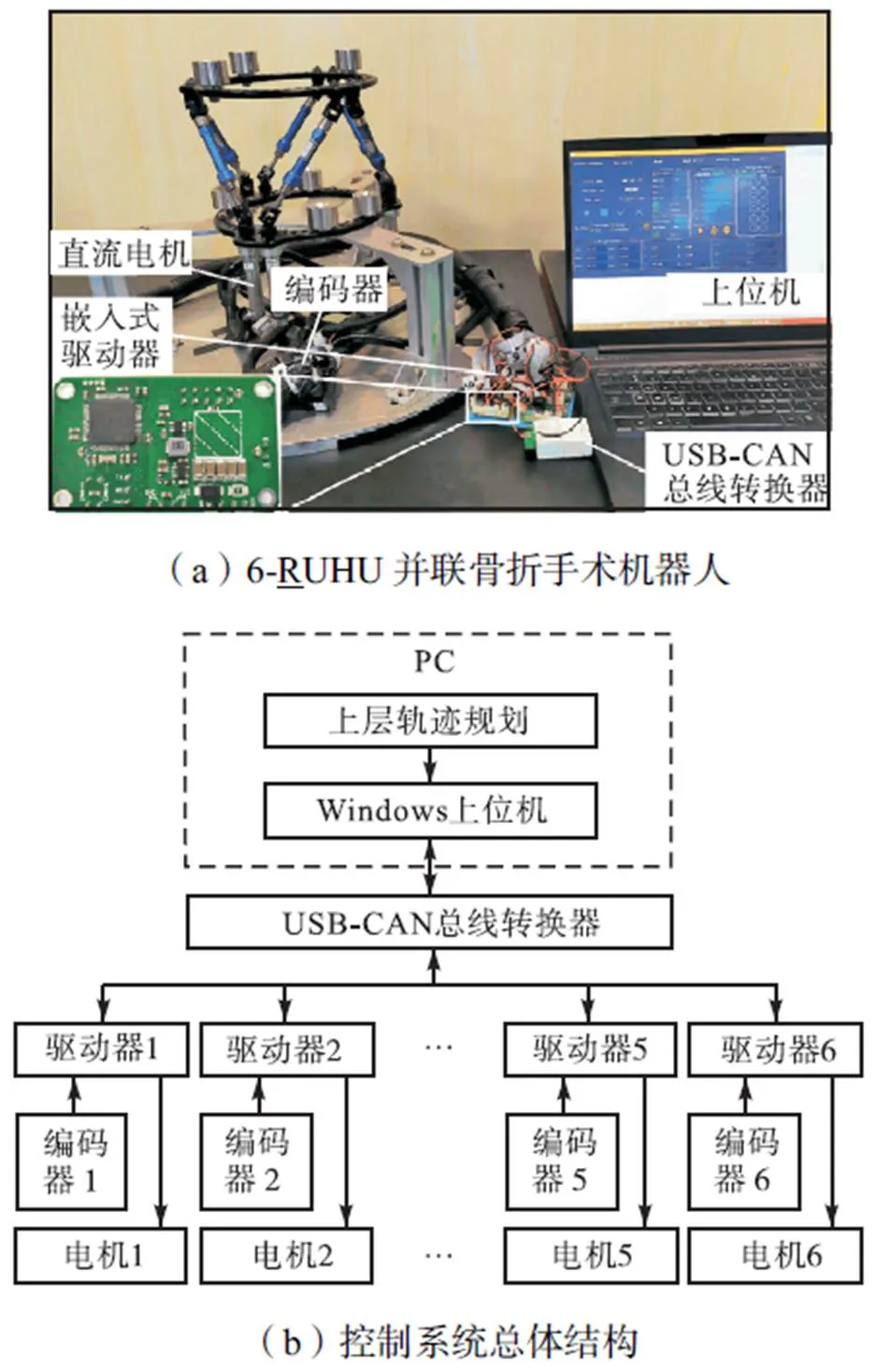
图4 机器人系统组成
上位机是控制系统的控制中心,选用配置Windows操作系统的PC机.上位机软件基于QT和Visio Studio 2017开发.依据安全控制流程,上位机软件包括5大模块:人机交互接口、全关节逆解、安全运动判断、插值运算规划及运行参数界面.其中,人机交互接口用于接收外部控制命令和参数,运行参数显示界面监测机器人的运行状态,如图5(a)所示.上位机软件实现安全控制的步骤如下.

