液体火箭发动机智能故障诊断的研究现状*
2023-03-13胡海峰
胡海峰
1.北京航天自动控制研究所,北京 100854 2.航天智能控制国家重点实验室,北京 100854
0 引言
液体火箭发动机工作在恶劣物理条件下,作为火箭的动力核心,运行过程中一旦发生故障,会造成巨大灾难[1,2]。自1967年1月阿波罗4A号发生严重事故、到2006年为止,在美国等国家进行的共249次载人航天发射飞行中,出现故障166起[3],其中动力系统故障占航天系统总故障的60%以上[4]。因此,及时准确发现发动机运行过程中的异常,对于及时补救和完善操作规程[5]、进行飞行控制重构,以尽可能挽救任务具有重要意义[6-7]。
液体火箭发动机的结构极其复杂,是包含多个树形分支子系统的复杂系统,可分为管路系统、涡轮泵系统以及推力室系统,每个系统又由多个部件耦合连接[8-9]。当故障发生时,环境干扰及故障多样性、故障信息耦合的复杂性,给液体火箭发动机故障诊断及预测带来了极大挑战[5,8]。
液体火箭发动机的健康监控包括故障检测、故障诊断和故障控制等。故障检测是利用各类传感器测量和提取得到的发动机运行过程数据,对发动机的工作状态有无异常做出可靠判断;故障诊断是根据经验和推测所获得的异常状态信息,对发生故障的类型、程度和部位进行分类诊断,从而确定故障时间、估计故障程度并实现故障模式的分离[4]。已有文献[10]对故障检测和监控进行了详细的综述。近年来基于人工智能的液体火箭发动机得到了应用和广泛重视[4]。
本文目的是汇总分析故障模式及监控信号,总结分析液体火箭发动机故障诊断研究的进展。
1 液体火箭发动机的故障模式研究
液体火箭发动机发生故障的机理复杂,包括单一机理和耦合机理。文献[5]基于泵压式液体火箭发动机的故障统计数据和故障事件等,总结了发动机故障的模式;文献[11]以国内4种泵压式液体火箭发动机研制历史为基础,提出发动机常见的故障模式;文献[12]对YF-75液体火箭发动机故障模式进行分析;文献[13]针对某定型大型液体火箭发动机,论述了可能出现或已发生的故障模式;文献[14]总结了发动机常见故障模式;文献[15]收集了各种发动机试车故障情况,把故障类型分为6大类;基于已有文献研究成果,归纳液体火箭发动机主要故障模式如表1所示,其中大部分故障与涡轮泵有关[16],涡轮泵故障率最高[11,14]。
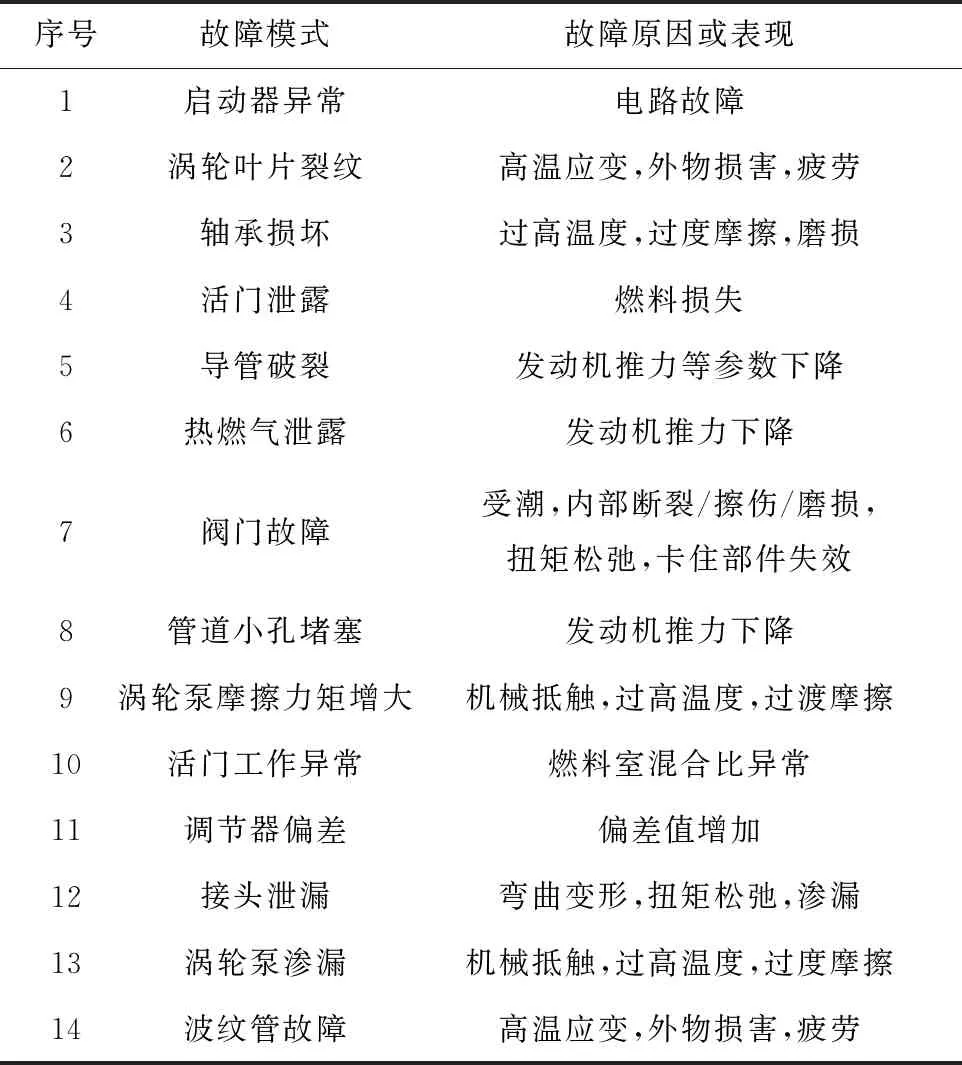
表1 泵压式液体火箭发动机主要故障模式
在对液体火箭发动机进行故障诊断之前,需要提取发动机运行过程中的信号。由于液体火箭发动机结构紧凑,传感器布置位置和数量受到限制,导致液体火箭发动机信号表征不强,给其物理信息的获取带来困难,常见的传感器监控信号如表2所示。
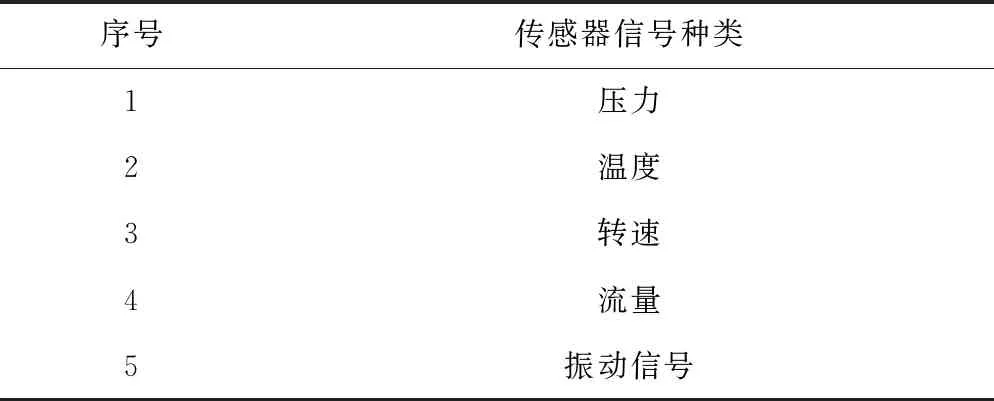
