城市交通系统双区域边界控制的模型预测控制方法
2023-03-11吴超云
李 妍,吴超云
(安庆师范大学 数理学院,安徽 安庆 246133)
随着城市的发展,城市上下班高峰期的交通拥堵现象越发严重,为缓解拥堵,城市交通系统的管理和宏观控制被广泛研究。GODFREY在1969年最先提出宏观基本图(Macroscopic fundamental diagram,MFD)的概念[1]。在过去几十年里,城市交通系统MFD 的存在性已被广泛证实[2-6],并提出了大量基于MFD的宏观控制策略,包括最优控制[7]、区域交通总量动态调控技术[8]、协作控制[9]、多区域边界控制[10]和鲁棒控制[11-12]等。2012年GEROLIMINIS等建立了两个区域的边界流量最优控制模型,并用模型预测控制方法来最优化交通系统的行程完成量[7]。2014年杜怡曼等以北京市西二环为例,基于宏观基本图及区域总量动态调控为主、传统优化为辅的交通管理新手段,通过区域边界设置的反馈闸门控制网络流入量以提高区域通行效率[8]。2013 年HADDAD 等研究了高速公路和两个城市区域网络组成的大型混合交通网络的协作控制问题[9]。ABOUDOLAS等建立了多区域边界控制模型[10],采用模型预测控制、协调控制、自适应控制等多种控制方法。来提高交通系统效率和缓解交通拥堵,2014年HADDAD等为处理宏观基本图的不确定性,对城市核心区域建立了鲁棒边界流量控制,通过控制边界流量来稳定核心区域的累积量[11]。2021年LI等考虑排队长度,建立了两区域的鲁棒边界控制模型[12],实验结果表明鲁棒边界控制方法能有效缓解高峰期交通拥塞,并提高交通系统效率。
模型预测控制(Model Predictive Control,MPC)最早产生于20世纪70年代,又称为滚动时域控制或后退时域控制;1978 年,RICHALET 等归纳了预测控制算法的三要素:预测模型、滚动优化和反馈控制[13]。由于MPC具有滚动优化策略,即在线反复进行优化计算且滚动实施,使模型失配、畸变、扰动等引起的不确定性及时得到弥补,从而获得较好的动态控制性能,因此通常用于预测交通系统,并实施交通系统管理。2019 年YE 等人概述了MPC 在交通信号控制中的应用[14]。另外,学者们提出了诸多基于MPC 控制的交通控制策略,包括用MPC 来解决边界控制问题[15]。2014 年FREJO 等提出了双区域MFDS 非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)方案[16],2019 年KIM 等针对大规模路网边界控制问题,提出了一种新的分布式模型预测方法[17]。