图5 上位机控制界面
步骤1医生通过人机交互接口输入骨折复位轨迹的个轨迹点.
步骤3 将第个轨迹点的所有关节变量值与预设的关节许用值进行比较,判断机器人的状态,分为3种情况:①正常状态:关节取值远小于关节许用值,如图5(a)所示,此时转到步骤4;②预警状态:关节取值接近关节许用值,如图5(b)所示,此时弹出预警窗口,显示接近危险的关节及其取值,转至步骤4;③超限状态:关节取值超出关节许用值,如图5(c)所示,将当前轨迹点的速度设为0,向控制器发送指令使机器人在当前位置停止.
步骤4 对第个轨迹点进行3次样条插值运算,规划时间与速度信息,保证轨迹运行的连续性.
USB-CAN总线转换器连接上位机与嵌入式驱动器.上位机可通过USB-CAN总线转换器发送指令到驱动器内部,也可监视CAN总线网络,实现双向通信.嵌入式驱动器由控制电路、驱动电路组成.控制电路用于接收并解析外部控制指令,发送电机控制信号到驱动电路.驱动电路接收电机控制信号,通过H桥电路对直流电机进行控制.
针对典型复位操作和复位路径,通过计算和借助solidworks软件Motion仿真分析,确定了驱动力需求.据此,本文选择直流电机(Maxon DCX16L)搭配减速器(Maxon GPX16HP 62∶1),输出扭矩可达0.7N·m,满足使用需求.电机底部配置一个绝对式编码器(Maxon ENX16 EASY 1024IMP),可以实时反馈电机转角到驱动器.