表2 常见液体火箭发动机监控信号
根据采集信号方式可将传感器数据分成运行中的连续时序数据和状态参数的离散数据两大类[4],可以根据传感器采集到的数据进行故障诊断。针对不同的信号选取种类和处理方法,现有的故障诊断方法包括基于模型、基于信号分析和基于人工智能的故障诊断[5,17]。
2 基于模型的故障诊断
2.1 基于时间序列算法的故障诊断方法
时间序列算法(ARMA)是用较早的信号来评估目前的信号,以信号结构模型实现对故障的检测[5,17]。基于ARMA的模型已被用于稳态工况下快速性和振荡性故障的检测。该方法具有良好的鲁棒性、实时性和实用性,国内外对此做了大量的研究。
2000年,王建波[18]介绍了用ARMA模型对YF-75发动机中出现的的泄漏故障进行分析检测的方法。基于不同的检测参数时间序列构建自回归模型,模型的判别函数为Kullback-Leibler信息测度。该方法具有预警及预测能力,能实现泄漏故障的实时预测。针对重复使用火箭发动机,基于ARMA模型的实时故障诊断系统[19]仿真分析表明该算法能成功诊断出发动机的常见故障,并进行报警。2020年,邓晨等[20]针对新一代大推力氢氧补燃循环液体火箭发动机主级工况,开发了基于ARMA模型的实时故障诊断算法、故障阈值求解方法及判别准则,证明了改进算法的高效性及有效性。此外,刘冰[21]、刘英元[22]等先后利用故障信号提取的方式对检验模型进行了验证。
还有学者使用AR-CGARCH模型进行故障检测,避免了传统自适应阈值算法对时间序列方差跟踪能力不足,以及故障阶段带宽自动放大的问题[23],证明时间序列分析的诊断方法在液体火箭发动机故障诊断领域有极大的发展潜力,
2.2 基于数学模型的故障诊断
1994年,张育林[24]等针对泵压式供应系统液体火箭发动机提出了故障检测与故障诊断的基本框架,如图1所示。建立了基于发动机系统燃烧室压力、燃烧室组元比、燃气发生器室压等11个状态变量的非线性数学模型,研究了推广的卡尔曼滤波的故障检测方法和基于低阶线性模型的故障诊断方法。
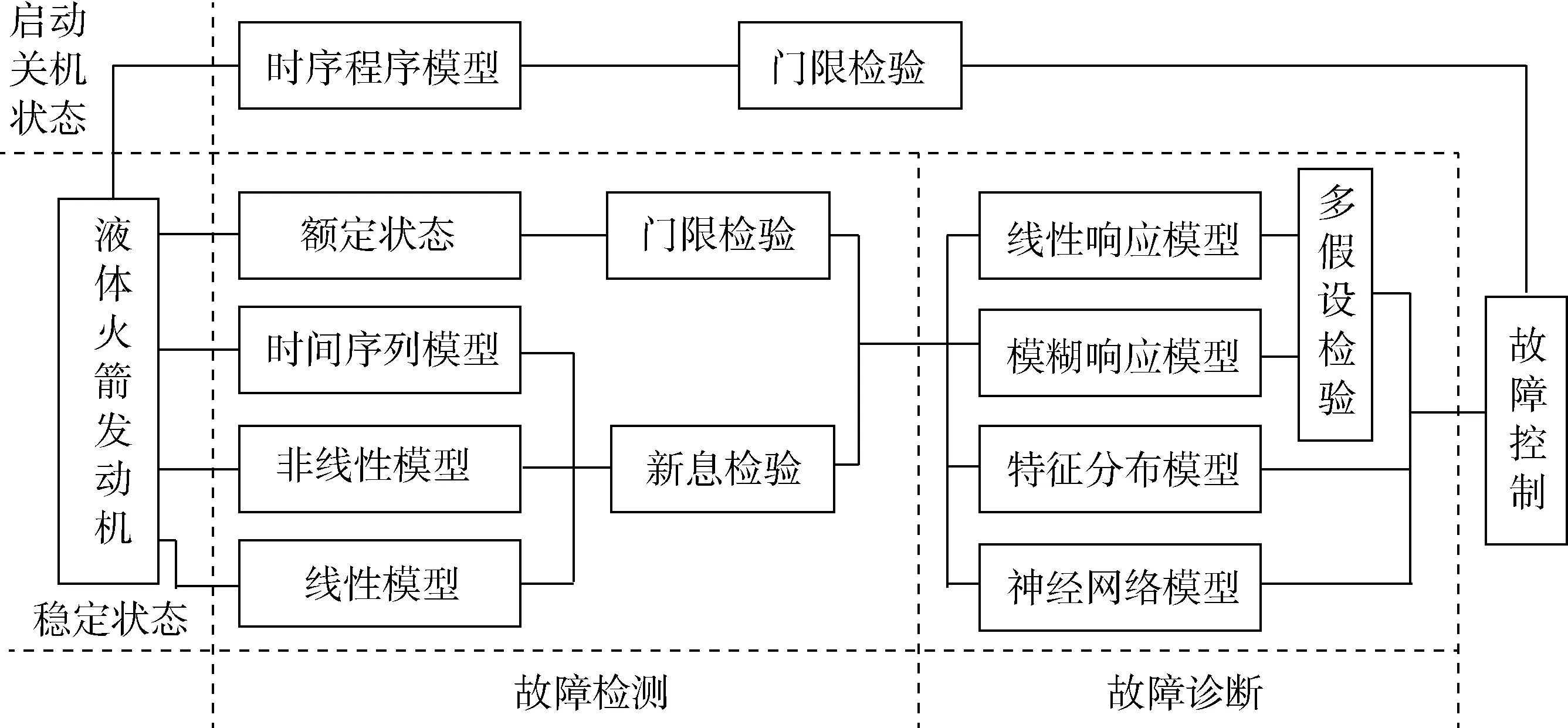
图1 故障诊断系统与研究框架[24]
1997年,吴建军等[25]基于液体火箭发动机故障诊断方法实时验证的需求,将发动机全阶非线性数学模型进行针对性优化,建立起发动机降阶非线性动态模型,可以用来模拟发动机随机动态特性。该模型在精确性、实时性等方面可以满足实时性验证的要求。朱恒伟[26]提出基于静态方程形式的故障诊断策略,但该策略存在测量参数不足与反馈回路的问题,导致故障影响参数传播、故障诊断有效性受到影响。针对以上问题,提出了反映部件特性的故障诊断策略,能够实现与已有基于系统方程的诊断系统相一致的诊断效果。王硕等[27]基于运载火箭的动力学与运动学模型提出一种带遗忘因子的多信息融合最小二乘算法,仅利用导航敏感器件的惯性测量信息,就实现了发动机的在线故障诊断,并通过仿真验证了该方法的适应性和准确性。