以上区域控制模型没有考虑状态变量和控制变量的稳定性问题,本文建立了一个双区域边界控制模型,并考虑了两个区域累积量和控制变量的稳定性,同时采用模型预测控制方法对模型进行模拟分析。区域累积量的稳定性可使区域累积量尽量接近稳定状态,从而避免交通拥堵并提高交通效率;控制变量的稳定性可使控制变量尽快稳定,从而降低控制成本。
1 城市交通系统双区域边界控制模型
城市交通系统被划分成两个相邻的同质区域,双区域边界控制如图1 所示。其中,n1(t)(veh)和n2(t)(veh)分别表示t时刻区域1和区域2的累积量,即车辆数。Gi(x)(i=1,2)(veh/s)表示第i个区域的MFD,每个MFD则表示该区域内的累积量与域内车辆完成行程量的函数关系,一般由一个一元三次多项式函数Gi(x)=ai·x3+bi·x2+ci·x表示,其中ai,bi,ci是估计的参数。G1(n1(t))表示t时刻累积量为n1(t)时在区域1中的完成行程量,G2(n2(t))表示t时刻车辆数为n2(t)时在区域2中的完成行程量。·G1(n1(t))表示在区域1 中已完成的行程,并且已到达目的地的车辆数;G1(n1(t))表示在区域1中已完成的行程,未到达目的地(目的地是区域2)的车辆数。q11(t)(veh/s)、q12(t)(veh/s)和q2(t)(veh/s)分别表示交通需求量,q11(t)和q12(t)表示区域1中每秒新增的车辆数,目的地分别为区域1和区域2,q2(t)表示区域2中每秒新增的车辆数。n11(t)(veh)和n12(t)(veh)表示区域1中目的地分别为区域1和区域2的累积量,故有n11(t)+n12(t)=n1(t)。u(t)是控制变量,表示t时刻区域1 转移到区域2 的车辆比例,用以控制两个区域间车辆的转移,其满足0 ≤u(t)≤1。当u(t)=0时,禁止区域1中的所有车辆驶向区域2;当u(t)=1 时,不限制区域1 的车辆驶向区域2。n11,0,n12,0,n2,0分别是初始时刻t0的累积量。n1,jam和n2,jam分别是区域1 和区域2 的阻塞累积量。umin,umax分别是u(t)的下限和上限,n11,s,n12,s,n2,s,us分别是状态变量n11(t),n12(t),n2(t)和控制变量u(t)的稳定状态。Qr∈Rnn*nn,Rr∈Rnu*nu是对称的正定权重矩阵。以系统累积量和控制变量的稳定性为目标,建立的双区域边界控制模型如
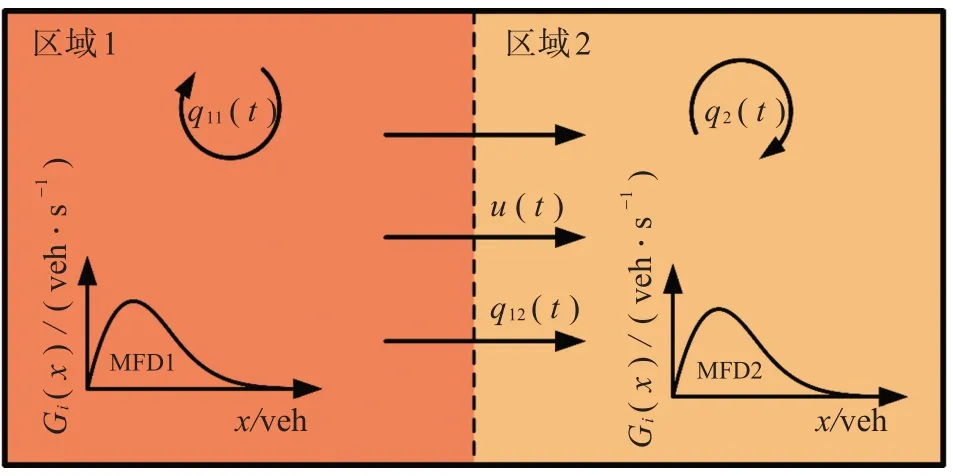
图1 双区域边界控制(控制器u(t)限制车辆从区域1流向区域2)
2 模型稳定性分析及MPC控制设计
3 数值模拟