3 安全运动仿真
为验证6-UHU并联骨折手术机器人安全运动控制方法的有效性,给定复位轨迹的离散轨迹点文件,令其中的某些轨迹点超出机器人的工作空间边界,检测机器人控制系统是否正确识别工作状态.本节首先通过机器人结构的几何条件确定关节安全阈值条件,随后编写全关节逆解程序,检验给定的复位轨迹是否满足安全要求.
3.1 关节安全阈值分析
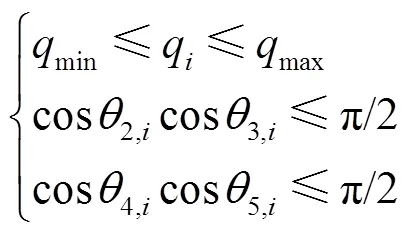
6-UHU并联机构的关节包括副、H副和U副.副作为主动关节,可绕着轴线实现全周运动.H副需限制其直线移动的行程,其安全阈值条件定义为

(25)

综上,6-UHU并联骨折手术机器人各个运动关节的许用值为
3.2 安全运动仿真
表1 结构参数

Tab.1 Structural parameters
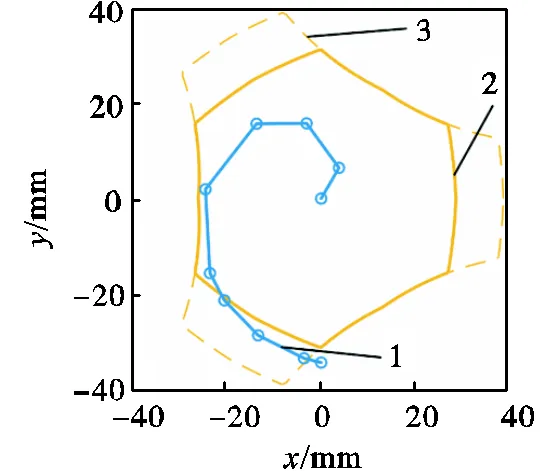
图7 工作空间边界与给定轨迹
表2 轨迹点坐标
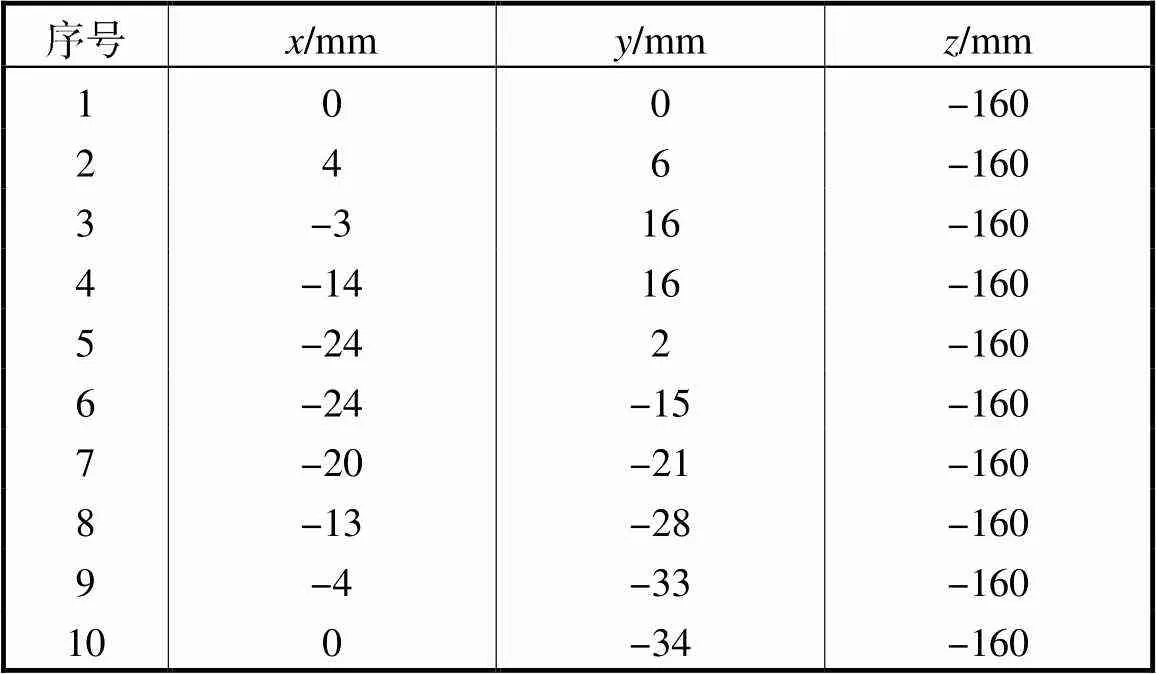
Tab.2 Coordinates of discrete points
运行逆解程序后得到对应每一个轨迹点的关节角度值.其中,U副转角为