根据模型的故障诊断方法,能够反映大量发动机实际系统特性,虽已具备理论依据,但仍需要实际试车检验[28]。液体火箭发动机系统非常复杂,特别是其强非线性特性导致难以构建精准的数学模型,限制了基于模型故障诊断方法的应用。
基于系统辨识的模型能够捕获复杂物理过程,这种非线性数学模型更为简单、明确[29]。Kyelim Lee等[30]针对开式循环液体火箭发动机稳态故障诊断,提出了基于卡尔曼滤波和故障因子法的故障检测与诊断算法,该算法由阈值法、白度法、GLRT法和MM法组成。通过对开式循环全推理液体推进剂火箭发动机进行数值模拟,验证了卡尔曼滤波算法在识别传感器或内部元件故障发生位置方面的有效性,以及故障因子法在快速检测内部元件故障发生的时间和位置方面的有效性。薛薇等[31]针对氢氧发动机的故障诊断,设计并构建了递归结构识别(RESID)模型,该模型以递归方式建立不同特征之间的相互关系,构建一个更高阶的非线性回归方程作为判别函数,并且通过半实物仿真验证了该方法的有效性。
基于模型的故障诊断在原理上具有最高的精度,但由于液体火箭发动机中各部件强耦合,故障的结构参数维度通常远大于传感器能提供的参数维度,导致模型无法求解、建模难度及成本过高;另外基于模型的故障诊断的前提是有大量的发动机故障先验知识,诊断结果的准确性直接依赖于所建立的数学模型与实际系统的相符程度。因此,仅从模型的角度出发难以满足液体火箭发动机故障诊断的精度和速度要求,需要借助传感器信号等具有结构和故障表征能力的数据进行分析。
3 基于信号分析的故障诊断方法
3.1 基于振动信号的故障诊断
液体火箭发动机在运行过程中会产生振动,这些振动可以引起系统故障,进而影响到整机性能。液体火箭发动机的振动包含了发动机的运行状态和发动机结构等信息,其变化范围在几赫兹到几十赫兹变化。利用动态测试仪对振动信号进行捕捉、处理、分析,能够得到液体火箭发动机的运转信息,进而对发动机的健康情况和系统性能作出评估,并进一步诊断故障[5]。
振动信号可以采用时域、频域、时频域的方法进行分析。在时域内,其分析指标包括幅值、周期、上升时间和下降时间等。在频域内,其分析方法包括FFT、高频谱分析、STFT、倒频谱分析等。在时频域内,分析方法主要包括小波分析、WD分布等[5]。
截至1990年,用于航天飞机主发动机振动监测的飞行加速度安全关机系统FASCOS,参加了多次地面试车[32],但由于仪器设备可靠性低,该系统未被用于飞行试车。1997年,针对YF-75发动机涡轮泵振动信号,朱恒伟[26]开发简单实用的振动信号实时检测方法;开发了基于比较细致的信号频域特征和神经网络的振动故障方法,计算复杂度较高,可进一步扩展为故障诊断方法[33]。