为研究模型的控制效果,分别模拟了交通需求量q11(t),q12(t),q2(t)为常数和非常数时双区域边界控制模型的交通性能。本文MPC控制器的参数为Np=60和Nc=30,t=3600s,umin=0和umax=1分别控制变量的上限和下限。区域1的MFD为G1(n)=(1.4877×10-7n3-2.9815×10-3n2+15.0912n)/3600,区域1 拥塞累积量为n1,jam=10 000,临界累积量为n1,cr=3400,临界累积量对应最大的完成行程量为G1(n1,cr)=6.3(veh)。区域2的MFD与区域1相同,图2是两个区域的宏观基本图。

图2 宏观基本图
3.1 交通需求为常数时双区域边界控制模型模拟结果
当交通需求为常数时,模拟交通系统初始状态拥堵和不拥堵两种情形。当初始状态拥堵时,设两个区域的初始累积量分别为n11(0)=3600,n12(0)=1900,n2(0)=5500。交通需求为常数,q11=0.25,q12=2.8,q2=3.2,满足稳定条件。由于n1,cr=n1,s=3400,n2,s=4 200,可以计算出n11,s=135,n12,s=3 265,us=0.463。双区域边界控制模型模拟结果如图3 所示。当不控制时,车辆涌入区域2,区域1 的累积量在前1 800 秒迅速下降,在2 580 秒降到880 辆(图3a),此时区域2 的累积量在1 445 秒(图3b)时就已达到10 000 辆,且区域2 的完成行程量为0,故系统双区域完成行程量在2 580秒降到最低值3.1(图3c),即系统陷入死锁状态。在MPC控制情况下,在前510 秒u(t)=0(图3d),禁止车辆从区域1驶向区域2,从而区域1的累积量在从5 500辆略微升高到5 700辆(图3a);区域2交通拥堵得到控制和疏散,且累积量逐渐降低,在510秒时降低到4 200辆并达到稳定状态(图3b)。然后,控制器在510秒由最大值1开始缓慢下降,即限制区域1的车辆驶向区域2,促使区域1的累积量缓慢降低,区域2的累积量稳定。在3 000秒时,区域1的累积量减少到3 450辆,逐渐达到稳定;区域2的累积量稳定不变,在2 600秒以后,u(t)达到稳定值0.467。图3c显了示系统随着两个区域累积量的逐步稳定,车辆的完成行程量逐渐增加,在2 400 秒时增加到12.3,交通性能最佳。因此,在MPC控制下,可以逐步降低系统累积量,缓解交通拥堵并疏散交通。
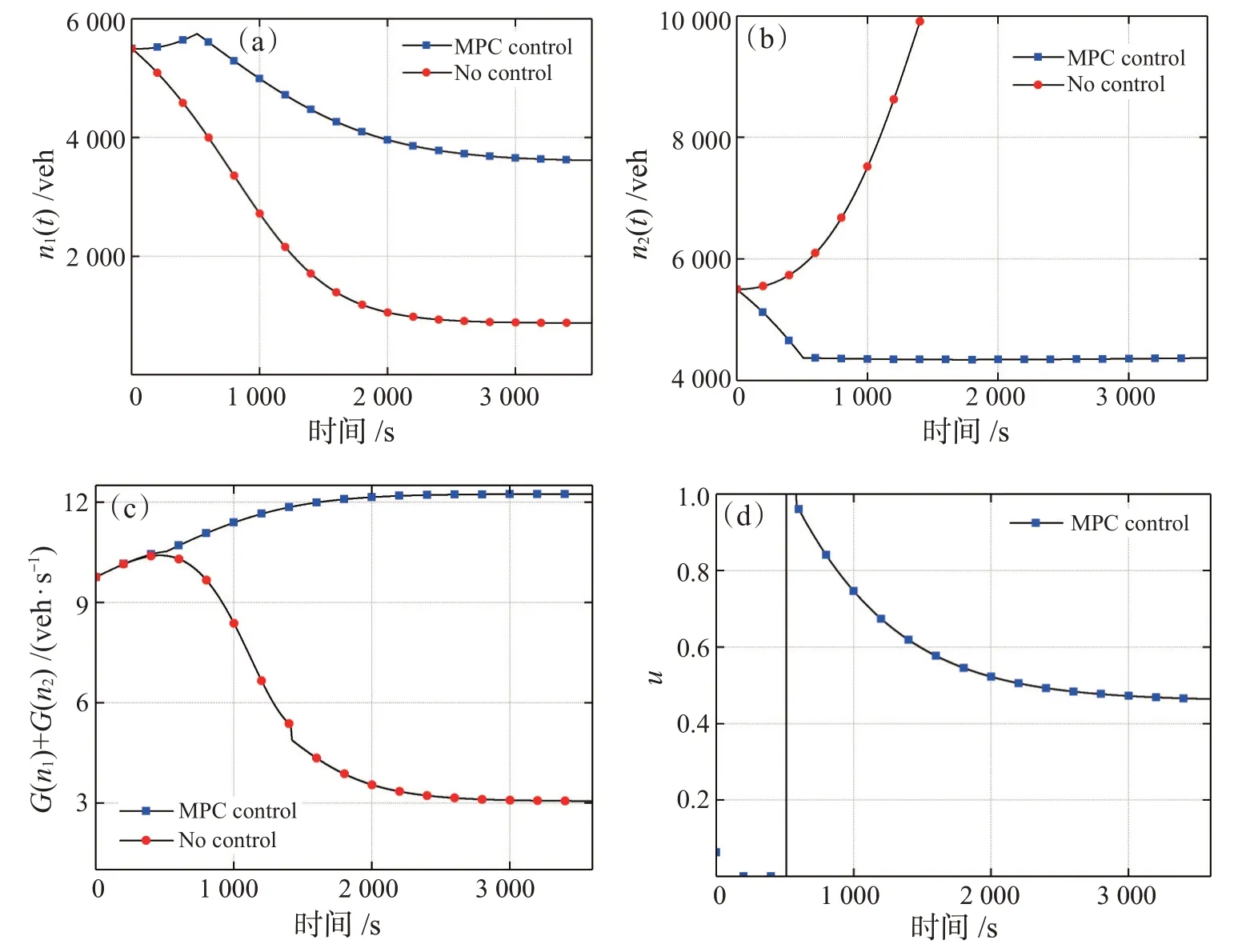
图3 交通需求量为常数时的双区域控制结果(拥堵)。(a)区域1累积量;(b)区域2累积量;(c)完成行程量;(d)MPC控制的变量u