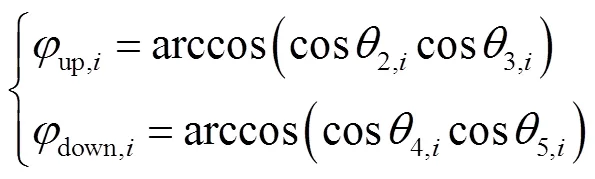

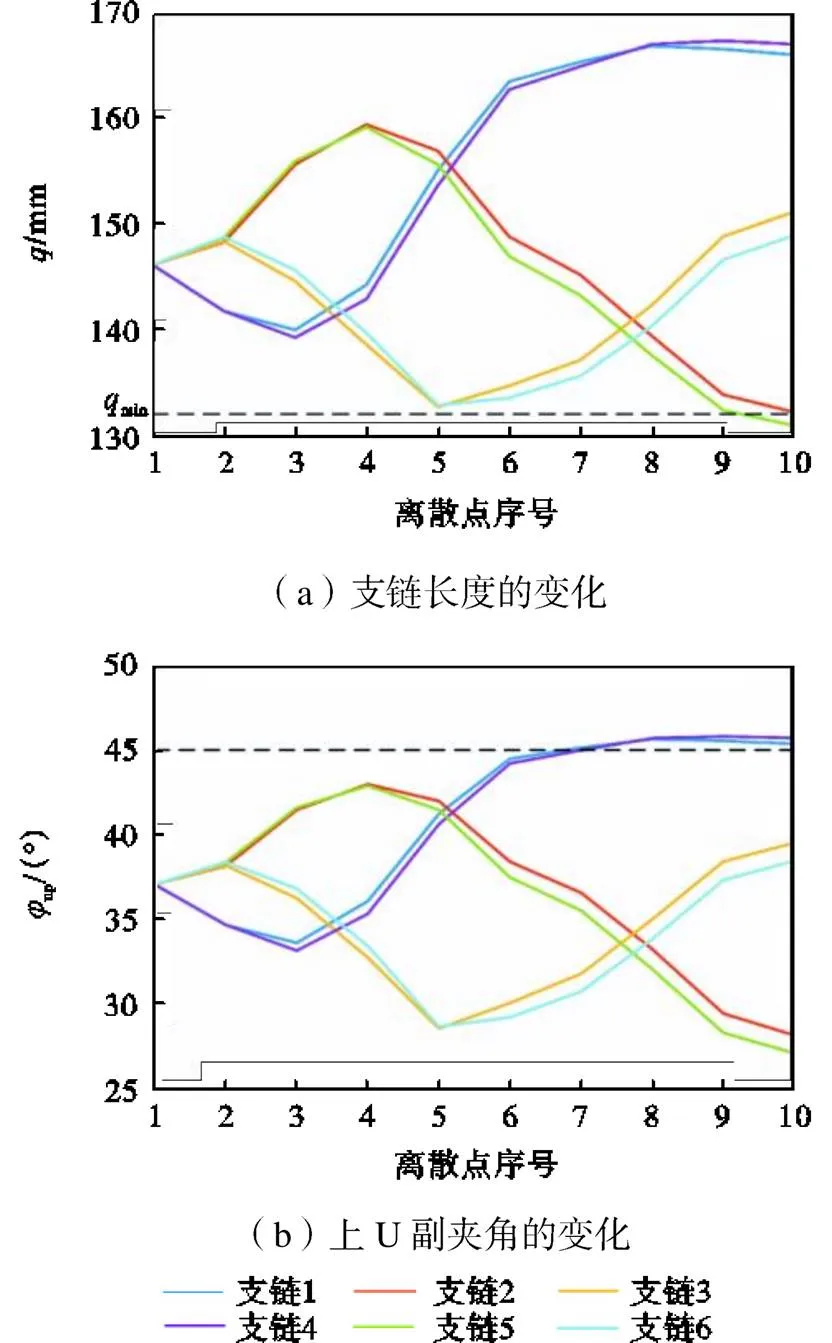
图8 轨迹仿真计算结果
4 实验研究
4.1 安全运动实验
为验证安全运动控制系统的功能,开展6-UHU并联骨折手术机器人的复位轨迹运动实验,搭建实验平台如图4(a)所示.本实验中关节安全阈值与仿真一致.给定如图9所示的3条复位轨迹.每条轨迹含有6个轨迹离散点,起点均为机器人的中间位置,终点分别是关节超限的轨迹点.轨迹1末端点处机器人H副行程超限,轨迹2末端点处U副夹角超限,轨迹3末端点处H副和U副均超限.
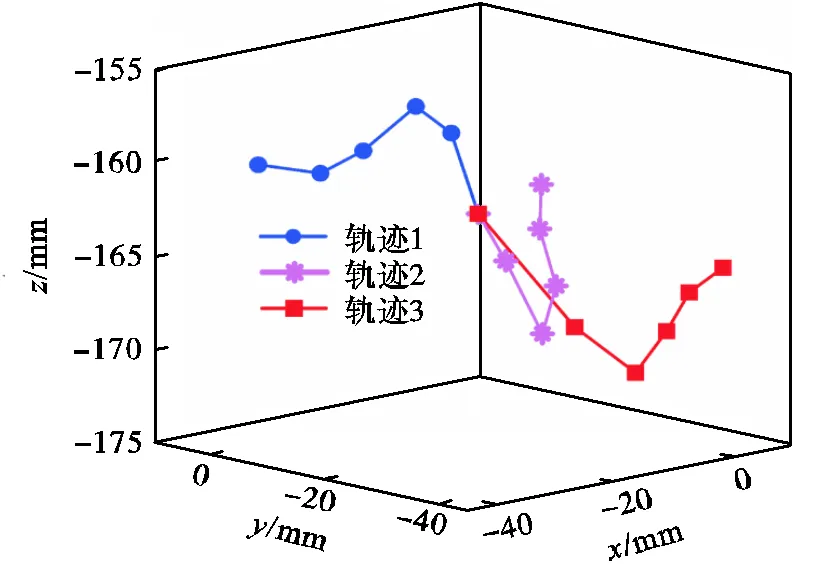
图9 给定的实验复位轨迹

类似地,将轨迹2的轨迹点位姿信息输入上位机交互界面.运行过程中发现机器人在第5个轨迹点处停止,此时界面显示第6个轨迹点处机器人支链1与支链4的U副夹角超出给定的安全阈值.并且H副显示预警,提示当前H副的行程接近安全阈值,如图10(b)和图10(e)所示.将轨迹3的轨迹点位姿信息输入上位机界面并运行.机器人停止于第5个轨迹点处,界面显示第6个轨迹点支链1与支链4的H副行程与U副夹角均超出安全阈值,如图10(c)和图10(f)所示.