1996年,马歇尔空间飞行中心开发了针对涡轮泵振动分析的航天发飞机主动机实时振动监测系统(RTVMS)[34],提高了涡轮泵设备的安全可靠性。1999年,RTVMS缩减版被引入参与了实际飞行试验,该系统至今已为150台次高压涡轮泵静态试验提供主动振动监测,且从未出现系统故障。
2008年,夏鲁瑞等[35]分析了汽轮泵转子叶片断裂脱落的典型故障原因,并采用动态分析的方法,研究了故障的振动特征,选择了能有效揭示涡轮泵转子叶片断裂脱落典型故障的频率特征;通过变换处理找出了速度变化对振动频率的影响,提取出稳定的频率特征。结合汽轮泵历史试验中的故障数据,通过跟踪特征频率的幅值变化,可以有效地检测和诊断汽轮泵转子叶片的断裂和脱落故障,频率特征提取的原理框图如图2所示。
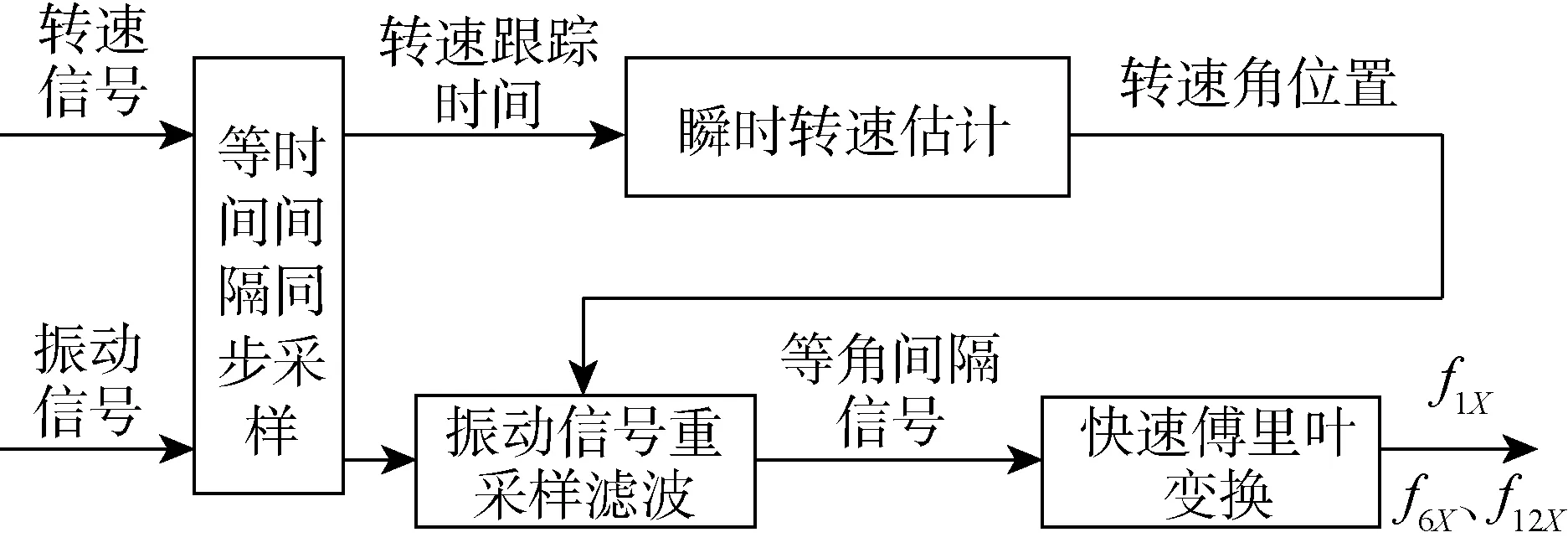
图2 频率特征提取原理图[35]
3.2 基于羽流光谱技术的故障诊断
液体火箭发动机部件发生故障时,如涡轮泵、阀门和喷注器发生老化、磨损或烧蚀时,一些金属杂质会从燃烧室进入羽流[36]。高温时这些金属杂质能发射出足够强的可见辐射和紫外光谱用于检测。羽流光谱技术具有误诊率低、算力要求较低、非侵入式、覆盖信息广等优点,自1986年至今,取得了很大的发展。美国研制的羽流光谱故障检测与诊断系统,成功应用于航天飞机主发动机的地面试车健康监测。2001年,赵永学[36]通过仿真及实验,研究了YF-75发动机故障的羽流光谱和气氧/煤油火焰辐射光谱、模型发动机羽流辐射光谱,表明基于羽流辐射光谱的故障检测技术非常适合发展为发动机健康监控及故障诊断技术。
相对基于模型的方法,信号分析的诊断方法拥有更佳的实时性,并已经实际应用在多种型号液体火箭发动机中。然而,该种方法对信号质量要求较高,由于液体火箭发动机实际运行工况变化剧烈,采集信号包含大量噪声;并且发动机传感器本身存在高漂、通道丢失等故障,所以依赖单一传感器信号故障诊断的误诊率较高,而信号之间的耦合问题又给多信号综合分析带来了极大挑战,实际过程中收集到的数据往往不能达到精度要求,这在一定程度上限制了基于信号分析的故障诊断方法的应用。
4 基于人工智能的故障诊断
4.1 基于专家系统的故障诊断
基于专家系统的故障诊断方法,是在大量的专家系统知识库基础上,推理机在一定的推理机制下,运用知识进行诊断推理。目前已研发的发动机故障检测与诊断的专家系统包括AEROJETT公司研制的基于规则的Titan健康评估专家系统、LeRC开发的试车后数据自动评估系统、MSFC联合Alabama大学开发的发动机数据解释系统等[10]。专家系统还可以与发动机静态数学模型相结合,在参数估计方法中引入专家系统推理过程的故障诊断策略[26]。
4.2 基于模糊理论的故障诊断