当初始状态不拥堵时,设两个区域的初始累积量分别为n11(0)=1300,n12(0)=700,n2(0)=1500。交通需求为常数,q11=0.8,q12=4.3,q2=3,设n1,s=3000,n2,s=3600,可以计算出n11,s=385,n12,s=2 615,us=0.79。双区域边界控制模型模拟结果如图4所示。当不控制时,区域1的累积量缓慢下降,在3 600秒时到达1 780辆左右(图4a),区域2的累积量在3 600秒(图4b)时达到6 600辆,系统中完成行程的车辆数降到最低8.6(图4c),区域2陷入死锁状态。在MPC控制下,前840秒u(t)=1(图4d),允许区域1中车辆驶向区域2,区域1 的累积量在前840 秒从2 000 辆下降到1 840辆(见图4(a)),而区域2车辆累积量略微升高(图4b)。之后u(t)由最大值1开始缓慢下降,在840秒下降到0.87,即逐渐限制区域1中车辆涌入区域2,直至3 000秒处控制器稳定在0.71。由于交通需求较高,区域1中车辆累积量逐渐增加,于2 910秒累积量达到2 965辆并保持稳定;区域2的累积量也逐渐增加,在2 910秒左右达到3 545辆并保持稳定,交通拥堵得到控制(图4b)。图4c显示在MPC控制下随着两个区域累积量的逐步稳定,车辆完成行程量逐渐增加,在2 860秒时增加到12.4,并趋于稳定,交通系统效率较高。当不控制时车辆的完成行程量更低。因此,无论交通系统初始状态是否处于拥堵状态,在MPC控制下两个区域的车辆累积量趋于稳定,且分布更均匀,车辆的完成行程量更高,可缓解交通拥堵并提高交通效率。
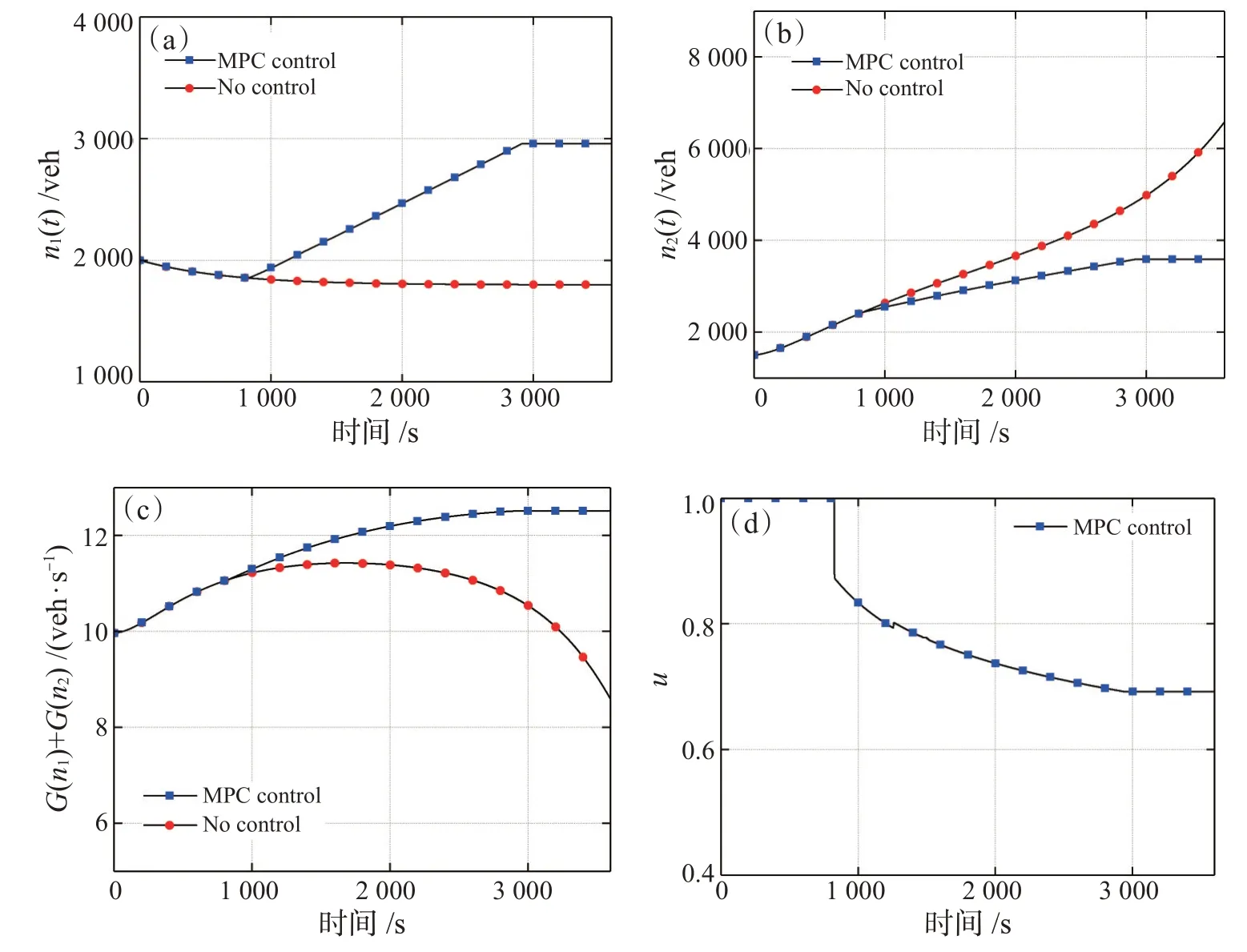
图4 交通需求量为常数时的双区域控制结果(不拥堵)。(a)区域1累积量;(b)区域2累积量;(c)完成行程量;(d)MPC控制的变量u
3.2 交通需求变化时双区域边界控制模型模拟结果
假设在起初300秒和最后300秒时交通需求量最低,低峰值保持在0.2 veh/s、0.5 veh/s和0.6 veh/s,高峰期时段持续2 400 s,分别保持在1.7 veh/s、4.7 veh/s 和3.6 veh/s,交通需求量随时间变化如图5 所示。n1,s和n2,s随交通需求量变化而变化。设两个区域的初始累积量分别为n11(0)=1300,n12(0)=700,n2(0)=1500,交通需求变化时双区域边界控制模型模拟结果如图6所示。

图5 交通需求随时间变化