删去所有轨迹的第6个轨迹离散点并再次运行,6-UHU并联骨折手术机器人均能平稳运行所有轨迹.在第4个轨迹点处,控制系统显示预警状态,表明关节取值接近安全阈值,但仍控制机器人运行至第5轨迹点处.
通过实验测试,证明了基于全关节逆解算法的安全运动控制可有效判断关节运动是否超出安全阈值,保证机器人不产生干涉或碰撞.另外,若机器人的复位轨迹存在关节超限,控制系统可提前获取详细的关节信息并使机器人静止于安全位置.
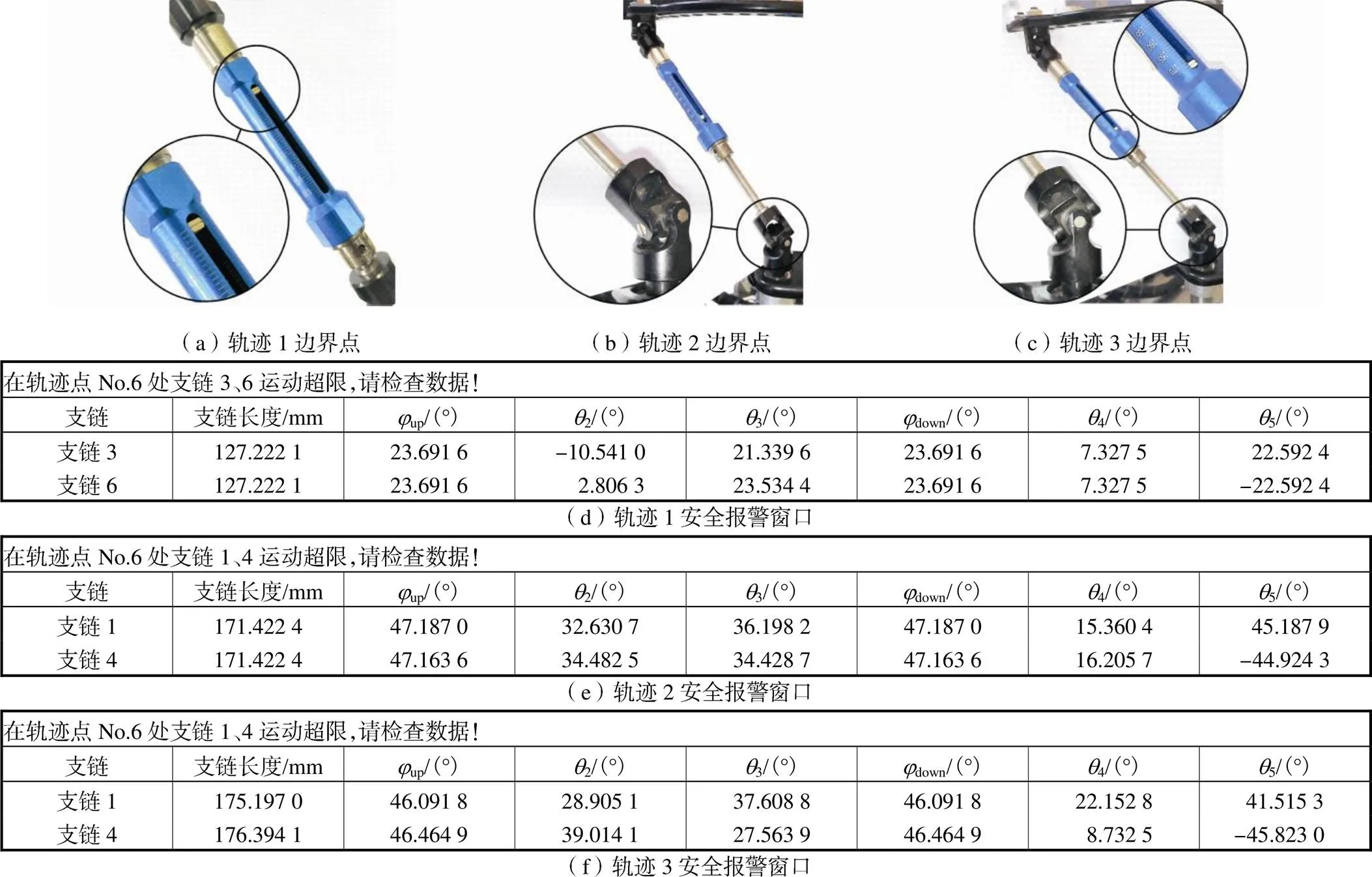
图10 实验测试结果
4.2 骨模型复位实验
为了检验机器人以及所搭建的控制系统的有效性,利用骨折手术机器人系统,通过设计模型骨骨折典型实验进行验证.该模型骨通过骨针固定到机器人的静、动平台,并随机给定远端骨成角和位移畸形.然后由医师根据三维影像数据重建模型给出复位方案,输入控制系统上位机软件后控制机器人该复位操作.复位过程如图11所示.