液体火箭发动机故障诊断过程存在各种不确定性,包括设备测量精度误差、系统环境干扰噪声、模型及故障描述的不精确性等。基于模糊理论的方法仅基于数据特征,因此在处理系统复杂性和不确定性方面具备一定的优势[37];该类方法主要为基于模型聚类、基于模糊模型、基于模糊理论与其他方法相结合的方法。基于模糊模型的故障诊断方法,基于黑箱模型、历史数据或其他知识,建立模糊模型模拟输入输出对象的对应关系,通过模型输出与实际输出的比较结果实现故障检测与诊断[10]。
谢涛等[38]基于最大隶属度原则的模糊聚类方法识别火箭发动机故障模式,基于模糊熵与方向相似度的液体火箭发动机故障检测方法[39],采用基于广义模糊熵的模糊Kohonen聚类网络作为滑动数据窗口的聚类算法,对强干扰噪声工况的鲁棒性和适应性得到显著提升[40]。周宵鹏等[41]提出了基于改进型可能性C-均质聚类和故障向量理论的故障诊断方法。董周杰等[42]利用提出一种基于数据驱动的综合模糊聚类算法用于故障诊断,只需要少量先验正常样本数据就可以快速、准确检测出故障的发生。王冠等[43]基于模糊聚类和LSTM网络,提出了一种数据驱动的运载火箭发动机氧涡轮泵数据异常分析方法,通过模糊聚类对标签不完整的数据样本进行预分类,得到完整的标签并且分析特征贡献度,显著增强了系统故障检测的能力。
模糊理论可以与专家系统、神经网络等相结合,实现更有效的故障诊断[43-47]。
4.3 基于遗传算法模型的故障诊断
遗传算法已经广泛运用在机器学习、信号处理、组合优化等领域。2008年,杨晋朝[3]将液体火箭发动机故障检测与诊断中的关键技术问题转化为相应的优化问题,并用遗传算法和量子遗传算法加以解决,提出了将遗传算法与BP神经网络深度交叉混合的遗传神经网络。性能分析表明,该算法相比于BP算法更易于找到全局最优解,同时克服了遗传算法搜索性能相对较低的问题;该算法还能够避免通过经验数据方法选用权值和阈值的弊端,能够较全面、充分地表达诊断故障的特征信息,提高神经网络非线性映射的能力。Yu等[44]提出了一种自适应遗传算法优化的BP神经网络的液体火箭发动机实时故障检测方法,仿真分析结果表明,该方法检测结果比BP神经网络模型更接近实际,效果更快。在遗传神经网络模型中,采用遗传模糊C均质算法,使聚类算法具有更好的搜索结果和较优的目标函数值,分类错误率更低,能够全部准确监控正常试车数据,并准确诊断出两次发动机故障[1]。李宁宁等[48]针对BP神经网络容易受到局部极小点的缺点,用遗传算法来优化BP网络,构建了发动机工作过程的非线性辨识模型,并使用历史数据与BP神经网络故障检测模型进行对比,验证了该方法可靠性和精确性。
4.4 基于决策树模型的故障诊断