当不控制时,区域1 累积量在400 秒时下降到770 辆(图6a),接着缓慢上升,于3 040秒时上升至2 850辆,随着车流量减少,在3 600秒处降至1 000辆。区域2累积量在前500秒时下降至900辆,由于在300秒后,区域1流向区域2的车辆不受控制,故区域2 的累积量一直处于波动上升状态(图6b),在3 600 秒时达到最大值7 500,此时该区域较为拥堵。与此同时,双区域车辆的完成行程量也随着累积量的变化而变化,在2 020 秒处达到最大值12.27,接着急速减少,在3 600 秒处降至最低5.7,此时系统处于完全拥塞状态(图6c)。
在MPC控制下,因交通需求变化,累积量和控制变量的稳定状态也在不断变化。区域1的累积量在前390秒内短暂下降,然后在3 240秒缓慢上升至最大值5 120辆(图6a),最后在MPC控制下累积量缓慢下降。区域2的累积量趋势与区域1基本相似(图6b),在500秒处到达最小值570辆,随后在3 000秒处升至4 460辆,在3 600秒左右降至1 950辆。在前500秒u(t)=0,禁止区域1的车辆驶向区域2;之后控制器u在700 s内持续是1.00,1 200秒后持续在0.84上下浮动,在3 000秒处稍微下降至0.78,随后30秒后降至0.4,又在40秒后升至0.47,之后在3 090秒处降为0并持续到3 600秒,即进入区域2的车辆得到完全控制(图6d)。图6c 显示在MPC 控制下随着两个区域累积量的控制,车辆的完成行程量逐渐增加,在2 000秒时增加到12.6,交通系统效率较高。然而,不控制时车辆的完成行程量更低,说明MPC控制确实起到了良好效果,两个区域车辆累积量趋于平衡,且分布更均匀,车辆的完成行程量更高,从而可缓解交通拥堵并提高交通效率。
仿真结果表明MPC对交通系统的各种拥堵状态的控制都有效,可使两个区域在有限时域内的累积量和控制量的闭环稳定,并促使两个区域累积量平衡[5,7],从而防止区域拥堵,提高交通效率。当交通需求为常数,在不控制情况下,初始状态拥堵时区域2很快到达堵塞累积量(10 000辆),交通系统陷入死锁状态;初始状态不拥堵时区域2 的累积量也在逐渐增加,在模拟时间内也进入拥堵状态。在MPC 控制下,无论初始状态车辆是否拥塞,系统中两个区域累积量最终都能达到稳定状态,且车辆的完成行程量更大。当交通需求变化时,在不控制情况下,区域2容易陷入拥堵状态;在MPC控制下,系统中两个区域的累积量更均衡,车辆的完成行程量更高。
4 结论
本文建立了一个基于MFD的城市交通系统双区域边界控制模型,采用模型预测控制方法对系统进行宏观控制,并对交通需求为常数和交通需求变化的两种交通状态进行仿真,结果显示在MPC控制下交通系统性能提升较大,能有效控制和平衡高峰期区域累积量,且缓解交通拥堵,从而缩短控制时间和降低控制成本。