实验过程顺利,胫骨模型运动过程平稳,无干涉碰撞情况发生,并且复位效果良好.该实验证明了机器人实现骨折治疗的可行性和有效性,其优势主要体现在以下方面:①通过六轴协同控制可以精确实现骨折复位过程,避免了手动单个支链调节可能的造成意外畸形;②相对于传统手术和现有外固定器械,机器人方案在提高复位精度的同时大大降低了医师劳动强度.
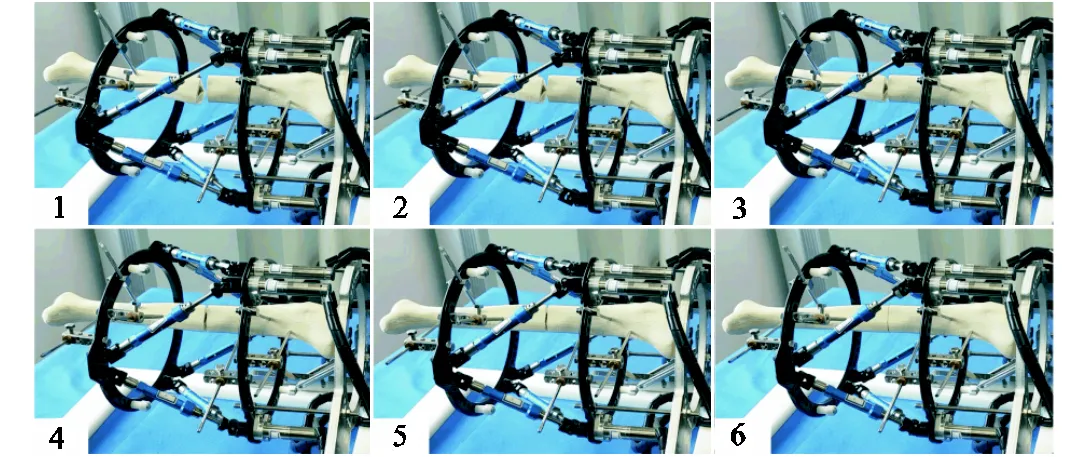
图11 复位过程
5 结 论
针对现有并联骨折手术机器人缺乏安全运动保障的问题,本文提出一种6-UHU并联骨折手术机器人以及基于全关节逆解的安全运动控制方法.
(1) 建立每一运动支链的闭环矢量方程,求出支链的长度和方向向量.分别构建第1~3关节、第4~5关节的转换矩阵方程,同时考虑H副的转动与移动线性关系,解方程获得所有副和U副的转角.基于此,已知机器人末端的轨迹离散点可计算所有关节的运动状态.
(2) 以关节阈值为安全边界,指定安全运动控制流程.在上位机计算下一轨迹离散位置点的全部关节运动状态,与关节阈值比较,进行安全判断.在界面处设置正常、预警与超限3种状态,若关节超限,上位机通过CAN总线下达指令使电机静止于当前 位置.
(3) 开展6-UHU并联骨折手术机器人的安全运动仿真,结果表明全关节逆解模型可快速准确判断超限关节.进行机器人的安全控制实验测试,发现控制系统能够提前预知关节超限的危险,避免机器人产生干涉或构件碰撞.所提出的安全运动控制方法无需添加传感器或安全保障机构,可满足轻质便携且安全可靠的骨折治疗机器人需求.最后,通过模型骨骨折复位实验,验证了机器人及其控制系统应用于骨折复位的可行性和有效性.