决策树是一个类似于流程图的树状结构,将分类和决策作为目的,以实例为基础进行归纳学习。决策树方法将专家诊断知识隐含在整个决策树的各个叶节点和内部节点上,根据节点属性及取值体现诊断知识的条件部分,叶节点指向知识结论部分[49]。
2007年,韩泉东等[49]以泵压式液体火箭发动机为研究对象,针对故障特征难以提取的问题,提出了在大量试车数据的基础上,应用决策树方法提取故障特征并进行稳态段故障检测与诊断的思路,对某型发动机大量热试车数据进行了实例分析,将得到的故障检测和诊断结果与神经网络等方法所得结果进行了比较,并利用仿真数据对该方法的性能进行了进一步验证,结果表明,决策树方法是一种有效、可靠的火箭发动机故障检测与诊断的新途径。
4.5 基于神经网络模型的故障诊断
神经网络凭借其具有的高度自适应能力和极强的容错性等特点,在火箭发动机故障诊断领域得到了极大的发展[50-52]。主要的神经网络模型有自适应共振理论ART神经网络、反传BP神经网络、动态神经网络等[5]。
ART属于无监督自适应神经网络,可以对二维模式进行自组织和大规模并行处理。ART-2模型对于非平衡、不可预测的故障检测环境,具有自稳定、自组织和弹性应变等特点。该类神经网络的主要原理为:将测量数据经快速傅里叶变换后,得出功率谱密度分布,再根据该功率谱密度与通过学习算法获得的权值数据计算其欧氏距离,通过检验获得其具有最小值的点,从而实现故障的分类检测。经过训练的ART-2神经网络,可形成分别表征正常状态和故障状态的权值数据,试验输入输出故障检测与诊断系统经对比分类,得到正常状态或有故障特征的输出结果[11]。
反传BP神经网络可将传统的故障模式识别及分类方法中的三步,即测量、特征提取、分类,融合在一起,自动提取故障特征。
动态神经网络用于发动机故障检测时,不需要发动机系统的工作特性模型,仅通过基于传感器测量数据,即可根据状态特征辨识产生的残差值来检测故障,并通过辨识残差相关函数对故障类型实现分类,满足对故障检测与分离的实时性工程要求[5]。
1998年,王建波等[53]提出了基于径向基函数神经网络的液体火箭发动机动态过程建模,仿真结果表明可以达到很好的逼近精度;2000年,于达仁等[54]以一个典型的泵压式液体火箭发动机为对象,针对发动机的几种泄露故障,用自组织网络识别降维样本,仿真发现自组织网络可以对发动机的泄露故障模式进行很好的聚类。
2001年,张炜等[55]针对液体火箭发动机系统多故障同时发生的现象,通过分析故障的特征表现建立涡轮泵系统的标准故障模式,在此基础上提出并采用并行BP神经网络进行多故障诊断分类的方法,结果表明基本BP神经网络对于给定的训练样本能够较好地实现模式表达;杨尔辅等[56]提出了一种应用故障机理模型和SOM(Self-organization Mapping)神经网络的实时故障诊断方法,以解决单纯依靠故障机理模型进行诊断时遇到的实时性问题和单纯依靠SOM神经网络诊断时遇到的故障样本获取问题;2009年,杨晋朝等[57]将遗传算法与BP神经网络深度交叉融合,克服了遗传算法以类似穷举的形式寻找最优解导致算力要求过高、BP算法易陷入局部最优解的缺点。
2011年,刘垠杰等[58]将云模型与BP神经网络以串联方式有机结合,利用云变换方法针对网络结构辨识和云模型进行特征提取,通过在输入层引入单位延时处理来描述发动机工作过程中的动态特性,提出了基于动态云BP网络的液体火箭发动机故障诊断方法。该方法能准确识别发动机已有的3种故障模式,单步运行时长为1.124×10-4s,完全满足实时性要求,云神经网络的结构如图3所示。
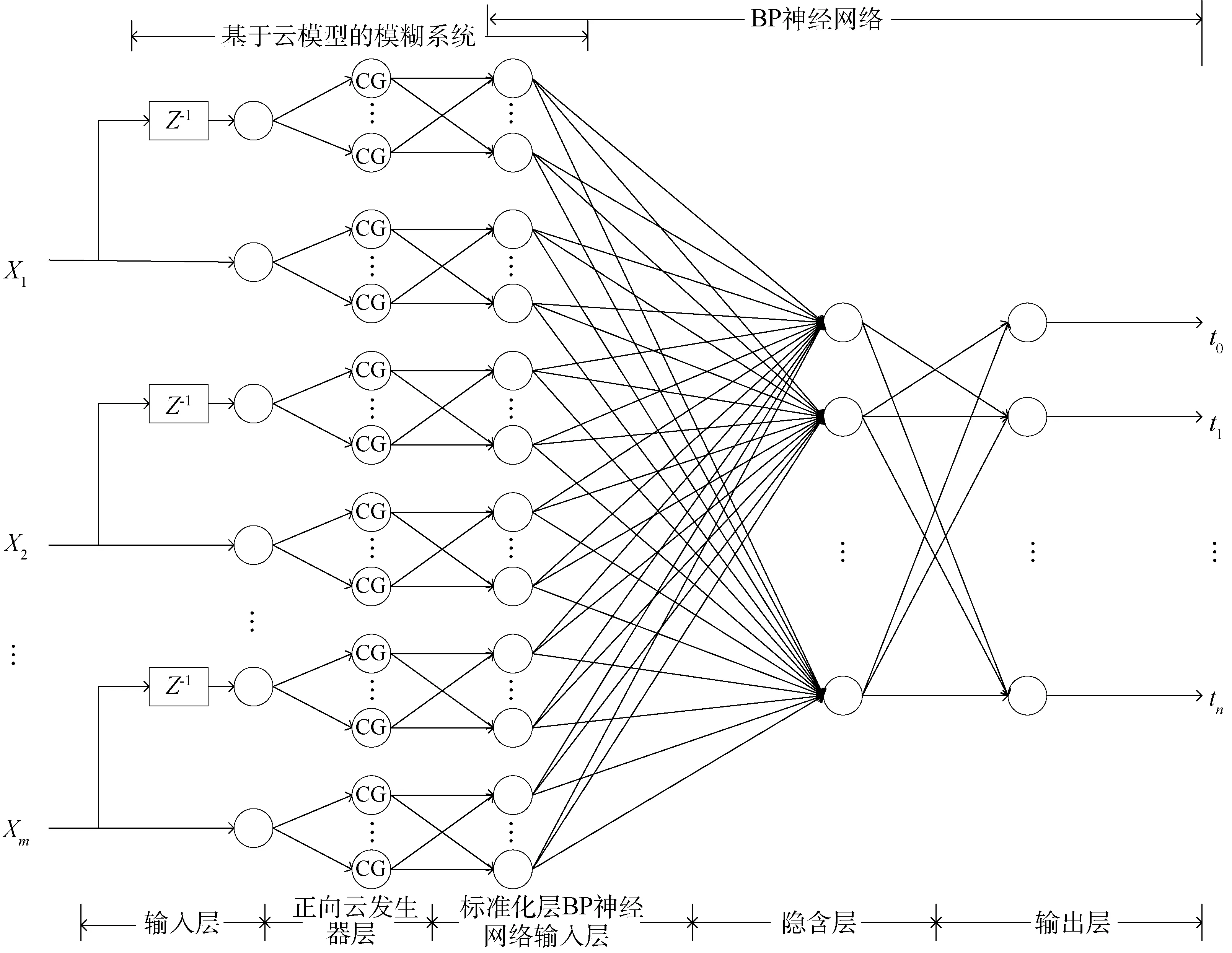
图3 云神经网络结构[58]
2013年,彭小辉等[59]针对当前模式分类方法难以处理不确定性信息、属性特征空间的划分过硬等缺陷,结合云模型和云变换研究,提出了一种基于云分类器的液体火箭发动机起动过程故障诊断方法,相比于包络线算法、BP神经网络算法、RBF神经网络算法和红线关机算法的故障检测性能,该算法在诊断及时性上有一定进步。
2020年,Park等[60]使用数值模型构建发动机启动期间潜在故障类型的数据集,来训练神经网络,故障诊断基于CNN-LSTM,该方法与传统的红线截止相比具有优越的二元/多分类性能,并证实了该方法对实际液体火箭发动机的适用性。
4.6 基于主成分分析的故障诊断
主成分分析(PCA)作为一种数据降维方法,已被应用于故障诊断任务中。该方法基于数据生成主成分,在测试时根据测试数据主成分与正常数据的偏离值进行阈值判断,进而诊断故障[61]。张振臻等[62]提出一种与滑动时间窗结合的PCA故障诊断方法,基于发动机试车数据进行验证,该方法可以实现对4种常见传感器故障和2种发动机试验故障进行诊断。
4.7 基于支持向量机模型的故障诊断
支持向量机(SVM)建立在统计学习理论的基础上,是一种更为前沿的的机器学习分类方法。SVM有着严格的理论和数学基础,通过最小化经验风险,在有限的学习精度和学习泛化能力之间寻求最佳折中。支持向量机能够克服传统机器学习中过学习、局部值极小等问题。实际过程中样本数目往往有限,支持向量机专门针对小样本,具有巨大的应用潜力。
支持向量机的基本思想可以用二维最优超平面示意图进行说明[63],如图4所示。图中,实心和空心点代表两类样本,H1和H2代表分类线。如果H1和H2正确地将两类样本分开,则间隔最大的分类线即为最优分类线[63]。推广到高维空间,最优分类线即演变为最优分类面。其核心思想是在进行分类时,对于线性不可分样本,通过非线性映射(核函数),将原空间样本映射到高维特征空间(核空间),使得在样本核空间中线性可分或近似线性可分,从而在核空间中进行线性分类[3]。
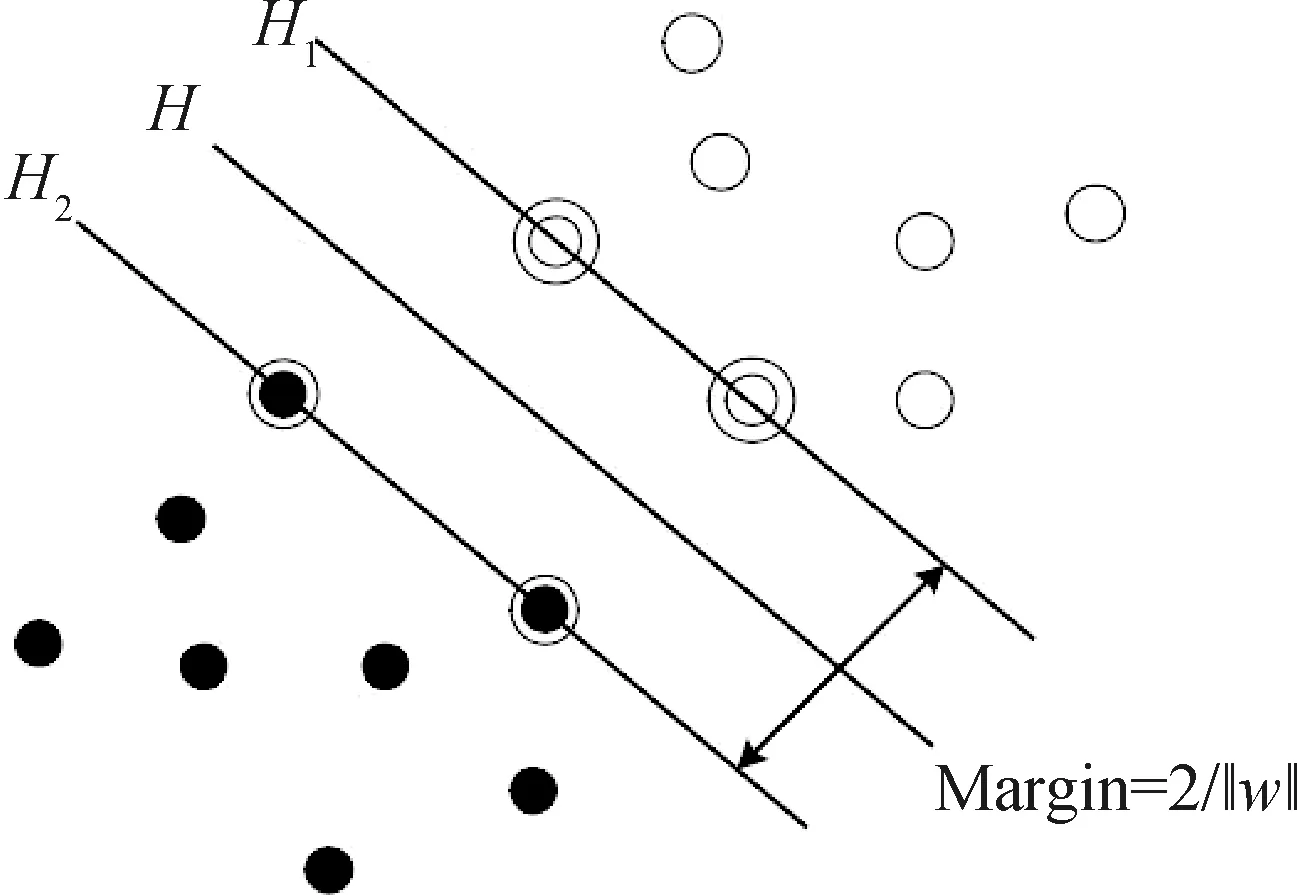