本文基于关节运动量监测开发出安全运动控制器,可避免在执行复位轨迹过程中机器人发生干涉损坏或导致患者的二次损伤.但仅考虑机器人运动信息的安全控制仍无法满足安全骨折复位手术的需求,需考虑肌肉牵拉力等机器人末端作用力的影响,提出力/位置耦合控制方法,开展动物实验验证力位控制器的有效性与安全性.
[1] Azar F M,Beaty J H,Canale S T. 坎贝尔骨科手术学[M]. 13版. 北京:北京大学医学出版社,2018.
Azar F M,Beaty J H,Canale S T. Campbell’s Operative Orthopaedics[M]. 13th ed. Beijing:Peking University Medical Press,2018(in Chinese).
[2] 赵燕鹏. 长骨骨折精准手术机器人系统研究[D]. 北京:中国人民解放军医学院,2016.
Zhao Yanpeng. Development of a Surgical Robot System for Long Bone Fractures[D]. Beijing:Chinese PLA Medical School,2016(in Chinese).
[3] Kempf I,Grosse A,Beck G. Closed locked intramedullary nailing. Its application to comminuted fractures of the femur[J]. The Journal of Bone and Joint Surgery (American Volume),1985,67(5):709-720.
[4] Wolinsky P R,McCarty E,Shyr Y,et al. Reamed intramedullary nailing of the femur:551 cases[J]. Journal of Trauma:Injury Infection and Critical Care,1999,46(3):392-399.
[5] Nork S E,Schwartz A K,Agel J,et al. Intramedullary nailing of distal metaphyseal tibial fractures[J]. Journal of Bone and Joint Surgery(American Volume),2005,87(6):1213-1221.
[6] 唐佩福. 计算机辅助骨科手术系统在创伤骨科中的应用[J]. 武警医学,2011,22(5):369-372.
Tang Peifu. Application of computer assisted orthopaedic surgery in traumatic orthopedics[J]. Medical Journal of the Chinese People’s Armed Police Forces,2011,22(5):369-372(in Chinese).
[7] Liebergall M,Mosheiff R,Segal D. Navigation in orthopaedic trauma[J]. Operative Techniques in Orthopaedics,2003,13(2):64-72.
[8] Gomes P. Surgical robotics:Reviewing the past,analysing the present,imagining the future[J]. Robotics and Computer-Integrated Manufacturing,2011,27(2):261-266.
[9] Valentine W A,Williams P A,Tafoya W L. Ilizarov external fixation:Surgical principles,nursing implications[J]. AORN Journal,1990,51(6):1530-1545.
[10] 秦泗河. Ilizarov技术概述[J]. 中华骨科杂志,2006(9):642-645.
Qin Sihe. Overview of Ilizarov technique[J]. Chinese Journal of Orthopaedics,2006(9):642-645(in Chinese).
[11] Seide K,Faschingbauer M,Wenzl M. E,et al. A hexapod robot external fixator for computer assisted fracture reduction and deformity correction[J]. International Journal of Medical Robotics and Computer Assisted Surgery,2004(1):64-69.
[12] 葛启航,万春友,邵 醒,等. Taylor 空间支架结合计算机辅助闭合复位在胫腓骨骨折中的应用研究[J]. 中国修复重建外科杂志,2019,33(2):144-148.
Ge Qihang,Wan Chunyou,Shao Xing,et al. Application of Taylor spatial frame combined with computer-assisted closed reduction in the treatment of tibiofibular fractures[J]. Chinese Journal of Reparative and Reconstructive Surgery,2019,33(2):144-148(in Chinese).
[13] Orthofix. TL-HEX[EB/OL]. https://www. orthofix. com/ifus/tl-hex-pedi/,2021-09-02.
[14] Simone R,Luigi A N,Salvatore M,et al. Correction of complex lower limb angular deformities with or without length discrepancy in children using the TL-HEX hexapod system:Comparison of clinical and radiographical results[J]. Journal of Pediatric Orthopaedics B,2019,28(3):214-220.
[15] Ortho-SUV. Innovations[EB/OL]. http://ortho-suv.org/ index.php?option=com_content&view=article&id=127&Itemid=93&lang=en,2021-09-02.
[16] Skomoroshko P V,Vilensky V A,Hammouda A I,et al. Determination of the maximal corrective ability and optimal placement of the ortho-SUV frame for femoral deformity with respect to the soft tissue envelope,a biomechanical modelling study[J]. Advances in Orthopedics,2014:268567-1-268567-10.
[17] 傅 超,范佳程,王石刚,等. Ortho-SUV支架空间位姿建模与求解[J]. 上海交通大学学报,2020,54(10):1007-1014.