图4 最优超平面示意图[63]
2007年,韩泉东等[63]将支持向量机模型用于某种大型液体火箭发动机稳态试车数据挖掘,建立了多故障分类器,如图5所示。基于23次试车数据对挖掘结果进行测试,并用28类仿真稳态故障数据进一步验证,结果表明,支持向量机是基于小样本、有效的液体火箭发动机故障检测和诊断方法。
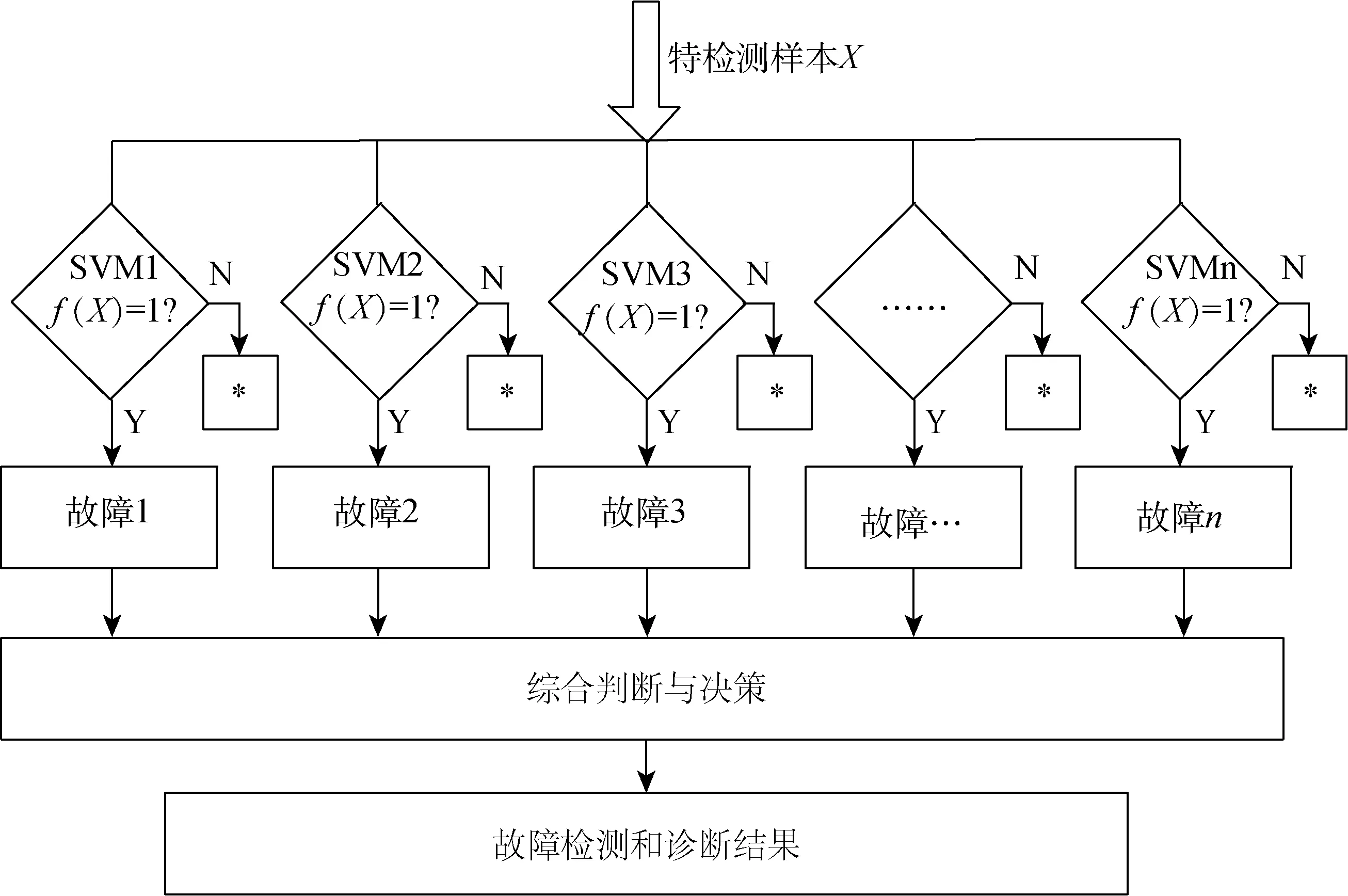
图5 多故障分类器流程图[63]
何浩等[64]用SVM对液体火箭发动机的故障数据进行检测和诊断。通过学习发动机仿真模型中的9种数据,检测出18组数据中的17组,有4组出现误报,进而对误报故障进行二次学习和再检测,能正确检测这4种故障。经过对C75试车4种故障数据的学习,能正确检测其故障类型,进一步验证了该方法的正确性和可行性。
郭小凤等[4]针对试验参数多样、数据复杂且相关等特点,研究了基于PCA-SVM的液体火箭发动机试验台故障诊断方法,基于主元分析法进行原始数据特征工程、基于累计贡献率函数选取主元数目,降低了数据维数和计算复杂度;采用了基于聚类的二叉树方法,建立了多故障分类器模型,解决了标准支持向量机不适用于多值分类的问题。基于主元分析和支持向量机的试验台故障诊断分类器,在小样本情况下识别率高于BP神经网络,具有较高的识别率、更好的分类性能、更高的诊断精度。
单类支持向量机算法[65]、双阈值单类支持向量机在线检测算法[66],以及基于凸频分量均方根和支持向量机的故障检测算法[67],使得支持向量机模型在故障检测方面得到了进一步应用,并为支持向量机在故障诊断中的应用开辟了空间。
不同的人工智能方法的理论基础不同,应用特点也存在差异,本文针对不同的故障诊断方法,从所需基础、优点和缺点等3个方面进行对比分析,如表3所示。由于液体火箭发动机实验成本较高,试车数据量小,获得故障状态数据困难,因此目前能够处理小样本的决策树、支持向量机等传统机器学习模型拥有更佳的表现和更广泛的应用[64]。但在未来实验数据量积累到一定程度或使用仿真手段获得大量数据的背景下,拥有更大模型容量的深度学习模型是值得探索的方案。
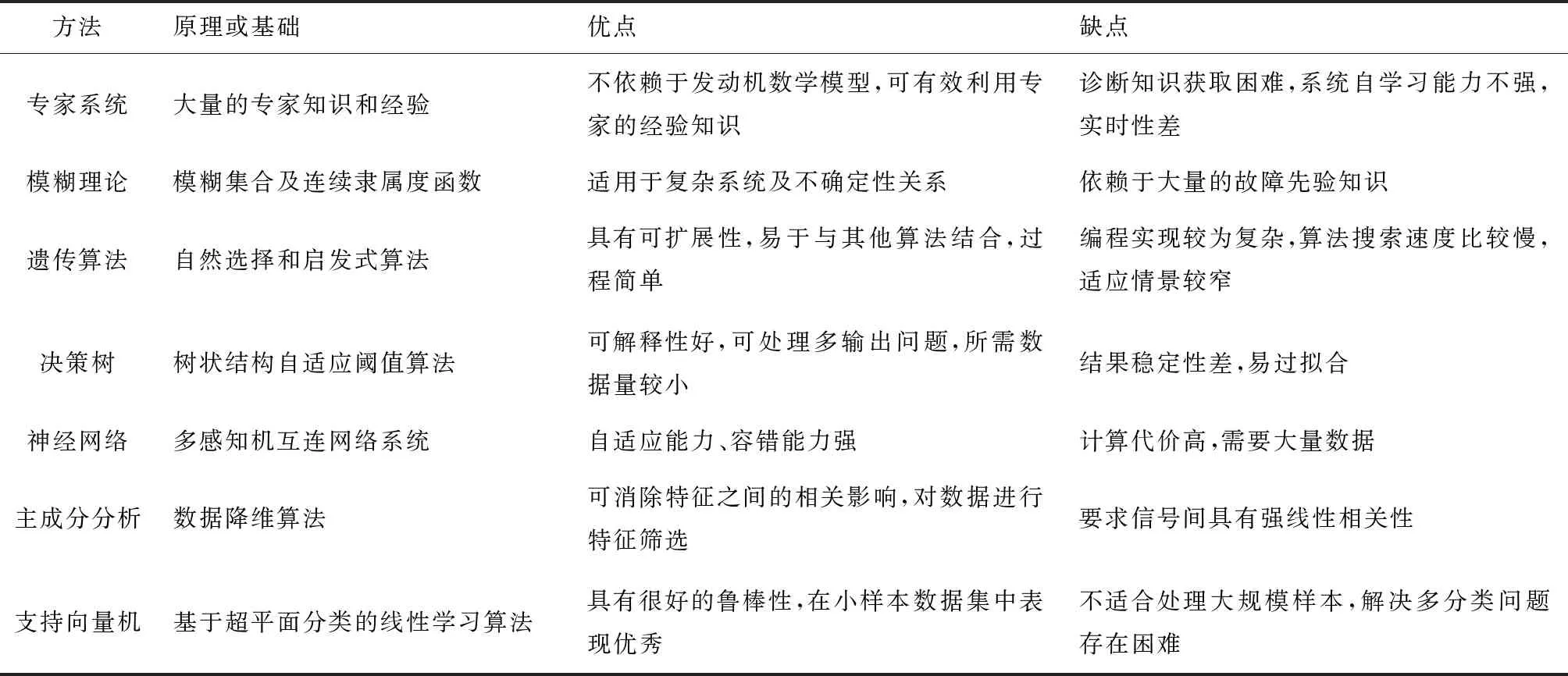
表3 基于人工智能的故障诊断方法的对比分析
5 结论
现代计算机技术、先进传感器技术、信号处理技术、人工智能技术,液体火箭发动机故障诊断技术正朝着智能化,高效化,泛化的方向发展。但部分故障特征相似、传感器参数耦合带来的影响以及大容量模型带来的预测速度慢和实时性差等问题仍制约着液体火箭发动机故障诊断技术的发展。
未来需继续完善故障数据库,并进一步识别故障模式;发展解耦算法,准确提取识别故障特征的关键数据;改进优化目前已有的算法或开发新的算法,以满足高效性和实时性的要求。