Fu Chao,Fan Jiacheng,Wang Shigang,et al. Modelling of spatial pose of Ortho-SUV frame and mathematical solution[J]. Journal of Shanghai Jiaotong Uni-versity,2020,54(10):1007-1014(in Chinese).
[18] Choi D,Choi J,Cho C,et al. A safe robot arm with safe joints and gravity compensator[J]. International Journal of Control,Automation and Systems,2013,11(2):362-368.
[19] Park J,Song J,Kim H. Safe Joint Mechanism Based on Passive Compliance for Collision Safety[M]. Berlin:Springer Berlin Heidelberg,2008.
[20] Gecks T,Henrich D. Human-robot cooperation:Safe pick-and-place operations[C]//IEEE International Workshop on Robot and Human Interactive Communication. Piscataway,USA,2005:549-554.
[21] 肖聚亮,田志伟,洪鹰,等. 一种轻型模块化协作机器人碰撞检测算法[J]. 天津大学学报(自然科学与工程技术版),2017,50(11):1140-1147.
Xiao Juliang,Tian Zhiwei,Hong Ying,et al. Collision detection algorithm for light and modular cooperative robots[J]. Journal of Tianjin University(Science and Technology),2017,50(11):1140-1147(in Chinese).
[22] Polverini M P,Zanchettin A M,Rocco P. A computationally efficient safety assessment for collaborative robotics applications[J]. Robotics and Computer-Integrated Manufacturing,2017,46:25-37.
[23] Yamada Y,Hirasawa Y,Huang S,et al. Human-robot contact in the safeguarding space[J]. IEEE/ASME Transactions on Mechatronics,1997,2(4):230-236.
[24] Lu Shujun,Chung J H,Velinsky S A. Human-robot collision detection and identification based on wrist and base force/torque sensors[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona,Spain,2005:3796-3801.
Safety Motion Control for a Parallel Fracture Surgical Robot
Song Yimin1,Jia Diankui1,He Zhiyuan1,Lian Binbin1,Sun Tao1,Yao Qi2
(1. Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education,Tianjin University,Tianjin 300350,China;2. Institute of Orthopedics,The First Medical Centre,Chinese PLA General Hospital,Beijing 100853,China)
The fracture surgical robot has been recognized as a promising solution to the problems encountered in realizing precise and minimally invasive fracture surgery. Current manual fracture surgical robots have the problems of low efficiency,poor precision and safety control. To solve these problems,a parallel fracture surgical robot is proposed,and a safety motion control method is investigated in this study. The proposed safety motion control method is based on the inverse kinematics of all joints. First,the inverse kinematics of all joints is carried out. The discrete trajectory point is derived from the reduction trajectory to formulate the closed-loop vector equation. Considering the motion constraints between the joints,the rotation angles of the joints are solved analytically through two kinematic chains. Then,the safety motion control system is designed. Three states,i.e.,normal,close to danger,and danger,are defined in the host computer. During the operation of the robot,the host computer reads the pose information of the discrete points of the reduction trajectory,calculates the joint rotation angle corresponding to the next discrete trajectory point through the inverse solution model of all joints,and determines the operation state. In the danger state,the controller stops the robot to prevent collisions,andthe positions of the joints at risk are shown. Finally,simulations and experiments are conducted to verify the proposed safety motion control method. The simulation results show that the inverse kinematics of all joints can rapidly identify the motion states of the robot. The experiments show that the control system can efficiently react to the danger and protect the robot from collisions. The merits of the proposed safety control method are twofold:①lightweight and wearable features are assured by not adding sensors or safety mechanisms,and ②fracture reduction efficiently and safely prevents collisions.
fracture surgical robot;parallel mechanism;inverse kinematics of all joints;safety motion control
10.11784/tdxbz202112009
TH122
A
0493-2137(2023)03-0221-11
2021-12-06;
2022-02-24.
宋轶民(1971— ),男,博士,教授,ymsong@tju.edu.cn.
姚 琦,yqjh2010@163.com.
国家重点研发计划资助项目(2018YFB1307805);天津市科技计划资助项目(18PTLCSY00080,20201193).
Supported by the National Key Research and Development Program of China(No. 2018YFB1307805),Tianjin Science and Technology Plan Program(No. 18PTLCSY00080,No. 20201193).
(责任编辑:王晓燕)
